点扩展函数psf的估计.docx
- 格式:docx
- 大小:33.07 KB
- 文档页数:7
本文部分内容来自网络整理,本司不为其真实性负责,如有异议或侵权请及时联系,本司将立即删除!== 本文为word格式,下载后可方便编辑和修改! ==zemax实验报告篇一:ZEMAX 实验报告基于基本透镜组的照相物镜设计Zemax设计报告徐昕 10272055设计目的通过对设计一个以基本透镜组为基础的照相物镜,学会Zemax软件的基本应用及操作。
设计要求设计一个照相物镜,系统焦距f’=9mm,相对孔径1:4设计过程1.系统建模1.1选取初始结构从《光学设计手册》(李士贤,郑乐年编,北京理工大学出版社,1990)中选取了一个1.2系统特性参数输入在General系统通用数据对话框中设置孔径和玻璃库,如图1-1,图1-2。
打开视场设定对话框设置5个视场,如图1-3。
打开波长设定对话框点击“Select>>F,d,C(visible)”自动加入三个波长,如图1-4。
表1-1图 1- 1图 1- 2图1- 3图1- 41.3初始结构输入对照表1-1,在Lens Data Editor中输入初始结构,如图1-5。
利用Zemax中的“solve”功能,求解透镜组最后一面的厚度。
选取需要设计的单元格,在“Solve”中选取“Thickness”,弹出“Thickness Solve on surface 7”求解对话框。
在对话框“Solve type”中选择“Marginal ray height”,将“Height”值输入为“0”,表示将像面设置在边缘光线聚焦的像方焦平面上,如图1-6,图1-7。
图 1-5图1-6图 1-71.4调整系统焦距打开“System Data”系统数据报告窗口,查看系统现有焦距,为65.65414mm,如图1-8,与设计要求不符,需要通过缩放功能进行调整。
选择“Tools>>Scale Lens”,缩放因子为9/65.65414=0.137082,在Scale By Factor缩放因子后填入0.137082,如图1-9。
采用差分进化算法的点扩展函数估计【摘要】本文首先介绍了差分进化算法是什么,它的特点,作用,以及它的主要优点以及应用的场景;其次,介绍了点扩展函数估计(PEF),PEF的基本概念,理论框架,以及它在模拟建模领域的广泛应用;最后,本文提出了采用差分进化算法的PEF估计,提出了在建模和模拟中采用差分进化算法的PEF估计最佳方法,以及基于点扩展函数求解大型优化问题的有效性,为差分进化算法在模拟建模领域的探索提供了新的思路。
【Introduction】差分进化算法(Differential Evolution Algorithm,DE)是一种用于求解约束和非约束优化问题的搜索方法,由Rainer Storn和Kenneth Price在1995年提出。
DE算法是一种模拟生物进化的迭代搜索算法,它通过不断改变变量的取值来改善函数的最优值。
DE算法的主要特点是具有快速收敛、无参数调节、容易实现等优点,广泛应用于模式识别、机器学习、数据挖掘、信号处理等领域。
点扩展函数估计(PEF)是一种建模和模拟技术。
它可以用有限数量的观测参数来拟合任何连续变量之间的复杂关系。
这种技术可以应用于许多科学和工程领域,以及模式建模和优化,例如投资决策和运营优化。
PEF的基本概念是用高斯核构建的函数空间来表示函数,通过观测参数的取值来估计函数的取值。
【Research】本文研究的是采用差分进化算法来估计PEF。
首先,提出了一种基于差分进化算法的PEF估计最优函数。
该方法利用DE算法设置一个适应函数来表示PEF估计器,并将DE算法纳入到PEF 估计算法中。
