结构主动控制最优极点配置算法研究
- 格式:pdf
- 大小:384.25 KB
- 文档页数:5
基于遗传算法的结构主动控制作动器优化布置毛克阳;孙作玉;燕乐纬;王晖【摘要】The optimization of actuators of an active control structure under seismic excitation is studied. The random excitation is generated by equivalent excitation method, and the state space control algorithm is employed to calculate the dynamic responses. An optimized procedure based on genetic algorithm is proposed, in which a 0 -1 chromosome coding is used to resemble the spatial arrangement of actuators. Several typical cases are analyzed, in which the fitness objectives are composed of maximum acceleration response and maximum inter-story angle, while the structure is controlled by certain actuators. The results demonstrate that the proposed method is suitable and effective.%研究地震激励作用下主动控制结构的作动器优化布置,基于等效激励法构造了随机激励,应用状态空间控制算法进行了求解.针对作动器优化布置问题提出了基于遗传算法的优化方案,即利用遗传算法的0,1染色体编码模拟作动器的楼层空间布置,实现了作动器数目限定条件下,以楼层最大加速度和层间位移角组合为控制目标函数的作动器最优布置.仿真分析表明,该优化方法适应性强,效果显著.【期刊名称】《中山大学学报(自然科学版)》【年(卷),期】2013(052)002【总页数】4页(P129-132)【关键词】状态空间控制;等效激励法;遗传算法;作动器优化布置【作者】毛克阳;孙作玉;燕乐纬;王晖【作者单位】广州大学土木工程学院,广东广州 510006【正文语种】中文【中图分类】TU311.3;O324主动控制是应用现代控制理论[1],对结构动力响应进行控制的有效措施。
阅读材料: 极点配置设计状态反馈控制器的算法工程实践中,系统的动态特性往往以时域指标给出,比如要求超调量小于等于多少,超调时间不超过多少,阻尼振荡频率不大于多少等。
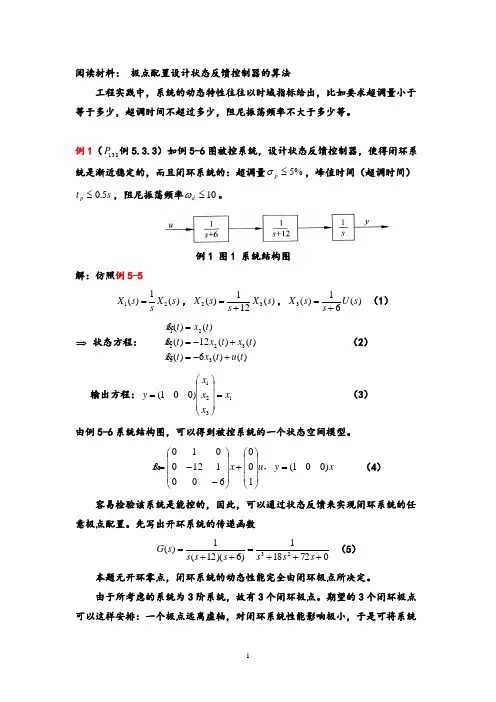
例1(138P 例5.3.3)如例5-6图被控系统,设计状态反馈控制器,使得闭环系统是渐近稳定的,而且闭环系统的:超调量%5≤p σ,峰值时间(超调时间)s t p 50.≤,阻尼振荡频率10≤d ω。
例1 图1 系统结构图 解:仿照例5-5 )(1)(21s X s s X =,)(211)(32s X s s X +=,)(61)(3s U s s X += (1) ⇒ 状态方程: )()(6)()()(12)()()(3332221t u t x t xt x t x t xt x t x+-=+-== (2) 输出方程:1321)001(x x x x y =⎪⎪⎪⎭⎫⎝⎛= (3)由例5-6系统结构图,可以得到被控系统的一个状态空间模型。
x y u x x)001(1006001120010=⎪⎪⎪⎭⎫ ⎝⎛+⎪⎪⎪⎭⎫ ⎝⎛--=, (4) 容易检验该系统是能控的,因此,可以通过状态反馈来实现闭环系统的任意极点配置。
先写出开环系统的传递函数 072181)6)(12(1)(23+++=++=s s s s s s s G (5) 本题无开环零点,闭环系统的动态性能完全由闭环极点所决定。
由于所考虑的系统为3阶系统,故有3个闭环极点。
期望的3个闭环极点可以这样安排:一个极点远离虚轴,对闭环系统性能影响极小,于是可将系统近似成只有一对主导极点为22,11ζωζωλ-±-=n n j 的2阶系统。
ζ—2阶系统的阻尼比; n ω—2阶系统无阻尼自振频率。
