2捷联惯性导航系统初始对准原理
- 格式:docx
- 大小:354.91 KB
- 文档页数:20
1 绪论随着计算机和微电子技术的迅猛发展,利用计算机的强大解算和控制功能代替机电稳定系统成为可能。
于是,一种新型惯导系统--捷联惯导系统从20世纪60年代初开始发展起来,尤其在1969年,捷联惯导系统作为"阿波罗"-13号登月飞船的应急备份装置,在其服务舱发生爆炸时将飞船成功地引导到返回地球的轨道上时起到了决定性作用,成为捷联式惯导系统发展中的一个里程碑。
捷联式惯性导航(strap-down inertial navigation),捷联(strap-down)的英语原义是“捆绑”的意思。
因此捷联式惯性导航也就是将惯性测量元件(陀螺仪和加速度计)直接装在飞行器、舰艇、导弹等需要诸如姿态、速度、航向等导航信息的主体上,用计算机把测量信号变换为导航参数的一种导航技术。
现代电子计算机技术的迅速发展为捷联式惯性导航系统创造了条件。
惯性导航系统是利用惯性敏感器、基准方向及最初的位置信息来确定运载体的方位、位置和速度的自主式航位推算导航系统。
在工作时不依赖外界信息,也不向外界辐射能量,不易受到干扰破坏。
它完全是依靠载体自身设备独立自主地进行导航,它与外界不发生任何光、声、磁、电的联系,从而实现了与外界条件隔绝的假想的“封闭”空间内实现精确导航。
所以它具有隐蔽性好,工作不受气象条件和人为的外界干扰等一系列的优点,这些优点使得惯性导航在航天、航空、航海和测量上都得到了广泛的运用[1]1.1 捷联惯导系统工作原理及特点惯导系统主要分为平台式惯导系统和捷联式惯导系统两大类。
惯导系统(INS)是一种不依赖于任何外部信息、也不向外部辐射能量的自主式导航系统,具有隐蔽性好,可在空中、地面、水下等各种复杂环境下工作的特点。
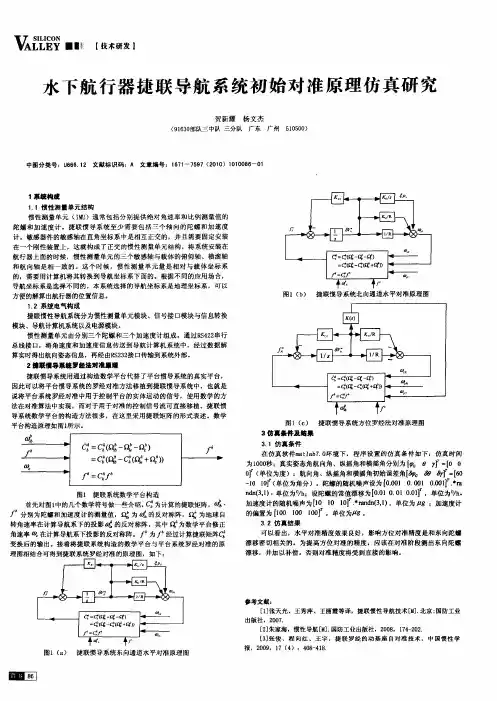
捷联惯导系统(SINS)是在平台式惯导系统基础上发展而来的,它是一种无框架系统,由三个速率陀螺、三个线加速度计和微型计算机组成。
平台式惯导系统和捷联式惯导系统的主要区别是:前者有实体的物理平台,陀螺和加速度计置于陀螺稳定的平台上,该平台跟踪导航坐标系,以实现速度和位置解算,姿态数据直接取自于平台的环架;后者的陀螺和加速度计直接固连在载体上作为测量基准,它不再采用机电平台,惯性平台的功能由计算机完成,即在计算机内建立一个数学平台取代机电平台的功能,其飞行器姿态数据通过计算机计算得到,故有时也称其为"数学平台",这是捷联惯导系统区别于平台式惯导系统的根本点。
捷联惯导与组合导航系统高精度初始对准技术研究捷联惯导与组合导航系统高精度初始对准技术研究引言捷联惯导与组合导航系统是一种集捷联惯导和其他导航传感器(如GPS、气压计、陀螺仪等)的优势于一体的导航系统,具有在惯导滞后情况下实现导航信息快速、准确更新的优势。
为了确保导航精度和可靠性,捷联惯导与组合导航系统的初始对准是不可或缺的关键技术之一。
本文将重点探讨捷联惯导与组合导航系统高精度初始对准技术的研究。
一、捷联惯导与组合导航系统概述捷联惯导与组合导航系统是一种通过融合多种导航传感器测量数据来计算导航解的导航系统。
其中,捷联惯导通过惯性导航算法利用加速度计和陀螺仪提供的姿态、速度和位移信息进行导航计算,而组合导航则通过融合GPS和其它传感器的信息来修正惯导的误差,提供更准确的导航结果。