接着,本文提出了一个基于点扩展函数求解大型优化问题的框架。
本文的贡献是将DE和PEF结合在一起,构建一种有效的解决方案,可以在多个模拟建模和优化问题中提高求解的有效性。
由于DE算法具有快速收敛和容易实现的特点,因此将DE算法作为PEF估计的最士工具。
DE算法的突变运算可以使得个体的取值发生变化,从而完成PEF估计。
卷积点扩展函数具体定义google~~看到连续信号与系统的时域分析。
将连续信号x分为无穷个加权冲击信号只和,在利用x和冲击响应函数的卷积得到x的响应。
点扩展函数最早见于光学成像系统,说的是点状光源经过光学系统后的成像情况;场景则被分为空间上分布的点状光源;场景的像则是这些点光源各自成像的和。
这个场景的成像过程就是"卷积",基于成像过程的图像复原则一般是是根据像来求反卷积,其中重要的就是光学系统的点扩展函数。
(点扩展函数的宽度决定了光学成像系统的分辨率。
各点光源的光线之间是不相干扰的(线性性))位置不变:不论点装光源是在哪个坐标,它们的像的形状都是一样的(一般光学系统边缘有畸变)点扩展函数可以直观的理解:理想系统中,点光源的成像也是点状的;但是由于光学系统的原因,成像往往影响到周围区域,这个影响用点扩展函数描述单个冲击信号可以理解为一维时域中的点状刺激的加权和冲击响应h(t)则可以理解为光学系统中的点扩展函数时不变:则和光学系统的位置不变类似,不过不再是指任意位置,而是指任意时间。
线性性和光学系统类似,不过是在时间上的扩散和光学系统的基于位置、影响是跨区域不同,时域信号是基于时间的,它的影响是跨时间的。
在典型的因果系统中,t1时刻的输入会延续到t1时刻以后,并且和t1时刻后的其它输入的响应相互叠加(这个叠加的原因就是要求系统具有时间上的线性性)不去考虑信号x如何分解,只考虑T1时刻x(t1)幅度的冲击信号,产生的冲击响应x(t1)h(t-T1)将会一直延续下去T2时刻x(t2)幅度的冲击信号,产生的冲击响应x(t2)h(t-T2)将会一直延续下去在某时刻t(假设t t1,t2),则t时刻的输出是以前各时刻的冲击响应的加权和~其实,其实很简单的事情;将x离散化,在每个离散时间点t0出,将h(t)放大x(t0)倍的函数图像安放t0处(x(t0)h(t-t0)),全部安放好以后,对每个t0进行叠加~(每个时刻的响应在时间上往后传递,然后在每个时刻将各个冲击此刻的响应累加~)。
基于PSF参数估计与后处理的图像去模糊算法黄超;刘传毅;刘伟【摘要】针对当前运动模糊图像复原技术难以准确找到点扩散函数与消除振铃效应的问题,提出一种基于点扩展函数与振铃效应后处理的运动图像复原算法.根据运动模糊模型得出PSF的两个参数角度θ和长度L,通过在频域中引入傅里叶频谱,利用梯度变化代替检测转换点,计算角度和长度,引入RL迭代算法进行反卷积修复;嵌入后处理技术,根据Sobel边缘检测算子,生成复原图像的边缘映射,将复原图像划分为3个区域,在3个区域分别进行色彩值转换,降低振铃效应.仿真结果表明,与当前去模糊算法相比,该算法的PSF参数估计更准确,去模糊质量更佳,大幅降低了振铃效应.【期刊名称】《计算机工程与设计》【年(卷),期】2016(037)009【总页数】6页(P2485-2489,2576)【关键词】图像复原;点扩散函数;傅里叶频谱;振铃效应;后处理【作者】黄超;刘传毅;刘伟【作者单位】枣庄学院信息科学与工程学院,山东枣庄277160;山东大学计算机科学与技术学院,山东济南250100;南京理工大学计算机科学与工程学院,江苏南京210094【正文语种】中文【中图分类】TP391运动模糊严重影响了图像的质量和后续使用,其退化机制的PSF是未知的,因此对模糊图像复原需要对PSF进行估计,同时图像复原后会产生振铃效应,影响复原后图像的视觉特性,使图像后续处理难以进行[1-3]。