由关系式: %5e 21/≤=--ξξπσ,s 5.012≤-=ζωπn p t (6)(参见《自动控制技术》,吴舒辞,中国林业出版社,2000年4月,37P 表2.5)当取 10707021≥=≥n ωζ,.,07.7≥n ζω时,满足上述条件。
智能柔性结构振动主动控制中枢驱动器的最优配置
杜立群;颜云辉
【期刊名称】《机械科学与技术》
【年(卷),期】1999(018)004
【摘要】从振动主动控制系统的振动能量和控制能量的角度出发,应用最优控制
理论,对智能柔性结构振动主动控制中驱动器的最优配置策略进行了研究,给出了相应的控制规律。
为了获得最佳的控制效果,引入了改进的基因遗传(GA)算法,并以悬臂梁为例,讨论了压电驱动器的位置,数量,配置方式以及控制增益对智能柔性结构振动主动控制效果的影响,为智能梁的结构设计奠定了理论基础。
【总页数】4页(P528-531)
【作者】杜立群;颜云辉
【作者单位】东北大学;东北大学
【正文语种】中文
【中图分类】TB535
【相关文献】
1.作动器最优配置的柔性结构振动主动控制 [J], 高维金;王亮;刘永光
2.基于音圈作动器的大型柔性结构振动主动控制 [J], 安增勇;吴成松
3.基于μ综合的压电柔性结构振动主动控制 [J], 胡俊峰;张宪民
4.智能结构振动主动控制中驱动器的最优配置 [J], 杜立群;颜云辉;王德俊
5.配置压电传感器/驱动器的柔性结构振动主动控制研究 [J], 何丽丽;张京军;王二成;高瑞贞
因版权原因,仅展示原文概要,查看原文内容请购买。
第18卷第6期系统仿真学报©V ol. 18 No. 6 2006年6月Journal of System SimulationJun., 2006基于特征结构配置的结构主动控制基于特征结构配置的结构主动控制及仿真及仿真王国胜1吕强1梁冰2段广仁2(1.装甲兵工程学院控制工程系, 北京 100072;2.哈尔滨工业大学控制理论与制导技术研究中心, 哈尔滨150001)摘要考虑了具有最优控制的结构主动控制问题目的是在系统满足闭环特性的前提下设计状态反馈控制器使得系统性能泛函极小化利用特征结构配置方法提供的自由度给出了性能泛函的显示参数化表示从而该问题转化为带有约束条件的优化问题参与优化的变量仅为一组参量并给出了求解该优化问题的算法该算法直接基于结构系统矩阵故其简单性为工程应用提供方便地震作用下对三层剪切结构建筑模型进行仿真分析结果表明所提结构主动控制方法的有效性关键词结构系统主动控制特征结构配置地震控制优化中图分类号TP13; TP271 文献标识码 A 文章编号1004-731X (2006) 06-1605-04 Structural Active Control Based on Eigenstructure Assignment and Its SimulationsWANG Guo-sheng1, LV Qiang1, LIANG Bing 2, DUAN Guang-ren 2(1.Department of Control Engineering, Academy of Armored Force Engineering, Beijing 100072, China;2.Center for Control Theory and Guidance Technology, Harbin Institute of Technology, Harbin 150001, China)Abstract: The design of structural active control with minimum control effort was investigated. The aim is to design a statefeedback controller, that the closed-loop system has desired eigenvalues, and a system performance function is optimized. By utilizing design degrees of freedom offered by parametric eigenstructure assignment, a parametric expression for the system performance index was proposed. Thus the optimization problem was changed into a minimization problem with someconstraints and the optimized variables are a group