变位焊接机器人系统的运动建模及分析
- 格式:pdf
- 大小:289.74 KB
- 文档页数:4
机器人控制系统的设计与建模随着科技的进步,机器人已经逐渐成为了人类生活中不可或缺的一部分。
现代工业、医疗、军事等领域都广泛应用了机器人技术,而机器人控制系统的设计与建模也成为了机器人技术中不可或缺的一环。
机器人控制系统是指对机器人进行指令控制和监控的系统,其主要目的是使机器人能够按照预定的程序和逻辑完成指定的任务。
机器人控制系统还需要具备自主学习、自我适应等功能,以满足复杂多变的环境需求。
在机器人控制系统的设计与建模过程中,需要考虑以下几个方面:一、机器人的动力学模型机器人动力学模型是机器人控制系统的基础。
它描述了机器人的物理特性和运动规律,帮助控制系统实现对机器人的动作控制。
机器人的动力学模型主要包括关节角度、关节速度、关节加速度等参数,以及机器人的惯性矩阵、重心位置等物理参数的描述。
在这个模型上,可以采用基于PID控制器和神经网络控制器等算法对机器人进行控制和优化。
二、机器人感知模型机器人的感知模型是机器人控制系统另一个重要的组成部分。
机器人需要通过传感器获取周围环境信息,如光线、声音、温度、距离等等,并能够识别物体、人或其它机器人。
通过感知模型,机器人能够更好地理解周围环境,识别任务目标和危险障碍,并且根据这些信息来指导自己的行为。
常用的机器人传感器包括摄像头、激光雷达、超声波传感器等。
三、机器人的路径规划和运动控制机器人的路径规划和运动控制是机器人控制系统中的一个核心环节。
机器人需要能够自主规划出完成任务所需的路径,并能够实现高精度的运动控制,避免与障碍物的碰撞。
路径规划和运动控制的技术发展非常快,目前主流算法包括Dijkstra算法、A*算法、RRT算法等,这些算法可以实现机器人的高效、安全、精确的运动。
四、机器人控制系统软硬件结合机器人控制系统的设计和建模需要软硬件结合。
机器人采用的控制器、电机、执行器、传感器等硬件需要与控制系统的软件相互配合,才能达到良好的运行效果。
另外,在系统设计过程中,还需要进行系统的模拟和仿真,以确保系统的稳定性和可靠性。
机器人运动学建模技术的工作原理机器人运动学建模技术为机器人的运动控制提供了基础,它是机器人技术中的一个重要组成部分。
机器人运动学建模技术主要利用数学方法和计算机软件对机器人系统进行建模和分析,从而优化机器人的运动控制。
一、机器人运动学基础机器人运动学是研究机器人运动规律和控制的一门学科,它主要包括前向运动学和逆向运动学两部分。
前向运动学是指已知机器人各关节的角度或位置,求出机器人末端执行器的位置和姿态;逆向运动学是指已知机器人末端执行器的位置和姿态,求出各个关节的角度或位置。
机器人运动学基础理论是机器人运动学建模技术的基础。
二、机器人运动学建模方法机器人运动学建模方法主要有基于DH方法的运动链式模型、基于坐标变换的运动学模型、基于位移向量法的运动学模型等。
1. 基于DH方法的运动链式模型DH方法是一种对机器人进行建模的方法,它可以将机器人运动链建立起来,并对每个关节的运动方向、长度和角度进行描述。
采用DH方法将机器人建模,可以有效地简化机器人的运动学分析,为机器人控制系统的设计提供了便利。
DH方法的建模步骤主要包括:(1)确定机器人的坐标系,建立虚拟的世界坐标系和机器人坐标系。
(2)确定机器人各关节的运动轴线,按照DH表示法,规定机器人关节的自由度和约束等条件。
(3)建立机器人的运动链,确定机器人各个部分间的运动关系,并计算出相应的转移矩阵。
通过建立DH方法的运动链模型,可以对机器人进行运动学分析,从而实现机器人的优化运动控制和精确位置控制。
2. 基于坐标变换的运动学模型坐标变换方法是一种常用的机器人建模方法,它可以对机器人的运动轨迹和姿态进行描述,并规定了机器人坐标系的变换规律。
坐标变换方法将机器人建模为一系列坐标系的变换,通过坐标系的变换,可以精确地描述机器人的运动轨迹和姿态。
(1)确定机器人的起始坐标系和目标坐标系,这些坐标系对应机器人的关节和工具末端。
(2)对机器人的各个部分和运动轨迹进行坐标系的变换,得到机器人的运动关系和姿态变化。
本科毕业设计(论文)题目:工业机器人运动建模与位姿求解工业机器人运动建模与位姿求解Motion Modeling and Posture Solving of IndustrialRobots摘要随着我国的工业和重工业的迅速发展,对人员需求量也日益增加,这也给人们造成了一定的困扰,于是乎出现了能够减轻人们工作量甚至代替人们工作的机器人,我们也称其称为刚体的位姿。
本文涉及的主要问题山机器人运动的建模问题和位姿求解问题,对加强工业机器人的工作效率起到了一定的作用。
