异步电机矢量控制仿真
- 格式:doc
- 大小:304.50 KB
- 文档页数:5
目录1 异步电动机矢量控制原理 (2)2 坐标变换 (3)2.1 坐标变换基本思路 (3)2.2 三相——两相坐标系变换(3/2变换) (4)2.3 旋转变换 (5)3 转子磁链计算 (6)4 矢量控制系统设计 (7)4.1 矢量控制系统的电流闭环控制方式思想 (7)4.2 MATLAB系统仿真系统设计 (8)4.3 PI调节器设计 (9)5 仿真结果 (10)5.1 电机定子侧的电流仿真结果 (10)5.2 电机输出转矩仿真结果 (11)心得体会 (13)参考文献 (14)异步电机矢量控制Matlab 仿真实验1 异步电动机矢量控制原理矢量控制系统的基本思路是以产生相同的旋转磁动势为准则,将异步电动机在静止三相坐标系上的定子交流电流通过坐标变换等效成同步旋转坐标系上的直流电流,并分别加以控制,从而实现磁通和转矩的解耦控制,以达到直流电机的控制效果。
所谓矢量控制,就是通过矢量变换和按转子磁链定向,得到等效直流电动机模型,在按转子磁链定向坐标系中,用直流电动机的方法控制电磁转矩与磁链,然后将转子磁链定向坐标系中的控制量经变换得到三相坐标系的对应量,以实施控制。
其中等效的直流电动机模型如图1-1所示,在三相坐标系上的定子交流电流i A 、i B 、i C ,通过3/2变换可以等效成两相静止正交坐标系上的交流i sα和i sβ,再通过与转子磁链同步的旋转变换,可以等效成同步旋转正交坐标系上的直流电流i sm 和i st 。
图1-1 异步电动机矢量变换及等效直流电动机模型在三相坐标系上的定子交流电流,,A B C i i i ,通过3/2变换可以等效成两相静止正交坐标系上的交流s i α和s i β再通过与转子磁链同步的旋转变换,可以等效成同步旋转正交坐标系上的直流电流sm i 和st i 。
m 绕组相当于直流电动机的励磁绕组,sm i 相当于励磁电流,t 绕组相当于电枢绕组,st i 相当于与转矩成正比的电枢电流。
基于MatlabSimulink的异步电机矢量控制系统仿真一、本文概述随着电力电子技术和控制理论的不断发展,异步电机矢量控制系统已成为现代电机控制领域的重要分支。
该系统通过精确控制异步电机的磁通和转矩,实现了对电机的高效、稳定和动态性能的优化。
Matlab/Simulink作为一种强大的仿真工具,为异步电机矢量控制系统的研究和设计提供了便捷的平台。
本文旨在探讨基于Matlab/Simulink的异步电机矢量控制系统仿真方法。
文章将简要介绍异步电机矢量控制的基本原理和关键技术,包括空间矢量脉宽调制(SVPWM)技术、转子磁链观测技术以及矢量控制策略等。
详细阐述如何利用Matlab/Simulink搭建异步电机矢量控制系统的仿真模型,包括电机模型、控制器模型以及系统仿真模型的构建过程。
文章还将探讨仿真模型的参数设置、仿真过程以及仿真结果的分析方法。
通过本文的研究,读者可以深入了解异步电机矢量控制系统的基本原理和仿真方法,掌握基于Matlab/Simulink的仿真技术,为异步电机矢量控制系统的实际设计和应用提供有益的参考和借鉴。
本文的研究也有助于推动异步电机矢量控制技术的发展和应用领域的拓展。
二、异步电机基本原理异步电机,又称感应电机,是一种广泛应用于工业领域的电动机。
其基本原理基于电磁感应和电磁力作用。
异步电机主要包括定子(静止部分)和转子(旋转部分)。
定子通常由铁芯和三相绕组构成,而转子则可能由实心铁芯、鼠笼型或绕线型结构组成。
当异步电机通电时,定子绕组中的三相电流会产生旋转磁场。
这个旋转磁场与转子中的导体相互作用,根据法拉第电磁感应定律,会在转子导体中产生感应电动势和感应电流。
这些感应电流在旋转磁场的作用下,受到电磁力的作用,从而使转子产生旋转力矩,驱动转子旋转。
异步电机的旋转速度与定子旋转磁场的旋转速度并不完全同步,这也是其被称为“异步”电机的原因。
异步电机的旋转速度通常略低于旋转磁场的同步速度,这是由于转子导体的电感和电阻导致的电磁延迟效应。
太原理工大学毕业设计(论文)任务书异步电动机转差频率间接矢量控制matlab仿真摘要本文基于MATLAB 对异步电动机转差频率控制调速系统进行仿真研究。