二、初始对准技术的研究现状初始对准技术在捷联惯导与组合导航系统中起到了决定性的作用,对其精度和可靠性具有重大影响。
目前,针对初始对准技术的研究主要集中在以下几个方面:1. 惯性传感器标定:惯导系统的精度和准确性直接依赖于惯性传感器的性能。
因此,对于惯导系统而言,惯性传感器的标定至关重要。
传感器标定主要涉及惯性传感器的误差估计、参数校准和标定方法等。
2. 导航状态估计算法:捷联惯导与组合导航系统的核心是导航状态估计算法。
目前常用的算法包括扩展卡尔曼滤波(EKF)、无迹卡尔曼滤波(UKF)以及粒子滤波(PF)等。
这些算法通过融合多种传感器的信息,实现对导航状态的准确估计。
3. 高精度传感器融合:为了提高初始对准的精度和可靠性,可以考虑使用更高精度的传感器,如高精度的加速度计和陀螺仪。
此外,对于GPS系统而言,使用双频技术和高精度的差分GPS技术可以进一步提高导航精度。
三、捷联惯导与组合导航系统高精度初始对准技术研究在捷联惯导与组合导航系统高精度初始对准技术的研究中,可以采用以下方法来提高初始对准的精度和可靠性:1. 多目标标定方法:采用多目标标定方法来标定捷联惯导系统中的惯性传感器。
动基座条件下舰载武器捷联惯导系统初始对准研究1. 引言1.1 研究背景传统的捷联惯导系统在动基座条件下存在着诸多挑战,如基座的姿态变化、振动等因素会影响系统的捷联性能和初始对准精度。
研究动基座条件下舰载武器捷联惯导系统初始对准成为当前研究领域中的一个重要课题。
为了提高舰载武器系统的精确打击能力和战场生存能力,有必要深入研究动基座条件下捷联惯导系统的初始对准问题,探讨解决方案,优化系统性能。
这不仅对提升我国的军事实力具有重要意义,还对推动捷联惯导技术的发展和应用具有重要意义。
开展动基座条件下舰载武器捷联惯导系统初始对准研究具有重要的实践意义和战略意义。
1.2 研究意义本研究旨在探究动基座条件下舰载武器捷联惯导系统初始对准的问题,具有重要的实际意义和军事价值。
通过对捷联惯导系统的研究,可以提高舰载武器的打击精度和命中率,从而提升海军舰队的作战效能。
研究动基座条件下的挑战和解决方案,对于提升我国军事科技水平具有重要意义。
随着军事技术的不断发展和更新换代,对舰载武器系统的研究和改进势在必行,本研究将为我国海军现代化建设提供重要的技术支持。
本研究具有重要的实际意义和战略意义,对于提高海军舰队的作战效能和保障国家安全具有重要意义。
【内容结束】2. 正文2.1 动基座条件下舰载武器捷联惯导系统简介动基座条件下舰载武器捷联惯导系统是一种集成了捷联惯导技术的舰载武器系统,在对抗复杂环境下能够实现高精度打击目标的能力。
该系统由动基座、惯导系统和传感器组成,可以实现对目标的精确识别、跟踪和打击。
动基座可以根据目标的运动状态和环境变化实时调整武器的姿态,从而提高武器的打击精度和生存能力。
捷联惯导系统则能够利用惯性传感器和GPS等技术实现对目标的精确定位和引导,确保武器能够准确命中目标。
动基座条件下舰载武器捷联惯导系统是一种先进的武器系统,具有高度的精度和灵活性,能够有效应对复杂多变的作战环境,对提高舰载武器的作战效能具有重要意义。
1 绪论随着计算机和微电子技术的迅猛发展,利用计算机的强大解算和控制功能代替机电稳定系统成为可能。
