第五章驾驶员模型_9118022
- 格式:pdf
- 大小:564.06 KB
- 文档页数:45
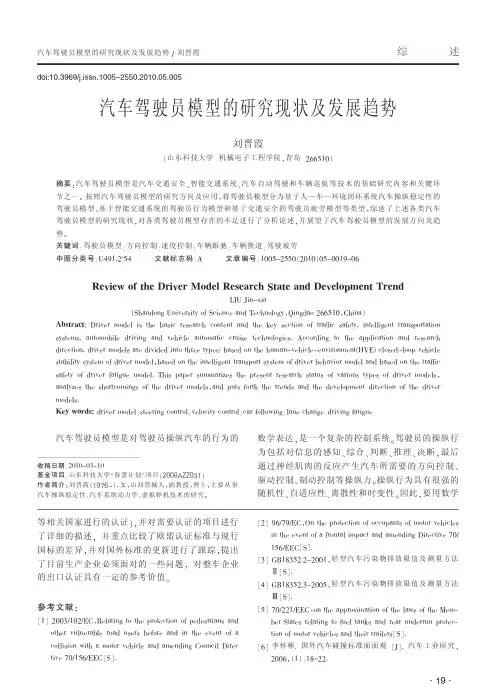
基于驾驶员转向模型的共享控制系统田彦涛 1, 2赵彦博 1谢 波1摘 要 针对车辆驾驶对于共享控制系统实用性的需求, 提出了基于驾驶员转向模型的共享控制系统. 基于驾驶员的视觉预瞄特性与神经肌肉特性建立了驾驶员转向模型, 通过遗传算法辨识模型参数并分析其与车速和道路曲率之间的函数关系;采用模糊权重分配策略合理分配驾驶权重; 本文利用基于所开发的CarMaker 驾驶模拟实验平台, 对系统进行在线测试和验证, 结果表明该系统不仅能够更好地提升车辆的轨迹跟踪精度和安全性, 辅助驾驶员转向, 还能够极大地减轻驾驶员负荷.关键词 神经肌肉系统, 驾驶员模型, 共享控制, 参数辨识引用格式 田彦涛, 赵彦博, 谢波. 基于驾驶员转向模型的共享控制系统. 自动化学报, 2022, 48(7): 1664−1677DOI 10.16383/j.aas.c190486Shared Control System Based on Driver Steering ModelTIAN Yan-Tao 1, 2 ZHAO Yan-Bo 1 XIE Bo 1Abstract Aiming at the practicality demand of shared control system for vehicle driving, a shared control system based on driver steering model is proposed. Firstly, a driver steering model is established based on the driver 's visu-al preview and neuromuscular characteristics. The parameters of the model are identified by genetic algorithm and the functional relationship between the model parameters and vehicle speed and road curvature is analyzed.Secondly, fuzzy weight distribution strategy is used to assign driving weights. Finally, the system is tested and val-idated on-line based on CarMaker simulation platform. The results show that the system can not only help the driver to improve the steering behavior, the accuracy of trajectory tracking and the safety of driving vehicle, but also greatly reduce the driver load.Key words Neuromuscular system, driver model, shared control, parameter identificationCitation Tian Yan-Tao, Zhao Yan-Bo, Xie Bo. Shared control system based on driver steering model. Acta Auto-matica Sinica , 2022, 48(7): 1664−1677众所周知, 自动驾驶分为5个阶段, 分别是辅助驾驶系统、部分自动驾驶、有条件的自动驾驶、高度自动驾驶、完全自动驾驶. 有一部分专家跳过人机共享控制的过程, 直接对无人驾驶进行研究,2013年, 姜岩等[1]提出基于微分约束的横纵向协同规划算法, 用高阶多项式模型在预瞄距离内对可行驶曲线进行建模, 横向规划算法提供横向安全性,纵向规划算法保证了纵向安全性, 最终能够实现封闭环境下速度低于 40 km/h 的无人驾驶. 2017年,田涛涛等[2]提出了一种基于无模型自适应控制的无人驾驶汽车横向控制方案, 其实际是运用了预瞄偏差角构成横向控制的数据模型, 从而避免了对无人车复杂模型的建模, 进而设计自适应算法, 该方法对复杂的无人驾驶运行有较好的自适应性. 一定环境条件限制下的无人驾驶研究得到了较快的发展,但是当前驾驶的现实情况下是无法忽略驾驶员的,则本文着重考虑人机共驾的共享控制过程.共享控制的应用广泛, 可应用于飞行领域、车辆驾驶领域、智能轮椅领域以及机器人等领域[3−8],以车辆驾驶为例, 当前无人驾驶存在安全性和可靠性无法保障的问题时, 共享驾驶在目前汽车行业发展过程中能够发挥其积极的作用[9−11]. 因此, 在保证车辆行驶安全性的基础上, 如何合理分配二者的驾驶权重以及优化共享系统的性能是共享控制的核心问题[12−14]. 2004年, Griffiths 等[15] 较早地针对人机共享控制问题展开研究并取得了一定的研究成果,其研究结果表明通过对驾驶员进行触觉辅助能够提高驾驶精度、减轻驾驶员负担, 但是其未考虑当驾驶员与控制器发生控制冲突时, 应该如何有效分配控制权. 2016年, Erlien 等[16−17]提出了基于模型预测的避障预测触觉反馈控制方案, 系统引入安全驾驶包络的概念, 使得系统能够包容不同的驾驶风格,收稿日期 2019-06-26 录用日期 2020-02-23Manuscript received June 26, 2019; accepted February 23, 2020国家自然科学基金(U1664263, U19A2069)资助Supported by National Natural Science Foundation of China (U1664263, U19A2069)本文责任编委 张俊Recommended by Associate Editor ZHANG Jun1. 吉林大学通信工程学院 长春 1300222. 吉林大学仿生工程教育部重点实验室 长春 1300221. College of Communication Engineering, Jilin University,Changchun 1300222. Key Laboratory of Bionic Engineering of Ministry of Education, Jilin University, Changchun 130022第 48 卷 第 7 期自 动 化 学 报Vol. 48, No. 72022 年 7 月ACTA AUTOMATICA SINICAJuly, 2022大大降低了人机之间不必要的控制冲突. 2018年, Nguyen等[18]提出了一种新的共享控制方法用于车道保持系统, 该方法能够合理地分配驾驶员与控制器的驾驶权, 并且能够有效降低两者之间的冲突,但其缺乏对驾驶员不同驾驶状态下的人机共享的讨论. 2019年, Ji等[19]提出了一种基于随机博弈的共享控制框架, 从而有效地模拟驾驶员与智能系统之间的转向力矩, 该框架下博弈的合理性得到了有效的验证. 本文则从驾驶员的角度出发, 在并联方式的间接共享控制的结构下, 建立驾驶员转向操控模型, 并利用遗传算法辨识驾驶员模型参数, 可以得到一个与驾驶员特性相近的模型, 其合理性得到验证, 在辨识出相关参数后, 将其作为共享控制器应用至共享控制系统, 同时对驾驶员不同驾驶状态下的人机共享控制作进一步分析, 从而能够得到该模型能够有效增加驾驶精度, 减轻驾驶员的驾驶负荷.