首先分析了异步电动机转差频率控制技术的主要控制方法、基本组成与工作原理。
之后对异步电机的动态模型做了分析,进一步介绍了异步电机的坐标变换,对异步电机转差频率矢量控制系统的基本原理进行了阐述,通过仿真工作,证明了其可行性。
最后,通过对仿真结果进行分析,归纳出如下结论:单纯的转差频率控制带载能力差,应用转差频率矢量控制可增强电机对转矩的调节能力且无需电压补偿。
关键词:转差频率,矢量控制,异步电动机Induction Motor Slip Frequency Indirect Vector ControlMatlab SimulationAbstractThis paper focuses on the matlab simulation of the asynchronous motor speed regulation system.Firstly , this paper analyzes the main control method , basic composition and working principle of the induction motor slip frequency control technology.Secondly , this paper analysis the dynamic model of asynchronous motor and further introduces the coordinate transfer and the basic principle of motor slip frequency vector control system. At the same time , the simulation work to prove its feasibility.Finally , according to analysis of the simulation results , the conclusions are as follows simply slip frequency control is always with poor load capacity , on the contrary the vector control applications can enhance the ability to regulate the motor of the torque and without voltage compensation.Key words : slip frequency , vector control , induction motor目录摘要 (I)Abstract (II)1绪论 (1)1.1现代交流调速技术的发展 (1)1.1.1异步电动机交流调速系统的类型 (2)1.1.2交流调速系统的发展趋势和动向 (2)1.2本文主要研究内容 (2)1.2.1转差频率控制的基本概念 (2)1.2.2基于异步电动机稳态模型控制的转差频率控制规律 (4)1.2.3基于异步电动机动态态模型控制的转差频率矢量控制规律 (5)2异步电动机转差频率间接矢量控制交流调速系统 (7)2.1异步电机的特点 (7)2.2三相异步电动机的多变量非线性数学模型 (7)2.2.1电压方程 (8)2.2.2磁链方程 (9)2.2.3转矩方程 (11)2.2.4电力拖动系统运动方程 (11)2.3矢量控制技术思想 (12)2.3.1坐标变换 (13)1.坐标变换的基本思想和原则 (13)2.三相-两相变换(3s/2s变换) (15)2.3.2交流异步电机在两相任意旋转坐标系上的数学模型 (18)2.3.3异步电机在两相静止坐标系( 坐标系)上的数学模型 (20)2.3.4异步电机在两相同步旋转系上的数学模型 (21)2.3.5三相异步电动机在两相坐标系上的状态方程 (21)2.4基于转差频率矢量控制调速系统的组成 (22)2.4.1基于转差频率间接矢量控制调速系统的工作原理 (22)2.4.2异步电动机转差频率间接矢量控制公式推导 (24)3主电路与控制电路 (25)3.1 SPWM逆变电路 (25)3.2控制电路的设计 (26)3.2.1转速PI调节器的设计 (26)3.2.2函数运算模块的设计 (28)4转差频率间接矢量控制的matlab仿真 (30)4.1仿真模型的搭建及参数设置 (30)4.1.1主电路模型 (30)4.1.2控制电路的模型搭建 (31)4.2仿真结果与分析 (33)4.2.1仿真波形图 (33)4.2.2仿真结果分析 (35)4.3本章总结 (35)参考文献 (36)致谢 (37)1绪论1.1现代交流调速技术的发展在工业化的进程中 ,电动机作为将电能转换为机械能的主要设备。
