陀螺仪随机漂移
- 格式:pdf
- 大小:236.72 KB
- 文档页数:10
MEMS陀螺仪可以通过许多指标进行评估。
以下是一些常见的指标:
1.测量范围:是指陀螺仪可以测量的最大旋转速率或最大旋转角度。
它通常以度/秒为单位表示。
2.灵敏度:是指陀螺仪输出的每个单位(即每个度/秒)的电压或数字输入,通常以mV/度/秒或LSB/deg/sec为单位。
3.漂移:是指陀螺仪在没有旋转或运动时产生的电压或数字变化。
它通常以度/小时或度/秒为单位表示。
4.零偏:是指陀螺仪输出的电压或数字值,即使在没有旋转或运动的情况下,也会存在一些偏差。
它通常以度/秒为单位表示。
5.频率响应:是指陀螺仪对旋转速率变化的响应时间,它通常以Hz为单位表示。
6.噪声:是指陀螺仪输出的随机变化,通常以mV或LSB为单位表示。
噪声越低,陀螺仪的性能越好。
7.温度漂移和灵敏度漂移:是指陀螺仪在不同温度下的输出变化程度,它通常以度/小时或度/秒为单位表示。
这些指标可以帮助评估MEMS陀螺仪的性能,在选择和设计陀螺仪时非常重要。
陀螺仪角度随机游走定义
陀螺仪角度随机游走是指陀螺仪在没有外界干扰的情况下,其角度随机变化的
性质。
陀螺仪是一种测量和检测物体旋转姿态的装置,在惯性导航系统、航空航天等领域有着广泛的应用。
陀螺仪内部的转子通过陀螺效应来感应旋转角度,这种效应是指当陀螺仪在一
定速度旋转时,会产生一个力矩,使其保持固定的旋转轴。
然而,在没有外界干扰的情况下,陀螺仪的旋转轴并不总是能保持在一个特定的方向上。
陀螺仪角度随机游走是由于微小的不均匀性和噪音引起的。
陀螺仪内部的各种
元件、材料和电路都存在微小的不均匀性,这些不均匀性会导致转子受到微小的扰动。
而同时,环境中的噪音也会对陀螺仪产生影响。
这些微小的扰动和噪音导致了陀螺仪角度的随机变化。
陀螺仪角度随机游走在实际应用中需要进行补偿和校正。
由于随机游走的性质,陀螺仪在长时间的使用中角度会逐渐偏离真实值。
为了解决这个问题,需要利用其他传感器或者算法来校正陀螺仪的角度,以确保其测量结果的准确性。
总之,陀螺仪角度随机游走是由于微小的不均匀性和噪音引起的陀螺仪角度随
机变化现象。
在实际应用中,需要进行补偿和校正,以确保陀螺仪测量结果的准确性。

陀螺仪⾼精度寻北⽅法 ⼈们普遍认为是1850年法国的物理学家莱昂·傅科(J.Foucault)为了研究地球⾃转,发明了陀螺仪。
那个时代的陀螺仪可以理解成把⼀个⾼速旋转的陀螺放到⼀个万向⽀架上⾯,这样因为陀螺在⾼速旋转时保持稳定,⼈们就可以通过陀螺的⽅向来辨认⽅向,确定姿态,计算⾓速度。
⼀、陀螺仪的发明 陀螺仪先后被⽤在航海上和航空上,因为飞机飞在空中,是⽆法像地⾯⼀样靠⾁眼辨认⽅向的,危险性极⾼,所以陀螺仪迅速得到了应⽤,成为飞⾏仪表的核⼼。
到了第⼆次世界⼤战,德国⼈搞了飞弹去炸英国,从德国飞到英国,千⾥迢迢怎么让飞弹能击中⽬标呢?于是,德国⼈搞出来惯性制导系统。
惯性制导系统采⽤⽤陀螺仪确定⽅向和⾓速度,⽤加速度计测试加速度,然后控制飞⾏姿态,争取让飞弹落到想去的地⽅。
⼆战时候,计算机和仪器的精度都是不太够的,所以德国的飞弹偏差很⼤,想要炸伦敦,结果炸得到处都是,让英国⼈恐慌了⼀阵。
不过,从此以后,以陀螺仪为核⼼的惯性制导系统就被⼴泛应⽤于航空航天,今天的导弹⾥⾯依然有这套东西,⽽随着需求的刺激,陀螺仪也在不断进化。
⼆、陀螺仪的进化 最早的陀螺仪都是机械式的,⾥⾯真有⾼速旋转的陀螺,⽽机械的东西对加⼯精度有很⾼的要求,还怕震动,因此机械陀螺仪为基础的导航系统精度⼀直都不太⾼。