of parameters. An algorithm was proposed for this minimization and utilized the original system data, and thus it is simple to use in applications. A three-story shearing model under earthquake excitation was analyzed by using the proposed algorithm and the simulation results show the effect of this algorithm.Key words: structural systems; active control; eigenstructure assignment; earthquake control; optimization.引言自从1972年美国Yao[1]结合现代控制理论提出了土木工程结构振动控制的概念开创了结构振动的主动控制研究的历程结构振动控制从理论到应用都取得了很大进展结构振动控制方法按照控制系统有无能源输入分为主动控制被动控制半主动控制和混合控制等其中主动控制是一种积极的抗振手段具有效果好适用范围广等优点成为国内外相关领域研究的前沿课题[2-3]近30年来应用和发展起来的适用于土木结构的主动控制算法主要包括二次型最优控制独立模态最优控制极点配置和滑动模态控制等极点配置或特征结构配置作为土木工程结构的主动控制算法之一虽然很早被提出但在土木结构领域中的应用却很少可查到的文献很少见文献[4]本文则把特征结构配置参数化方法[5-6]和最优控制问题相结合引入土木结构领域中考虑了具有最优控制力的结构主动控制问题其目的是设计状态反馈控制器使得闭环系统具有希望的极点外还使得系统性能泛函极小化利用收稿日期2005-04-28修回日期2006-03-03基金项目国家杰出青年基金(69925308)作者简介王国胜(1975-), 男, 河北唐山人, 讲师, 博士, 研究方向为线性系统理论结构控制理论鲁棒控制理论及应用; 吕强(1962-), 男, 黑龙江人, 教授, 博导, 博士, 研究方向为神经网络控制火力控制及应用特征结构配置方法提供的自由度给出了性能指标参数化表达式把优化问题最终转化为含有约束条件的极小化问题参与优化的变量为特征结构配置方法提供的自由参量给出了解决该优化问题的方法该方法直接基于结构系统矩阵不涉及系统增广或变换其简单性为工程应用提供了方便最后应用该算法设计了地震作用下三层剪切结构建筑模型的状态反馈控制器仿真结果表明了本文所提方法的有效性1 结构系统状态空间模型考虑在水平地震地面运动加速度)(tx g 作用下n 自由度的层间剪切型结构模型其运动方程为)()()()()(1txMItHutKXtXCtXM gn×−=++(1)式中)(tX )(tX 和)(tX 分别为各楼层相对于地面的位移速度加速度向量)(tu为r维控制力向量g x 为地震地面运动加速度M, C和K分别为结构系统的nn×阶质量矩阵阻尼矩阵和刚度矩阵H为控制力作用位置矩阵1×n I为n行元素均为1的列向量要求M和H均为满秩且矩阵对),(11HMCM−−−可控即nHMsICM n n=−−−×−][rank11C∈∀s(2)系统(1)的等价状态方程为)()()()(tx EtButAZtZg−+=(3)2006年6月 系 统 仿 真 学 报 Jun., 2006式中−−=−−C M K M I A n 110,=−H M B 10, =n I E 0,=X X Z 选取状态反馈控制律)()()(10t FZ t XF t X F u =+=][10F F F = (4)式中F 为n r 2×的反馈增益矩阵反馈控制作用是状态变量(速度和位移)的线性组合此时闭环系统为)()()(t xE t Z A t Z g c −=BF A A c += (5)2 特征结构配置控制算法因非亏损矩阵较亏损矩阵对系统参数扰动具有良好的鲁棒性故本文仅考虑闭环系统矩阵c A 的特征值为互异且自共轭情形记特征值为C ∈is n i 2,,2,1"=其对应的特征向量分别为iv ni 2,,2,1"=则有i c i i v A v s =, n i 2,,2,1"= (6)记),,,(diag 221n s s s "=Λ,][221n v v v V "= (7)则方程(6)等价于Λ=V V A c 或Λ=+V BFV AV (8)因矩阵对),(11H M C M −−−可控故对矩阵][11H M sI C M −−−−进行初等变换可得n n ×阶单模阵)(s P 和)()(r n r n +×+阶单模阵)(s Q 满足下式]0[)(][)(11I s Q H M sIC M s P =−−−−C ∈∀s (9)对)(s Q进行如下分块=)()()()()(22211211s Q s Q s Q s Q s Q (10) 其中)(11s Q 为r n ×阶矩阵从而有下述定理它给出了方程(8)中增益阵F 的参数化表达式其证明过程详见文献[5-6]关于更多的特征结构配置参数化方法及其应用研究可参见文献[7-13]定理1 给定二阶动力学系统(1)那么1) 若矩阵对),(11H M C M −−−可控则矩阵对),(B A 仍可控的充要条件是存在n n ×阶单模阵)(s H 和)()(r n r n +×+阶单模阵=)()()()()(22211211s L s L s L s L s L (11) 其中)(11s L 为r n ×阶矩阵满足下式]0[)()]()()([)(11112n I s L s Q sI K M s P s Q s H =−+−− (12)2) 若上述条件成立那么满足(8)的状态反馈增益阵F 可如下给出1−=WV F (13)式中1112211()[],()i n i ii i L s V v v v v g s L s ==" (14)][221n w w w W "=i i i i i i i g s KL M s P s Q s L s Q w )]()()()()([111222121−+= (15)其中g i , n i 2,,2,1"=是一组1×r 阶参量需满足0)()()()(det 221121111122111111≠n n n n n g s L s g s L s g s L g s L "! (16)j i s s =⇔ ji g g=n j i 2,,2,1,"= (17)综合上述特征结构配置参数化结果其优越性可以归纳为如下几点1) 该方法给出了满足方程(8)的所有状态反馈增益阵和闭环特征向量矩阵的参数化表示其含有的参量可进一步用来满足系统设计中其它性能指标如鲁棒性等2) 该方法计算过程中只涉及层间剪切型结构模型(1)中矩阵MC K 和H 并不涉及增广系统(3)中矩阵A 和B故便于工程应用3 最优结构主动控制设计本文考虑的具有最优控制力的结构主动控制设计问题可如下描述: 给定层间剪切建筑结构系统(1)以及一组自共轭且互异的复数C ∈is n i 2,,2,1"=确定形如(4)的状态反馈控制律)(t FZ u=对于任意正定对称矩阵R满足下述条件:1) 闭环系统矩阵c A 的特征值为C ∈is n i 2,,2,1"=2) ))((min F P tr ;其中正定矩阵P 是下述Lyapunov方程的解RF F PA P A Tc T c −=+. (18)不难发现上述优化问题等价于极小化下述二次型性能指标函数dt t Ru t u I T )()(0∫∞=(19)为求解问题ESA 我们首先给出如下结论给定系统(1)以及一组共轭互异的复数i s ,n i 2,,2,1"=, 若矩阵对),(11H M C M −−−和),(B A 均可控那么对于任一正定对称矩阵r r R ×∈R , 方程(18)中矩阵P 的解为122)()(21−×−+−=V s s g s RM s M g V P nn j i j j i T T i T (20) 式中)()()()()()(111222121i i i i i i s KL M s P s Q s L s Q s M −+= (21)矩阵V 由(14)决定r i g C ∈, n i 2,,2,1"=,为一组满足(16)和(17)的自由参量若记)(i g V V =由(20)易知))2,,2,1,((tr ))(tr(n i g P F P i "== (22)式中)2,,2,1,(n i g P i "=由(20)给出从而问题ESA 转化为))2,,2,1,,((tr min n i s g P i i "=,s. t . (16)和(17) (23)2006年6月 王国胜, 等基于特征结构配置的结构主动控制及仿真 Jun., 2006综上分析问题ESA的求解过程可归纳为如下步骤我们称之为特征结构配置方法(以下简称算法ESA)1) 算满足(9)的单模阵)(s P 和)(s Q 如(10)对)(s Q 进行分块2) 计算满足(12)式的单模阵)(s H 和)(sL 如(11)对)(s L 进行分块3) 设定ig n i 2,,2,1"=的参量表示根据(14)和(15)分别计算矩阵V 