本文的主要贡献有: 1) 针对驾驶员转向模型的参数辨识问题, 本文采用遗传算法对驾驶员转向模型的视觉预瞄参数、补偿参数与神经肌肉系统参数进行辨识, 获得了很好的拟合效果; 2) 针对车辆与道路曲率变化对驾驶员模型参数的影响, 本文基于上述辨识方法进一步分析不同车速和道路曲率下驾驶员模型参数的变化情况, 并建立了驾驶员神经肌肉系统相关参数与车速之间的函数关系, 以达到增加驾驶员模型参数适用范围的目的; 3) 针对驾驶员不同驾驶状态下的人机共享问题, 本文将已辨识的理想驾驶员模型应用至共享系统, 并基于模拟驾驶实验平台对共享系统进行在线实验, 实验结果说明该系统能够在不同的驾驶员转向操作下保证车辆行驶的安全性与轨迹跟踪的精确性, 同时能够减轻驾驶员的驾驶负荷.本文结构安排如下: 第 1 节对驾驶员转向行为进行描述并对驾驶员转向行为进行建模; 第 2 节分别对实验场景与驾驶员状态信息进行采集, 并对第 1节得到的驾驶员转向模型进行参数辨识; 第 3 节给出仿真实验结果, 并对结果进行分析; 第 4 节得出结论.1 驾驶员转向模型建立借鉴文献[20]并联方式的间接共享控制结构,如图1 所示, 驾驶员与控制器分别作用于转向角权重分配, 综合作用于车辆.1.1 视觉预瞄、补偿与传递延迟本文使用基于两点预瞄特性与神经肌肉系统的驾驶员转向模型结构[21], 主要包括视觉预瞄模块、视觉补偿模块和神经肌肉模块, 如图2 所示. 该模l f l nR t R vθfθn型可简化为两点预瞄模型[22], 如图3 所示. 图3中近预瞄点用来计算车辆与道路中心线的偏差距离,远预瞄点用来估算前方道路的曲率大小. 在图3中,代表远预瞄点与车辆距离, 代表近预瞄点与车辆距离, 代表转弯中心到远预瞄点的距离,代表车辆的转弯半径; 因此可以得到, 远预瞄点处的偏差角与近预瞄点处的偏差角可表达为[22]y LφL θf G pθnG c G p G c式 (2) 中, 预瞄侧向偏差为, 车辆航偏角为,是视觉预测模块的输入, 是视觉补偿模块的输入, 和分别表达为[22]G p=K p(3)K pK c v T LT I e−τp s其中, 预测模块的比例增益为, 补偿模块的比例增益为, 车辆行驶速度为, 补偿速率为, 补偿频带为. 时间延迟可以用纯滞后环节进行表达, 为提高模型的通用性, 对此采用一阶泰勒近似, 即图 1 间接共享控制结构图Fig. 1 Indirect shared control structure图 2 驾驶员转向结构示意图Fig. 2 Driver steering structure7 期田彦涛等: 基于驾驶员转向模型的共享控制系统1665肌肉系统进行建模与分析.1.2 神经肌肉模型G Na G Nf G NM 本文借鉴了英国剑桥大学的 Pick 等[23−24]的肌电分析方法得到了肌电信号与转向力矩的关系, 以及清华大学刘亚辉等[25]提出的驾驶员神经肌肉收缩以及物理变化过程的一些研究结论, 从而搭建神经肌肉系统的传递函数模型. 该模型由前馈 、反馈 与神经肌肉动力 三个部分构成, 如下所示[22]:G Na =K r ×v (6)G Nf =K t (7)K r v T N K t ˆδsw δsw Γs Γd 其中, 是力矩与转角间的比例系数; 是车辆的纵向速度; 是神经肌肉的时间因子; 是转向角偏差的比例因子. 综上所述, 驾驶员模型的传递函数如图4. 其中 代表驾驶员意图产生方向盘转角, 代表反馈的方向盘转角, 代表反馈力矩, 代表模块输出力矩. 为了方便参数辨识过程,将驾驶员模型的传递函数改写为驾驶员转向模型的状态空间形式:x 1x 2x 3其中, , , 是传递函数转换成状态空间过程中产生的中间变量, 是输入输出之间的一种线性组合.2 参数辨识2.1 实验场景与驾驶员状态信息采集本文着重考虑转弯时的转向特性, 建立双向单车道如图5 所示, 其中, 路面坡度为 0, 附着系数设为 1, 长度为 3 m, 两线间隔为 6 m, 单侧道路宽度为 3.5 m.22]图 5 模拟驾驶实验场景Fig. 5 Driving simulation experiment scenario1666自 动 化 学 报48 卷90◦v 道路的俯视图如图6 所示, 由直线段和半径分别为200 m 、300 m 的 弯道组成实验道路, 采用内置的车辆模型, 由于现有的设备与方法还暂时无法检测出驾驶员视觉感知的远预瞄点和近预瞄点误差的真实值, 因此, 根据文献[22]的论述, 本文选取车辆前方行驶路径中心 5 m 远处为近预瞄点, 车辆前方道路间隔线 10 m 远处为远预瞄点. 其次, 为了便于模型参数的辨识, 本文将每次实验中车辆的行驶速度 设定为常数. 因此, 实验时车速为 72 km/h,转弯半径为 200 m.OR = 200OR = 200OR = 300O R = 300R = 300O4002002008001 200图 6 模拟驾驶实验场景 (单位: m)Fig. 6 Driving simulation experiment scenario (unit: m)2.2 驾驶员转向模型参数辨识为了研究驾驶员转向特性, 只选取弯道路况数据, 数据集截取各个变量 800 ~ 2 200 之间的 1 400个数据点, 驾驶员力矩数据序列滤波后如图7 所示.2004006008001 0001 2001 400−101234567数据序列原始数据滤波后数据图 7 驾驶员力矩滤波与截取Fig. 7 Filtering and interception of driver torque可以看出滤波后的曲线更加平滑. 遗传算法与传统算法相比较具有能够求出优化问题的全局最优解、优化结果与初始条件无关、具有较强的鲁棒性和适合于求解复杂的优化问题等诸多优点,故本文选用遗传算法对模型参数进行辨识.基于实验并结合文献[26]给出的参数大致取值范围, 遗传算法的主要参数取值如表1 所示.表 1 遗传算法主要参数取值Table 1 Value of main parameters of genetic algorithm序号参数取值1种群个数1 5002染色体基因数(待辨识参数个数)83交叉概率0.84变异概率0.15最大迭代次数1 0006选择操作的算法选取“轮盘赌”选择法将 8 个待辨识参数看作遗传基, 采用实数编码方法, 故可将其表示为本文为了使驾驶员真实值与模型输出值的总体误差最小, 将目标函数定义为误差函数的 1/2, 即e i =δi sw −˜δi sw(i =1,2,···,N )J X 其中, 代表每一个数据点处的辨识误差, 代表整体的辨识误差. 为使个体 接近最优点, 将适应度函数定义为整体的辨识误差的倒数.其取值范围的上限与下限分别设置为X max =[6,50,50,8,5,5,40,0.3](14)因为采集的数据为离散序列, 式 (9) 和 (10) 的驾驶员模型数据变化是连续的, 所以需要对采集数据进行离散处理, 即I T =0.02s 其中, 代表三阶单位矩阵, , 代表采样周期. 目标函数值在车速为 72 km/h 时的迭代寻优曲线如图8 所示, 最小值为 0.891, 驾驶员力矩的真实输出曲线与辨识模型输出曲线的拟合程度如图9所示.可以看出, 驾驶员真实值的变化与最优个体的模型输出值的变化基本一致, 则模型参数的最优个体取值为7 期田彦涛等: 基于驾驶员转向模型的共享控制系统1667为了更好地验证模型的准确性, 截取第2段弯道来验证模型性能, 车速仍为 72 km/h, 验证结果如图10 所示.图 10 驾驶员力矩测量值与模型输出值对比Fig. 