Simulink异步电机矢量控制(全文)
- 格式:doc
- 大小:329.00 KB
- 文档页数:5
精品文档-下载后可编辑异步电机矢量控制目录1引言.....................................................1.1 交流电机调速系统发展的现状..............................1.2 矢量控制的现状..........................................1.3 课题的研究背景及意义....................................1.4 本课题的主要内容........................................2 矢量控制的基本原理.......................................2.1 坐标变换的基本思路......................................2.2 矢量控制坐标变换........................................2.3 矢量控制系统结构........................................3 转子磁链定向的矢量控制方程及解耦控制.....................4 转速、磁链闭环控制的矢量控制系统.........................4.1 带磁链除法环节的直接矢量控制系统........................4.2 带转矩内环的直接矢量控制系统............................5 控制系统的设计与仿真.....................................5.1 矢量控制系统的设计......................................5.2 异步电动机的重要子模块模型.............................5.3 系统仿真结果和分析......................................6 结论.....................................................1。
基于MatlabSimulink的异步电机矢量控制系统仿真一、本文概述随着电力电子技术和控制理论的不断发展,异步电机矢量控制系统已成为现代电机控制领域的重要分支。
该系统通过精确控制异步电机的磁通和转矩,实现了对电机的高效、稳定和动态性能的优化。
Matlab/Simulink作为一种强大的仿真工具,为异步电机矢量控制系统的研究和设计提供了便捷的平台。
本文旨在探讨基于Matlab/Simulink的异步电机矢量控制系统仿真方法。
文章将简要介绍异步电机矢量控制的基本原理和关键技术,包括空间矢量脉宽调制(SVPWM)技术、转子磁链观测技术以及矢量控制策略等。
详细阐述如何利用Matlab/Simulink搭建异步电机矢量控制系统的仿真模型,包括电机模型、控制器模型以及系统仿真模型的构建过程。
文章还将探讨仿真模型的参数设置、仿真过程以及仿真结果的分析方法。
通过本文的研究,读者可以深入了解异步电机矢量控制系统的基本原理和仿真方法,掌握基于Matlab/Simulink的仿真技术,为异步电机矢量控制系统的实际设计和应用提供有益的参考和借鉴。
本文的研究也有助于推动异步电机矢量控制技术的发展和应用领域的拓展。
二、异步电机基本原理异步电机,又称感应电机,是一种广泛应用于工业领域的电动机。
其基本原理基于电磁感应和电磁力作用。
异步电机主要包括定子(静止部分)和转子(旋转部分)。
定子通常由铁芯和三相绕组构成,而转子则可能由实心铁芯、鼠笼型或绕线型结构组成。
当异步电机通电时,定子绕组中的三相电流会产生旋转磁场。
这个旋转磁场与转子中的导体相互作用,根据法拉第电磁感应定律,会在转子导体中产生感应电动势和感应电流。
这些感应电流在旋转磁场的作用下,受到电磁力的作用,从而使转子产生旋转力矩,驱动转子旋转。
异步电机的旋转速度与定子旋转磁场的旋转速度并不完全同步,这也是其被称为“异步”电机的原因。
异步电机的旋转速度通常略低于旋转磁场的同步速度,这是由于转子导体的电感和电阻导致的电磁延迟效应。
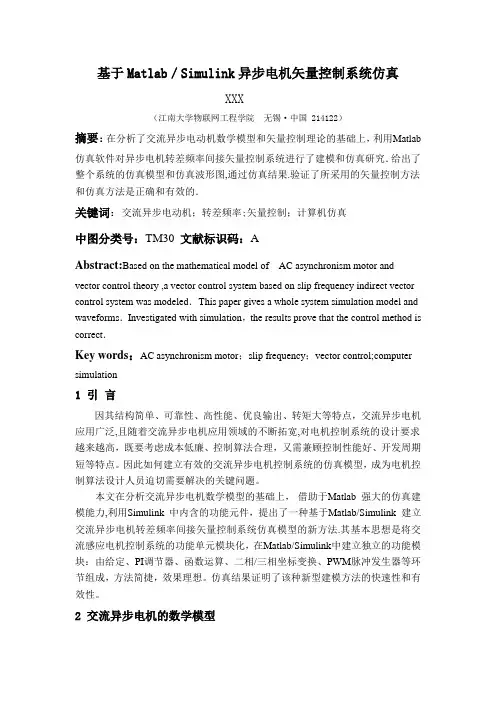
基于Matlab/Simulink异步电机矢量控制系统仿真XXX(江南大学物联网工程学院无锡·中国 214122)摘要:在分析了交流异步电动机数学模型和矢量控制理论的基础上,利用Matlab 仿真软件对异步电机转差频率间接矢量控制系统进行了建模和仿真研究.给出了整个系统的仿真模型和仿真波形图,通过仿真结果.验证了所采用的矢量控制方法和仿真方法是正确和有效的.关键词:交流异步电动机;转差频率;矢量控制;计算机仿真中图分类号:TM30 文献标识码:AAbstract:Based on the mathematical model of AC asynchronism motor and vector control theory ,a vector control system based on slip frequency indirect vector control system was modeled.This paper gives a whole system simulation model and waveforms.Investigated with simulation,the results prove that the control method is correct.Key words:AC asynchronism motor;slip frequency;vector control;computer simulation1 引言因其结构简单、可靠性、高性能、优良输出、转矩大等特点,交流异步电机应用广泛,且随着交流异步电机应用领域的不断拓宽,对电机控制系统的设计要求越来越高,既要考虑成本低廉、控制算法合理,又需兼顾控制性能好、开发周期短等特点。
因此如何建立有效的交流异步电机控制系统的仿真模型,成为电机控制算法设计人员迫切需要解决的关键问题。
本文在分析交流异步电机数学模型的基础上,借助于Matlab 强大的仿真建模能力,利用Simulink 中内含的功能元件,提出了一种基于Matlab/Simulink 建立交流异步电机转差频率间接矢量控制系统仿真模型的新方法.其基本思想是将交流感应电机控制系统的功能单元模块化,在Matlab/Simulink中建立独立的功能模块:由给定、PI调节器、函数运算、二相/三相坐标变换、PWM脉冲发生器等环节组成,方法简捷,效果理想。

基于Matlab/Simulink 的异步电机矢量控制系统仿真摘要在异步电机的数学模型分析中以及矢量控制系统的基础之上,利用Matlab/Simulink运用建立模块的思想分别组建了坐标变换模块、PI调节模块、转子磁链个观测模块、SVPWM等模块,然后将这些模块有机的结合,最后构成了异步电动机矢量控制的仿真模块,并且进行了仿真验证。
仿真结果分别显示了电机空载与负载情况下转矩、转速的动态变化曲线,验证了该方法的有效性、实用性,为电机在实际使用中打下了坚实的基础。
本文主要研究异步电机在矢量控制下的仿真。
使用Matlab/Simulink中的电气系统模块(PowerSystem Blocksets)将其重组得到新的模型并对其仿真,最后分析仿真结果得出结论。