于是,⼈们开始寻找更好的办法,利⽤物理学上的进步,发展出激光陀螺仪,光纤陀螺仪,以及微机电陀螺仪(MEMS)。
这些东西虽然还叫陀螺仪,但是它们的原理和传统的机械陀螺仪已经完全是两码事了。
光纤陀螺仪利⽤的是萨格纳克(Sagnac)效应,通过光传播的特性,测量光程差计算出旋转的⾓速度,起到陀螺仪的作⽤,替代陀螺仪的功能。
激光陀螺仪也是通过算光程差计算⾓速度,替代陀螺仪。
微机电陀螺仪则是利⽤物理学的科⾥奥利⼒,在内部产⽣微⼩的电容变化,然后测量电容,计算出⾓速度,替代陀螺仪。
iPhone和我们的智能⼿机⾥⾯所⽤的陀螺仪,就是微机电陀螺仪(MEMS)。
自动驾驶基础(六十七)--惯性测量单元(IMU)十三MEMS陀螺仪的重要参数包括:量程(动态范围)DYNANMIC RANGE,分辨率(Resolution)、零角速度输出(零位输出)、灵敏度(Sensitivity)。
这些参数是评判MEMS陀螺仪性能好坏的重要标志,同时也决定陀螺仪的应用环境。
下面我们把MEMS陀螺仪的主要性能参数列出来,并做简单介绍:·量程(动态范围) DYNAMIC RANGE陀螺仪的量程通常以正、反方向输入角速率的最大值来表示,比如:+/-300 degree/sec。
该值越大表示陀螺仪敏感角速率的能力越强,在此输入角速率范围内,陀螺仪刻度因子非线性度能满足规定要求,通常陀螺仪的量程是可以配置的。
·灵敏度(分辨率)SENSORTIVITY RESOLUTION灵敏度(分辨率)表示在规定的输入角速率下能感知的最小输入角速率的增量,比如:0.05 degree/sec/LSB。
一般而言MEMS陀螺仪的测量范围越大,灵敏度会相应降低。
分辨率是指陀螺仪能检测的最小角速度,该参数与零角速度输出其实是由陀螺仪的白噪声决定。
•零角速度输出(零位输出)ZERO OUTPUTMEMS陀螺仪的误差主要包括零位误差和动态误差,一般重点对零位误差做处理。
零位误差又分为零值偏移误差和随机漂移误差,目前对MEMS陀螺仪零位误差的估算方法主要包括1σ和Allan方差两种方法。
1σ方法得到的是误差的总体指标,Allan方差分析法可以对误差的各种成分进行有效的分析。
目前对零值偏移误差的补偿方法比较简单,一般采用在静态条件下测定零值偏移常量,在应用中通常采用对其一次性的零值偏移补偿的方法。
在陀螺仪长时间工作以及外界环境发生变化条件下,零值偏移量并非恒定值,所以这种简单的零值偏移误差补偿方法存在很大的缺陷。
对陀螺仪的随机漂移误差补偿,目前常采用Kalman滤波的方法,因这种方法具有较好的实时性得到了广泛的引用,但是Kalman滤波法要求信号必须是平稳时间序列,且要知道信号的激励噪声和观测噪声的方差。
陀螺仪卡尔曼滤波漂移
卡尔曼滤波是一种在各种系统估计和控制系统应用中广泛使用的先进算法,其中包括陀螺仪。
然而,当使用卡尔曼滤波对陀螺仪数据进行处理时,可能会遇到一个常见的问题——漂移。
这种漂移现象通常是由于陀螺仪内部的物理特性导致的,例如热效应、非理想因素等,这些因素可能导致陀螺仪读数的长期偏差,进而严重影响其准确性。
为了解决这个问题,我们可以采取一些方法来减小陀螺仪的漂移。
首先,可以采用更精确的陀螺仪技术来提高测量值的准确性。
其次,可以在系统中使用其他传感器,如加速度计和磁力计等,来辅助姿态估计,以减少对陀螺仪数据的依赖。
此外,还可以通过校准和补偿技术来减小陀螺仪的漂移。
这些方法的应用可以有效地提高姿态估计的准确性,从而解决卡尔曼滤波在处理陀螺仪数据时遇到的问题。
虽然卡尔曼滤波可以用于处理陀螺仪数据,但是由于陀螺仪可能存在的漂移问题,需要采取一些有效的措施来减小其影响。
一种陀螺仪零点漂移的校准方法与流程