关键词:机器人技术;运动建模:位姿求解ABSTRACTWith the rapid development of industiy and heavy industry in our countiy the demand for personnel is increasing day by day, which also causes some distress to people, so there are robots that can reduce peopled workload and even replace people's work, which we also call industrial robots・With the popularization of industrial robots in various industries, more and more problems appear gradually, which hinders the development of people in the field of robots, and the problem of solving industrial robots has attracted more and more attention. The robot moves in a limited space, and its motion has a certain pose enor. Reducing the eiTor of the robot in the process of work is the center of this paper, the position of the rigid body reference point and the attitude of the rigid body are collectively refeiTed to as the position and posture of the rigid body. The main problems involved in tliis paper are the modeling of the robot motion and the solving of the pose problem, which plays a certain role in eiilianciiig the efficiency of the industrial robot.Key words: Robot teclmology; Motion modeling; Pose solving目录1绪论 (5)1.1课题背景及研究意义 (5)1.2国内外工业机器人研究现状 (5)1.2.1国内对工业机器人的发展及研究现状 (5)1.2.2国外对工业机器人的发展及研究现状 (6)1.3国内外工业机器人运动建模研究现状 (7)1.4本文的主要研究内容 (8)2多刚体运动学理论基础 (10)2.1概述 (10)2.2多刚体系统运动学描述及应用 (10)2.3多刚体系统动力学建模与求解方法 (10)2.3.1多刚体系统动力学建模理论 (10)2.3.2多刚体系统动力学求解方法 (11)2.4本章小结 (12)3工业机器人运动建模 (14)3.1概述 (14)3.2工业机器人的空间运动和建模 (14)3.2.1机器人多维空间的运动和理论 (14)3.2.2工业机器人的建模方法 (14)3.3现代机器人运动建模分析 (17)3.4本章小结 (18)4工业机器人位姿求解 (19)4.1概述 (19)4.2齐次坐标及其变换理论 (19)4.3齐次坐标及其变换求解位姿 (20)4.4本章小结 (22)5全文总结与展望 (23)5.1全文总结 (23)5.2研究展望 (23)参考文献 (25)致谢 (28)1绪论1.1课题背景及研究意义随着机器人的逐渐发展和日渐成熟,工业机器人逐渐加入到人们日常生活和生产中去,机器人也逐渐融入我们的生活,并不只是局限于工业生产中,机器人也给我们的生活带来了许多便利。
工业机器人运动学建模随着科技的不断发展,工业机器人已经成为了工业制造业中不可或缺的一部分。
工业机器人是一种用于执行重复工作,处理危险或者需要高精度的工业任务的机器设备。
它们通常被用于生产、装配、材料输送、品质检查和测试等。
由于工业机器人具有高效性、精准度、可靠性等优点,因此它们已被广泛应用。
为了正确指导和控制工业机器人的运动,必须先对它们的运动学建模进行深入的研究。
运动学建模是描述机器人运动的数学模型,它是工业机器人系统工程的基础。
本文将介绍工业机器人运动学建模,以及相关的数学模型和计算方法。
1. 工业机器人运动学模型工业机器人可以分为多个自由度,每个自由度可以描述机器人位姿中的一种运动。
位姿是描述物体在三维空间中的位置和方向的量。
通常的自由度分类有以下三种:旋转自由度:机器人可以绕着某个轴旋转。
平移自由度:机器人可以沿着某个轴平移。
绕某点移动:机器人可以绕着某个点旋转和平移。
尽管存在不同类型的工业机器人,但绝大部分机器人的运动学模型都可以简化为一个连续的链式体系结构,每个关节提供一定的自由度。
根据这个链式体系结构,可以建立机器人的运动学模型。
工业机器人的运动学模型描述了机器人末端执行器的位置和方向。
末端执行器是机器人的工具,可以被看作是机器人控制的重点。
通过运动学模型,可以计算末端执行器在三维空间中的位置坐标和姿态(即机器人的位姿),以及机器人个关节的角度。
这样,就可以为机器人的控制提供重要的基础。
在运动学模型中,角度和位移量通常用关节角度变量表示。
2. 度量单位为了描述机器人的运动学模型,需要使用一些特殊的度量单位。
在这里,我们将介绍一些描述机器人位姿和运动学模型的常用单位。
角度(Angle):以度(°)和弧度(rad)作为两个常用的角度单位。
机器人操作通常使用弧度来度量角度。
距离(distance):通常以米(m)为测量单位。
其他可能使用的度量单位有:毫米(mm)、微米(um)和纳米(nm)等等。
