MEMS陀螺随机漂移在线补偿技术
- 格式:pdf
- 大小:328.28 KB
- 文档页数:5
MEMS陀螺误差模型标定实验与分析李勋;张欣;孙朔冬;鲍其莲【摘要】In this paper, two simplified linear and nonlinear models were established for MEMS gyroscopes static errors as well as a random model for random errors exiting in gyroscopes. Parameters of static models were estimated by least square method. The parameters of random error models were given by Allan variance analysis. The experiment results of two MEMS gyroscopes showed that the characteristic parameters are determined by given methods.%陀螺仪的误差模型与标定对于陀螺仪误差补偿非常关键.本论文针对陀螺仪的误差,分别建立了静态一阶与二阶简化模型以及随机误差模型,通过采用最小二乘法与Allan方差分析法进行了参数标定.最后,通过MEMS陀螺的实验结果获得了陀螺的特性参数,验证了模型及标定方法的有效性.【期刊名称】《电子设计工程》【年(卷),期】2017(025)017【总页数】4页(P164-167)【关键词】陀螺仪;误差模型;最小二乘法;Allan方差【作者】李勋;张欣;孙朔冬;鲍其莲【作者单位】深圳供电局有限公司广东深圳 518048;深圳供电局有限公司广东深圳 518048;上海交通大学电子信息与电气工程学院,上海200240;上海交通大学电子信息与电气工程学院,上海200240【正文语种】中文【中图分类】TN967.2微惯性器件是MEMS发展的重点,如硅微加速度计、硅微陀螺仪和硅微惯性测量组合等,硅微惯性器件相较于传统陀螺,具有轻便易于安装、使用寿命长、可靠性高、耐冲击、易于批量生产等特点,在汽车、无人机、等导航系统中具有广泛应用。
mems陀螺仪mems陀螺仪即硅微机电陀螺仪,绝大多数的MEMS陀螺仪依赖于相互正交的振动和转动引起的交变科里奥利力。
MEMS (Micro-Electro-Mechanical Systems)是指集机械元素、微型传感器、微型执行器以及信号处理和控制电路、接口电路、通信和电源于一体的完整微型机电系统。
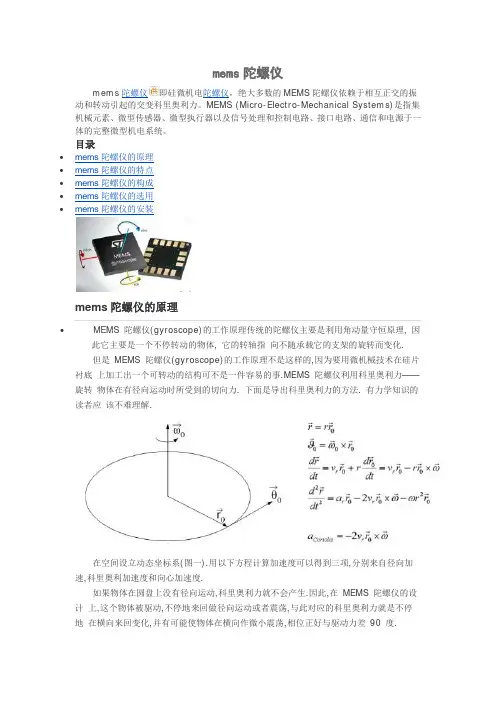
目录•mems陀螺仪的原理•mems陀螺仪的特点•mems陀螺仪的构成•mems陀螺仪的选用•mems陀螺仪的安装mems陀螺仪的原理•MEMS 陀螺仪(gyroscope)的工作原理传统的陀螺仪主要是利用角动量守恒原理, 因此它主要是一个不停转动的物体, 它的转轴指向不随承载它的支架的旋转而变化.但是MEMS 陀螺仪(gyroscope)的工作原理不是这样的,因为要用微机械技术在硅片衬底上加工出一个可转动的结构可不是一件容易的事.MEMS 陀螺仪利用科里奥利力——旋转物体在有径向运动时所受到的切向力. 下面是导出科里奥利力的方法. 有力学知识的读者应该不难理解.在空间设立动态坐标系(图一).用以下方程计算加速度可以得到三项,分别来自径向加速,科里奥利加速度和向心加速度.如果物体在圆盘上没有径向运动,科里奥利力就不会产生.因此,在MEMS 陀螺仪的设计上,这个物体被驱动,不停地来回做径向运动或者震荡,与此对应的科里奥利力就是不停地在横向来回变化,并有可能使物体在横向作微小震荡,相位正好与驱动力差90 度.MEMS 陀螺仪通常有两个方向的可移动电容板.径向的电容板加震荡电压迫使物体作径向运动(有点象加速度计中的自测试模式) ,横向的电容板测量由于横向科里奥利运动带来的电容变化(就象加速度计测量加速度) .因为科里奥利力正比于角速度,所以由电容的变化可以计算出角速度.mems陀螺仪的特点•MEMS陀螺仪是利用coriolis 定理,将旋转物体的角速度转换成与角速度成正比的直流电压信号,其核心部件通过掺杂技术、光刻技术、腐蚀技术、LIGA技术、封装技术等批量生产的,它主要特点是1. 体积小、重量轻,其边长都小于1mm,器件核心的重量仅为1.2mg。