10 Comparison of measurement and modeloutput value of driver torqueSSE =1.784MSE =0.0013RMSE =0.036可以看出, 驾驶员真实值与模型输出值变化趋势几乎一致. 最大力矩误差值为 0.298 N·m, 如图11所示, 力矩误差的和方差 , 均方差, 均方根 .为了进一步分析不同车速、道路曲率下驾驶员模型参数的变化情况, 分别将转弯半径设为 200 m 和 300 m, 采集多组驾驶员在 54 km/h, 63 km/h,72 km/h, 90 km/h, 108 km/h, 126 km/h 下的参数变化情况, 变化结果分别如表2和表3所示.表 2 转弯半径为200 m 的驾驶员模型参数Table 2 Driver model parameters with turningradius of 200 mv (km /h )K pK cT IT LτpK rK tT N541st0.1418.67 1.760.270.620.2811.320.012nd 0.1122.49 1.870.210.680.3011.110.013rd0.1220.57 1.680.280.580.2012.050.01均值0.1220.58 1.770.250.630.2611.490.01631st 0.2114.23 1.680.180.580.2513.470.012nd 0.1715.88 2.070.290.610.3112.990.013rd0.1519.53 1.730.330.660.2913.380.01均值0.1816.55 1.830.270.620.2813.280.01721st0.2515.05 1.990.200.590.3815.090.012nd 0.1716.02 2.250.210.690.3514.960.013rd0.3312.77 1.960.260.630.2615.430.01均值0.2514.61 2.070.220.640.3315.160.01901st0.2110.52 2.480.170.910.118.490.012nd 0.1110.37 2.140.98 1.240.1118.190.013rd0.2410.21 3.380.78 1.640.1818.250.01均值0.1910.37 2.670.64 1.260.1318.310.01K c K t 为了对数据进行更加直观的分析, 将表2 和表3数据分别制作成图表的形式, 如图12 和图13 所示, 可以看出, 车速和视觉补偿增益 是反比例关系, 车速与驾驶员神经肌肉系统反馈刚度 是正比例关系.K t K r T N K t 而车速分别在 72 km/h 和 90 km/h 且转弯半径不同的情况下, 无明显变化. 另外在当前实验情况下变化不明显, 也基本保持不变, 约为 0.01.可见转弯半径对参数变化影响不大. 因此本文主要讨论 与速度的关系, 相关参数的误差指标如表4图 8 目标函数值(v = 72 km/h, R = 200 m)Fig. 8 Value of objective function(v = 72 km/h, R = 200 m)图 9 驾驶员力矩测量值与辨识值对比(v = 72 km/h, R = 200 m)Fig. 9 Comparison of measurement and identificationvalue (v = 72 km/h, R = 200 m)图 11 驾驶员力矩误差值Fig. 11 Error value of driver torque1668自 动 化 学 报48 卷和表5 所示.K t v 当转弯半径为 200 m 时, 利用 与车速 的数据进行一次曲线拟合. 拟合范围即速度的变化范围, 拟合函数如式 (18), 拟合曲线如图14所示. 由图14得, 曲线的拟合精度达到 99.82%, 和方差为0.045.当转弯半径为 300 m 时, 拟合函数如式 (19),拟合曲线如图15, 曲线拟合精度达到 99.15%, 和方表 3 转弯半径为300 m 的驾驶员模型参数Table 3 Driver model parameters with turningradius of 300 mv (km /h )K pK cT IT LτpK rK tT N721st0.0529.88 1.560.570.790.2415.280.012nd 0.1129.95 1.110.890.640.1415.610.013rd0.0929.57 1.380.640.580.1115.080.01均值0.0829.80 1.350.700.670.1615.320.01901st0.0923.42 1.55 1.130.850.1618.680.012nd 0.0623.57 1.180.970.690.1318.920.013rd0.1324.05 1.040.780.630.2118.420.01均值0.0923.68 1.260.960.720.1718.670.011081st0.1221.720.970.81 1.170.3121.160.012nd 0.1822.290.920.94 1.220.4421.200.013rd0.1423.520.820.86 1.150.6121.060.01均值0.1522.510.900.87 1.180.4521.140.011261st0.0321.860.53 2.69 1.190.1324.580.012nd 0.0520.260.48 2.14 1.110.1825.210.013rd0.0819.170.39 3.050.890.3325.860.01均值0.0720.430.47 2.63 1.060.2125.220.01表 4 驾驶员模型的辨识误差指标(R = 200 m)Table 4 Identification error index of drivermodel (R = 200 m)v (km/h)和方差 SSE 均方差 MSE 均方根 RMSE 采样点个数541st1.5350.00080.02921 8002nd 1.9390.00110.03281 8003rd 1.8650.00100.03211 800均值 1.7790.00090.03141 800631st1.8360.00110.03381 6002nd 1.6760.00100.03241 6003rd 1.9780.00120.03521 600均值 1.8300.00110.03381 600721st1.7840.00130.03561 4002nd 1.2850.00090.03001 4003rd 1.7680.00120.03551 400均值 1.6120.00110.03371 400901st6.4880.00650.08051 0002nd 5.0640.00510.07121 0003rd 6.7800.00680.08231 000均值6.1110.00620.07801 000K p K c K l T L τp K r K t 0.1220.58 1.770.250.630.2611.490.1816.55 1.830.270.620.2813.280.2514.61 2.070.220.640.3315.160.1910.372.670.641.260.1318.3154 km/h 63 km/h 72 km/h 90 km/h图 12 不同车速下模型参数平均值对比(R = 200 m)Fig. 12 Comparison of mean values of model paramet-ers at different vehicle speeds (R = 200 m)K K T τK K 72 km/h 90 km/h 108 km/h 126 km/h图 13 不同车速下模型参数平均值对比(R = 300 m)Fig. 13 Comparison of mean values of model paramet-ers at different vehicle speeds (R = 300 m)图 14 转弯半径为200 m 时神经肌肉反馈刚度与车速的拟合曲线K t Fig. 14 Fitting curve of and v at turningradius of 200 m7 期田彦涛等: 基于驾驶员转向模型的共享控制系统1669差为 0.4432. 