关键词: 异步电机矢量控制 MATLAB/SIMULINK 变频调速目录摘要 (I)Abstract......................................................................................... 错误!未定义书签。
1 绪论 (1)1.1 电机及电力拖动技术的发展概况 (1)1.2 异步电动机的控制技术现状................................................. 错误!未定义书签。
1.3 仿真软件的简介及其选择..................................................... 错误!未定义书签。
1.4 论文的主要内容及结构安排................................................. 错误!未定义书签。
2 异步电动机的数学模型 (4)2.1 异步电动机的稳态数学模型 (4)2.2 异步电动机的动态数学模型 (5)2.3 本章小结 (7)3 矢量控制系统基本思路 (8)3.1 矢量控制的基本原理 (8)3.2 坐标变换 (9)3.3SVPWM调制 (21)3.3本章小结 (11)4 异步电机矢量控制系统仿真 (14)4.1矢量控制系统模型 (14)4.2仿真结果与分析 (15)4.5本章小结 (17)5结论与展望 (18)5.1结论 (18)5.2后续研究工作的展望 (19)参考文献 ....................................................................................... 错误!未定义书签。
基于simulink异步电动机矢量控制系统的仿真由于交流异步电动机属于一个高阶、非线性、多变量、强耦合系统。
数学模型比较复杂,将其简化成单变量线性系统进行控制,达不到理想性能。
为了实现高动态性能,提出了矢量控制的方法。
所谓矢量控制就是采用坐标变换的方法,以产生相同的旋转磁势和变换后功率不变为准则,建立三相交流绕组、两相交流绕组和旋转的直流绕组三者之间的等效关系,从而求出异步电动机绕组等效的直流电机模型,以便按照对直流电机的控制方法对异步电动机进行控制。
因此,它可以实现对电机电磁转矩的动态控制,优化调速系统的性能。
Matlab是一种面向工程计算的高级语言,其Simulink环境是一种优秀的系统仿真工具软件,使用它可以大大提高系统仿真的效率和可靠性。
本文在此基础上构造了一个矢量控制的交流电机矢量控制调速系统,包含了给定、PI调节器、函数运算、二相/三相坐标变换、PWM脉冲发生器等环节,并给出了仿真结果。
1.异步电动机的动态数学模型异步电动机的动态数学模型是一个高阶、非线性、强耦合的多变量系统。
在研究异步电动机的多变量非线性数学模型时,常作如下的假设:1)忽略空间谐波,设三相绕组对称,在空间中互差120°电角度,所产生的磁动势沿气隙周围按正弦规律分布。
2)忽略励磁饱和,认为各绕组的自感和互感都是恒定的。
3)忽略铁心损耗。
4)不考虑频率变化和温度变化对绕组的影响。
无论电动机转子是绕线形还是笼形,都将它等效成三相绕线转子,并折算到定子侧,折算后的定子和转子绕组匝数都相等。
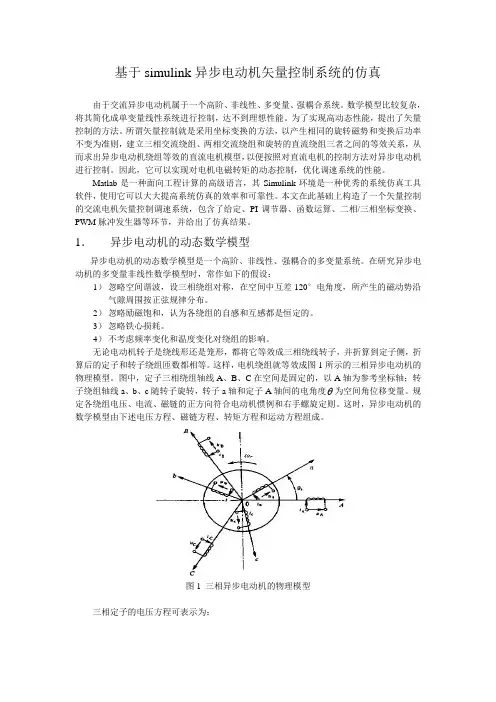
这样,电机绕组就等效成图1所示的三相异步电动机的物理模型。
图中,定子三相绕组轴线A、B、C在空间是固定的,以A轴为参考坐标轴;转子绕组轴线a、b、c随转子旋转,转子a轴和定子A轴间的电角度 为空间角位移变量。
规定各绕组电压、电流、磁链的正方向符合电动机惯例和右手螺旋定则。
这时,异步电动机的数学模型由下述电压方程、磁链方程、转矩方程和运动方程组成。
基于Matlab/Simulink 的异步电机矢量控制系统仿真摘要在异步电机的数学模型分析中以及矢量控制系统的基础之上,利用Matlab/Simulink运用建立模块的思想分别组建了坐标变换模块、PI调节模块、转子磁链个观测模块、SVPWM等模块,然后将这些模块有机的结合,最后构成了异步电动机矢量控制的仿真模块,并且进行了仿真验证。
仿真结果分别显示了电机空载与负载情况下转矩、转速的动态变化曲线,验证了该方法的有效性、实用性,为电机在实际使用中打下了坚实的基础。
本文主要研究异步电机在矢量控制下的仿真。
使用Matlab/Simulink中的电气系统模块(PowerSystem Blocksets)将其重组得到新的模型并对其仿真,最后分析仿真结果得出结论。
关键词: 异步电机矢量控制 MATLAB/SIMULINK 变频调速目录摘要 (I)Abstract......................................................................................... 错误!未定义书签。
1 绪论 (1)1.1 电机及电力拖动技术的发展概况 (1)1.2 异步电动机的控制技术现状................................................. 错误!未定义书签。
1.3 仿真软件的简介及其选择..................................................... 错误!未定义书签。
1.4 论文的主要内容及结构安排................................................. 错误!未定义书签。
2 异步电动机的数学模型 (4)2.1 异步电动机的稳态数学模型 (4)2.2 异步电动机的动态数学模型 (5)2.3 本章小结 (7)3 矢量控制系统基本思路 (8)3.1 矢量控制的基本原理 (8)3.2 坐标变换 (9)3.3SVPWM调制 (21)3.3本章小结 (11)4 异步电机矢量控制系统仿真 (14)4.1矢量控制系统模型 (14)4.2仿真结果与分析 (15)4.5本章小结 (17)5结论与展望 (18)5.1结论 (18)5.2后续研究工作的展望 (19)参考文献 ....................................................................................... 错误!未定义书签。
基于MATLAB_SIMULINK的异步电机矢量控制调速系统仿真优秀doc资料文章编号:100022472(2000022*******基于M AT LAB SI M U L I NK的异步电机矢量控制调速系统仿真Ξ杨洋,张桂香(湖南大学机械与汽车工程学院,湖南长沙410082摘要:从异步电机矢量控制数学模型入手,介绍一种基于M A TLAB S I M UL I N K的异步电机按转子磁场定向的矢量控制系统仿真模型Λ该模型可通用于异步笼型电机,使用时只需输入不同电机参数即可Λ通过仿真实验验证了模型的正确性Λ关键词:异步电机;矢量控制;M A TLAB S I M UL I N K;仿真中图分类号:TM921.51文献标识码: ASi m ulati on of V ector Control Inducti on M otor A djusting Syste m Based on M A TLAB S I M UL I N KYAN G Yang,ZHAN G Gui2x iang(Co llege of M echan ical and A utomo tive Engineering,H unan U n iv,Changsha 410082,Ch inaAbstract:A si m ulati on model of vecto r con tro l inducti on mo to r