为此,很多学者对PSF进行了研究,如范志刚等[4]根据波前编码相位板优化技术对PSF参数估计简化,获得了实际成像机制中相位板的最优参数,仿真结果显示,其技术的复原图像质量明显高于未使用相位板的方法,但是该算法比较繁琐,计算量较大,对于严重模糊的图像复原效果欠佳;谢伟秦等[5]提出了基于倒频谱运动模糊图像PSF参数估计技术,并对其技术进行了验证,结果显示其算法拥有良好的去模糊效果,但是对于气动退化图像修复效果不佳;陈波[6]通过利用低分辨率下小波变换模极大值和高斯点扩散函数方差的关系,并结合Fried提出一种新的PSF参数估计方法,通过实验可知其复原效果较好,但该技术的复原图像存在较严重的二次模糊和振铃效应。
概念以空间频率为变量的传递的像的调制度和相移的函数。
一个非相干照明的光学成像系统,像的强度也是线性的,满足叠加原理。
为了得到点光源的像强度分布,用几何光学概念即像是物的准确再现是不行的。
必须考虑衍射效应,才能对物和像之间关系有更全面理解。
根据光的衍射理论可以研究点光源至透镜、至像平面光波的整个传播过程,最后得出像平面上强度分布是透镜孔径函数的夫琅和费衍射图样,称为光学系统的强度脉冲响应,或点扩展函数。
由它可以确定光学系统的成像性质,因为任意复杂物体由无数点源组成,其像的强度为物强度与点扩展函数的卷积。
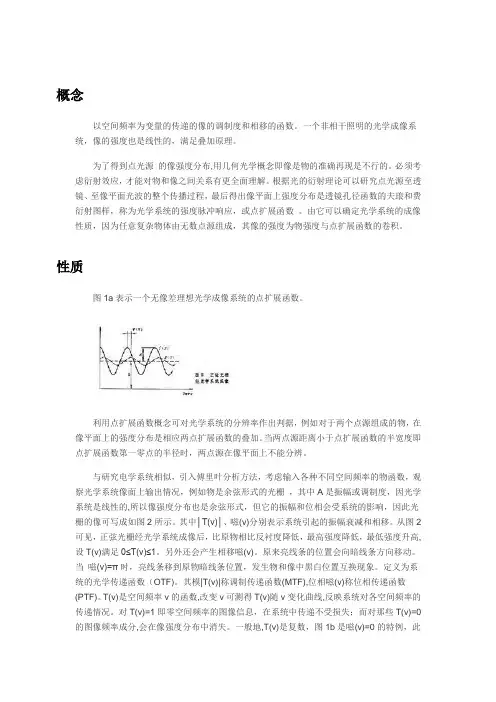
性质图1a表示一个无像差理想光学成像系统的点扩展函数。
利用点扩展函数概念可对光学系统的分辨率作出判据,例如对于两个点源组成的物,在像平面上的强度分布是相应两点扩展函数的叠加。
当两点源距离小于点扩展函数的半宽度即点扩展函数第一零点的半径时,两点源在像平面上不能分辨。
与研究电学系统相似,引入傅里叶分析方法,考虑输入各种不同空间频率的物函数,观察光学系统像面上输出情况,例如物是余弦形式的光栅,其中A是振幅或调制度,因光学系统是线性的,所以像强度分布也是余弦形式,但它的振幅和位相会受系统的影响,因此光栅的像可写成如图2所示。
其中│T(v)│、嗞(v)分别表示系统引起的振幅衰减和相移。
从图2可见,正弦光栅经光学系统成像后,比原物相比反衬度降低,最高强度降低,最低强度升高,设T(v)满足0≤T(v)≤1。
另外还会产生相移嗞(v)。
原来亮线条的位置会向暗线条方向移动。
当嗞(v)=π时,亮线条移到原物暗线条位置,发生物和像中黑白位置互换现象。
定义为系统的光学传递函数(OTF)。
其模|T(v)|称调制传递函数(MTF),位相嗞(v)称位相传递函数(PTF)。
T(v)是空间频率v的函数,改变v可测得T(v)随v变化曲线,反映系统对各空间频率的传递情况。
对T(v)=1即零空间频率的图像信息,在系统中传递不受损失;而对那些T(v)=0的图像频率成分,会在像强度分布中消失。
点扩展函数的估计 一般的点扩展函数估计是图像恢复中的一个非常困难的问题,一些常用的方法是“运用先验知识的方法,运用后验知识的方法以及误差—参数曲线分析法。
➢ 运用先验知识的方法 一般来说,大气湍流、光学系统散焦以及照相机与景物之间的相对运动造成的模糊是图像处理中经常遇到的情况,这类退化的点扩展函数可以根据导致模糊的物理过程(先验知识)来确定。研究表明,对于长时间曝光下大气湍流造成的转移函数(它的傅里叶逆变换即为点扩展函数)可近似为高斯型,即表达成
H(u,v)≈exp[−c(u2+v2)5/6] 其中,C为与湍流性质有关的常数。光学系统散焦造成的转移函数式熟知的“Bes-Sinc”函数,可写成
H(u,v)=J1(πdp)/(πdp) 其中,p=(u2+v2)12,d为光学系统的散焦点扩展函数(在线性移不变系统中是圆函数)的直径,J1