可见式 (19) 的拟合度相对较低, 这可能是由于参数辨识精度不高或模型的非线性造成的.由于在车速变化的情况下存在采样的数据点也在变化的问题, 为了解决采样数据点变化的问题,本文采用数据的均方差和均方根误差来进行分析.如图16 所示, 模型的辨识误差随着车速的增加而增加. 同样也表明速度在 54 ~ 72 km/h 的范围内时, 模型的辨识误差小, 此时驾驶员的转向行为更加平稳.54 km/h 63 km/h 72 km/h 90 km/h均方差 MSE 均方根 RMSE图 16 不同车速下驾驶员模型辨识误差指标对比(R = 200 m)Fig. 16 Comparison of driver model error index atdifferent vehicle speeds (R = 200 m)当车速为 90 km/h 时, 模型辨识误差显著增加, 说明驾驶员的转向行为表现较差. 图17 进一步验证了速度较高模型辨识误差大的结论. 另外, 随着转弯半径增大, 会使模型辨识误差减小, 即驾驶员的转向行为变得稳定.3 仿真实验与结果分析L D ∆φcd 这里沿用了文献[20]中所提出的模糊权重分配策略, 该策略主要负责根据输入变量(横向偏离程度 与转向角精确程度 ) 的变化实现转向角权重值的合理自适应分配. 其变化规则如下:L D 1) 相同时, 控制器控制权随着转向角精确度的增加而逐渐减小;L D 2) 当控制器转向角更精确且转向角精确度相同时, 越大控制器控制权越大;L D 3) 当驾驶员转向角更精确且转向角精确度相同时, 越大控制器控制权越小;4) 当控制器与驾驶员转向角相等, 控制器控制权保持不变.最终输出便是合理的权重分配系数, 进而得到期望转向角, 其具体表达为k d +k c =1(20)901st2.5440.00160.03991 6002nd 1.2690.00080.02821 6003rd 2.5030.00160.03951 600均值 2.1050.00130.03591 6001081st4.1940.00290.05471 4002nd5.3140.00380.06161 4003rd 4.2340.00300.05501 400均值 4.5810.00320.05711 4001261st29.3400.02450.15641 0002nd 33.1800.02770.16631 0003rd 16.9240.01410.11881 000均值26.4810.02210.14721 000图 15 转弯半径为300 m 时神经肌肉反馈刚度与车速的拟合曲线K t Fig. 15 Fitting curve of and v at turningradius of 300 m72 km/h 90 km/h 108 km/h 126 km/h均方差 MSE 均方根 RMSE图 17 不同车速下驾驶员模型辨识误差指标对比(R = 300 m)Fig. 17 Comparison of driver model error index atdifferent vehicle speeds (R = 300 m)1670自 动 化 学 报48 卷θsw =k c ×θc +k d ×θd(21)k c k d 其中, 是控制器权重, 是驾驶员权重. 由此能够更好地验证驾驶员模型, 并且能够有效地进行在线共享控制实验, 获取相关特性.3.1 理想驾驶员模型参数选取驾驶员模型结构简单, 辨识精度高, 本文的目的是基于驾驶员转向模型设计共享控制器, 以满足驾驶员与控制器共享控制的需求. 因此, 本文的理想驾驶员采用 CarMaker 的内置驾驶员模型. 采集转弯半径为 200 m, 车速分别为 54 km/h, 63 km/h,72 km/h, 83 km/h 和 94 km/h 时的理想转向数据, 从而得到神经肌肉反馈刚度与车速的关系. 选取车速为 72 km/h 时的理想驾驶员转向数据, 并利用遗传算法辨识模型参数, 驾驶员转向力矩的真实值与辨识值对比如图18 所示.图 18辨识模型与真实测量转向数据对比Fig. 18 Comparison of identification model andmeasurement value可以看出, 辨识力矩值的拟合程度非常高, 且变化趋势基本一致, 误差非常小, 当前情况下的模型参数为K t 进一步选取车速为 54 km/h, 63 km/h, 83 km/h 和 94 km/h 的理想数据, 并得到相关评价指标, 统计结果如表6 所示, 显然 与车速之间呈近似正比例关系, 根据曲线拟合方法, 拟合范围为实验选取的速度范围, 可得到二者的一次函数关系为K t 如图19 所示, 拟合精度较高, 因此, 本文将利用包含车速的解析形式表示反馈增益 .由于本文驾驶员模型的输出为驾驶员力矩, 所以需要建立转向系统模型, 从而连接驾驶员与模糊权重分配模块. 转向系统传递函数的形式为G sw K gw T z T p 1T p 2其中, 代表转向系统的传递函数, 代表模型增益, 代表函数零点, 和 代表函数极点.转向系统模型参数的辨识结果如图20 所示,可以看出辨识精度较高, 图21 进一步验证了模型的准确性. 可见该模型能够有效描述转向系统, 辨识后的模型可写为表 6 不同车速下的驾驶员模型参数辨识结果Table 6 Identification of driver model parameters at different vehicle speed参数54 (km/h)63 (km/h)72 (km/h)83 (km/h)94 (km/h)K p 0.210.190.140.090.08K c 49.9942.5549.7949.9549.99T i 4.31 3.48 5.11 5.2 3.72T L 0.320.300.340.220.21τp 0.670.670.720.780.68K r 0.320.330.420.520.48K t 11.6613.6815.1216.9518.99T N 0.010.010.010.010.01目标函数0.0930.160.43 1.53 5.06峰值误差0.0370.0490.0820.140.287和方差 (SSE)0.3740.320.86 3.0510.14均方差 (MSE)0.00020.00020.00060.00280.01均方根 (RMSE)0.01440.01410.02480.0530.1平均误差0.0070.0110.0180.030.0797 期田彦涛等: 基于驾驶员转向模型的共享控制系统1671其中, 零点−0.298 与极点−0.31 非常接近, 零极点抵消后的模型为3.2 共享控制系统在线测试与评价3.2.1 共享控制器单独驾驶测试为了讨论控制器对于该模型的表现性能, 首先则对控制器在不同的行驶速度下的转向性能进行实验检测. 