adjusting syste m w ith the reference fra m e fixed to the ro to r is established.T he model can beconven ien tly used by inputting p roper mo to r para m eters.Si m ulati on s show the validity of the model.Key words:inducti on mo to r;vecto r con tro l;M A TLAB S I M UL I N K;si m ulati on0引言矢量控制理论的提出使异步电机调速性能达到甚至超过直流电机调速性能成为可能,而且运用矢量控制已成为当今交流变频调速系统的主流Λ在进行复杂的系统设计时,采取计算机仿真方法来分析和研究交流调速系统性能是非常有效和必要的Λ传统的计算机仿真软件包用微分方程和差分方程建模,直观性、灵活性差,编程量大,操作不便ΛM A TLAB是一个高度集成的软件系统,集科学计算、图象处理、声音处理于一体,具有极高的编程效率ΛM A TLAB提供的S I M UL I N K是一个用来对动态系统进行建模、仿真和分析的软件包,它具有模块化、可重栽、可封装、面向结构图编程及可视化等特点,可大大提高系统仿真的效率和可靠性ΛS I M UL I N K提供有Sink s(输出方式、Source(输入源、Ξ收稿日期:2000202229作者简介:杨洋(1970-,女,湖南长沙人,湖南大学硕士生.D iscrete (离散时间环节、L inear (线性环节、N on linear (非线性环节、Connecti on s (连接与接口、Ex tra (其他环节子模型库Λ用户可以方便定制和创建自己的模型、模块Λ在多种矢量控制方法中,按转子磁场定向的矢量控制运用较为普遍,本文将结合这种矢量控制和S I M UL I N K 的特点,介绍一种异步电机按转子磁场定向的矢量控制系统的建模仿真方法Λ模型将为同类调速系统提供有效、可靠的研究分析依据Λ1异步电机矢量控制系统的仿真模型异步电机的矢量控制相当于把直流电机换向器的功能通过控制的方法来实现,从而达到磁通和转矩单独控制的目的Λ根据感应电机的坐标变换理论,在三相坐标系下的定子输入的电流通过3s 2r 交换,由三相静止坐标变换为两相垂直的静止坐标,再通过从两相静止坐标系到两相旋转坐标系M ,T 轴的变换,并且使得M 轴沿转子总磁链矢量的方向,最终获得等效成同步旋转坐标系下的直流电流i m 1,i t 1,这样异步电机通过坐标变换,变成一台由i m 1,i t 1输入的直流电机Ζ矢量控制系统的构想就是模仿直流电机的控制方法,求得直流电机的控制量,经过相应的坐标反变换,重新获得三相输入电流(或电压,就能控制异步电机了Ζ根据异步电机理论,经坐标变换后,笼型异步电机在同步旋转坐标上按转子磁场定向的电压矩阵方程(转子短路,u m 2=u t 2=0为u m 1u t 10=R 1+L s p -Ξ1L s L m p -Ξ1L m Ξ1L s R 1+L s p Ξ1L m L m p L m p 0R 2+L r p 0Ξs L m 0Ξs L r R 2i m 1i t 1i m 2i t 2(1电机转子磁链与电流的关系为L m i m 1+L r i m 2=Ω2(2L m i t 1+L r i t 2=0(3将(2代入(1中第3行中,得:i m 2=-p Ω2R 2(4再代入(2解出i m 1:i m 1=-T 2p +1L m Ω2或得:Ω2=L m T 2p +1i m 1(5由式(1第4行可得:i t 2=-L m L r i t 1(6而由式(3第4行Ξs =-R 2Ω2i 2(7可将(6代入(7,并考虑到T 2=L r R 2,则Ξs =-L m i t 1T 2Ω2(8电机的电磁转矩公式为:T e =Mp L m L r i t 1Ω2(9电机运动方程为:T e -T l =J N pd Ξ d t (10其中,R 1,R 2为定转子电阻;T 2为转子励磁时间常数,T 2=L r R 2;L m 为定转子等效绕组间15第2期杨洋等:基于M A TLAB S I M UL I N K 的异步电机矢量控制调速系统仿真的互感,L m =(3 2L m 1;U m 1,U m 2为M T 轴坐标系中M 、T 轴定子电压;L s 为定子等效绕组的自感,L s =L m +L 11;i m 1,i t 1,i m 2,i t 2为M T 轴坐标系中M 、T 轴定向转子电流;L r 为转子等效绕组的自感,L r =L m +L 11;T e 电磁转矩;Ξ1为定子转速;N p 为极对数;Ξs 为转差;J 为转动惯量;Ξ为转子转速;Ω2为转子总磁链Ζ由上述式子可知,由于M T 坐标按转子磁场定向,在定子电流的两个分量之间实现了解耦,i m 1唯一决定磁链Ω2,当磁通不变时,i t 1则只影响转矩,与直流电机中的励磁电流和电枢电流相对应Ζ式(5,(8,(9,(10就是矢量控制的基本数学模型Ζ根据这些推导的式子,可以画出异步电机变压变频矢量控制系统结构图(图1Ζ图1中异步电机矢量变换数学模型如图2Ζ图2的模型中除根据(5,(9式绘得分解成磁通和转速的直流电机模型外,由转子频率和转差频率相加,得到定子频率信号,再经积分,即获得转子磁链的相位信号5,这是坐标变换所不可缺的参数Ζ如果将式(1展开,并代入式(2,(3,我们可以写出异步电机按转子磁场定向情况下的状态变量方程X α=A (Ξ1X +B U(11式中X =i m1i t 1Ω2,A (Ξ=ZΞ1L m R 2ΡL r -Ξ1-R 1L r ΡL m Ξ1ΡR 2L mL r 0-R 2L r ,B =L r Ρ00L r Ρ00,U =u m 1u t 1,Z =R 1L 2r +R 2L 2m ΡL r ,Ρ=L s L r -L 2m 从状态方程可以看出这是一个线性时变系统,虽然S I M UL I N K 中提供有状态方程模块,但主要是针对定常系统的,所以在S I M ULI N K 中用状态方程仿真电机系统较为不便Λ如希望用状态方程仿真,可直接在M A TLAB 中用M 文件编程建立仿真系统,只不过系统模型不如S I M UL I N K 所建的直观Λ本文主要的目的是在S I M UL I N K 下建立仿真模型,图1和图2的模型,可毫不费力地利用S I M UL I N K 提供的库模块来构建,这是后一节的重点Λ图1异步电机变压变频矢量控制系统结构图A 7R 为磁通调节器,A SR 为转速调节器25湖南大学学报(自然科学版2000年图2异步电机矢量变换数学模型2异步电机矢量控制系统的SI M UL I NK 仿真模型图1中,包含了坐标转换模块(2r 3s block ,电流控制型变频器模块(CSI block ,以及异步电机矢量变换模型(I nducti on m otor block ,这些模块可以由SI M UL I NK调用库模型分别建立,然后封装成Subsyste m Λ这里的坐标变换(2 3和图2中的坐标转换(3 2互为反变换Λ而电流控制型P WM 变压变频器的模型在M AT LAB 5.2中的POW ERS Y S 库中可以找到Λ这三个主要模块构造好后,其它环节也一样可以通过SI M UL I NK 模块库调入,输入不同参数,然后如图3连接,整个仿真模型就建好了Λ图中异步电机矢量变换模块展开内部结构如图4Λ系统中还包括两个P I 调节器,对应于图1中A 7R ,ASR ,这两个调节器也是定制好Subsyste m 后再封装而成Λ图3异步电机矢量控制变压变频调速SI M U L I NK 仿真模型3仿真实验35第2期杨洋等:基于M A TLAB S I M UL I N K 的异步电机矢量控制调速系统仿真图4异步电机矢量变换仿真模块(1仿真实验1转速输入设定为一阶跃函数,初值为100rad s (角频率,1s 后跃变为300rad s Λ磁通设为一定值1.1,由电流型逆变器给电机供电,让电机空载启动运行,仿真获得的转速、电磁转矩仿真曲线如图5,图6Λ图5电机输出速度仿真曲线图6电磁转矩仿真曲线(2仿真实验输入设定转速(角速度不变,300rad s ,磁通输入仍为1.1,电机空载启动,1s 后加入额定负载T L ,经SI M UL I NK 仿真模型仿真后得出的速度、电磁转矩曲线如图7,图8Λ图7电机输入速度仿真曲线图8电机电磁转矩变化曲线45湖南大学学报(自然科学版2000年项目: 科技支撑计划课题(2021BAG12A05-08定稿日期:2021-06-28作者简介:倪强(1987-,男,湖南益阳人,硕士研究生,研究方向为电力牵引交流传动及其控制技术。