光纤陀螺零偏漂移的温度特性与补偿侯宏录;李光耀;李媛【摘要】光纤陀螺的主要器件(如光纤环圈、宽带光源)易受周围温度变化的影响,导致陀螺输出产生较大漂移,严重影响测量精度.因此,需要采取措施降低光纤陀螺随温度零偏漂移.首先,根据光纤陀螺的工作原理,对光纤陀螺零偏漂移产生的机理和温度特性进行了分析,阐述了光纤零偏漂移的温度特性.其次,设计完成了在-40~+60℃范围内的光纤陀螺静态零偏测试试验.试验数据表明,不同温度和温度变化率会对陀螺的零偏造成影响.再次,采用回归分析法建立了光线陀螺零偏漂移的温度模型,并利用该模型对光纤陀螺零偏进行补偿.该模型是考虑温度和温度变化率的二阶多项式模型.最后,对光纤陀螺零偏漂移的补偿效果进行了试验验证,证明补偿后零偏漂移稳定性提高了69%左右.该补偿方法与BP神经网络、受控马尔科夫链模型、模糊逻辑等方法相比,具有计算量小、利于工程化应用的优点.【期刊名称】《自动化仪表》【年(卷),期】2019(040)003【总页数】6页(P59-63,68)【关键词】光纤陀螺;Sagnac效应;Shupe效应;零偏漂移;温度补偿;线性回归;超辐射发光二极管;光纤传感器【作者】侯宏录;李光耀;李媛【作者单位】西安工业大学光电工程学院,陕西西安 710021;西安工业大学光电工程学院,陕西西安 710021;西安工业大学光电工程学院,陕西西安 710021【正文语种】中文【中图分类】TH7410 引言光纤陀螺(fiber optic gyroscope,FOG)是一种基于Sagnac效应的光电惯性敏感器件,广泛应用于伺服控制和惯性导航等领域,在实际应用中要求有较宽的工作温度范围[1](-40~+60 ℃)。
然而,光纤陀螺部件的固有噪声和性能缺陷会导致光纤陀螺在输入角速率为零时仍有输出。
该输出即为光纤陀螺零偏。
另外,光纤陀螺的主要器件(如光纤环圈、宽带光源)易受温度变化的影响,导致陀螺输出产生较大误差。
考虑温度补偿的陀螺仪非线性校正算法研究陀螺仪作为一种常见的惯性导航传感器,广泛应用于导航、运动控制以及姿态测量等领域。
然而,在实际应用中,陀螺仪存在着温度漂移等非线性误差,影响了其测量精度和稳定性。
因此,对陀螺仪的温度补偿和非线性校正算法进行研究具有重要意义。
一、温度对陀螺仪的影响陀螺仪的工作稳定性受到环境温度变化的影响。
当环境温度发生变化时,陀螺仪内部的物理参数也会随之发生变化。
这种温度漂移会导致陀螺仪输出信号的非线性误差,从而降低测量精度和稳定性。
因此,为了获得更为准确的测量结果,需要对陀螺仪进行温度补偿。
二、温度补偿方法目前,常用的陀螺仪温度补偿方法有零偏温度补偿和比例温度补偿两种。
1. 零偏温度补偿零偏是指陀螺仪在零速度条件下输出的非零信号。
零偏随着温度的变化而发生漂移,影响了陀螺仪的测量精度。
零偏温度补偿方法通过建立温度和零偏之间的函数关系,根据温度变化实时补偿陀螺仪的零偏误差。
2. 比例温度补偿比例温度补偿方法是通过校正陀螺仪输出信号的增益系数,将其与温度变化建立函数关系,并根据该关系进行温度补偿。
这种方法可以降低陀螺仪的温度漂移误差,提高测量精度。
三、陀螺仪非线性校正算法除了温度补偿外,陀螺仪还存在非线性误差,即输出信号与输入信号之间存在非线性关系。
非线性误差的存在会影响陀螺仪的测量精度和稳定性。
因此,进行陀螺仪的非线性校正是必要的。