和W的参量表达式4) 求解优化问题(23)确定满足(16)和(17)的一组参量ig n i 2,,2,1"=将其代回上步计算矩阵V 和W5) 根据(13)计算状态反馈增益阵F4 数值仿真分析考虑如图1所示三层剪切型结构模型[2-3]该模型的结构参数取自三层Benchmark 模型但与标准Benchmark 不同的是采用在底层和中间层设置两个主动拉索控制装置结构系统矩阵为)kg (981981981=M−=001011H s/m)(N 3.43763.26.6163.27.4563.576.613.577.382⋅−−−−=C62.741 1.6410.3691.641 3.021 1.62410(N/m)0.369 1.624 1.333K −=−−× − ,假设待配置的特征值为i s 1432,1±−=is 4364,3±−=is 7296,5±−=根据算法ESA有如下结果1) 由奇异值分解易算得满足(9)的单模阵)(i s P 和)(i sQ 6,,2,1"=i 并如(10)对)(i s Q 进行分块;2) 由奇异值分解易求得满足(12)的单模阵)(i s H 和)(i sL 6,,2,1"=i 并如(11)对)(i s L 进行分块;3) 设定=i i i b ag 6,,2,1"=i 由(14)和(15)算得+−+−−−+−−−−++++++−++=−11111111111141)4539.00352.0()0658.03754.0()3566.00186.0()3050.00180.0()0661.014960.0()1538.00481.0()0315.00042.0()0266.00010.0()0246.00036.0()0210.00032.0()0023.00112.0()0098.00055.0(10b i a i b i a i b i a i b i a i b i a i b i a i v 21v v =+−++++−−++−−−+−−++−+−+=−33333333333343)1471.02036.0()0149.03493.0()0843.00867.0()1189.02153.0()0789.03285.0()0400.05438.0()0051.00027.0()0008.00080.0()0022.00016.0()0053.00020.0()0072.00028.0()0125.00008.0(10b i a i b i a i b i a i b i a i b i a i b i a i v43v v =−+−−+−−+++−+−++++−+−−−=−55555555555545)0741.02663.0()0496.01058.0()5560.00227.0()0645.02279.0()0799.04484.0()1424.02206.0()0035.00014.0()0009.00014.0()0076.00006.0()0030.00013.0()0063.00003.0()0033.00016.0(10b i a i b i a i b i a i b i a i b i a i b i a i v65v v =×−+−−−×−=−−−−1919191101)107765.21()2324.31087.3(10)1088.32297.3(10)108036.91(b i a i b i a i w 21w w =×++−−−×+=−−−−393113113103)102100.11()529.523967.8(10)4043.8529.52(10)109636.11(b i a i b i a i w 43w w =×+++−+×+=−−−−595115115105)102100.11()529.523967.8(10)529.524043.8(10)109636.11(b i a i b i a i w 65w w =4) 由matlab 优化工具箱中函数fmincon 算得优化问题(23)的优化参数为++==i i g g 9283.99984.91414.88380.721,−−+==i i g g 6354.44319.29593.61988.343,+−−==i i g g 0498.45629.71648.28124.365 将其代入第三步易得矩阵V 和W5) 根据(13)算得状态反馈增益阵为50.86260.95530.54900.13530.04420.0198100.4901 1.43260.77330.08910.11590.0786F −−−−− =−−−为进一步验证算法有效性选取输入地震波为El