基于Matlab/Simulink 的交流异步电机矢量控制系统张文哲1,2(1.上海理工大学上海200093;2.德国科堡应用科技大学巴伐利亚州科堡96450)摘要:着眼于讨论交流异步电机的矢量控制方法,在了解以及分析了交流异步电机的数学模型和调频控制原理的基础上,设计了一种电机的矢量控制方法以及建立模型并进行仿真。
利用Matlab/Simulink 的强大建模仿真功能,设计了各个功能模块,如:ACR 模块、ASR 模块,PI 调节模块、坐标转换模块、磁通计算模块等。
并且整合这些独立的模块成为一个矢量控制调速系统。
仿真实验结果证明了该模型设计的合理性有效性。
实验图表数据表明该建模方法能达到准确控制调速系统的要求。
关键词:交流异步电机;Matlab ;矢量控制;建模仿真中图分类号:TN7文献标识码:A文章编号:1674-6236(2014)15-0165-03AC asynchronous motor vector control system based on Matlab/SimulinkZHANG Wen 鄄zhe 1,2(1.University of Shanghai for Science and Technology ,Shanghai 200093,China ;2.Hochschule Coburg ,Coburg 96450,Germany )Abstract:This short essay come up with a modeling method about vector control system of AC asynchronous motor based on mathematical model of AC motor.Designed simulation model is made up by many independent function module ,like:ACR module ,ASR module ,PI regulator module ,Coordinate transformation module ,Magnetic flux calculation module and so on.The simulation experiment make clear that this model ’s method is accurate ,easy to realize and use.This model provide a checking method and research means for popularizing vector control system used in industry field.Key words:AC asynchronous motor ;Matlab ;vector control ;modeling and simulation收稿日期:2013-09-13稿件编号:201309097作者简介:张文哲(1989—),男,浙江德清人,硕士。
基于Matlab/Simulink异步电机矢量控制系统仿真1、Matlab仿真程序及各仿真系统工作原理首先,读懂本文献并结合相关参考文献,分析异步电机矢量控制系统机构原理。
1.1矢量控制系统分析矢量控制系统的基本思路是以产生相同的旋转磁动势为准则,将异步电动机在静止三相坐标系上的定子交流电流通过坐标变换等效成同步旋转坐标系上的直流电流,并分别加以控制,从而实现磁通和转矩的解耦控制,以达到直流电机的控制效果。
所谓矢量控制,就是通过矢量变换和按转子磁链定向,得到等效直流电动机模型,在按转子磁链定向坐标系中,用直流电动机的方法控制电磁转矩与磁链,然后将转子磁链定向坐标系中的控制量经变换得到三相坐标系的对应量,以实施控制。
其中等效的直流电动机模型如图1所示,在三相坐标系上的定子交流电流i A、i B、i C,通过3/2变换可以等效成两相静止正交坐标系上的交流i sα和i sβ,再通过与转子磁链同步的旋转变换,可以等效成同步旋转正交坐标系上的直流电流i sm和i st。
图1矢量控制系统原理结构图其次,原理分析清楚后,利用Matlab/Simulink强大的仿真能力,建立交流异步电机控制系统的仿真模型。
由于老师所给文献篇幅有限,学生又查阅了相关文献,结合其他相关文献,将控制系统分为几个功能模块:转速调节模块、定子电流励磁分量模块、定子电流转矩分量调节模块和坐标变换模块等,将这些模块有机组合,就可在Matlab/Simulink中搭建出交流异步电机系统的仿真模型。
1.2转速(ASR)调节模型图2 转速控制模型1.3磁链(APsirR、ACMR)控制模型图3 磁链控制模型1.4转矩计算(ACTR)模型图4 转矩控制模型1.5坐标变换(2s/2r、2r/2s)模型图5 坐标变换模块模型1.6整体模型图6 整体模型2、仿真结果及分析由于学生能力有限,在按照相关文献上的程序编写后,大致模块已经建立出来,但是,在电机建模上不太清楚,不能完整的运行程序,故无法来改变参数来进行完整的仿真,希望老师能够谅解。
MatlabSimulink中异步电机模型说明⽂档DescriptionThe Asynchronous Machine block operates in either generator or motor mode. The mode of operation is dictated by the sign of the mechanical torque:Mechanical Systems lsPreset modelProvides a set of predetermined electrical and mechanical parameters for various asynchronous machine ratings of power (HP),phase-to-phase voltage (V), frequency (Hz), and rated speed (rpm).Select one of the preset models to load the corresponding electrical and mechanical parameters in the entries of the dialog box. Note that the preset models do not include predetermined saturation parameters. Select No if you do not want to use a preset