于是,一种新型惯导系统--捷联惯导系统从20世纪60年代初开始发展起来,尤其在1969年,捷联惯导系统作为"阿波罗"-13号登月飞船的应急备份装置,在其服务舱发生爆炸时将飞船成功地引导到返回地球的轨道上时起到了决定性作用,成为捷联式惯导系统发展中的一个里程碑。
捷联式惯性导航(strap-down inertial navigation),捷联(strap-down)的英语原义是“捆绑”的意思。
因此捷联式惯性导航也就是将惯性测量元件(陀螺仪和加速度计)直接装在飞行器、舰艇、导弹等需要诸如姿态、速度、航向等导航信息的主体上,用计算机把测量信号变换为导航参数的一种导航技术。
现代电子计算机技术的迅速发展为捷联式惯性导航系统创造了条件。
惯性导航系统是利用惯性敏感器、基准方向及最初的位置信息来确定运载体的方位、位置和速度的自主式航位推算导航系统。
在工作时不依赖外界信息,也不向外界辐射能量,不易受到干扰破坏。
它完全是依靠载体自身设备独立自主地进行导航,它与外界不发生任何光、声、磁、电的联系,从而实现了与外界条件隔绝的假想的“封闭”空间内实现精确导航。
所以它具有隐蔽性好,工作不受气象条件和人为的外界干扰等一系列的优点,这些优点使得惯性导航在航天、航空、航海和测量上都得到了广泛的运用[1]1.1 捷联惯导系统工作原理及特点惯导系统主要分为平台式惯导系统和捷联式惯导系统两大类。
惯导系统(INS)是一种不依赖于任何外部信息、也不向外部辐射能量的自主式导航系统,具有隐蔽性好,可在空中、地面、水下等各种复杂环境下工作的特点。
捷联惯导系统(SINS)是在平台式惯导系统基础上发展而来的,它是一种无框架系统,由三个速率陀螺、三个线加速度计和微型计算机组成。
平台式惯导系统和捷联式惯导系统的主要区别是:前者有实体的物理平台,陀螺和加速度计置于陀螺稳定的平台上,该平台跟踪导航坐标系,以实现速度和位置解算,姿态数据直接取自于平台的环架;后者的陀螺和加速度计直接固连在载体上作为测量基准,它不再采用机电平台,惯性平台的功能由计算机完成,即在计算机内建立一个数学平台取代机电平台的功能,其飞行器姿态数据通过计算机计算得到,故有时也称其为"数学平台",这是捷联惯导系统区别于平台式惯导系统的根本点。
捷联惯导系统从20世纪60年代初开始发展起来,在1969年,捷联惯导系统作为"阿波罗"-13号登月飞船的应急备份装置,在其服务舱发生爆炸时将飞船成功地引导到返回地球的轨道上时起到了决定性作用,成为捷联式惯导系统发展中的一个里程碑。
捷联式惯性导航(strap-downinertialnavigation),捷联(strap-down)的英语原义是“捆绑”的意思。
因此捷联式惯性导航也就是将惯性测量元件(陀螺仪和加速度计)直接装在导弹需要诸如姿态、速度、航向等导航信息的主体上,用计算机把测量信号变换为导航参数的一种导航技术。
一、捷联惯导系统工作原理及特点惯导系统基本工作原理是以牛顿力学定律为基础,通过测量载体在惯性参考系的加速度,将它对时间进行积分,之后将其变换到导航坐标系,得到在导航坐标系中的速度、偏航角和位置信息等。
捷联惯导系统(SINS)是一种无框架系统,由三个速率陀螺、三个线加速度计和微型计算机组成。
由于惯性元器件有固定漂移率,会造成导航误差,因此导弹通常采用指令、GPS或其组合等方式对惯导进行定时修正,以获取持续准确的位置参数。
如采用指令+捷联式惯导捷联惯导系统能精确提供载体的姿态、地速、经纬度等导航参数,是利用惯性敏感器、基准方向及最初的位置信息来确定运载体的方位、位置和速度的自主式航位推算导航系统。