本文采用 Simulink 和 CarMaker 联合仿真的方式进行实验, 采用 CarMaker 内置车辆模型,在 Simulink 中搭建控制器. 实验结果如图22 所示,由于道路宽度为3.5 m, 显然当车速为120 km/h 时, 车辆右侧已经驶出道路边界线, 另外, 当车速低于120 km/h 时, 车辆能够有效通过转弯半径为200 m 的弯道.另外, 从图23 看出模型输出力矩随着速度的增加而增加, 从图24 看出方向盘转角也是随着速度的增加而增加, 由此可以得出速度越快, 控制器的控制力度越大, 由此来保证车辆转弯的通过性与安全性. 图25 得到不同车速下车辆的路径跟踪偏差, 可以看到速度越快, 路径跟踪的偏差越大, 当车速小于 94 km/h 时, 车辆的路径跟踪偏差都能够保持在一个较小的范围内.图 23 不同车速下共享控制器的输出力矩Fig. 23 Output torque of shared controller atdifferent vehicle speeds为了更加直观地分析车辆的路径跟踪情况, 将不同车速下路径跟踪偏差的相关指标统计如表7所示, 可以看出, 当车速低于 94 km/h 时, 车辆的路径跟踪的峰值偏差能够保持在 0.23 m 以内, 说图 20 辨识模型值与真实测量值对比Fig. 20 Comparison of identification model value andmeasurement value图 21 已辨识模型的输出值与真实测量值对比Fig. 21 Comparison of the output value of theidentified model with the measured value图 22 不同车速下车辆中心点与道路内边界的距离Fig. 22 Distance between vehicle center point and roadinternal boundary at different vehicle speeds1672自 动 化 学 报48 卷明该控制器能够有效保证车辆的路径跟踪性能.3.2.2 人机共驾在线测试在第3.2.1节中对控制器单独驾驶进行了验证,可见控制器在单独驾驶时能够有效完成路径跟踪任务. 接下来进行半实物的台架实验, 分别采用罗技的实物驾驶单元、CarMaker 软件、MATLAB 完成对双环人机协同驾驶的实验, 进而讨论人机协同驾驶下的车辆的道路跟踪特性以及安全特性. 另外还需要讨论控制器加入人机协同控制是否能够提高车辆的转向精度、优化驾驶员的转向操作、降低驾驶员的驾驶负担.基于以上目标, 我们分别采集驾驶员A 、驾驶员B 、驾驶员C 在人机协同控制中的转向实验数据. 人机共驾测试示意图如图26 所示, 车速设定为65 km/h, 分别让驾驶员A 进行正常的转向操作, 驾驶员B 进行过度转向操作, 驾驶员C 进行欠转向操作. 然后分析不同驾驶员在不同转向模式下的方向盘转向角的变化以及车辆道路跟踪的偏差情况.如图27 所示, 当驾驶员A 在正常转向的情况下, 驾驶员此时的转向操作较为精准, 当经过权重后的输出转向角与驾驶员产生的转向角较为接近,可以得到, 如图28 所示, 如果驾驶员在进行正常转向的情况下且保证车辆的路径跟踪误差在允许的范围内, 共享系统会增加驾驶员的驾驶权重. 从而达到辅助驾驶员进行转向操作的功能. 如图29 所示,驾驶员A 在正常转向的情况下, 车辆的路径跟踪偏差维持在较小的水平, 完全能够满足车辆通过的安全性.当驾驶员B 在过度转向的情况下, 如图30 所示, 驾驶员输出的转向角明显高于正常的转向角水平, 但是, 驾驶员的转向角经过权重后输出的转向角能够保持在正常值的水平. 如图31 可见, 当驾驶员进行过度转向操作的情况下, 控制器的控制权重会增加, 对应的降低了驾驶员的控制权重, 从而达到纠正驾驶员的功能. 如图32 所示, 当驾驶员B 在过度转向的情况下, 共享系统仍旧能够将车辆的跟踪路径偏差维持在安全的范围内. 虽然驾驶员B 比驾驶员A 产生的转向角误差较大, 但是此时控制器的控制权重提升, 以此保证车辆的通过性.当驾驶员C 在转向不足的情况下, 如图33 所示, 驾驶员输出的转向角明显低于正常的转向角水平, 但是, 驾驶员的转向角经过权重后输出的转向角依旧能够将保持在正常值的水平. 此时同样是增加了控制器的控制权重, 从而补偿驾驶员的转向操作. 如图34 所示, 当驾驶员C 在转向不足的情况下, 共享系统能将车辆的跟踪偏差维持在安全值的范围内. 可见, 无论驾驶员是在过度转向还是在转表 7 不同车速下的车辆路径跟踪偏差指标对比Table 7 Comparison of route tracking deviation index at different vehicle speeds类型63 km/h 72 km/h 83 km/h 94 km/h 108 km/h 120 km/h 峰值误差0.270.210.140.230.71 1.36和方差 (SSE)26.613.6 2.6117.12142.47481.2均方差 (MSE)0.0150.0090.0020.0150.1410.523均方根 (RMSE)0.1250.0950.0450.1220.3750.723图 24 不同车速下方向盘的输出转向角Fig. 24 Output steering angle of steering wheel atdifferent speeds图 25 不同车速下车辆的路径跟踪偏差Fig. 25 Vehicle path tracking deviation atdifferent speeds7 期田彦涛等: 基于驾驶员转向模型的共享控制系统1673向不足的情况下, 共享系统都能保证车辆的路径跟踪要求.最后, 本文将讨论共享驾驶相较驾驶员C 单独驾驶的差异. 如图35 所示, 共享驾驶的情况下, 驾驶员产生的转向角小于单独驾驶时驾驶员产生的转向角. 如图36 所示, 共享驾驶的情况下, 驾驶员产图 26 人机共驾测试示意图Fig. 26 Man-machine co-driving test图 27 驾驶员A 正常转向下驾驶员转角与权重后的输出转向角对比Fig. 27 Contrast of driver 's angle with output steering angle after weight under driver A 's normal steering图 28驾驶员A 正常转向下控制器权重的变化Fig. 28 Variation of controller weight underdriver A 's normal steering图29 驾驶员A 正常转向下车辆的路径跟踪偏差Fig. 29 Vehicle path tracking deviation underdriver A 's normal steering图 30 驾驶员B 过度转向下驾驶员转角与权重后的输出转向角对比Fig. 30 Contrast of driver 's angle under driver B over-steering with output steering angle after weighting图 31 驾驶员B 过度转向下控制器权重的变化Fig. 31 Variation of controller weight underdriver B 's oversteering图 32 驾驶员B 过度转向下车辆的路径跟踪偏差Fig. 32 Vehicle path tracking deviation underdriver B 's oversteering。