异步电机矢量控制Matlab仿真实验1 异步电机动态模型推导1.1 异步电机动态数学模型的性质电磁耦合是机电能量转换的必要条件,电流与磁通的乘积产生转矩,转速与磁通的乘积得到感应电动势。
无论是直流电动机,还是交流电动机均如此。
交、直流电动机结构和工作原理的不同,至使表达式差异很大。
异步电动机的动态数学模型是一个高阶、非线性、强耦合的多变量系统。
(1)变压变频调速时需要进行电压(或电流)和频率的协调控制,有电压(或电流)和频率两种独立的输入变量。
在输出变量中,除转速外,磁通也是一个输出变量。
因此异步电机是一个多变量(多输入多输出)系统。
(2)异步电动机无法单独对磁通进行控制,电流乘磁通产生转矩,转速乘磁通产生感应电动势,在数学模型中含有两个变量的乘积项。
因此即使不考虑磁路不饱和等因素,数学模型也是非线性的。
(3)三相异步电动机三相绕组存在交叉耦合,每个绕组都有各自的电磁惯性,再考虑运动系统的机电惯性,转速与转角的积分关系等,动态模型是一个高阶系统。
1.2 异步电动机的三相数学模型1.2.1 异步电机三相数学模型的前提假设在研究异步电机数学模型时,作如下的假设(1)忽略空间谐波,三相绕组对称,产生的磁动势沿气隙按正弦规律分布。
(2)忽略磁路饱和,各绕组的自感和互感都是恒定的。
(3)忽略铁心损耗。
(4)不考虑频率变化和温度变化对绕组电阻的影响。
无论异步电动机转子是绕线型还是笼型的,都可以等效成三相绕线转子,并折算到定子侧,折算后的定子和转子绕组匝数相等。
异步电动机三相绕组可以是Y连接,也可以是Δ连接。
若三相绕组为Δ连接,可先用Δ—Y变换,等效为Y 连接。
然后,按Y连接进行分析和设计。
三相异步电机的物理模型如下图1所示,定子三相绕组轴线A、B、C在空间是固定的,转子绕组轴线a、b、c随转子以角转速w旋转。
图1 三相异步电动机的物理模型1.2.2 异步电机的三相动态模型的数学表达式异步电动机的动态模型由磁链方程、电压方程、转矩方程和运动方程组成。
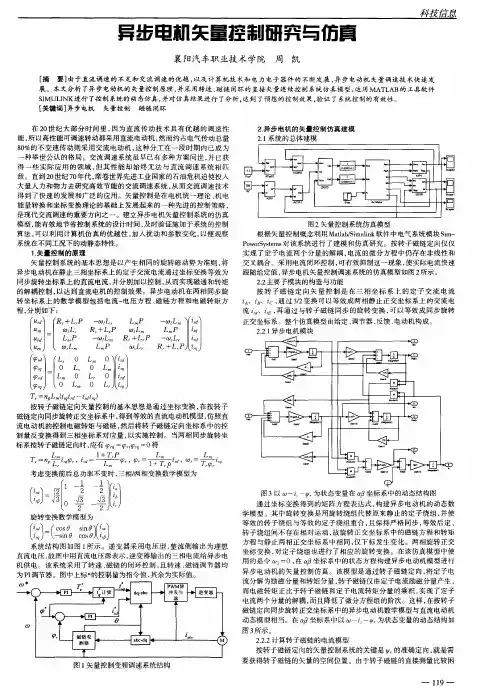
第12卷 第2期2008年3月电 机 与 控 制 学 报ELE CTR IC M ACH I NE S AND CONTRO LVo l 12N o 2M ar .2008异步电机S VP WM 矢量控制仿真分析张春喜, 廖文建, 王佳子(哈尔滨理工大学电气与电子工程学院,哈尔滨150040)摘 要:为了给实际电机控制系统提供必要的设计参数,依据异步电机矢量控制理论及空间电压矢量脉宽调制原理,在M atlab /Si m u li n k 下建立了基于空间电压矢量脉宽调制的异步矢量控制仿真模型,并针对仿真中的关键问题及系统的仿真结果进行了分析。
仿真结果表明,采用该控制系统电流、转矩波动小,转速响应迅速,系统的各项指标都满足电机实际运行特性要求。
关键词:空间电压矢量脉宽调制;矢量控制;仿真;异步电机中图分类号:TM 464文献标识码:A文章编号:1007-449X (2008)02-0160-04Si m ul ation analysis i n SVP WM vector control foras ynchronous motorZ HANG Chun -x,i LIAO W en -jian , WANG Jia -zi(Co ll ege of E l ectrical and E lectron ic Eng i neer i ng ,H a rbin U n i versity of Sc i ence and T echno logy ,H arb i n 150040)Abst ract :To prov ide