陀螺仪的零点漂移是指在无旋转状态下,陀螺仪输出的角速度不能为0的现象。
为了纠正和校准陀螺仪的零点漂移,可以采用以下方法和流程:
1. 初始化:打开陀螺仪并连接到电脑或微控制器等设备上。
2. 数据采集:将陀螺仪固定在静止状态下,保持一段时间(如30秒),期间采集陀螺仪输出的角速度数据。
3. 分析数据:将采集到的角速度数据进行分析,计算平均值。
4. 判断零点漂移:将平均值与零点漂移阈值进行比较,判断陀螺仪是否存在零点漂移现象。
5. 校准零点漂移:如果判断陀螺仪存在零点漂移,则进行校准。
校准方法可以采用两种方式:
a. 软件校准:在软件层面上对陀螺仪的输出进行校准,通过
对输出值进行偏移修正,使得零点漂移降低或消除。
校准方法可以根据陀螺仪的具体型号和驱动程序提供的接口进行选择。
b. 硬件校准:通过物理操作对陀螺仪进行校准。
一种常用的
方法是将陀螺仪放置在温度恒定的环境中,并保持静止。
在此过程中,通过传感器测量温度和角速度,并根据预先制定的模型对零点漂移进行估计和校准。
6. 校验校准效果:校准完成后,可以重新采集陀螺仪输出的角速度数据,并进行分析和比较,以验证校准效果。
陀螺仪的零点漂移校准是一个迭代的过程,可能需要多次尝试和调整参数来优化校准效果。
在实际应用中,可以根据具体需求和设备要求来选择适合的校准方法和流程。
陀螺角度随机游走系数和陀螺噪声单位转换-概述说明以及解释1.引言1.1 概述概述:陀螺角度随机游走系数和陀螺噪声单位转换是陀螺仪在导航、飞行控制等领域中非常重要的参数和技术。
随机游走系数是描述陀螺仪输出信号随机漂移的一个重要指标,而噪声单位转换则是将陀螺噪声从一种单位转换为另一种单位,以方便分析和应用。
本文将从背景介绍、定义和计算方法、噪声的来源和特点、单位转换的原理和方法等方面系统地介绍陀螺角度随机游走系数和陀螺噪声单位转换的相关知识,希望能够帮助读者更好地理解和应用这些技术。
1.2文章结构1.2 文章结构本文将分为三个主要部分:引言、正文和结论。
在引言部分,将介绍本文研究的背景和意义,以及文章的结构安排。
在正文部分,将分为两个小节:陀螺角度随机游走系数和陀螺噪声单位转换。
在陀螺角度随机游走系数部分,将首先介绍背景知识,然后详细解释游走系数的定义和计算方法。
在陀螺噪声单位转换部分,将探讨噪声的来源和特点,然后深入讨论单位转换的原理和方法。
在结论部分,将总结陀螺角度随机游走系数和陀螺噪声单位转换的研究成果,分析它们对陀螺的影响及应用。
1.3 目的本文的主要目的是探讨陀螺角度随机游走系数和陀螺噪声单位转换的相关理论和方法。
通过对陀螺角度随机游走系数的背景介绍和计算方法的详细论述,希望读者能够更深入地了解陀螺在实际应用中的角度变化规律。
同时,对陀螺噪声单位转换的原理和方法进行讨论,旨在帮助读者更好地理解陀螺噪声的特点以及如何进行单位转换以满足实际需求。
通过本文的研究,可以为陀螺在导航、航空航天等领域的应用提供理论支持和技术参考,进一步提高陀螺系统的性能和精度,促进相关领域的发展和进步。
希望读者通过阅读本文,能够深入了解陀螺技术的前沿发展动态,拓宽视野,提升专业水平。
2.正文2.1 陀螺角度随机游走系数2.1.1 背景介绍陀螺角度随机游走系数是描述陀螺仪在姿态估计中的误差漂移情况的重要参数之一。
在惯性导航系统中,陀螺角度随机游走系数表示了陀螺仪输出角度随机误差的增长速率。
微机电陀螺随机漂移建模与卡尔曼滤波
杨庆辉;杜红英;陈雄;周长省
【期刊名称】《计算机仿真》
【年(卷),期】2015(032)003