基于路程预瞄的驾驶员模型杨浩;黄江;李攀;韩中海【摘要】为真实反映驾驶员在人-车-路闭环系统中对汽车的操纵特性,提出了一种基于路程预瞄的智能控制驾驶员模型.通过对一段路程进行预瞄,提出了用于判断目标路径相对于预瞄方向的位置关系的路程预瞄曲率阈值理论,建立了预瞄距离可变的自适应跟踪模型,同时,建立了智能控制转向盘的决策模型,提出了最优速度控制策略.CarSim和Simulink联合仿真结果显示,建立的驾驶员模型具有较高的路径跟踪精度和合理的速度控制策略.【期刊名称】《汽车技术》【年(卷),期】2019(000)002【总页数】7页(P7-13)【关键词】路程预瞄;路程预瞄曲率阈值;预瞄距离可变;模糊控制理论;最优速度控制策略【作者】杨浩;黄江;李攀;韩中海【作者单位】重庆工商职业学院,重庆 401520;重庆理工大学,汽车零部件先进制造技术教育部重点实验室,重庆400054;重庆理工大学,汽车零部件先进制造技术教育部重点实验室,重庆400054;重庆理工大学,汽车零部件先进制造技术教育部重点实验室,重庆400054;重庆理工大学,汽车零部件先进制造技术教育部重点实验室,重庆400054【正文语种】中文【中图分类】U469.71 前言驾驶员行为规律及其建模在人-车-路闭环系统的仿真、评价与优化中具有至关重要的作用。
研究人员根据预瞄理论提出了各种驾驶员模型:MacAdam提出了最优预瞄控制模型[1],郭孔辉院士提出了单点预瞄最优曲率模型[2],张慧豫提出了两点预瞄的新型驾驶员模型[3],同时,汽车动力学仿真软件CarSim中采用了5点预瞄驾驶员模型。
近年来,随着控制理论的不断发展和完善,基于预瞄的各种驾驶员模型不断提出,主要有模糊控制驾驶员模型[4]、预瞄优化神经网络驾驶员模型[5]和自适应最优预瞄控制驾驶员模型[6]。
上述方法在路径跟踪方面取得了一定进展,但并没有充分反映驾驶员的预瞄行为。
郭孔辉院士的研究表明[2],驾驶员预瞄更一般的形式是其目光不只集中于前方一点,而是着眼于前方的一段路,并争取使汽车在这一段路程内的运动误差最小,同时根据路程预瞄的有效信息和当前车速来调整预瞄距离,即预瞄距离应可变。
等相关国家进行的认证),并对需要认证的项目进行了详细的描述,并重点比较了欧盟认证标准与现行国标的差异,并对国外标准的更新进行了跟踪,提出了目前生产企业必须面对的一些问题,对整车企业的出口认证具有一定的参考价值。
参考文献:[1]2003/102/EC ,Relating to the protection of pedestrians andother vulnerable road users before and in the event of a collision with a motor vehicle and amending Council Direc tive 70/156/EEC [S ].[2]96/79/EC ,On the protection of occupants of motor vehiclesin the event of a frontal impact and amending Directive 70/156/EEC [S ].[3]GB18352.2-2001,轻型汽车污染物排放限值及测量方法Ⅱ[S ].[4]GB18352.3-2005,轻型汽车污染物排放限值及测量方法Ⅲ[S ].[5]70/221/EEC ,on the approximation of the laws of the Mem -ber States relating to fuel tanks and rear underrun protec -tion of motor vehicles and their trailers [S ].[6]李怀彬.国外汽车碰撞标准面面观[J ].汽车工业研究,2006,(1):18~22.doi:10.3969/j.issn.1005-2550.2010.05.005汽车驾驶员模型是对驾驶员操纵汽车的行为的数学表达,是一个复杂的控制系统。
驾驶员的操纵行为包括对信息的感知、综合、判断、推理、决断,最后通过神经肌肉的反应产生汽车所需要的方向控制、驱动控制、制动控制等操纵力。

Ξ 收稿日期:2007-11-11基金项目:成都市科技攻关项目(07GGY B256G X 2010).作者简介:李勇(1981—),男,湖北公安人,硕士研究生,主要从事智能交通系统方面的研究. 微观交通仿真中的驾驶员模型Ξ李 勇,何 伟,苏 虎(西南交通大学电气工程学院,成都 610031)摘要:阐述了微观交通仿真中跟驰模型和换道模型在国内外的发展历程和现状,分析了各种跟驰模型各自的特点和存在的不足,介绍了换道模型的可接受间隙法,总结了国内外的研究成果,并提出了新的研究思路.关 键 词:交通仿真;微观交通仿真;驾驶员模型;跟驰模型;换道模型中图分类号:U491 文献标识码:A文章编号:1671-0924(2008)01-0019-05R esearch of Driver Model in Microscopic Traffic SimulationLI Y ong ,HE Wei ,S U Hu(School of E lectrical Engineering ,S outhwest Jiaotong University ,Chengdu 610031,China )Abstract :The development process and existing research in China and other countries of car following m odel and lane changing m odel used in microscopic traffic simulation are presented.The characteristics and defects of various car following m odel are deeply analyzed ,and the spacing accepting m odel of lane changing m odel is als o analyzed.Achievements of diver m odel in traffic simulation are summarized ,and s ome new research ways are put forward.K ey w ords :traffic simulation ;microscopic traffic simulation ;driver m odel ;following m odel ;lane chang 2ing m odel 交通仿真按对交通系统描述细节程度的不同可以分为微观、中观和宏观仿真[1].微观交通仿真的研究对象为单个车辆,其仿真模型特别适合于在计算机上再现路网上的实际交通状况,因此国内外交通学术界均侧重于微观交通仿真技术的应用研究[2].驾驶员模型是交通仿真系统的基本组成部分,可将其分为跟驰模型和换道模型分别加以研究.由于换道模型过于复杂,过去的研究大多集中在跟驰模型.1 跟驰模型 车辆跟驰行为研究是对驾驶员行为研究的重要方面之一,也是交通仿真研究领域的基石.车辆第22卷 第1期V ol.22 N o.1重庆工学院学报(自然科学)Journal of Chongqing Institute of T echnology (Natural Science )2008年1月Jan.2008跟驰模型已被研究了半个多世纪(1950年鲁契尔和1953年派普斯对跟驰过程的研究,标志着跟驰理论解析方法研究的开始).