the necessary design para m e ters for t h e actua lm otor contro l syste m ,the si m ulation m o led of vecto r contr o l syste m based on space vector pu lse w idth m odu lation (SVP WM )fo rA sychronousM otor is estab lished inMATLAB /Si m u li n k ,acco r d i n g to t h e princ i p le o fSVP WM and the theory of vector contro l syste m.The key prob le m s and resu lts of the si m ulation w ere analyzed i n detai.l The resu lts sho w that t h is syste m has s m a ller fluct u ations of current and torque ,qu icker response speed ,and all of the in -d icato rs accord w it h the perfor m ance of t h e actualm otor .K ey w ords :space vector pulse w i d th m odu lation ;vector con tro;l si m u lation ;asynchronous m oto r收稿日期:2007-09-12作者简介:张春喜(1964-),男,博士,教授,主要研究方向电机驱动控制、开关电源;廖文建(1983-),男,硕士研究生,主要研究方向交流调速;王佳子(1983-),女,硕士研究生,主要研究方向交流调速。
基于Matlab转差频率控制的矢量控制系统的仿真概述:常用的电机变频调速控制方法有电压频率协调控制(即v/F比为常数)、转差频率控制、矢量控制以及直接转矩控制等。
其中,矢量控制是目前交流电动机较先进的一种控制方式。
它又有基于转差频率控制的、无速度传感器和有速度传感器等多种矢量控制方式。
其中基于转差频率控制的矢量控制方式是在进行U /f恒定控制的基础上,通过检测异步电动机的实际速度n,并得到对应的控制频率f,然后根据希望得到的转矩,分别控制定子电流矢量及两个分量间的相位,对输出频率f进行控制的。
采用这种控制方法可以使调速系统消除动态过程中转矩电流的波动,从而在一定程度上改善了系统的静态和动态性能,同时它又具有比其它矢量控制方法简便、结构简单、控制精度高等特点。
Simulink仿真系统是Matlab最重要的组件之一,系统提供了标准的模型库,能够帮助用户在此基础上创建新的模型库,描述、模拟、评价和细化系统,从而达到系统分析的目的。
在此利用Matlab/Simulink软件构建了转差频率矢量控制的异步电机调速系统仿真模型,并对此仿真模型进行了实验分析。
矢量控制是目前交流电动机的先进控制方式,一般将含有矢量交换的交流电动机控制都称为矢量控制,实际上只有建立在等效直流电动机模型上,并按转子磁场准确定向地控制,电动机才能获得最优的动态性能。
转差频率矢量控制系统结构简单且易于实现,控制精度高,具有良好的控制性能、因此,早起的矢量控制通用变频器上采用基于转差频率控制的矢量控制方式。
基于此,本文在Mtalab/Simulink环境下对转差频率矢量控制系统进行了仿真研究。
1转差频率矢量控制系统由于异步电机的动态数学模型是一个高阶、非线性、强耦合的多变量系统。
转差频率矢量控制是按转子磁链定向的间接矢量控制系统,不需要进行复杂的磁通检测和繁琐的坐标变换,只要在保证转子磁链大小不变的前提下,通过检测定子电流和旋转磁场角速度,通过两相同步旋转坐标系(M-T坐标系)上的数学模型运算就可以实现间接的磁场定向控制。
2.5异步电机基于磁场定向的矢量控制系统仿真
学号:S16085207020 姓名:李端凯
图1 矢量控制仿真模型整体结构图
图2 id*求解模块
图3 iq*求解模块