在工作时不依赖外界信息,也不向外界辐射能量,不易受到干扰破坏。
它完全是依靠载体自身设备独立自主地进行导航,它与外界不发生任何光、声、磁、电的联系,从而实现了与外界条件隔绝的假想的“封闭”空间内实现精确导航。
所以它具有隐蔽性好,工作不受气象条件和人为的外界干扰等一系列的优点。
除此以外捷联惯导系统的最大特点是没有实体平台,即将陀螺仪和加速度计直接安装在机动载体上,在计算机中实时的计算姿态矩阵,通过姿态矩阵把导航加速度计测量的载体沿机体坐标系轴向的加速度信息变换到导航坐标系,然后进行导航计算。
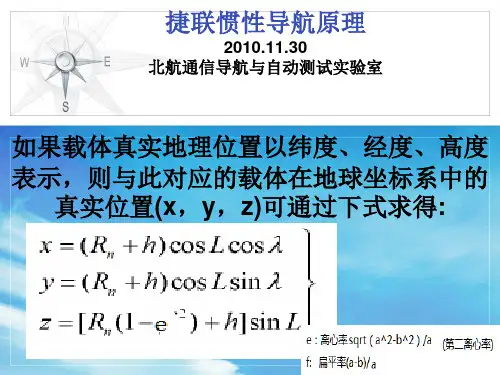
捷联惯性导航原理捷联惯性导航(Inertial Navigation System,简称INS)是一种基于捷联惯性测量单元(Inertial Measurement Unit,IMU)的导航系统。
该系统通过测量物体在空间中的加速度和角速度,进而推导出它的位置、速度和航向等导航信息。
捷联惯性导航系统由三个主要组件组成:加速度计、陀螺仪和计算机。
加速度计用于测量物体的加速度,陀螺仪用于测量物体的角速度,而计算机则用于整合和处理这些测量数据。
加速度计和陀螺仪通常被组合在一起形成IMU,IMU被安装在导航系统的载体上。
加速度计是用来测量物体的线性加速度的设备。
它的作用类似于测力仪,通过测量物体所受的力,可以计算出物体的加速度。
加速度计一般使用压电传感器或气泡级感应器来测量物体的加速度。
陀螺仪则是用来测量物体的角速度的设备。
它的原理基于陀螺效应,通过测量物体围绕轴线旋转的角速度来推导物体的旋转状态。
陀螺仪分为一体式陀螺仪和光纤陀螺仪两种类型,一体式陀螺仪主要使用电子仪器的原理,而光纤陀螺仪则使用光学原理。
在捷联惯性导航系统中,加速度计和陀螺仪的输出数据会被输入到计算机中进行处理。
计算机通过积分和滤波等算法,对加速度和角速度进行处理,推导出物体的位置和速度等导航信息。
计算机还会结合其他传感器如GPS等,以提高导航系统的精度和稳定性。
然而,捷联惯性导航也存在一些局限性。
首先,由于加速度计和陀螺仪的精度和稳定性有限,导致导航系统随着时间的推移会产生累积误差。
其次,在长时间的运动过程中,加速度计和陀螺仪可能受到震动、振动和温度变化等外界因素的影响,进而导致导航系统的精度下降。
为了解决这些问题,通常将捷联惯性导航系统与其他导航系统如GPS进行组合导航。
通过将两种导航系统的输出数据进行融合,可以克服各自的缺点,提高导航系统的精度和鲁棒性。
总结起来,捷联惯性导航是一种基于物体惯性特性的导航系统,通过测量物体的加速度和角速度,推导出物体的位置、速度和航向等导航信息。
捷联惯导系统快速罗经初始对准方法研究捷联惯导系统快速罗经初始对准方法研究1严恭敏1,严卫生1,2,徐德民1,21西北工业大学航海学院,西安(710072)2水下信息处理与控制国家级重点实验室,西安(710072)E-mail:******************摘要:在分析平台罗经初始对准原理基础上,提出了捷联罗经初始对准的原理并推导了适合于软件编程的算法。
将捷联罗经对准的具体实现划分为四个阶段:方位角未知情况下的水平对准、粗略方位自对准、重新水平对准和罗经方位对准,通过对大方位误差角捷联惯导非线性误差方程的简化,推导了粗略方位自对准的算法公式。