model, or if you want to modify some of the parameters of a preset model, as described below.When you select a preset model, the electrical and mechanical parameters in the Parameters tab of the dialog box become unmodifiable (grayed out). To start from a given preset model and then modify machine parameters, you have to do the following: Select the desired preset model to initialize the parameters.1.2.Change the Preset model parameter value to No. This will not change the machine parameters. By doing so, you just break theconnection with the particular preset model.3.Modify the machine parameters as you wish, then click Apply.Mechanical inputAllows you to select either the torque applied to the shaft or the rotor speed as the Simulink signal applied to the block's input.Select Torque Tm to specify a torque input, in N.m or in pu, and change labeling of the block's input to Tm. The machine speed is determined by the machine Inertia J (or inertia constant H for the pu machine) and by the difference between the applied mechanical torque Tm and the internal electromagnetic torque Te. The sign convention for the mechanical torque is the following: when the speed is positive,a positive torque signal indicates motor mode and a negative signal indicates generator mode.Select Speed w to specify a speed input, in rad/s or in pu, and change labeling of the block's input to w. The machine speed is imposed and the mechanical part of the model (Inertia J) is ignored. Using the speed as the mechanical input allows modeling a mechanicalcoupling between two machines and interfacing with SimMechanics? and SimDriveline? models.The next figure indicates how to model a stiff shaft interconnection in a motor-generator set when friction torque is ignored in machine 2.The speed output of machine 1 (motor) is connected to the speed input of machine 2 (generator), while machine 2 electromagnetic torque output Te is applied to the mechanical torque input Tm of machine 1. The Kw factor takes into account speed units of both machines (pu or rad/s) and gear box ratio w2/w1. The KT factor takes into account torque units of both machines (pu or N.m) and machine ratings. Also, asthe inertia J2 is ignored in machine 2, J2 referred to machine 1 speed must be added to machine 1 inertia J1.In the preceding equations, Θ is the angular position of the reference frame, while is the difference between the position of the reference frame and the position (electrical) of the rotor. Because the machine windings are connected in a three-wire Y configuration, The following table shows the values taken by Θ andframe).Specifies the units of the electrical and mechanical parameters of the model. This parameter is not modifiable; it is provided for information purposes only.Parameters TabNominal power, voltage (line-line), and frequencyThe nominal apparent power Pn (VA), RMS line-to-line voltage Vn (V), and frequency fn (Hz).Stator resistance and inductanceThe stator resistance Rs (Ω or pu) and leakage inductance Lls (H or pu).Rotor resistance and inductanceThe rotor resistance Rr' (Ω or pu) and leakage inductance Llr' (H or pu), both referred to the stator.Mutual inductanceThe magnetizing inductance Lm (H or pu).Inertia constant, friction factor, and pole