目前,常见的陀螺仪非线性校正算法包括多项式拟合法、神经网络法和粒子滤波法等。
1. 多项式拟合法多项式拟合法是通过建立陀螺仪输出与输入信号之间的多项式函数关系,利用最小二乘法确定多项式的系数,从而实现非线性校正。
这种方法简单直观,但在高精度要求下,可能需要较高阶数的多项式来拟合,增加了运算量和计算复杂度。
2. 神经网络法神经网络法通过构建一个具有学习能力的神经网络模型,将陀螺仪的输入与输出信号作为训练集,通过多次迭代调整神经网络的参数,实现非线性校正。
这种方法的优点是能够在复杂非线性系统中提供较好的拟合效果,但需要大量的训练数据和计算资源。
MEMS传感器MEMS传感器是采用微电子和微机械加工技术制造出来的新型传感器,与传统的传感器相比,它具有:微型化,集成化,低功耗,低成本,高精度,长寿命,动态性能好,可靠性高,适于批量生产,易于集成和实现智能化的特点,在微米量级的特征尺寸使得它可以完成某些传统机械传感器所不能实现的功能。
MEMS传感器的种类有很多,发展很快但在这几年发展速度放缓,MEMS传感器的种类很多导致了其分类方法很多。
按其工作原理, 可分为物理型、化学型和生物型三类M EM S 传感器分类及典型应用。
按照被测的量又可分为加速度、角速度、压力、位移、流量、电量、磁场、红外、温度、气体成分、湿度、pH 值、离子浓度、生物浓度及触觉等类型的传感器。
目前MEMS传感器的工作原理主要有压阻式,电容式,压电式,力平衡式,热对流式,谐振式等。
一.1.MEMS压力传感器MEMS传感器的发展以20世纪60年代霍尼韦尔研究中心和贝尔实验室研制出首硅隔膜压力传感器和应变计为开端。
压力传感器是影响最为深远且应用最广泛的MEMS传感器, 其性能由测量范围、测量精度、非线性和工作温度决定。
从信号检测方式划分, MEMS压力传感器可分为压阻式、电容式和谐振式等; 从敏感膜结构划分, 可分为圆形、方形、矩形和E 形等。
硅压力传感器主要是硅扩散型压阻式压力传感器, 其工艺成熟, 尺寸较小, 且性能优异, 性价比较高。
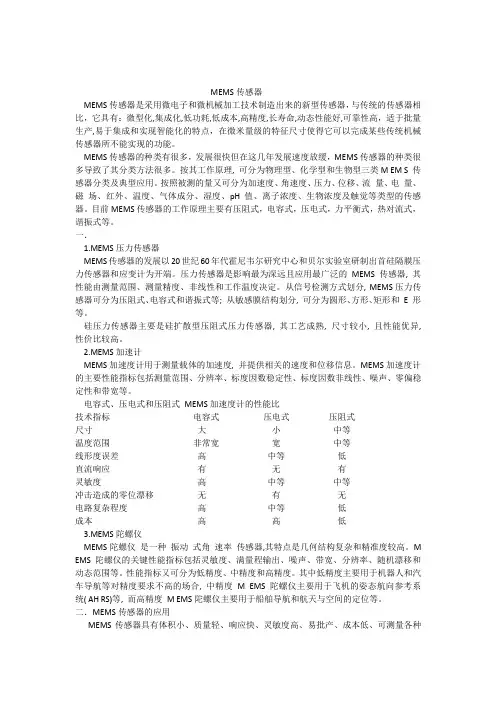
2.MEMS加速计MEMS加速度计用于测量载体的加速度, 并提供相关的速度和位移信息。
MEMS加速度计的主要性能指标包括测量范围、分辨率、标度因数稳定性、标度因数非线性、噪声、零偏稳定性和带宽等。
电容式、压电式和压阻式MEMS加速度计的性能比技术指标电容式压电式压阻式尺寸大小中等温度范围非常宽宽中等线形度误差高中等低直流响应有无有灵敏度高中等中等冲击造成的零位漂移无有无电路复杂程度高中等低成本高高低3.MEMS陀螺仪MEMS陀螺仪是一种振动式角速率传感器,其特点是几何结构复杂和精准度较高。


2021年第40卷第6期传感器与微系统(Transducer and Microsystem Technologies)5DOI:10.13873/J.1000-9787(2021)06-0005-03旋转式MEMS惯性导航系统的发展及应用*王思远,罗世彬(中南大学航空航天学院,湖南长沙410086)摘要:旋转调制技术通过将惯性导航系统进行周期性的旋转,可以有效地补偿惯性传感器的常值误差,提高导航精度,因此在近些年得到广泛关注。
对比分析了微机电系统(MEMS)惯性导航系统以及旋转调制技术的国内外发展现状;阐述了MEMS旋转调制方案设计的关键点及发展方向。