Centro (S00E)波图23和4给出了无控和F 控制结构系统的各层位移速度和加速度反应曲线图5给出了相应的控制力时程曲线仿真结果表明El Centro 地震输入下本文所提算法对结构的位移速度和加速度响应均能起到良好的控制作用同样的El Centro(S00E)地震波输入下图2表明采用本文设计控制律的结构位移要远小于无控下的结构位移图3表明采用本文设计控制律的结构速度要远小于无控下的结构速度图4表明采用本文设计控制律的结构加速度要远小2006年6月 系 统 仿 真 学 报 Jun., 2006图2 Elcentro 波作用下无控和F 控制的结构位移比较 图3 Elcentro 波作用下无控和F 控制的各层速度比较图4 Elcentro 波作用下无控和F 控制的各层加速度比较 图5 Elcentro 波作用下F 控制的各层控制力时程于无控下的结构加速度图5表明得到上述很好的控制效果却所采用了较小控制力5 结论将现代控制理论中的特征结构配置方法引入土木结构中考虑了结构系统的最优控制问题基于特征结构配置参数化方法提供的自由度将该问题转化为含有约束条件的优化问题并给出了一种简单有效的算法最后把利用该算法设计的控制器应用于地震作用下的三层剪切结构建筑模型并进行了仿真分析仿真结果表明El centro 地震输入下本文所提算法对结构的位移速度和加速度响应均能起到良好的控制作用同时也表明该特征结构配置方法在实际应用中的简单且有效性其在土木工程中的进一步应用将是今后研究工作的重点参考文献[1] Yao J T P. Concept of structure control [J]. ASCE Journal of StructureDivision (S0733-9453). 1972, 98(ST7): 1567-1574. [2] 欧进萍. 结构振动控制:主动半主动和智能控制 [D]. 北京: 科学出版社, 2003.[3] 张春巍, 欧进萍. 结构振动控制Benchmark 研究发展综述 [C]//现代土木工程理论与实践, 南京: 河海大学出版社, 2003: 489-496. [4] Mohamed A R, Horst H L. Structural Control by Pole AssignmentMethod [J]. Journal of the Engineering Mechanics Division (S0044- 7951). 1978, 104(5): 1159-1175.[5] Duan G R, Liu G P . Complete parametric approach for eigenstructureassignment in a class of second-order linear systems [J]. Automatica (S0005-1098). 2002, 38(4): 725-729.[6] Duan G R, Wang G S, Liu G P. Eigenstructure assignment in a class ofsecond-order linear systems: a complete parametric approach [C]// Proceedings of CACSCUK, Manchester, UK, 2002, 89-96.[7] Wang G S, Duan G R. Robust pole assignment via P-D feedback in aclass of second-order dynamic systems [C]//International Conference of Automation, Robots and Computer Vision, Kunming, China, 2004, 1152-1156. [8] Wang G S, Liang B, Duan G R Reconfiguring second-order dynamicsystems via state feedback eigenstructure assignment [J]. International Journal of Control, Automation, and Systems (S1598-6446). 2005, 3(1): 109-116.[9] 王国胜, 柴庆宣, 段广仁. 二阶动力学系统分散状态反馈特征结构配置 [J]. 哈尔滨工业大学学报, 2004, 36(12): 1585-1588. [10] 王国胜, 段广仁. 