2020年第们期Design and Research设计与研究焊接机器人轨迹规划与运动仿真方法冯树先①刘益剑① 夏慧强①刘宗熙②杨继全②谢 非②(①南京师范大学电气与自动化工程学院,江苏南京210023;②江苏省三维打印装备与制造重点实验室,江苏南京210023)摘 要:为研究6R 机器人AEB IRB140的轨迹规划,根据改进的D-H 法对机器人各连杆建系并进行正运动学分析,推导出末端执行器相对于基坐标系的位姿,利用解析法对机器人进行逆运动学求解。
通过五次多项式插值进行机器人轨迹规划,结合MATLAB-Robotics toolbox 构建机器人三维数学模型,实现对机器人的轨迹规划仿真。
仿真得到了机器人连续平滑的关节轨迹和末端轨迹曲线,验证了运动学模型的正确性和合理性,为机器人运动分析、动力学控制和规划提供了理论依据和研究 基础。
关键词:ABB IRB140机器人;运动学;轨迹规划;仿真;MATLAB中图分类号:TP273 文献标识码:ADOI : 10.19287/j. cnki. 1005-2402.2020.11. 012Trajectory planning and motion simulation of welding robotFENG Shuxian ①,LIU Yijian ①,XIA Huiqiang®, LIU Zongxi ②,YANG Jiquan ②,XIE Fei ② (①School of Electrical and Automation Engineering , Nanjing Normal University , Nanjing 210023, CHN ;②Jiangsu Key Laboratory of 3D Printing Equipment and Manufacturing , Nanjing 210023,CHN)Abstract : For the purpose of making trajectory plan on 6R robot ABB IRB140, improved form of Denav 让一Harten-berg notation was utilized to establish link coordinates and perform forward kinematic analysis , deriving the pose of the end eflector relative to the base coordinates , and the inverse kinematic is solved by theanalytical method. The trajectory planning and analysis of the robot was carried out according to the quin tic polynomial interpolation , and the three -dimensional mathematical model of the robot is constructed by using Matlab - R obotics toolbox to realize the simulation of the robot trajectory planning. The results ob tained continuous and smooth joint trajectory and terminal trajectory curve , which verified the correctness and rationality of the kinematics model. It provides theoretical basis and research foundation for robot mo tion analysis , dynamic control and planning.Keywords : ABB IRB140 robot ; kinematics ; trajectory planning ; simulation ; MATLAB 随着现代工业技术的迅猛发展,工业机器人已经 成为“工业4.0”战略发展的重中之重,在智能制造众多领域里获得了广泛的应用和发展。
机械手臂的运动学建模与动力学分析机械手臂作为一种重要的工业自动化设备,广泛应用于生产线、装配线等生产领域。
为了能够更好地设计和控制机械手臂,需要对其进行运动学建模与动力学分析。
运动学建模是研究机械手臂运动规律的过程。
运动学建模的首要任务是确定机械手臂的位姿,即确定其末端执行器在空间中的位置和姿态。
为了达到这个目标,需要使用坐标变换技术来描述机械手臂各个关节之间的关系。
在运动学建模中,最常用的方法是DH参数法。
DH参数法基于Denavit-Hartenberg坐标系,通过定义坐标系的原点、方向和旋转轴,建立了机械手臂各个关节之间的连接关系。
通过求解正运动学方程,可以得到机械手臂的位姿。
除了正运动学方程,逆运动学方程也是运动学建模的重要内容。
逆运动学方程可以实现根据末端执行器的位姿来计算机械手臂关节的角度。
逆运动学方程的求解可以采用解析法或者数值法。
解析法通过将几何关系和三角函数运算相结合,得到解析解。
数值法则通过迭代计算来逼近解。
动力学分析是研究机械手臂运动过程中受力和力矩的变化规律的过程。
动力学分析的目标是确定机械手臂的运动学参数和负载情况下的动力学参数,如速度、加速度、力和力矩等。