之后,车辆跟驰模型的研究又经历了控制工程、感知和心理学几个阶段.1.1 G M (G eneral M otor )跟驰模型20世纪50年代后期和60年代早期研究的G M 模型是最为著名的模型,其表达式为:a n +1(t +T )=cv mn +1(t +T )Δv (t )Δx l (t )(1)其中:a n +1(t +T )为t +T 时刻第n +1辆车的加速度;v n +1(t +T )为t +T 时刻第n +1辆车的速度;T 为反应时间;Δv (t )为t 时刻第n 辆车与第n +1辆车的速度差;Δx (t )为t 时刻第n 辆车与第n +1辆车的距离;c ,m ,l 为常数.G M 跟驰模型形式简单、物理意义明确,作为跟驰模型研究的早期工作,具有开创意义,许多后期的跟驰理论研究都源于其建立的刺激—反应的基本方程.但在标定m 和l 的过程中存在大量的矛盾,导致这些矛盾的主要原因包括:①根据G M 模型,无论前后车相距多少,前后车都相互影响,这不符合车辆跟驰模型的基本定义;②大量的研究和实验都是在低速度交通运行状态中进行的,而这样的交通流与真实的交通流相差较远;③在前后车速度相等的情况下允许2车的距离为零,这不符合实际交通情况.由于以上3点原因导致G M 模型的通用性欠佳,所以现在很少使用该模型.1.2 线性跟驰模型尽管Chandler ,Herman 和M ontrol [3]所提出的G M 模型在研究的初始阶段是线性的,但是He11y [4]对线性跟驰模型发展的贡献却是不可忽视的.他所提出的新线性跟驰模型考虑了前方2辆车是否制动减速对后车加速度的影响.模型如下所示:a n (t )=C 1Δv (t -T )+C 2(Δx (t -T )-D n (t ))(2)D n (t )=α+βv (t -T )+γa n (t -T )(3)其中:D (t )为期望跟车距离;C 1为Helly 借用先前的研究成果,即通过对14个司机的跟车行为调查,在相关系数大于0.8时,T 的取值范围为0.5s ~2.2s ,C 1的取值范围为0.17~1.3,平均T =0.75,在C 1=0.5的情况下,得到的结果;C 2为通过设置Δv 和Δx ,使前后车的加速度相等,即相对加速度为零.这样就产生最终公式:a =0.5Δv (t -0.5)+0.125(Δx (t -0.5)-D n (t ))(4)D N (T )=20+v (t -0.5)(5)Bekey ,Burnham 和Seo [5]再次利用线性跟驰模型尝试用源自最优控制系统设计的传统模型推导新的跟驰模型.应该注意到线性模型的初始模型就是m =0,l =1的G M 模型,模型形式简单、实用.目前该模型也大量应用在实践中.但线性跟驰模型和G M 模型一样都存在通用性差的弊端.相对于G M 模型,由于考虑到前后车的速度差,线性模型在标定上更加合理.1.3 生理-心理跟驰模型生理-心理模型也称反应点模型(Action P oint M odels ,简称AP 模型).该模型是将刺激抽象为前后车之间的相对运动,包括速度差和距离差的变化.这类模型用一系列阈值和期望距离体现人的感觉和反应,这些界限值划定了不同的值域,并且在不同的值域,后车与前车存在不同的影响关系.生理-心理模型是一种跟驰决策模型.Michaels [6]通过分析司机生理和心理的一些潜在因素,首次提出生理-心理跟驰模型的理念:司机通过分析视野中前车尺寸大小的改变,即前车在司机视觉中投影夹角的变化,感知前后车相对速度的变化,根据公认的感知阈值d/d t (Δv/Δx 2)约为6×10-4,判断是否正在与前车接近,一旦超过这个阈值,司机将选择减速,使对相对速度的感知不超过这个阈值.是否能够感知到前车的变化是后车司机进行任何操作的基础.尽管该模型的集成系统可以合理地仿真司机的行为,但是在标定各个参数和阈值时却不太成功,因此很难来评价这些模型的有效性.但目前该模型的基础毫无疑问与实际最一致,也最能描述大多数我们日常所见的司机行为,因此这种模型以及其衍生的各种模型应用于许多实践中.02重庆工学院学报1.4 基于模糊推理的跟驰模型近些年来在跟车模型的发展过程中,最值得注意的是模糊推理理论在跟驰模型研究中的应用.该模型主要通过推理司机未来的逻辑阶段来研究司机的驾驶行为.K ikuchi和Chakroborty[7]用模糊推理方法来研究跟驰模型的初衷是模糊化传统G M模型中的Δx,Δv和an-1,模糊推理模型的具体表达为: IFΔx=‘ADEQUATE’THE N a nj=(Δv i+a n-1,i xT)/γ(6)其中:T为反应时间,取1s;后车司机希望在γ时间内能够跟上前车,γ取2.5s.该模型说明了模糊推理系统是如何描述跟驰状态的,最为重要的是与传统G M模型相比,该模型具有局部稳定性.从式(6)可以看出,最终的跟车距离仅与最终速度有关而与初始跟车距离和速度无关,尽管该模型在总体上能够预测“反应”的变化,但有2个因素可能导致与实际有出入:一个是该模型认为能够精确地得出a i为0.3m/s2,这可能非常值得探讨;另一个是已经从线性跟车模型中得知Δx对加速度的影响非常小.1.5 安全距离跟驰模型安全距离模型也称防追尾模型(C ollision Av oidance M odels,简称C A模型),该模型最初是由K ometani和Sasaki[8]提出,最基本的关系并非G M 模型所倡导的刺激—反应关系,而是寻找一个特定的跟车距离(通过经典牛顿运动定理推导出).最初模型为:Δx(t-T)=αv2n-1(t-T)+β1v2n(t)+βvn(t)+b0(7)其中α,β,β1,b0都是系数.G ipps[9]对此模型的研究取得了重大突破,他考虑了几个先前研究中忽略的次要因素.自G ipps 提出改进C A模型后,C A模型广泛地应用于计算机仿真中.C A模型之所以能被大量应用,主要原因在于可以用一些对司机行为的一般感性假设来标定模型.大多数情况只需知道司机将采用的最大制动减速度,这样就能满足整个模型的需要.尽管该模型能够得出令人接受的结果,但仍有许多问题有待解决,例如,要验证“安全车头时距”这个参数,可以看到该模型没有一个非常合理的起始点,就像实际中一个司机可以考虑到前方几辆车的情况,根据刚获得的信息来假设这几辆车将采取减速度的大小.1.6 跟驰模型在国内的发展现状我国对车辆的跟驰研究主要集中在理论方面,然而尚未形成体系,研究相对分散,对国内前人的研究缺乏继承性,但通过对我国特有的一些交通流状态的研究,创造性地提出了一些能够解决实际问题的跟驰模型.陈建阳[10]根据现有的非线性跟驰模型和线性跟驰模型,在考虑司机的冒险程度和车辆的加速性能的基础上提出了改进微观跟驰模型.其模型为:a(t+T)=c1f1(v i-1(t)-v i(t))+ c2f2(x i-1(t)-x i()-D(v i(t)))(8) D(v i(t))=b i v2i(t)+b2v i(t)+b3(9)其中:c1,c2,b1,b2,b3为比例常数,b1和车辆加减速性能有关,b2和司机的反应时间有关.除以上模型外,还有其他学者也做了相关的研究[10-14].从理论上分析,这类模型都能解决一定的实际问题,但至少在以下2个方面有欠合理:在正常的车辆跟驰行驶中,无论人、车、路的具体情况如何,都将驾驶员的反应时间作为常数处理,这显然是一种简化处理,人的反应时间不可能是完全一样的;将所有机车赋予同一性能,没有考虑机车的差异性,而不同的机车具有不同的驾驶特性,这样就不能体现出机车特性对道路交通的影响,这一点在交通堵塞中占有重要地位.2 换道模型 根据目前国内外的研究成果,多数专家学者习惯将车辆的车道变换行为分为2类:强制性车道变换和主动性车道变换.车道变换模型描述的内容包括车辆发生车道变换行为的整个过程,即车辆车道变换意图的产生、车道变换的可行性分析、车道变换行为的实施,以及车道变换轨迹的确定[14],其中可行性分析是研究的核心和焦点.12李 勇,等:微观交通仿真中的驾驶员模型2.1 强制换道模型强制性车道变换是指车辆为了完成其正常行驶目的而必须采取的车道变换行为.