关键词:微机电系统惯性导航系统;旋转调制;惯性导航系统;误差补偿中图分类号:TP212;U666.1文献标识码:A 文章编号:1000-9787(2021)06-0005-03Development and application of rotary MEMS inertialnavigation system"WANG Siyuan,LUO Shibin(School of Aeronautics and Astronautics,Central South University,Changsha410086,China)Abstract:Rotation modulation technology can effectively compensate the constant error of the inertial sensor andimprove the navigation precision by periodically rotating the inertial navigation system・Therefore,it has receivedextensive attention in recent years・The domestic and foreign development status of micro-electro・mechanicalsystem(MEMS)inertial navigation system and rotation modulation technology are compared and analyzed.The keypoints and development direction of MEMS rotary modulation scheme design are described.Keywords:micro-electro-mechanical system(MEMS)inertial navigation system;rotational modulation;inertialnavigation system;enor compensation0引言惯性导航技术由于其具有自主性、全天候、抗干扰等特点,而成为众多导航技术中可实现自主导航的一种最重要的技术手段o由于微机电系统(micro-eleclro-mechani-cal system,MEMS)惯性传感器具有成本低,体积重量小,强抗冲击及功耗低等优点,在惯性导航领域中发挥着重要作用。
一种MEMS陀螺仪的标定方法研究MEMS陀螺仪是一种使用微机电系统技术制造的陀螺仪传感器,具有体积小、功耗低和价格低廉等优点,在导航、姿态控制和运动测量等领域得到广泛应用。
然而,由于制造工艺和环境因素的影响,MEMS陀螺仪会存在一些误差,如零偏误差、比例因子误差和尺度因子误差等。
为了提高MEMS陀螺仪的测量精度,需要对其进行标定。
一种常用的MEMS陀螺仪标定方法是基于静态标定和动态标定两个步骤的组合方法。
下面将详细介绍这两个步骤的标定方法。
1.静态标定:静态标定主要用于减小MEMS陀螺仪的零偏误差。
具体步骤如下:(1)将MEMS陀螺仪固定在一个稳定的平面上,使其与重力矢量在一个平面内。
(2)启动MEMS陀螺仪,并记录一段时间内的输出数据。
这段时间内,MEMS陀螺仪应保持静止,只受到重力的作用。
(3)对于每个轴向,通过计算输出数据的平均值,得到静态零偏误差。
2.动态标定:动态标定主要用于减小MEMS陀螺仪的比例因子误差和尺度因子误差。
具体步骤如下:(1)将MEMS陀螺仪固定在旋转平台上,使其可以围绕一个或多个轴向旋转。
(2)启动MEMS陀螺仪,并记录旋转平台的角度。
可以通过旋转传感器或者激光测距传感器等设备获取角度信息。
(3)分析MEMS陀螺仪和旋转平台的输出数据,通过最小二乘法或者拟合等方法,得到比例因子误差和尺度因子误差的校正参数。
在实际应用中,一般会将静态标定和动态标定两个步骤结合起来进行综合标定,以获得更准确的标定结果。
此外,还可以使用自适应滤波算法对标定结果进行进一步处理,提高MEMS陀螺仪的测量精度。
总结起来,MEMS陀螺仪的标定方法主要包括静态标定和动态标定两个步骤。
静态标定主要用于减小零偏误差,而动态标定主要用于减小比例因子误差和尺度因子误差。
这些标定方法可以通过记录输出数据并进行计算、分析和校正参数等步骤来完成。
通过标定可以提高MEMS陀螺仪的测量精度,进而提高导航、姿态控制和运动测量等应用的准确性。