在动力学分析中,可以利用拉格朗日方程来描述机械手臂的动力学模型。
拉格朗日方程是一种基于能量原理的力学方程,通过对机械手臂系统的动能和势能进行建模,可以得到描述机械手臂运动的运动方程。
为了求解运动方程,需要对机械手臂进行系统建模和参数估计。
系统建模是将机械手臂进行数学描述的过程,使用质量、长度、转动惯量等参数来表示机械手臂的物理特性。
参数估计是通过实验或者仿真来获取机械手臂的动力学参数。
通过运动学建模与动力学分析,可以实现对机械手臂的控制和优化。
通过运动学建模,可以根据末端执行器的位姿来计算关节的角度,从而实现机械手臂的轨迹规划和运动控制。
通过动力学分析,可以了解机械手臂在不同工况下的受力情况,为机械手臂的设计和控制提供参考。
2014年第12期47焊接机器人是从事焊接(包括切割与喷涂)的工业机器人。
根据国际标准化组织(ISO)工业机器人术语标准焊接机器人的定义,工业机器人是一种多用途的、可重复编程的自动控制操作机(Manipulator),具有三个或更多可编程的轴,具有生产效率高且产品品质稳定,劳动力成本低廉,操作环境好等优点,主要用于工业自动化领域。
随着社会的发展,我国已经出现了人口老龄化,劳动力成本不断上升。
随着国内外机械行业竞争的不断加剧,对产品的质量要求更严格,焊接方式也急需由传统的手工焊接逐渐由传统的人工焊接转变向机器人焊接。
国外厂商如FANUC、OTC、ABB和KUKA等对焊接机器人的研究较早,已经形成了系列化产品并投放占领大部分的国内外市场份额。
国内在近几年才开始进行机器人技术的研究,起步较晚,机器人的性能和技术都和国外厂商有一定的差距。
因此,国内市场也需要在借鉴国外同类型焊接机器人优点的基础上,立足于现有的加工制造业水平,从解决实际问题的角度出发,研究开发出满足中小企业实际需要的经济型可靠型焊接机器人。
SOLIDWORKS2014是由美国SOLIDWORKS公司研究开发的基于造型的三维机械设计软件,其特点是易学易用,在企业内部推广成本低,SOLIDWORKS Motion是嵌在SOLIDWORKS中的运动仿真模块,依托其强大的运动分析功能,能比较精确地对焊接机器人进行工件运动位置及运动参数的计算,并以动画的形式计算出虚拟现实的动画演示,能很直观地解决六自由度焊接机器人的运动规律问题。
通过建立虚拟仿真环境进行机器人的仿真实验研究,可以大幅度降低实验成本,提高实验效率,在运动状态下进行运动仿真,能有效地检查机器人本体结构设计的合理性等,对实际样机的设计具有重要的参考和指导价值。
一、机器人本体结构设计1.机器人设计参数根据各种工况,焊接机器人可设定不同的运行程序,在工作状态中兼备高速动态响应和良好的低速稳定性的优点,在控制性能方面可以实现连续轨迹控制和点位控制。
焊接机器人运动分析摘 要:针对puma250焊接机器人,分析了它的正运动学、逆运动学的问题。
采用D-H坐标系对机器人puma250 建立6个关节的坐标系并获取 D-H 参数,并对其运动建立数学模型用MATLAB编程,同时仿真正运动学、逆运动学求解和轨迹规划利用pro-e对puma250建模三维模型。
关键词:puma250焊接机器人;正逆解;pro-e;Matlab;仿真1、 建立机器手三维图Puma250机器人,具有6各自由度,即6个关节,其构成示意图如图 1。
各连杆包括腰部、两个臀部、腕部和手抓。
设腰部为1连杆,两个臀部分别为2、3连杆,腰部为4连杆,手抓为5、6连杆,基座不包含在连杆范围之内,但看作0连杆 ,其中关节2、3、4使机械手工作空间可达空间成为灵活空间。
1关节连接1连杆与基座0,2关节连接2连杆与1连杆,3关节连接3连杆与2连按,4关节连接4连杆与3连杆,5关节连接5连杆与4连杆。
各连杆坐标系如图 2 所示。
图1 puma250 机器人2、 建立连杆直角坐标系。
3、 根据坐标系确定D-H表。
D-H 参数表连杆iθi di aiɑi190°0002000-90°304804-90°08-90°5-90°00-90°6020-90°4、 利用MATLAB 编程求机械手仿真图。
>>L1=Link([pi/2 0 0 0 0],'standard');L2=Link([0 0 0 -pi/2 0],'standard');L3=Link([0 -4 8 0 0],'standard');L4=Link([-pi/2 0 8 0 0],'standard');L5=Link([-pi/2 0 0 -pi/2 0],'standard');L6=Link([0 2 0 -pi/2 0],'standard');bot=SerialLink([L1 L2 L3 L4 L5 L6],'name','ROBOT');bot.plot([0 0 0 0 0 0])t=[0:0.01:1];q1=[0 0 0 0 0 0];q2=[-pi/4 0 pi/4 0 -pi/4 0];[q,qd,qdd]=jtraj(q1,q2,t);plot(bot,q)%机器人由q1状态旋转到q2状态>>subplot(2,2,1);plot(t,q(:,2));subplot(2,2,2);plot(t,qd(:,2));subplot(2,2,3);plot(t,qdd(:,2)) %q1到q2状态位移、速度、加速度5、 求正逆向运动学。
![7.2 带变位机的机器人系统[30页]](https://uimg.taocdn.com/a35a64fba6c30c2258019e47.webp)