【摘要】微机电系统(MEMS)陀螺精度较低,严重影响制导火箭弹惯导系统的精度.为了减小MEMS陀螺的随机漂移,提高其精度使其满足简易制导火箭弹的精度要求,需要对陀螺信号进行滤波,MEMS陀螺随机漂移建模与补偿是其中的难点.针对上述问题,提出采用自回归移动平均(ARMA)分析的方法建立MEMS陀螺随机漂移模型,然后基于此模型对随机漂移信号进行卡尔曼(Kalman)滤波.对某MEMS陀螺在静止条件下的观测信号的滤波效果表明,ARMA模型拟合度高,能准确描述MEMS陀螺随机漂移特性;Kalman滤波方法能有效减小随机漂移误差,提高MEMS陀螺的精度,对提高简易制导火箭弹的精度具有一定的参考价值.
【总页数】5页(P68-72)
【作者】杨庆辉;杜红英;陈雄;周长省
【作者单位】南京理工大学机械工程学院,江苏南京210094;晋西工业集团有限责任公司技术中心,山西太原030027;南京理工大学机械工程学院,江苏南京210094;南京理工大学机械工程学院,江苏南京210094
【正文语种】中文
【中图分类】TJ765.4
【相关文献】
1.微机电系统陀螺仪随机漂移误差建模与滤波研究 [J], 宋吉磊;吴训忠;郭铃
2.光纤陀螺随机漂移建模与卡尔曼滤波器设计 [J], 李辉;谷宏强;李洪儒
3.基于ARMA模型和狼群算法的陀螺随机漂移建模研究 [J], 来凌红
4.卡尔曼滤波在陀螺仪随机漂移中的应用 [J], 陆芳;刘俊
5.基于时间序列分析的MEMS陀螺仪随机漂移建模研究 [J], 包书怡;袁心仪因版权原因,仅展示原文概要,查看原文内容请购买。
常见的陀螺仪性能指标与解释零偏零偏,又称为零位漂移或零位偏移或零偏稳定性,也可简称零漂或漂移率,英文中称为drift或bias drift。
零偏应理解为陀螺仪的输出信号围绕其均值的起伏或波动,习惯上用标准差(σ)或均方根(RMS)表示,一般折算为等效输入角速率(°/ h)。
在角速度输入为零时,陀螺仪的输出是一条复合白噪声信号缓慢变化的曲线,曲线的峰-峰值就是零偏值(drift),如图2-6所示。
在整个性能指标集中,零偏是评价陀螺仪性能优劣的最重要指标。
分辨率陀螺仪中的分辨率是用白噪声定义的,如图2-6 中所示,可以用角随机游走来表示,可以简化为一定带宽下测得的零偏稳定性与监测带宽的平方根之比,其单位为((°)ℎ−1)√Hz⁄。
角度随机游走表征了长时间累积的角⁄,或简化为(°)√ℎ度误差。
角随机游动系数反映了陀螺在此处键入公式。
的研制水平,也反映了陀螺可检测的最小角速率能力,并间接反映了与光子、电子的散粒噪声效应所限定的检测极限的距离。
据此可推算出采用现有方案和元器件构成的陀螺是否还有提高性能的潜力。
标度因子标度因子是陀螺仪输出量与输入角速率变化的比值,通常用某一特定的直线斜率表示,该斜率是根据整个正(或负)输入角速率范围内测得的输入/输出数据,通过最小二乘法拟合求出的直线斜率。
对应于正输入和负输入有不同的刻度因子称为刻度因子不对称,其表明输入输出之间的斜率关系在零输入点不连续。
一般用刻度因子稳定性来衡量刻度因子存在的误差特性,它是指陀螺在不同输入角速率情况下能够通过标称刻度因子获得精确输出的能力。
非线性往往与刻度因子相关,是指由实际输入输出关系确定的实际刻度因子与标称刻度因子相比存在的非线性特征,有时还会采用线性度,其指陀螺输入输出曲线与标称直线的偏离程度,通常以满量程输出的百分比表示。
动态范围陀螺在正、反方向能检测到的输入角速率的最大值表示了陀螺的测量范围。
该最大值除以阀值即为陀螺的动态范围,该值越大表示陀螺敏感速率的能力越强。
陀螺加表随机游走计算公式篇一:陀螺加表是一种广泛应用于机器人导航和运动控制的技术,具有旋转和加速度计等传感器,能够捕捉陀螺仪和加速度计的测量值。
