大角度路径下的单轨车辆驾驶员模型
- 格式:pdf
- 大小:259.30 KB
- 文档页数:4
单轨吊人车结构的优化设计与研究韩俊国【摘要】介绍了原有单轨吊人车的吊车原理以及应力分布形式,并根据力的分析对原有结构进行优化升级,单轨吊人车在优化设计时,改双排座椅为单排座椅,并缩小单轨吊人车的横截面宽度.运用模拟仿真软件Ansys中的Workbench进行优化前后两种吊人车结构图的绘制,并输入相关载荷参数,经过处理后计算对比优化前后等效应变与变形量的大小,验证了优化后的优越性,值得在井下实际运行中推广.【期刊名称】《机械管理开发》【年(卷),期】2019(034)005【总页数】3页(P36-38)【关键词】Ansys;Workbench;单轨吊人车;结构优化;等效应变【作者】韩俊国【作者单位】阳煤集团新景公司运输工区, 山西阳泉045000【正文语种】中文【中图分类】TD355引言单轨吊人车是煤矿井下一种常见的运输设备,可运人、运物,且具有价格低廉、使用方便、体积小、运输效率高、故障少等优点。
为了保障单轨吊人车运人、运物的安全性和稳定性,必须对其结构进行受力分析,并找出最易发生形变破坏的部位,采取针对性的结构优化措施,对重点防护部位进行保护。
除了单轨吊人车自身结构局限性外,还需考虑运行过程中的人机工程学,比如:运行过程中滑轮座的润滑度、紧急停止的缓冲性,以及上车上物的瞬时冲击对单轨吊车的影响、防治与周边轨道的摩擦和碰撞等。
单轨吊车的工作原理是利用滑轮与两对耳座的销连接,将滑轮固定在上方轨道,吊车借助滑轮的运移悬空移动。
所以,分析了吊车的静态结构,不难发现人车框架与设备连接处是最易发生安全事故的部位[1-3] 。
因此,运用有限元软件分析受力和等效应变,针对易发生危险工况的局部结构进行改造升级。
1 单轨吊牵引人车的结构形式分析一般的单轨吊车结构形式大同小异,车身主体主要由人车框架、耳座、联接梁、滑轮构成。
运行过程中主要依靠滑轮在轨道上的滑移将人与车悬空移动,直至送至目的地。
吊车牵引动力主要来源于与联接梁连接的牵引机车,机车负责吊车的启动和制动。
车辆的运动学模型和动⼒学模型系统建模是系统控制的前提和基础,对于⽆⼈车的横向控制(控制车辆转向,使其沿期望路径⾏驶),通过对车辆模型进⾏合理的简化和解耦,建⽴合适的车辆模型,对实现⽆⼈车的路径跟踪⾄关重要。
所谓车辆模型,即描述车辆运动状态的模型,⼀般可分为两类:运动学车辆模型;动⼒学车辆模型。
研究表明,在低速时,车辆的运动学特性较为突出;⽽在⾼速时,车辆的动⼒学特性对⾃⾝的运动状态影响较⼤。
1、运动学车辆模型车辆运动学模型如下图所⽰。
车辆运动学模型这⾥假定车辆是⼀个刚体,根据上图所⽰的⼏何关系,可以得到下⾯的车辆运动学数学模型。
运动学模型的数学公式其中,x0 和 y0 表⽰车辆质⼼的位置,v 为质⼼的纵向速度,r 为车辆的横摆⾓速度,Ψ为车辆的航向⾓,β为车辆的质⼼侧偏⾓。
在低速情况下,车辆在垂直⽅向的运动通常可以忽略,也即车辆的质⼼侧偏⾓为零,车辆的结构就像⾃⾏车⼀样,因此上述模型可以简化⼀个⾃⾏车模型,如下图所⽰:⾃⾏车模型整个模型的控制量可以简化为 v 和δ,即纵向车速和前轮偏⾓。
通常车辆的转向控制量为⽅向盘⾓度,因此需要根据转向传动⽐,将前轮偏⾓转化为⽅向盘⾓度。
上述的⾃⾏车车辆模型适⽤范围⾮常⼴,可以解决⼤部分问题。
但当车辆⾼速⾏驶时,使⽤简单的⼆⾃由度车辆模型通常⽆法满⾜横向控制的精确性和稳定性,这时就需要⽤到车辆的动⼒学模型。
2、动⼒学车辆模型汽车实际的动⼒学特性⾮常复杂,为精确描述车辆的运⾏状态,相关研究学者提出了多种多⾃由度的动⼒学模型。