机器人的运动学和动力学模型是什么机器人的运动学和动力学模型是为了描述机器人运动和力学特性而建立的数学模型。
运动学模型描述机器人的位姿、速度和加速度,而动力学模型则描述机器人的力、力矩和力的影响。
本文将详细介绍机器人的运动学和动力学模型,包括其定义、应用和建模方法。
一、运动学模型1. 定义机器人的运动学模型用于描述机器人的位姿、速度和加速度之间的关系。
位姿是机器人在三维空间中的位置和方向,速度是机器人在时间上的位置变化率,加速度是速度的变化率。
运动学模型可以帮助我们理解机器人的运动规律,例如机器人的轨迹、路径和姿态等。
2. 应用运动学模型在机器人领域有广泛的应用。
首先,它可以用于路径规划和轨迹跟踪。
通过建立机器人的运动学模型,我们可以预测机器人在不同环境下的运动轨迹,从而实现有效的路径规划和轨迹跟踪。
其次,运动学模型可以用于机器人的姿态控制。
通过了解机器人的位姿、速度和加速度之间的关系,我们可以设计控制算法,实现机器人在不同姿态下的运动控制。
此外,运动学模型还可以用于机器人的碰撞检测和避障。
通过分析机器人的运动学特性,我们可以预测机器人的碰撞风险,并采取相应的避障策略。
3. 建模方法机器人的运动学模型可以通过几何方法、代数方法和向量方法进行建模。
几何方法是最常用的建模方法之一。
它通过描述机器人的几何特征和运动规律来建立运动学模型。
例如,可以使用笛卡尔坐标系和欧拉角来描述机器人的位姿,使用导数和积分来描述机器人的速度和加速度。
代数方法是另一种常用的建模方法。
它通过代数方程和矩阵运算来描述机器人的位姿、速度和加速度之间的关系。
例如,可以使用坐标变换和雅可比矩阵来描述机器人的运动规律。
向量方法是较新的建模方法之一。
它通过向量运算和微分几何来描述机器人的位姿、速度和加速度之间的关系。
例如,可以使用四元数和向量叉乘来描述机器人的姿态和运动规律。
二、动力学模型1. 定义机器人的动力学模型用于描述机器人的力、力矩和力对机器人的影响。
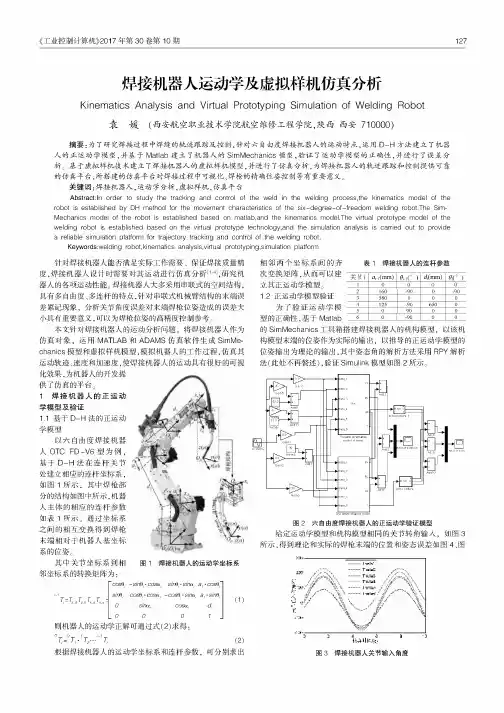
《工业控制计算机》2017年第30卷第10期127焊接机器人运动学及虚拟样机仿真分析Kinematics Analysis and Virtual Prototyping Simulation of Welding Robot袁媛(西安航空职业技术学院航空维修工程学院,陕西西安710000)摘要:为了研究焊接过程中焊缝的轨迹跟踪及控制,针对六自由度焊接机器人的运动特点,运用D-H方法建立了机器 人的正运动学模型,并基于M a tla b建立了机器人的Sim M echanics模型,验证了运动学模型的正确性,并进行了误差分 析。
基于虚拟样机技术建立了焊接机器人的虚拟样机模型,并进行了仿真分析,为焊接机器人的轨迹跟踪和控制提供可靠 的仿真平台,所搭建的仿真平台对焊接过程中可视化、焊枪的精确位姿控制等有重要意义。
关键词:焊接机器人,运动学分析,虚拟样机,仿真平台Abstract:ln order to study the tracking and control of the weld in the welding process,the kinematics model of the robot is established by DH method for the movement characteristics of the six-degree-of-freedom welding robot.The SimMechanics model of the robot is established based on matlab,and the kinematics model.The virtual prototype model of the welding robot is established based on the virtual prototype technology,and the simulation analysis is carried out to providea reliable simulation platform for trajectory tracking and control of the welding robot.Keywords:welding robot,kinematics analysis,virtual prototyping,simulation platform针对焊接机器人能否满足实际工作需要、保证焊接质量精 相邻两个坐标系间的齐表i焊接机器人的连杆参数度,焊接机器人设计时需要对其运动进行仿真分析[1-4],研究机器人的各项运动性能。
机器人控制系统的建模与仿真在当今科技迅速发展的环境下,机器人已经成为了一个不可避免的趋势。
机器人正在逐渐替代人类参与到生产、服务和研究等领域中,从而加速着工业智能化的步伐。
机器人控制系统研究的目的就在于解决机器人的控制问题,从而使机器人的性能更优、操作更稳定、可靠性更高。
本文将从机器人控制系统建模和仿真两个方面出发,介绍机器人控制系统的研究现状及未来发展方向。
一、机器人控制系统建模建模是掌握机器人控制系统的核心。
机器人控制系统建模主要包括两个方面:机械建模和动力学建模。
1、机械建模机械建模是机器人建模中的基础。
机器人的各个部分、轴、关节、执行器等都需要建立模型,从而进一步进行机器人整体的建模。