在机器人导航和运动控制中,陀螺加表随机游走是一种随机漫步的过程,通常用于模拟机器人在不同位置和方向上的运动。
陀螺加表随机游走的计算公式可以基于以下两个假设:1. 陀螺加表传感器的精度非常高,测量值非常接近真实值。
2. 机器人在一段时间内处于稳定状态,即其运动状态不会随时间变化而发生变化。
基于这两个假设,陀螺加表随机游走的计算公式可以表示为:设 $x_t$ 为陀螺加表在时间 $t$ 时的测量值,$a_t$ 为陀螺加表的加速度,$b_t$ 为陀螺加表的旋转角度,$f_t$ 为陀螺加表的积分速度,$D_t$ 为陀螺加表的传感器读数。
陀螺加表随机游走的过程可以表示为:$$x_t = x_{t-1} + a_t + b_t cos(2pi f_t) + D_t$$其中,$x_{t-1}$ 为陀螺加表在时间 $t-1$ 时的测量值,$a_{t-1}$ 为陀螺加表的加速度,$b_{t-1}$ 为陀螺加表的旋转角度,$f_{t-1}$ 为陀螺加表的积分速度,$D_{t-1}$ 为陀螺加表的传感器读数。
根据上述公式,我们可以计算出陀螺加表在不同时间点的随机游走轨迹。
例如,假设机器人在 $t=0$ 时位于位置 $x=0$,在 $t=1$ 时位于位置 $x=1$,在$t=2$ 时位于位置 $x=2$,则机器人在 $t=0$ 到 $t=2$ 期间的随机游走轨迹可以表示为:$$[0, 1, 2]$$此外,我们还可以使用上述公式来模拟机器人在不同位置和方向上的运动。
例如,假设机器人在 $t=0$ 时位于位置 $x=0$,在 $t=1$ 时位于位置 $x=1$,在$t=2$ 时位于位置 $x=2$,在 $t=3$ 时位于位置 $x=3$,则机器人在 $t=0$ 到$t=3$ 期间的随机游走轨迹可以表示为:$$[0, 1, 2, 3]$$通过使用上述公式,我们可以计算出机器人在不同时间点的随机游走轨迹,并模拟机器人在不同位置和方向上的运动。
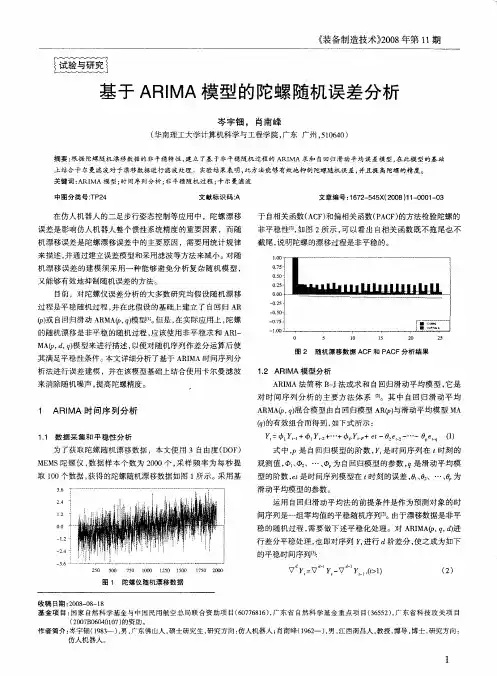
光纤陀螺随机漂移的补偿方法研究作者:汪徐胜,张瑞民,信东,李冰来源:《现代电子技术》2009年第12期摘要:在研究高精度光纤陀螺时,尤其是在捷联惯性导航系统中,随机误差是光纤陀螺误差中不可忽视的部分,对光纤陀螺随机误差的补偿就显得非常必要。
这里基于对光纤陀螺随机漂移建模的方法,首先采用ARIMA方法对光纤陀螺仪随机漂移进行建模;然后采用强跟踪卡尔曼滤波器进行滤波补偿,并利用实测数据进行了实验验证。
实验结果证明,这种方法能够较好地补偿光纤陀螺的随机漂移。
关键词:光纤陀螺;捷联惯性导航系统;随机误差;卡尔曼滤波器;自适应滤波器中图分类号:TP274文献标识码:A文章编号:1004-373X(2009)12-095-04Research of Compensation Method for Stochastic Shifting of Fiber Optic GyrosWANG Xusheng1,ZHANG Ruimin1,XIN Dong1,3,LI Bing2(1.The Second Artillery Officer School,Qingzhou,262500,China;2.The Second Artillery Officer Stationed in the Forth Space Flight Academe,Xi′an,710025,China;3.The Second Artillery Engineering