不过,复杂的车辆动⼒学模型虽然较好的反映车辆的实际运动状态,但并不适⽤于⽆⼈车的横向控制。
其中,单轨模型是⼀个应⽤⽐较多的动⼒学车辆模型。
单轨模型是在忽略了空⽓动⼒学、车辆悬架系统、转向系统等的基础上,将前后轮分别⽤⼀个等效的前轮和后轮来代替,从⽽得到的车辆模型。
单轨模型的具体受⼒分析如下图所⽰。
单轨模型上图中的车⾝坐标系oxy,是以车辆质⼼为坐标原点,以沿车⾝向前的⽅向为x的正⽅向,以垂直于横轴的向左的⽅向为y的正⽅向。

基于曲率与车速的两点智能控制驾驶员模型在现代社会,汽车驾驶已经成为了极为普遍的交通方式。
在这些驾驶行为中,驾驶员需要注意到许多因素,例如车速、路况以及曲率等。
对于驾驶员而言,正确地处理这些因素相当重要。
因此,基于曲率与车速的两点智能控制驾驶员模型应运而生。
首先,曲率是汽车行驶中最重要的因素之一。
曲率指的是车辆在转弯或弯曲路段中需要遵循的弧线曲率方向。
车辆在行驶中需要遵循这些曲率,避免发生任何意外。
如果驾驶员无法正确处理曲率,那么车辆就有可能失控,从而发生意外。
因此,对于驾驶员而言,在行驶过程中需要使用曲率这一因素作为决策的一个重要指标。
其次,车速也是驾驶员需要注意的重要因素之一。
车速可以影响车辆的安全性和可控性。
如果车速过快,那么驾驶员就需要更迅速地做出决策。
但是如果车速过慢,那么驾驶员就需要更加专注和耐心地处理路面上的情况。
因此,在处理曲率时,驾驶员需要根据车速来做出相应的决策。
基于曲率与车速的两点智能控制驾驶员模型通过将这两个因素结合起来,使得驾驶员可以更好地处理复杂的路况。
该模型利用计算机技术对驾驶过程中曲率和车速等因素进行实时监测,并根据不同的情况做出相应的处理决策。
如果车速过快,系统就会根据曲率的变化进行适当的减速控制。
如果曲率过弯,系统就会根据车速的变化进行相应的转向操作。
随着人工智能和自动驾驶技术的不断进步,基于曲率与车速的两点智能控制驾驶员模型也将越来越智能化。
未来的驾驶将更加安全和高效,同时也将更加人性化和智能化。
总而言之,基于曲率与车速的两点智能控制驾驶员模型是一种非常重要的技术,可以提高驾驶员的驾驶水平和安全性。
随着技术的不断进步,该模型将为未来的驾驶带来更多的便利和安全保障。
除了曲率与车速之外,驾驶员需要注意的其他因素还有很多,例如道路状况、天气、交通状况等。
因此,在驾驶员模型的开发中,需要考虑到各种不同的因素。
现代智能驾驶系统通常采用深度学习和机器学习等技术,通过对数据的分析和处理,训练出一个能够根据不同情况自动作出决策的模型。
一、引言近年来,随着经济的快速增长和城市化进程的加快,轨道交通作为我国的基础设施、国民经济动脉和大众化交通工具得到了迅猛发展。
轨道交通系统大量新技术、新设备的投入使用,一方面提高了运行的安全性,另一方面也对轨道交通司机的胜任力提出了更高要求。
胜任力这一概念最早是由McClelland 于 1973 年提出的,并被应用于领域,此后,这一概念在管界被广泛使用。
胜任力最初是指能够区分在特定的工作岗位和组织环境中绩效水平的个人特征,此后有学者提出胜任力是个体相关行为的类别,强调从外显的人的行为来看待胜任力;胜任力是潜在的,持久的个人特征,是直接影响业绩的个人条件和行为的潜在特征,包括技能、能力、知识、个性特征、价值观、自我特质或社会角色等。
可以说,胜任力是各项胜任特征的有机统一,是由多种要素按一定结构方式组成的综合性系统。
随着研究的深入和经济社会的发展,胜任力模型被广泛应用于企业管理、公共教育和等领域。
例如,仲理峰在胜任力研究新进展中提出,虽然胜任力模型在我国提出的时间较国外稍晚,但不少政府机构和企事业单位已开始此方面的研究和应用。