可以从以下两方面入手建模:(1)运动学建模机器人的运动学建模是机器人控制系统建模中较为基础的部分。
运动学建模的主要目的是确定机器人各个关节之间的运动学关系。
其中,关节位置、速度和加速度这三个参数都是极其重要的。
(2)动力学建模动力学建模主要是针对每个关节和执行器进行的,用于确定机器人在不同运动状态下,运动部件之间的相互作用。
在机器人进行动作时,机械设备的惯性、摩擦、以及与外界的作用力和转矩都会对机器人的动作造成一定的影响,因此,动力学建模必须要引入动力学参数,如惯性矩阵、摩擦系数、质量等。
2、动力学建模动力学建模是机器人建模的难点。
标准的机器人动力学建模是包括机器人轨迹规划、控制机器人姿态、控制机器人关节位置和逐个关节控制等步骤。
机器人的动力学建模包括以下两个步骤:(1)利用运动学公式对机械臂进行运动学分析,得到关节角度、速度和加速度等运动参数。
(2)使用动力学公式,计算机器人在保持各个关节不动时所受到的重力、摩擦、非线性力等外力和力矩,从而得到每个关节处所需的力矩以及机械臂的期望轨迹。
二、机器人控制系统仿真机器人控制系统仿真是机器人控制系统研究的重要方向之一,对机器人控制系统的设计、优化和测试具有重要作用。
机器人运动控制中的动力学建模教程机器人运动控制是机器人领域中重要的研究课题之一,而动力学建模则是其中非常关键的一环。
动力学建模的目标是描述机器人运动时所受到的力和力矩,并对其进行分析和控制。
本文将介绍机器人运动控制中的动力学建模方法,并提供一个简要的教程。
一、动力学建模的基本概念在开始动力学建模之前,我们需要了解几个基本概念。
首先是机器人的自由度,它代表机器人可以独立控制的运动维度。
例如,一个具有3个旋转关节的机器人手臂,它的自由度为3。
其次是机器人的关节,关节是机器人各个部分连接的关键点,它们可以实现相对运动。
最后是机器人的链接,链接是关节之间的连接物,可以是刚性杆件或柔性物体。
基于以上概念,我们可以将机器人建模为一个多体系统。
多体系统是由多个物体组成的系统,这些物体之间通过关节相连,并在关节处产生力和力矩。
动力学建模的目标就是描述这些力和力矩。
二、动力学建模的方法动力学建模有两种主要的方法:基于牛顿-欧拉定律的法方程方法和拉格朗日动力学方法。
在下面的教程中,我们将重点介绍第一种方法。
1. 牛顿-欧拉法方程方法牛顿-欧拉法方程方法是一种从系统总能量的角度出发推导出的方程。
它基于以下两个定律:- 动量定律:机器人系统的总动量随时间的变化率等于所有外力和内力的合力。
- 动力矩定律:机器人系统的总动力矩随时间的变化率等于所有外力矩和内力矩的合力。
通过以上两个定律,我们可以推导出牛顿-欧拉法方程,该方程描述了机器人各个关节所受到的力和力矩之间的关系。
具体推导细节可以参考相关专业书籍。
2. 动力学参数的确定动力学模型需要用到机器人的惯性参数,包括质量、惯性矩阵和地心引力等。
这些参数通常通过实验测量或拟合来获取。
有些机器人生产商会提供这些参数,但对于一些特殊设计的机器人,需要自行测量。
对于惯性参数的测量,可以通过静态测量或动态测量来进行。
在静态测量中,机器人以固定的位置保持静止,通过测量关节力矩和关节位置来推导惯性参数。
基于 MATLAB的焊接机器人运动学分析与轨迹规划摘要:随着机器人技术的发展,焊接机器人广泛应用于自动化生产之中,极大地提高了生产效率以及自动化程度。
本文以Fanuc M10i 机器人为研究对象,使用标准D-H建模的方法建立其连杆坐标系,在此基础上通过齐次变换矩阵建立运动学方程,进行正逆运动学的分析,并在MATLAB中的Robotics Toolbook中验证了正确性与合理性。
为了保证轨迹的连续、平滑,对机器人使用五次多项式插值的方法进行轨迹规划,对六个关节轴的位移,速度,加速度加以约束,在MATLAB中进行仿真得到六个关节轴连续、平滑的运动曲线,为焊接机器人在复杂环境中进行轨迹规划提供了可参考的方案。
关键词:焊接机器人;运动学;MATLAB;轨迹规划1引言焊接机器人是工业机器人的一种,是指在焊接领域代替焊接工人进行焊接任务的工业机器人机器人工,一个焊接作站可以代替两个焊接工人的工作,其优势的体现不止于此,还体现在焊接的准确性、美观性、可靠性等方面,相对人工还可以长时间工作,大大提高了生产效率,并且可以代替人工在恶劣环境进行工作。
目前焊接机器人在食品工业、电子电器、机械加工以及其他制造行业中应用十分广泛[1]在matlab中使用机器人工具箱已经成为研究机器人运动的重要手段,基于标准D-H法对其进行建模,建立运动学方程,通过MATLAB进行运动学仿真与方程计算,并验证其运动学模型与正逆运动学运算的正确性是焊接机器人焊接轨迹规划的基础和前提,正运动学验证相对比较简单,逆运动学求解复杂,比较常用的方法有代数法[2-3]、几何法[4-5]和数值迭代法[6]等。
四川大学的韩兴国提出了一种创新有效的逆运动学求解的方法,这种方法是基于RBF神经网络的,首先建立逆解预测模型,再对焊接机器人的位置参数相应的工作空间进行分区与优化,根再将其转换和归一化处理,这样就将求逆解的问题转换为基于 RBF 的 6 输入 6输出预测系统。
2012年7月 第4O卷第13期
机床与液压
MACHINE TOOL&HYDRAULICS Ju1.2012
Vo1.40 No.13
DOI:10.3969/j.issn.1001—3881.2012.13.042 变位焊接机器人系统的运动建模及分析