pairs For the SI units dialog box: the combined machine and load inertia coefficient J (kg.m ), combined viscous friction coefficient F (N.m.s),and pole pairs p. The friction torque Tf is proportional to the rotor speed ω (Tf = F.w).For the pu units dialog box: the inertia constant H (s), combined viscous friction coefficient F (pu), and pole pairs p.Initial conditionsSpecifies the initial slip s, electrical angle Θe (degrees), stator current magnitude (A or pu), and phase angles (degrees):[slip, th, i , i , i , phase , phase , phase ]For the wound-rotor machine, you can also specify optional initial values for the rotor current magnitude (A or pu), and phase angles (degrees):[slip, th, i , i , i , phase , phase , phase , i , i , i ,phase , phase , phase ]For the squirrel cage machine, the initial conditions can be computed by the load flow utility in the Powergui block.Simulate saturationSpecifies whether magnetic saturation of rotor and stator iron is simulated or not.Saturation parametersSpecifies the no-load saturation curve parameters. Magnetic saturation of stator and rotor iron (saturation of the mutual flux) is modeled bya nonlinear function (in this case a polynomial) using points of the no-load saturation curve. You must enter a 2-by-n matrix, where n is the number of points taken from the saturation curve. The first row of this matrix contains the values of stator currents, while the second row contains values of corresponding terminal voltages (stator voltages). The first point (first column of the matrix) must correspond to the point where the effect of saturation begins.2as bs cs as bs cs as bs cs as bs cs ar br cr ar br crSample time (-1 for inherited)Specifies the sample time used by the block. To inherit the sample time specified in the Powergui block, set this parameter to Inputs and Outputs TmThe Simulink input of the block is the mechanical torque at the machine's shaft. When the input is a positive Simulink signal, theconnected in series.When you use Asynchronous Machine blocks in discrete systems, you might have to use a small parasitic resistive load, connected at the machine terminals, in order to avoid numerical oscillations. Large sample times require larger loads. The minimum resistive load is proportional to the sample time. As a rule of thumb, remember that with a 25 µs time step on a 60 Hz system, the minimum load isThe 3 HP machine is connected to a constant load of nominal value (11.9 N.m). It is started and reaches the set point speed of 1.0 pu at t = 0.9 second.The parameters of the machine are those found in the SI Units dialog box above, except for the stator leakage inductance, which is set to twice its normal value. This is done to simulate a smoothing inductor placed between the inverter and the machine. Also, the stationary reference frame was used to obtain the results shown.Open the power_pwm demo. Note in the simulation parameters that a small relative tolerance is required because of the high switching rate of the inverter.Run the simulation and observe the machine's speed and torque.The first graph shows the machine's speed going from 0 to 1725 rpm (1.0 pu). The second graph shows the electromagnetic torque developed by the machine. Because the stator is fed by a PWM