目前一些规模较大的企业已将胜任力模型作为企业招聘、选拔、人员配置、评估等管理的基础性依据。
通过胜任力模型可以辨别个体胜任力,适用于人员的选拔与评价,因而用其探讨轨道交通司机的胜任力,有助于明确司机胜任工作所要具备的能力素质,以及各项能力素质对保障行车安全所产生的作用,从而有利于列车的正常、安全运行。
从轨道交通行业的特点和环境出发,本文认为轨道交通司机胜任力主要包括个性特征、专业知识、专业能力和基础素质四个方面。
胜任力系统结构,如图 1 所示。
1. 个性特征: 包括情绪稳定性与责任意识两个方面,主要强调轨道交通司机的个性、情绪等方面的特征。
2. 专业知识: 包括车辆基础知识与掌握两个方面,主要强调轨道交通司机专业知识与素质方面的特征。
3. 专业能力: 包括复杂反应能力、注意力分配与转移能力、学习能力、作业稳定性、视野深度与广度、瞬时记忆力六个方面,主要强调轨道交通司机各项专业能力的特征。
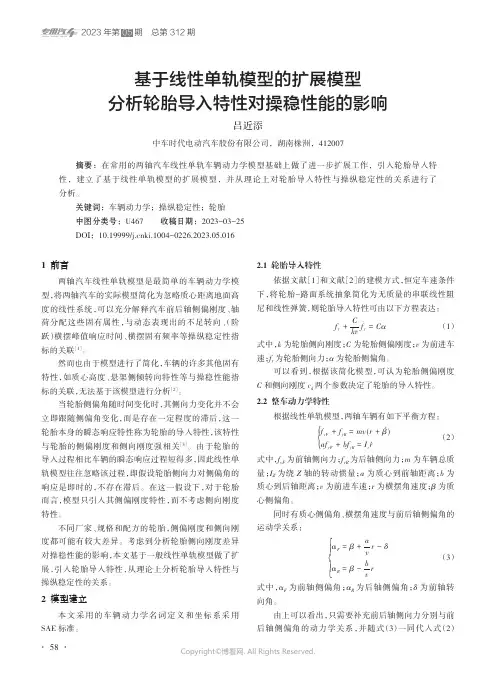
2023年第05期总第312期基于线性单轨模型的扩展模型分析轮胎导入特性对操稳性能的影响吕近添中车时代电动汽车股份有限公司,湖南株洲,412007摘要:在常用的两轴汽车线性单轨车辆动力学模型基础上做了进一步扩展工作,引入轮胎导入特性,建立了基于线性单轨模型的扩展模型,并从理论上对轮胎导入特性与操纵稳定性的关系进行了分析。
关键词:车辆动力学;操纵稳定性;轮胎中图分类号:U467收稿日期:2023-03-25DOI:10.19999/ki.1004-0226.2023.05.0161前言两轴汽车线性单轨模型是最简单的车辆动力学模型,将两轴汽车的实际模型简化为忽略质心距离地面高度的线性系统,可以充分解释汽车前后轴侧偏刚度、轴荷分配这些固有属性,与动态表现出的不足转向、(阶跃)横摆峰值响应时间、横摆固有频率等操纵稳定性指标的关联[1]。
然而也由于模型进行了简化,车辆的许多其他固有特性,如质心高度、悬架侧倾转向特性等与操稳性能指标的关联,无法基于该模型进行分析[2]。
当轮胎侧偏角随时间变化时,其侧向力变化并不会立即跟随侧偏角变化,而是存在一定程度的滞后,这一轮胎本身的瞬态响应特性称为轮胎的导入特性,该特性与轮胎的侧偏刚度和侧向刚度强相关[3]。
由于轮胎的导入过程相比车辆的瞬态响应过程短得多,因此线性单轨模型往往忽略该过程,即假设轮胎侧向力对侧偏角的响应是即时的,不存在滞后。
在这一假设下,对于轮胎而言,模型只引入其侧偏刚度特性,而不考虑侧向刚度特性。
不同厂家、规格和配方的轮胎,侧偏刚度和侧向刚度都可能有较大差异。
考虑到分析轮胎侧向刚度差异对操稳性能的影响,本文基于一般线性单轨模型做了扩展,引入轮胎导入特性,从理论上分析轮胎导入特性与操纵稳定性的关系。
2模型建立本文采用的车辆动力学名词定义和坐标系采用SAE 标准。
2.1轮胎导入特性依据文献[1]和文献[2]的建模方式,恒定车速条件下,将轮胎-路面系统抽象简化为无质量的串联线性阻尼和线性弹簧,则轮胎导入特性可由以下方程表达:f y +C kv f y.=Cα(1)式中,k 为轮胎侧向刚度;C 为轮胎侧偏刚度;v 为前进车速;f y 为轮胎侧向力;α为轮胎侧偏角。