应灿。翟敬梅,张铁 (华南理工大学机械与汽车工程学院,广东广州510640)
摘要:研究变位焊接机器人系统的同步协调运动的实现。在SolidWorks2010软件中建立了该机器人系统模型,同时给 出了其同步协调运动的算法和实现步骤;以半球面空间螺旋曲线为焊接路径,对机器人与变位机的同步协调运动进行仿真 分析,发现焊枪末端能够以较高精度和较好位姿跟踪该焊缝曲线,为变位焊接机器人系统的同步协调运动的实现提供了理
论依据。 关键词:变位焊接机器人系统;运动建模;同步协调运动
中图分类号:TP242.2 文献标识码:A 文章编号:1001—3881(2012)13—143—4
Motion Modeling and Analysis for Robot・positioner System YING Can.ZHAI Jingmei,ZHANG Tie f School of Mechanical&Automobile Engineering.South China University of Technology,Guangzhou Guangdong 5 10640,China) Abstract:The realization of coordinated motion of robot-positioner system was studied.The model of robot—positioner system was built in SolidWorks2010.Meanwhile,the algorithm and implementation procedure of its coordinated motion were presented.The CO・ ordinated motion between the robot and the positioner was simulated by using the hemispherical helical curve as the welding path.It is found the seam curve can be tracked with high accuracy and good position by welding torch.It proEides a theoretical basis for achieving the coordinated motion of robot-positioner system. Keywords:Robot—positioner system;Motion modeling;Coordinated motion
焊接机器人系统有固定工件焊接和变位机焊接之 分。固定工件的焊接机器人系统存在以下缺陷:(1) 因机器人工作空间的限制一般无法处理大型工件; (2)对于曲率变化较大的焊缝曲线很难保证较高的 跟踪精度 。变位焊接机器人系统不但能够弥补以上 缺陷,而且增加了机器人系统的灵活度,使其具备更 快的执行速度。变位焊接机器人系统同步协调运动的 实现是整个机器人系统的核心问题,对其进行研究具 有重要意义。 文献[2—4]都对同步协调运动中变位机的逆 运动学算法进行了研究,其中文献[2—3]给出了 平焊或船型焊时RT变位机的逆运动学算法,而文献 [4]则给出了一种较为通用的2R变位机的逆运动学 算法。文献[5—6]研究了通过示教再现获取示教 关键点来实现弧焊机器人与变位机的同步协调运动, 认为复杂的焊缝曲线都是由直线和圆弧两种线型要素 组成,并通过完成针对这两种线型的协调运动来说明 整个机器人系统的同步协调运动关系。 采用SolidWorks2010软件建立了变位焊接机器人 系统模型,同时给出了其同步协调运动的算法和实现 步骤,并在离线的情况下针对该机器人系统的同步协 调运动进行了仿真分析。 1 变位焊接机器人系统模型的建立 1.1 变位焊接机器人系统各轴坐标系的建立 该变位焊接机器人系统主要由一个六自由度垂直 关节型机器人和一个二自由度RT变位机组成。为了 方便该机器人系统运动学方程的建立,应根据 Denavit—Hartenberg参数要求对其各部分建立坐标系, 如图i所示。其中世界坐标系{W}、机器人基坐标 系{RB}和变位机基坐标系{朋}为固定坐标系, 变位机8轴坐标系{8一cs}、工作台坐标系{TB} 和工件坐标系{WP}的坐标原点重合。此外还有另 外3处的2个坐标系的坐标原点也重合。 1.2焊点坐标系一般表达式的建立 为了能够说明变位焊接机器人系统同步协调运动 关系,焊缝应为较为复杂的空间曲线。以工业和生活 中较为常见的半球面空间螺旋曲线L为例,如图2所 示。
收稿日期:2011—06—17 基金项目:863重点项目(2009AA043901-3);粤港关键领域招标(20090101—1);广东省科技计划项目(2010B080703004) 作者简介:应灿(1987一),男,硕士研究生,主要从事机器人技术及其工程应用的研究。E—mail:ying_can@foxmail.corn。 ・144・ 机床与液压 第40卷 Z 1-CS}
{ —世界坐标系{JL8卜一机器人基坐标系 {l-c 一机器人1轴坐标系 {2.cs ̄—机器人2轴坐标系 {3-C —机器人3轴坐标系{4-cs}一机器 人4轴坐标系{5-cs}一机器人5轴坐标系f6-cs}一机器人6轴坐标系 ㈣—焊枪末端坐标系 卜_垄E位机基坐标系{7-cs'}—变位机7轴坐标系 fs-cs}—变位机8轴坐标系 {佃卜一工作台坐标系{ ,}一工件坐标系 {加一待焊点坐标系