College,Xi′an,710025,China)Abstract:When doing research in optical fiber gyros,especially in strapdown inertial navigation system,stochastic error is an assignable part of the errors of optical fiber gyros.It is very necessary to compensate stochastic error of optical fiber gyros.Basing on the first method,the article builds a model for the stochastic shifting,then adopts strong tracing Kalman filter to filter and compensate.At last,the methods are testified by experimental data.The results prove that the method is effective.Keywords:optical fiber gyros;strapdown inertial navigation system;stochastic error;Kalman filter;self-adapting filter0 引言在惯性技术中,通常将惯性敏感元件的误差模型分为静态误差模型、动态误差模型和随机误差模型三类[1,2]。
陀螺角度随机游走误差对旋转惯导系统的影响报告随着科技的不断进步,旋转惯导系统被越来越广泛地应用于各种领域,在航空航天、导航、地质勘探等领域中得到了广泛的应用。
旋转惯导系统的核心是陀螺仪,它具有高精度、高灵敏度和长时间的稳定性等特点,可精确测量物体的角速度和角度,在导航和定位中扮演着至关重要的角色。
然而,在实际应用中,陀螺仪的精度并非完全可靠。
由于诸多因素的干扰,例如摩擦力、温度变化等,会导致陀螺仪在测量时产生一定程度的误差,尤其是陀螺仪的角度随机游走误差,这对旋转惯导系统的测量精度和稳定性有着很大的影响。
陀螺角度随机游走误差是由于陀螺仪自身的结构和制造工艺等因素所导致的。
它表示为陀螺仪在某一时刻所测量的角速度与其在前一时刻的角速度之差,与时长成正比。
当研究陀螺角度随机游走误差对旋转惯导系统的影响时,需要考虑其对系统的精度和稳定性造成的影响。
一方面,陀螺角度随机游走误差会导致旋转惯导系统的测量精度下降。
由于陀螺仪的工作原理是通过测量物体的角速度来确定物体的角度变化,因此陀螺角度随机游走误差会影响系统准确地对物体进行角度测量。
当误差较大时,会出现较大的偏差。
如果误差无法得到较好地校正,最终会影响到整个旋转惯导系统的使用效果。
另一方面,陀螺角度随机游走误差还会导致旋转惯导系统的稳定性降低。
由于陀螺角度随机游走误差是随着时间不断累积的,因此它会对系统的稳定性产生重大影响。
当误差达到一定程度时,陀螺仪的输出将失去准确性,导致系统不再可靠,可能会产生反效果或无法正常工作。
综上所述,陀螺角度随机游走误差对旋转惯导系统的影响是不可忽视的。
在实际应用中,需要对陀螺仪进行适当的校准和调试,以尽可能减小其产生的误差。
同时还需要建立完善的误差模型和校正方法,以保证旋转惯导系统的精度和稳定性达到最佳水平。
陀螺角度随机游走误差对旋转惯导系统的影响非常重要,因此需要进行相关数据的分析。
以下是一些相关的数据:- 陀螺角度随机游走误差:通常用标准差来衡量,单位为度/小时的平方根。