(.)是第一类一阶贝塞尔函数。
下面以摄影中照相机与景物之间的相对移动造成模糊的情况,作为先验知识来确定转移函数的具体例子。
假定照相机不动,图像f(x,y)在图像面上移动并且图像f(x,y)除移动外不随时间变化。令x0(t)和y0
(t)分别代表位移的x分量和y分量,那么在快门开启的时
间T内,胶片上某点的总曝光量是图像在移动过程中一系列相应像素的亮度对该点作用之总和。如果快门开启时间与关闭时间可以忽略不计,且光学系统假设是完善的,且有下列关系存在:
g(x,y)=∫f[x−x0(t),y−y0(t)]T0dt 对其两边取傅里叶变换,得到 G(u,v)=∫∫∫f[x−x0(t),y−y0(t)]T0∞−∞∞−∞dt∙exp[−j2π(ux+vy)]dxdy =∫∫∫f[x−x0(t),y−y0
(t)]∞−∞+∞−∞T0∙exp[−j2π(ux+vy)]dxdydt
根据傅里叶变换的空间位置平移性质可得 G(u,v)=∫F(u,v)T0exp{−j2π[ux0(t)+vy0(t)]}dt
=f(u,v)∫exp{−j2π[ux0(t)+vy0(t)]}dtT0 定义
H(u,v)=∫exp{−j2π[ux0(t)+vy0(t)]}dtT0 那么上式可以表示成 G(u,v)=H(u,v)f(u,v) 可见,H(u,v)的表达式就是移动模糊的转移函数。如果移动只代表为沿着x方向以速度V作匀速运动,那么有
x0=Vt,y0(t)=0 将上式代入H(u,v)表达式,可得
H(u,v)=∫exp(−j2πuVt)dtT0
=(1πuV)sin(πuVt)exp(−jπuVt) =Texp(−jπuVt)sinc(πuVt) ➢ 运用后验判断的方法 如果事先并不知道退化的物理过程,或者这种物理过程过于复杂,难以用来确定h(x,y),那么可能的办法只有从退化图像本身来估计h(x,y)。例如,若有把握断定原始景物某部位有一个清晰的点,于是那个点在退化图像上的模糊影像就是点扩展函数,天文图片会有这种情况,图片上某颗细小星体的退化图像可用来估计点扩展函数。
如果原始景物含有明显的直线,则有时可以从这些线条的退化图像来确定h(x,y),为了说明这一方法,可假定原始景物中有一条平行于x轴的理想线源,记做δ(y),此处δ(y)被看作是二维函数,但不依赖于x。该理想线源的退化图像则称为线扩展函数,记做h1
(y),可表示成
h1(y)=∫∫δ(β)∞−∞∞−∞h(x−a,y−b)dαdβ 利用δ函数的筛选性质,此式变成 h1(y)=∫h(x−a,y)dα∞−∞ 对上式做变量置换x−a=x,可得
h1(y)=∫h(x,y)dx∞−∞ 这说明线扩展函数在y方向的分布与位置x无关,即在任何一条与x轴平行的线上,h1(y)的值是一个常数,而h1
(y)在y方向上任一点的数值是点扩展函
数在该点沿x方向的积分。显然,如果点扩展函数式圆对称函数,则线扩展函数与线源的取向无关;否则,就与线源的取向有关。
若h1(y)的傅里叶变换为H1
(V),则
H1(V)=∫h1∞−∞(y)exp(−j2πvy)dy 但我们知道 H(u,v)=∫∫h(x,y)exp[−j2π(ux+vy)]dxdy∞−∞∞−∞ 如果把u=0代入这一方程并使用上两式可以得到 H(0,v)=∫[∫h(x,y)dx]exp[−j2πvy]dy∞−∞∞−∞=H1(v)
这表示平行于x轴的线扩展函数的傅里叶变换是转移函数H(u,v)在频谱平面上验u=0直线所取的值。同理可以证明,与x轴成θ的线扩展函数,其傅里叶变换则是H(u,v)在频谱平面上沿斜率为θn+90°的直线所取的值。因此,如果能断定原始景物含有各种取向θ1,θ2,⋯,θn的线,就能从这种集购物退化的图像上推到出H(u,v)沿着过原点具有斜率θ1+90°,,θ2+90°,⋯θn+90°的那些辐射形直线上的值。