inverter, a noisy torque is observed.However, this noise is not visible in the speed because it is filtered out by the machine's inertia, but it can also be seen in the stator and rotor currents, which are observed next.the last moments of the simulation.Example 2: Effect of Saturation of the Asynchronous Machine BlockThe power_asm_sat demo illustrates the effect of saturation of the Asynchronous Machine block.Two identical three-phase motors (50 HP, 460 V, 1800 rpm) are simulated with and without saturation, to observe the saturation effects on the stator currents. Two different simulations are realized in the demo.The first simulation, is the no-load steady-state test. The table below contains the values of the Saturation Parameters obtained by simulating different operating points on the saturated motor (no-load and in steady-state).Saturation Parameters MeasurementsRunning the simulation with a blocked rotor or with many different values of load torque will allow the observation of other effects of saturation on the stator currents.References[1] Krause, P.C., O. Wasynczuk, and S.D. Sudhoff, Analysis of Electric Machinery, IEEE Press, 2002.[2] Mohan, N., T.M. Undeland, and W.P. Robbins, Power Electronics: Converters, Applications, and Design, John Wiley & Sons, Inc., New York, 1995, Section8.4.1.See AlsoPowerguiWas this topic helpful?Yes No1984-2010 The MathWorks, Inc. Terms of UsePatentsTrademarksAcknowledgments。
机电动力系统分析与仿真作业题目一、一台三相异步电动机,13kW,380V, 5.4A,50Hz,960r/min N N N N N P U I f n =====,定子Y 接,20.306H,0.310H,0.296H, 2.08, 1.525,0.25kg.m s r m s r L L L r r J ====Ω=Ω=(含轴系)。
试针对不同负载工况Ⅰ:理想空载(0L T =)Ⅱ: 恒定负载(0.5L N T T =)和不同电流控制模式Ⅰ:定子电流自由变化(不限幅)Ⅱ:定子电流限幅控制,*1max3I ≤ 分别考察以下三种起动方案Ⅰ:直接起动,普通交流电源供电(正弦波,恒幅恒频)Ⅱ:变频起动,理想VVVF 电源供电(正弦波,调幅调频)* 设频率变化规律为**1111n n f f k t -=+∆(*1max 11,n f k ≤为斜率,自定)且电压与频率关系为()**12211n U k k f =+-(2k 为补偿电压,亦自定) Ⅲ:变频起动,SPWM 逆变器供电(DC-AC ,脉宽调制波,调幅调频)* 建议载波频率>=1000Hz,调制频率及基波电压变化规律方案Ⅱ* 建议进而尝试转子恒磁链矢量控制方案的机电动态过程(组合=工况2⊕模式2⊕方案3+≥12)。
要求给出仿真分析模型,图示并讨论仿真结果,综述结论与体会。
二、结合一篇介绍机电控制系统仿真研究结果的论文(建议优先选择国外知名期刊最新发表的文章),尝试:①重复仿真过程,再现仿真结果。
②对模型、算法、结果和结论进行综合评述。
答:一、三相异步电动机实验及探讨其13种情况1.建立电机的数学模型为了消除分析过程中出现的电感矩阵的时变因素,简化电机的分析。
首先,我们需要建立绕线式异步电机矢量控制变速恒频发电系统的分析模型。
选定同步速参照系,并假定定子侧正方向服从发电机惯例,转子侧服从电动机惯例。
假定电机气隙均匀,定转子三相对称。
1.1 参照系理论(坐标变换)三相静止参照系(a-b-c )和任意速旋转参照系(d-q-n)之间的关系如图1所示。
异步电动机矢量控制系统的仿真研究摘要:本文根据异步电动机矢量控制的基本原理,基于Matlab 软件构造了按转子磁场定向的矢量控制系统的仿真模型。
通过仿真试验验证了模型的正确性,结果表明所建立的调速系统具有良好的动态性能,实现了系统的解耦控制。
关键词:异步电动机矢量控制Matlab 仿真Simulation of Vector Control System for Asynchronous MotorAbstract:According to the basic principles of induction motor vector control,this paper constructssimulation model of rotor magnetic field oriented vector control system based on the MATLAB software.It verifies the accuracy of the model by simulation. Results show that it has good dynamic performance,andit realizes the decoupling control system.Key words: asynchronous-motor; vector control; matlab simulation0 引言异步电动机具有非线性、强耦合、多变量的性质,要获得良好的调速性能,必须从其动态模型出发,分析异步电动机的转矩和磁链控制规律,研究高性能异步电动机的调速方案。
矢量控制就是基于动态模型的高性能的交流电动机调速系统的控制方案之一。
所谓矢量控制,就是通过矢量变换和按转子磁链定向,得到等效直流电动机模型,在按转子磁链定向坐标系中,用直流电动机的方法控制电磁转矩与磁链,然后将转子磁链定向坐标系中的控制量经变换得到三相坐标系的对应量,以实施控制。
1异步电动机矢量控制原理及基本方程式1.1基本公式矢量控制系统的基本思路是以产生相同的旋转磁动势为准则,将异步电动机在静止三相坐标系上的定子交流电流通过坐标变换等效成同步旋转坐标系上的直流电流,并分别加以控制,从而实现磁通和转矩的解耦控制,以达到直流电机的控制效果。