如果导航计算机存储容量足够大并且计算能力足够强,根据捷联惯导系统数学平台多样性和可进行逆向姿态控制的特点,设计了一种用于缩短捷联罗经初始对准时间的具体步骤。
最后,试验表明快速捷联罗经对准方案是有效的。
关键词:捷联惯导系统,罗经效应,初始对准,逆向控制中图分类号:V249.31. 引言平台惯导系统罗经初始对准过程通常可分为两步,先是水平调平,然后是方位对准。
方位对准在水平调平的基础上进行,一般采样罗经方位对准方法。
方位罗经对准利用的是罗经效应,也就是,在正确的平台跟踪当地地理坐标系的角速率控制指令下,如果平台存在方位轴向的偏差角,平台将产生绕东向轴的倾斜,该倾斜能由北向加速度计感测到,利用北向加速度计的输出并设计适当的控制规律,控制平台方位轴朝减小方位偏差方向转动,实现平台自动寻北。
捷联惯导系统初始对准通常可分为粗对准和精对准两个阶段:在粗对准阶段,利用地球自转角速度和重力加速度作为参考量,通过惯性器件的测量输出建立粗略的导航计算坐标系;在精对准阶段,通过现代控制理论最优估计方法估计出失准角,获得准确的姿态矩阵[1,2]。
捷联惯导系统经典解析式粗对准方法难以适应晃动干扰环境,有不少文献研究了晃动基座下的初始对准问题并且也出现一些应用实例,激光陀螺和光纤陀螺的发展和不断成熟为捷联罗经的研究注入了新的活力[3-6]。
一、初始对准惯导系统初始对准就是确定参考导航坐标系的一个过程。
惯导系统刚上电启动时,其载体坐标系相 对于参考导航坐标系的各轴指向完全未知或不够精确,无法立即进入导航状态,因此必须先确定载体坐标系相对于导航坐标系的空间方位,从惯导的角度看这等效于寻找参考导航坐标系的一个过程。
以地理坐标系作为参考坐标系为例,它的三轴指向分别是东向、北向和天向,其中天向是根据重力加速度定义的,有了天向也就等效于确定了水平面,在水平面上寻找东向和北向需要测定地球自转信息,因为北向是根据地球自转轴定义的。
重力加速度和地球自转角速度是惯导自对准的外界参考信息1、粗对准1.1解析粗对准初始对准一般是在运载体对地静止的环境下进行的,即运载体相对地面既没有明显的线运动也没有角运动,且对准地点处的地理位置准确已知,也就是说重力矢量和地球自转角速度矢量在地理坐标系(初始对准参考坐标系)的分量准确已知,如下实际惯导系统中陀螺和加速度计测量到的分别是重力矢量和地球自转角速度在载体系下的投影,但有时会存在角晃动和线晃动干扰影响,并且还存在加速度计测量误差和陀螺测量误差。
假设姿态阵为nb C ,则有如下惯导角速度关系及比力方程由于粗对准是在静基座条件下完成,忽略由线运动引起的部分量nen ω和()n n en nie v ⨯+ωω2,且考虑陀螺仪和加速度计的测量误差,近似估计为选择n g 作为主参考矢量(因为在静止状态下g 相对于w 更加重要),之后进行一个姿态阵估计1.2间接粗对准首先要定义两个重要的惯性坐标系。
①初始时刻载体惯性系(0b ):与初始对准开始瞬时的载体坐标系(b 系)重合,随后相对于惯性空间无转动;②初始时刻导航惯性系(0n ):与初始对准开始瞬时的导航坐标系(n 系,即地理坐标系)重合,随后相对于惯性空间无转动。
间接初始对准方法的关键是求解0b 系与0n 系的方位关系,即00n b C 。
从惯性坐标系中观察地球表面上某固定点的重力矢量,它的方向将随着地球自转逐渐改 变,24小时内恰好旋转一圈,形成一个锥面。