图1 变位焊接机器人系统各轴坐标系
半球面S的方程: F( ,Y,z)=z一,/R。一 一Y =0 f2) 在图2中,待焊点M(x。,Yo,Zo)是该空间螺旋曲 线在t=t。时的一点,可在此点建立待焊点坐标系。 方法如下:令M( 。,Yo,Z0)处切向量的负方向的单位 向量为待焊点坐标系的 轴,焊缝曲线所在半球面的 外法线的单位向量为焊点坐标系的z轴,使用“右手 法则”得到焊点坐标系的Y轴。
图2待焊点坐标系的建立 按照以上建立待焊点坐标系的方法,借助式 (1)、(2)可计算出焊点坐标系相对于工件坐标系的 转换矩阵为:
其方程为: I " p f =、//R 一z sin4"rrt :I r ” p, {
y: .cos41T£o≤ ≤l (1) l 【 : L 0 0 0 1 其中:R:200。由式(1)可知该空间螺旋曲线所在 其中:
T『4xr(1一t )cos4,trtn—tosin4 ̄t0 4,rr(1一t )sin4,trt0+toCOS41rt0 【一— ’—
= ;
×P = e ,e",erz]T= e班e 一e e ,e e嚣一e船e站,e e 一e辩e ]T
(3) ez=[ , , ] =[鲁,等,詈】=[ in4订 。sg"fito,to】 P0=[P ,P ,P ] =[R ̄/1一£;sin41T£o,R,/1一tocos4 ̄rt0,Rt0j 2变位焊接机器人系统的同步协调运动算法 换矩阵; 为机器人6轴坐标系相对于机器人基坐 2.1 变位焊接机器人系统同步协调运动关系的数 标系的转换矩阵; 为焊枪末端坐标系相对于机器 r手捆还 人6轴坐标系的转换矩阵; 为变位机基坐标系相
… 竺 薏餮 I焊釜 里隽 对于世界坐标系的转换矩阵;P邝B 为工作台坐标系相 曼 是 2 力 忠 ; 丕
; 三 三 量 对于
一些空间复杂曲线焊缝,变位机可以移动工件使 ‘ 一 一 待焊点坐标系到达指定的焊接位姿,机器人则控制焊 相对于工作台坐标系的转换矩阵; 为待焊点坐标
枪末端坐标系,根据一定的焊接工艺要求,与待焊点 系相对于工件坐标系的转换矩阵;.Mr为焊枪末端坐 坐标系进行耦合 ,从而使焊接过程中的待焊点依次 标系相对于待焊点坐标系的转换矩阵。 更替并调整到最佳焊接位姿,焊枪末端以一定的焊接 式(4)等号左边是焊枪末端坐标系经变位机相 工艺要求跟踪该待焊点。具体运动学方程如下式 对于世界坐标系的矩阵变换,式(4)等号右边是焊 (4) : 枪末端坐标系经机器人相对于世界坐标系的变换矩 ・P佃B
・ ・ ・: = ・ ・ (4) 阵。关于: 的确定与具体的焊接工艺有关,使用
式中: 为机器人基坐标系相对于世界坐标系的转 .),. 固定坐标系表示法,通过事先确定滚动角、俯仰 第13期 应灿等:变位焊接机器人系统的运动建模及分析 ・145・ 角和偏转角来得到变换矩阵 。 为了方便变位机与机器人的正、逆解,可以将式 (4)改写为式(5)和(6)的组合: (,St)~・ ・: ・( )~= (5)
= ・P B ・T胛B
・ (6)
2.2变位机与机器人的正、逆解算法 2.2.1变位机部分的正、逆解算法 式(6)是变位机部分的正解方程,经计算可得 到待焊点坐标系经变位机相对于世界坐标系的转换矩 阵及其各元素的表达式,如式(7):
= 口 P 。 Py
a P z
0 l
(7)
其中: 口 =e≈ sino7+ eos0 ̄。cos08+e ’cos07‘sin08 0 =e”‘sin08一e 。cos08 Ⅱ =e≈。COS07一e y・cos08・sin07一e ・sin07。sin08 n =e 。sin07+e ’cos07。cos08+e ‘CO807。sin08 口"=e ’sin08一e ’cos08 口声=e ‘COS07一e ‘cos08‘sin07一e ‘sin07。sin08 口 =e≈‘sin07+e ‘cos07・cos08+e ・cos07・sin0s 口 =e 。sin08一e ’cos0s 口 =e日‘cos07一e ’cos08‘sin07一e 。sin07。sin08 P =A+C・sin07+p:・sin07+py・cos07・cos08+ P 。cos07‘sin08 Py py‘sin08一P 。cos08 P:=B+C・cos07+p;・cos07-p ・cos08・sin07一
P ’sin07。sin0s 式中:A为沿{ }的 轴,从{ }的=轴移动到{PB} 的z轴的距离;B为沿{PB}的 轴,从{PB}的z轴 移动到{7一c5}的 轴的距离;C为沿{8一cS}的z 轴,从{7一cS}的 轴移动到{8一cs}的 轴的距离; 为变位机7轴相对于相对零点的倾斜角;0。为变 位机8轴相对于相对零点的旋转角。 待焊点坐标系的。轴方向与两焊板表面法线的角 平分线重合。对于平焊或船型焊,工件的最佳焊位是 让焊点坐标系的z轴始终处于竖直方向 ]。即: 【0 0 0 】 =【0 0±1】 (8) 由式(7)、(8),得到焊点坐标系达到最佳焊接 位姿需满足下列方程组: r口 =e 。sin +e 。eos0 ̄。cos08+e ‘cos07・sin08=0 {n =e ‘sin08一e瓤。c0s08=0 L口荔=e盐。cos07一e计‘cos08。sin07一e ・sin07・sin08=±1