异步电动机在两相同步旋转坐标系上的数学模型包括电压方程、磁链方程和电磁转矩方程。
分别如下:⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+-+-+--+=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡rqrdsqsdrrrsmmsrsrrmmmmsssmmsssrqrdsqsdiiiiPLRLPLLLPLRLPLPLLPLRLLPLLPLRuuuuωωωωωωωω11111(1)⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡rqrdsqsdrmrmmsmsrqrdsqsdiiiiLLLLLLLLψψψψ(2))(rqsdrdsqmpeiiiiLnT-=(3)当两相同步旋转坐标系按转子磁链定向时,应有r rd ψψ=,0=rq ψ即得:r sq rmpe i L L n T ψ= (4) r mr sdL PT i ψ+=1 (5)sd r mr i PT L +=1ψ (6)sq rr ms i T L ψω=(7) 式中: 1ω为同步转速;ω为转子转速;s ω为转差角速度; u 为电压;ψ为磁链;i 为电流;R 电阻;L 为电感;p n 为极对数;r T 为转子时间常数;dtdP =为微分因子。
s 表示定子;r 表示转子;d 表示d 轴;q 表示q 轴;m 表示同轴定、转子间的互感。
1.2解耦问题为了使两个子系统完全解耦,除了坐标变换以外,还应设法消除或抑制转子磁链pr 对电磁转矩Te 的影响。
把ASR 的输出信号除以r ψ,当控制器的坐标反变换与电机中的坐标变换对消,且变频器的滞后作用可以忽略时,此处的两个子系统就完全解耦了。
这时,带除法环节的矢量控制系统可以看成是两个独立的线性子系统。
其结构图如图1:图1.解耦矢量控制系统2仿真模型2.1 空间矢量的坐标变换矢量变换是简化交流电动机复杂模型的重要数学方法,是交流电动机矢量控制的基础。
矢量变换包括三相静止坐标系和两相静止坐标系的变换,两相静止坐标系和两相旋转坐标系的变换,以及直角坐标和极坐标的变换等。
2.1.1 三相静止坐标系和两相静止坐标系的变换(简称3s/2s 变换)在交流电动机中三相对称绕组通以三相对称电流可以在电动机气隙中产生空间旋转的磁场,在功率不变的条件下,按磁动势相等的原则,三相对称绕组产生的空间旋转磁场可以用两相对称绕组来等效,三相静止坐标系和两相静止坐标系的变换则建立了磁动势不变情况下,三相绕组和两相绕组电压、电流和磁动势之间的关系。
设为两相对称绕组的电流,为三相对称绕组的电流,它们之间的变换关系为:⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡---=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡c B A C B A i i i C i i i i i i 230212121232302121132βα(8) (1)式中,是便于逆变换而增加的一相零序分量。
C3/2 为3s/2s 变换矩阵。
2.1.2 两相静止坐标系和两相旋转坐标系的变换(简称2s/2r 变换)两相静止绕组,通以两相平衡交流电流,产生旋转磁动势。
如果令两相绕组转起来,且旋转角速度等于合成磁动势的旋转角速度,则两相绕组通以直流电流就产生空间旋转磁动势。
从两相静止坐标系到两相旋转坐标系的变换,称为两相旋转-两相静止变换,简称C 变换。
其变换关系为:⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡-=⎥⎦⎤⎢⎣⎡q d s r q d i i C i i i i 22cos sin sin cos ϕϕϕϕβα(9) (9)式中,为d-q 坐标系d 轴与坐标系轴之间的夹角,是d-q 旋转坐标系的旋转角速度。
为两相旋转到两相静止坐标系的变换矩阵。
即⎥⎦⎤⎢⎣⎡-=ϕϕϕϕcos sin sin cos 22srC (10)对( 3 )式进行逆变换可以得到两相静止到两相旋转的变换矩阵为⎥⎦⎤⎢⎣⎡-==-ϕϕϕϕcos sin sin cos 12222sr rsC C (11) 2.1.3 三相静止坐标系和两相旋转坐标系的变换在得到三相静止坐标系到两相静止坐标系的变换和两相静止到两相旋转的变换矩阵后,也可以得到三相静止坐标系到两相任意旋转坐标系的变换⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡C B A r s C B A s s r s a r s a i i i C i i i C C i i i Ci i i 2323220220ββ (12)式中,三相静止坐标系到两相任意旋转坐标系的变换矩阵为⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+----+-212121)120(in )120(in sin )120cos()120cos(cos 32 ϕϕϕϕϕϕs s (13)相应的两相任意旋转坐标系到三相静止坐标系的变换矩阵为==-12332rs srC C⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡+-+----21)120(in )120cos(21)120(in )120cos(21sin cos 32 ϕϕϕϕϕϕs s (14)图2 C2r/3s 仿真模型2.2 建立dq 坐标系下,电机模型dq 坐标系下,可得异步电机的基本公式:)(rq sd rd sq pi i LrLmn Te ψψ-=(15) dtdw n J T Te rp L =- (16)ssc m r rds sc sd sd R s L s L L R s L U i +-+=1ψ(17) ssc m r rqssc sq sq R s L s L L R s L U i +-+=1ψ(18) )(1rq r r r m sd r r rd L w R L i sL R ψψ-+=(19))(1rd r r r m sq r r rq L w R L i sL R ψψ++=(20)由(15)~(20)可搭建如下电机模型:图3 异步电机仿真模型2.3 建立整个系统仿真模型图4 系统仿真模型3仿真参数及仿真结果3.1 仿真参数交流异步电机模型各个参数如下:Lsc=9.136,Rs=9.53,Lr=0.505,Lm=0.447,Rr=5.619,TL=2,np=2,J=0.0026 给定转速w=120—100,Flux=0.5 ACR中调节器各个参数为:Ki=10,Ti=0.1,限幅为-10~10。
3.2 仿真结果(1)wr仿真曲线(2)flux仿真曲线(3)Ia,Ib,Ic仿真曲线(4)Id,Iq仿真曲线(5)Te仿真曲线4结语通过以上仿真过程可以看出,采用MATLAB 环境下的SIMULINK仿真工具,可以快速地完成一个电动机控制系统的建模、仿真。
且无须编程,仿真直观、方便、灵活。
对于开发和研究交流传动系统有着十分重要的意义。
并为系统从设计到实现提供了一条捷径。
5参考文献[1]黄忠霖. 控制系统MA TLAB 计算及仿真[M] . 北京:国防工业出版社,2001[2] 陈伯时.电力拖动自动控制系统[M] . 北京: 机械工业出版社,1998[3]朝泽云,康勇,钟和清等. 异步电机矢量控制系统的建模与仿真[J]. 电机与控制应用. 2007,34 (3) : 11214.。