图1中给出了城市交通中3种最为常见的强制性车道变换的情形.图1中车辆1因为正前方车辆正在停车而阻挡了其在当前车道上继续行驶的路线,因而不得不准备变换至右侧车道;车辆2根据其既定的路线选择必须在前方交叉口左转,因此当它在交叉口进口道上行驶看到前方的车道导向标线时,则要准备向左变换车道;车辆3已接近当前车道结束点,因而也将准备向左变换车道.另外,公交车在接近前方停靠站时从里侧行驶车道转至外侧的公交停靠车道的变道行为也是一种常见的强制性变道行为.图1 强制性车道变换几种常见情形2.2 主动性换道模型主动性车道变换是指车辆为了追求更加自由、更加理想的行驶方式而发生的车道变换行为.这种车道变换与强制性车道变换的主要区别在于:即使车辆不变换车道也能在原车道上完成其行驶任务,因此车道变换不是强制性的.而且主动性车道变换在目标车道大于一条的情况下,往往还有目标车道选择的过程.一般来说,发生主动性车道变换有以下几种原因:1)为了追求更快的车速、更自由的行驶空间而超越前方的低速车辆;2)车辆汇合合时,车辆主动让路;3)为了摆脱其快速驶近的后车的压力,由快车道变换到慢车道.2.3 换道可行性分析换道可行性分析是换道模型研究的重点和难点,最具代表性的是基于G ipps 的可接受间隙模型.可接受间隙模型是基于车辆间临界间隙的预测分布而建立起来的,如图2所示.图2 可接受间隙模型示意图 图2中:d 1为目标车与目标车道后随车之间的临界距离;d 为目标车道前导车和后随车之间的总距离;d 2为目标车与目标车道前导车之间的临界距离;d 3为目标车与当前车道前导车之间的临界距离;d 4为目标车n 的长度.驾驶员对目标车道上对应位置的前后间距进行判断,只有当前后间距均满足时,车辆才可以换道至相邻车道.最小前后车间距因人而异,因交通状况而异,是交通流速度、密度因素的函数.可接受间隙模型简单的表述如下:1)如果当前的前(后)车距小于最小前(后)车距,就拒绝此间距;2)如果当前的前(后)车距大于最小前(后)车距,就接受此间距;3)如果前后间距均被接收,就执行换道操作.作为微观交通仿真的两大重要模型之一,车道变换模型被认为是比较复杂以至难以用数学模型描述的.困扰车道变换模型发展的一个重要原因是微观数据难以获得.要描述车辆换道这样的复杂驾驶行为,大量微观车辆单元信息的支持是小可缺少的.这也是车道变换模型的发展相比于跟驰模型滞后多年的根本原因.3 结束语 在过去的50多年中,各国学者从多个角度建立了相关的跟驰模型和换道模型,其研究结果解决了很多实际问题,达到了一定的预期效果,但是模型适用性还显不足,主要体现在以下3个方面:没能从心理特性角度充分考虑驾驶员自身因素;22重庆工学院学报忽略了驾驶员的感知层;忽略了车辆的差异性,没能综合考虑影响车辆跟驰行为的因素.随着交通科技的进步,驾驶行为将在很大程度上有别于过去,驾驶员模型作为微观交通流仿真中的基础模型,其相关研究必将呈现出内容的细致化、深入化,手段和方法的多样化以及应用的专门化.可以在以下3个方向做进一步研究:①基于人的心理活动建立驾驶员多源信息协同认知综合结构模型;②深入研究影响车辆行驶的刺激因素;③模型的专用化.参考文献:[1] 王彩霞.交通仿真中的换道模型研究[D].长春:吉林大学,2006:2-3.[2] 刘运通.交通系统仿真技术[M].北京:人民交通出版社,2004.[3] Chandler,Herman,M ontroll.T raffic dynamics:studies incar following[J].Operations research,1958,6:165-184.[4] Helly.S imulation of bottlenecks in single lane traffic flow[Z].In posium on theory of traffic flow.Research Laboratories,G eneral m otors,proceedings,1959:207-238.[5] Bekey,Burnham&Seo.C ontrol theoretic m odels of humandrivers in car following[J].Human factors,1977,19(4):399-413.[6] M ichaels.Perceptual factors in car following.In the pro2ceedings of the second international sym posium on the theo2 ry of road and traffic flow[J].OEC D,1963:44-59. [7] K ikuchi,Chakroborty.Car following m odel based on a fuzzyin ference system[J].T ransportation Research Record,1992,1365:82-91.[8] K ometani,Sasaki.Dynamic behavior of traffic with a non2linear spacing2speed relationship[J].G eneral M otors,1998(6):105-119.[9] G ipps.A behavioral car following m odel for com puter simu2lation[J].T ransportation Research B,1981,15:105-111.[10]章三乐,肖秋生,任福田.车辆跟驰理论的实用研究[J].北京工业大学学报,1992,18(3):20-27.[11]陈建阳.交通流微观模型与宏观模型的统一[J].同济大学学报,1997,25(1):46-49.[12]荣建.高速公路基本路段通行能力研究[D].北京:北京工业大学,1999.[13]邹智军.交通仿真系统中的纯微观跟车模型[J].中国公路学报,2002,4(15):12-15.[14]徐英俊.城市微观交通仿真车道变换模型研究[D].长春:吉林大学,2005.(责任编辑 陈 松)(上接第18页)达到满意的控制效果.在此工作的基础上,可以利用Simulink中的另一个重要功能模块Real2T ime W orkshop,直接从所建模型产生出可移植的C语言程序源代码,自动构造出能在多种环境[6](如实时系统和单机仿真)下实时执行的应用程序,从而使得汽车防抱制动系统从设计到实现的过程非常快捷,可大大提高汽车防抱制动控制系统的开发效率.参考文献:[1] 张新.汽车液压防抱死制动系统的理论与实践[M].长沙:中南大学出版社,2005.[2] ST ATEF LOW:F or Use with SI M U LI NK User’s G uide Ver2sion2[M].[S.l]:The M ATHW ORK S,Inc,1999.[3] Real2T ime W orkshop F or Use with SI M U LI NK User’sG uide Version3[M].[S.l.]:The M ATHW ORK S,Inc,1999.[4] Cem Hatipoglu,Amer Malik.S imulation Based ABS Alg o2rithm Development[J].S AE paper,1999(1):3714. [5] 张新.一种软硬件实施无缝连接的车辆控制器集成开发系统研究[J].长沙理工大学学报:自然科学版,2005(1):12-14.(责任编辑 陈 松)32李 勇,等:微观交通仿真中的驾驶员模型。