图4 DQ到ABC坐标转换模块
图5 求解转子磁链角模块
图6-1 ABC到DQ坐标转换模块
在这一部分转换中包含两种变换——3/2变换和旋转变换。
在交流电动机中三相对称绕组通以三相对称电流可以在电动机气隙中产生空间旋转的磁场,在功率不变的条件下,按磁动势相等的原则,三相对称绕组产生的空间旋转磁场可以用两相对称绕组来等效,三相静止坐标系和两相静止坐标系的变换则建立了磁动势不变情况下,三相绕组和两相绕组电压、电流和磁动势之间的关系。
图1绘出了ABC 和αβ两个坐标系中的磁动势矢量,按照磁动势相等的等效原则,三相合成磁动势与两相合成磁动势相等,故两套绕组磁动势在α、β轴上的投影都应相等,于是得:
()233332333cos60cos6011 ()22
sin 60sin 602a b c a b c b c b c N i N i N i N i N i i i N i N i N i N i i αβ=--=--=-=+
写成矩阵形式: 图6-2 ABC 和αβ两个坐标系中的磁动势矢量
111220a b c i i i i i αβ⎤⎡⎤--
⎥⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦⎢⎥⎣⎦⎣ 再就是旋转变换,两相静止坐标系和两相旋转坐标系的变换(简称2s/2r 变换),两相静止绕组,通以两相平衡交流电流,产生旋转磁动势。
如果令两相绕组转起来,且旋转角速度等于合成磁动势的旋转角速度,则两相绕组通以直流电流就产生空间旋转磁动势。
从两相静止坐标系到两相旋转坐标系的变换,称为两相旋转-两相静止变换,简称2s/2r 变换。
其变换关系为:
cos sin sin cos d q i i i i αβφφφφ-⎡⎤⎡⎤⎡⎤=⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦
由此整理得到:
111cos sin 22sin cos 0a d b q c i i i i i φφφφ⎡⎤⎡⎤--
⎢⎥⎡⎤⎤⎢⎥⎢=⎢⎥⎥⎢⎥-⎢⎦⎣⎦⎢⎥⎣⎦⎢⎣ 同理可得:DQ 到ABC 坐标转换则是其逆变换。
图7 求解磁链模块
图8. 电流滞环模块结构框图 异步电机参数:功率 3.7n P k W =,线电压410AB U V =,额定转速
120/n w rad s =,极对数p=2,定子绕组电阻,转子绕组电阻0.228r R ohms =,定子绕组自感和转子绕组自感0.8s r L L mH ==,定、转子之间的互感34.7m L mH =, 转动惯量。
速度控制模器参数为=900,。
电流滞环比较器带宽20。
系统空载启动,待进入稳态后,在t=0.5s
时突加负载100L T N m = ,可得系统转矩Te 、转速w 和定子三相电流以及线电压Uab 的仿真曲线。
仿真结果
电机定子侧的电流(Iabc )仿真结果如图9-2所示。
从t=0s 启动时,转速增大,定子电流逐渐减小,t=0.28s 时稳定。
系统在t=0.5s 时突加负载。
由仿真结果可知:空载起动时,定子电流基本稳定不变,成正弦变化。
在t=0.5s 突加负载后,电流仍成正弦变化,幅值变大,但基本保持稳定。
当t=0.5s 突加负载后,电流幅值突然加大,然后有一定的回落直到稳定运行,此时电流仍成交流变化,幅值大于空载运行时。
电机输出转矩Te 的仿真结果如图9-3所示。
结果表明,电机在空载启动时,输出转矩会有一个突变到较大值,随着电机的启动输出转矩减小直至为0并稳定运行。
在突加负载后,通过系统的闭环控制,使得电机输出转矩突增并超过给定负载转矩一定值,以保证电机正常运行,逐渐稳定后输出转矩回落到给定值,输出转矩等于负载转矩,电机稳定运行。
电机的转子速度W 仿真结果如图9-4所示。
可见,电机起动后,转速成线性上升,当上升到给定值时,速度控制器的输出由于积分作用还维持在幅值。
转
速超调后使得速度控制器退饱和从而稳定在给定值。
突加负载后,转速轻微下降,但由于采用的是PI调节器,它具有消除静差的作用,所以转速很快上升微调继续保持在给定值。
图9-1 线电压仿真波形
图9-2 定子侧电流仿真波形
图9-3 转矩仿真波形
图9-4 转速仿真波形。