含假人模型的跨坐式单轨车辆碰撞安全仿真分析杜子学;徐道雷;张晓旭【摘要】以跨坐式单轨车辆为例,开展了含假人模型的跨坐式单轨车辆碰撞仿真有限元建模;并对其在一定初速度下与固定刚性墙的正面碰撞过程进行计算机仿真分析,验证了车体的耐撞性能.同时,得出了碰撞过程中乘员的响应程度与伤害程度,即:假人头部HIC值为562 mm,胸部压缩量为38mm,人体损伤低于损伤标准,车辆结构安全性也符合要求.%Taking the straddled-type monorail vehicle body as the major object, a FE model is established which is a-bout collision simulation of the straddled-type monorail vehicle with a dummy model on board. The frontal crash simulation of the straddle-type monorail vehicle is implemented, the crash characteristic of the vehicle body is verified: the injury degree of the dummy model in crash process could meet the demands of vehicle structure.【期刊名称】《城市轨道交通研究》【年(卷),期】2013(016)002【总页数】4页(P52-55)【关键词】跨坐式单轨车辆;正面碰撞;假人模型【作者】杜子学;徐道雷;张晓旭【作者单位】重庆交通大学轨道交通研究院,400074,重庆;重庆交通大学轨道交通研究院,400074,重庆;重庆交通大学轨道交通研究院,400074,重庆【正文语种】中文【中图分类】U270.1+4;U232近年来,跨坐式单轨交通以其线路占地小、噪声低、建设投资费用较低以及完成的运量在公共交通中的比例也越来越大等优越性,在国内多个城市先后建成。
有关单轨模型知识点总结一、单轨模型的基本概念1. 内容和分析单轨模型的核心概念是"轨迹",它指的是个体在特定时间段内的一系列行为、决策和情感变化。
这些变化可以用一条时间轴来表示,从而形成了个体的"行为轨迹"。
在分析单轨模型时,需要关注以下几个方面:(1) 决策点这是指个体在做出决策时所面临的选择点,比如在购物时选择买什么、在工作中选择采取何种行为等。
决策点是个体行为轨迹中的重要节点,对于影响整个轨迹的走向具有重要作用。
(2) 行为和情感变化行为和情感是个体内在状态的表现,它们在不同的时间点会有不同的变化。
通过对这些变化的分析,可以揭示个体行为轨迹中的规律和趋势。
(3) 动态影响个体行为轨迹中的变化通常是相互影响的,比如一个决策的结果可能会对后续的决策产生影响,这种"动态影响"是个体行为轨迹中的重要机制。
2. 模型的构建单轨模型的构建需要考虑以下几个方面:(1) 控制因素单轨模型认为个体行为轨迹是由一系列内在的控制因素所决定的,这些控制因素可以是个体的认知特点、情感状态、社会环境等。
在构建模型时,需要对这些控制因素进行量化和分析。
(2) 行为动力学行为动力学是研究个体行为轨迹中的变化规律的理论框架,它关注行为变化的动态过程和规律,对于揭示个体行为的本质具有重要作用。
(3) 模型参数单轨模型中存在一系列参数,这些参数可以用来描述个体行为轨迹的特征和动态变化。
在构建模型时,需要对这些参数进行估计和分析,以揭示个体行为轨迹的规律。
3. 应用领域单轨模型在心理学、社会学、管理学等领域都有着广泛的应用。
例如,在心理学中,单轨模型可以用来研究个体的决策过程和情感变化;在社会学中,单轨模型可以用来分析个体在不同社会环境下的行为特征;在管理学中,单轨模型可以用来研究员工的行为和决策。
二、单轨模型的研究方法1. 数据采集单轨模型的研究通常需要使用大量的行为数据,这些数据可以包括个体的行为记录、问卷调查、实验数据等。