如果能肯定点扩展函数是圆对称的,则H(u,v)也是圆对称的。因此盒子要知道沿一条辐射线的H(u,v)的值,就知道它各处的值。如果没有这种先验知识,一般必须求得沿着紧挨在一起的许多辐射线上的H(u,v)值。倘若频谱平面能被足够密集的这种线上的H(u,v)值所覆盖,就能构成H(u,v)的精密近似值。并通过内插法求得频谱面坐标网络交点上的值,然后通过傅里叶变换即可求得h(x,y)。
假使原始景物不含有点或者线的内容,然而它可能含有明显的界线。现在将要证明界线的退化图像的导数等于平行于该界线的线源的退化函数。
一条沿x轴的理想界线在数学上可用S(y)表示,这里的S(y) 单位阶跃函数,即
S(y)={1,y≥00,y<0
设hs
(y)是该界线的退化图像,那么
hs(x,y)=∫∫h(x−a,y−β)S(β)∞−∞∞−∞dαdβ =∫∫h(a,β)S(y−β)∞−∞∞−∞dαdβ 由于平行于x轴的界线的退化图像与x无关,所以上式中的hs
(x,y)可用
hs
(y)代替,变成
hs(y)=∫∫h(a,β)S(y−β)∞−∞∞−∞dαdβ 上式中两边对y取偏导数并在右边互换积分和微分算符的次序,得到 ∂hs(y)∂y=∫∫h(a,β)∂∂yS(y−β)∞−∞∞−∞dαdβ
=∫∫h(a,β)δ(y−β)∞−∞∞−∞dαdβ
=∫h(a,y)da∞−∞ 比较h1(y)=∫h(x,y)dx∞−∞和上式,可以看出 ∂h(y)∂y⁄=h1(y)
上式表明,一条线的退化图像就是平行于此线的界线退化图像的导数,因此,若原始景物中含有各种取向的界线,则可用前面讨论过的方法由这些界线退化图像的导数来确定点扩展函数,事实上,由于偏微分算子∂∂y⁄是线性位移不变算子,所以根据上式可得
h1(y)=∂hs(y)∂y=∂∂y[∫Hs
∞
−∞(v)exp(j2πvy)dv]
=∫Hs∞−∞(v)(j2πv)exp(j2πvy)dv 式中Hs(v)是hs(y)得傅里叶变换,由傅里叶变换定义可以看出 H1(v)=j2πvHs
(v)
H(0,v)=j2πvHs
(v) 还有一个方法可从退化图像本身估计转移函数H(u,v),把退化图像分成n个大小相等的子图像gi
(x,y),i=1,2,⋯,n,假设点扩展函数取值范围与上述子图
像的尺寸相比足够小,那么对于每个子图像,可以得到
gi(x,y)=∫∫fi(α,β)∞−∞∞−∞h(x−α,y−β)dαdβ,i=1,2,⋯n 对等式两边取傅里叶变换,有 Gi(u,v)=H(u,v)Fi(u,v),i=1,2,⋯n 对于i取乘积变换,得
∏Gi(u,v)ni=1=∏Fi(u,v)Hn(u,v)ni=1 或者
H(u,v)=[∏Gi(u,vni=1)]1/n/[∏Fi(u,vni=1)]1/n
若原始景物各子图像内灰度起伏足够大,且各子图像之间灰度也有相当大的差异,则可期望上式右边的分母接近于一个常数(也即与u、v无关)。另一方面,Gi(u,v)也可由退化子图像gi
(x,y)求得。于是根据上式即可估计H(u,v),
从而求得点扩展函数h(x,y)。
➢ 误差-参数曲线分析法 对于点扩展函数可用由某一参数来表征的退化方式(如线性移动和散焦等),这里介绍误差-参数曲线分析方法来估计点扩展函数。
如果点扩展函数可用某一个参数表征,点扩展函数的估计就变成了对应参数的估计。比如散焦和移动分别用散焦半径r和移动距离d来表征。现在把点扩展函数写成h(α)的形式。误差-参数曲线分析法是用下面的方法产生一个误差-参数曲线,通过对曲线的分析来决定点扩展函数的参数,其基本步骤如下。