二阶动力学系统输出反馈特征结构配置 [J]. 系统工程与电子技术, 2004, 26(8): 1080-1083.[11] 王国胜, 王子华, 段广仁. 二阶动力学系统的干扰解耦与抑制 [J].系统工程与电子技术, 2004, 26(11): 1640-1643.[12] 段广仁, 王国胜. 矩阵方程EVJ 2+A VJ+CV=BW 的两种解析通解[J]. 哈尔滨工业大学学报, 2005, 37(1): 1-4.[13] Duan G R. Parametric eigenstructure assignment in second-orderdescriptor linear systems [J]. IEEE Transactions on Automatic Control (S0018-9286). 2004, 49(10): 1789-1795.。
基于极点配置算法的列车横向半主动悬挂自适应PID控制系统设计金光大;金炜东;李明【摘要】为了使PID控制器具备自适应能力,以适应列车受到外部环境扰动时产生的结构参数变化,使用了增量式数字PID控制器,将PID控制器与极点配置控制算法结合,利用极点配置算法在线实时优化kP,kI,kD参数,设计了自适应极点配置PID控制器,实现了kP,kI,kD参数的自动校正.最后给出基于极点配置自适应PID的高速列车半主动悬挂控制系统的设计方案,利用MATLAB-Simulink搭建仿真平台并进行仿真.仿真结果表明:基于极点配置算法的列车半主动悬挂自适应PID控制系统能够有效降低列车横向振动.【期刊名称】《河北工业科技》【年(卷),期】2014(031)004【总页数】5页(P271-275)【关键词】自适应;PID;悬挂系统;控制【作者】金光大;金炜东;李明【作者单位】西南交通大学电气工程学院,四川成都 610031;西南交通大学电气工程学院,四川成都 610031;西南交通大学电气工程学院,四川成都 610031【正文语种】中文【中图分类】TP29列车在国内外均是人员出行和货物运输的非常重要且不可或缺的交通工具,由于列车的广泛应用性,对列车运行的稳定性和舒适性提出了较高的要求,而横向振动正是这一问题的关键所在[1-2]。
在列车的运行中横向振动幅值的大小与轨道不平顺,牵引力和制动力都有着直接和间接的关系,克服和减小列车的多自由度随机振动一直以来是一个备受关注的问题[3-4]。
随着中国铁路运输的发展,列车逐步提高运行速度,这个问题变得更加重要,悬挂系统正是解决该问题的设备与装置。
悬挂系统是一系列装置的组合体,包括轮对与构架,构架与车体之间多个弹性元件和阻尼元件,起到减小振动的作用[5-6]。
列车的悬挂系统分为被动悬挂,半主动悬挂和全主动悬挂,其中被动悬挂系统通过弹性元件和阻尼元件储存和耗散振动能量,不需要外界提供能源,其参数和性能是不可调节的。
车辆主动悬架最优控制及悬架实验台研究湖南大学硕士学位论文车辆主动悬架最优控制及悬架实验台研究姓名:许昭申请学位级别:硕士专业:车辆工程指导教师:郭孔辉;宋晓琳20070420硕士学位论文摘要悬架是现代汽车上的重要总成之一。
它的功用是把路面作用于车轮上的各种力都传递到车架(或承载式车身)上,以保证汽车的正常行驶。
除此之外,还应具有良好的减振和缓冲能力,以缓和由于路面不平传给车架或车身的冲击载荷,保护车身、乘客和货物,抑制车轮的不规则振动。
由于外界干扰引起的车辆振动是影响车辆性能的重要因素。
车辆振动会影响车辆的行驶平顺性和操纵稳定性及车俩零部件的疲劳寿命,因此有效控制车辆振动成为提高车辆整体性能的一项具有实际意义的迫切任务。
为了提高悬架的性能,出现了主动悬架和半主动悬架。
车辆主动悬架设计的关键任务之一,就是要寻求一个能够为车辆提供良好性能的控制律。
许多学者提出了各种不同的控制理论,如:天棚阻尼控制、最优控制、模糊控制及神经网络控制等。
本文对这几种常见的控制算法进行了介绍并重点研究了随机线性最优控制算法。
最优控制的优点在于根据系统的状态变量并通过评价指标的最小化得到一个最优的综台性控制指标,状态变量可以根据需要进行选择,对控制变量的要求可以通过加权值进行协调,这非常适合于多目标的控制,如协调动载、操纵稳定性及舒适性等。
本文通过建立1/4车辆模型,应用最优控制理论进行了车辆主动悬架的LQG(Linear Quadratic Gaussian)控制器的设计,并在Matlab/Simulink环境中建立系统模型并进行仿真。
将仿真结果与被动悬架仿真结果进行对比分析。
仿真结果表明,具有LQG控制器的主动悬架对车辆行驶平顺性和乘坐舒适性的改善有良好的效果;对操纵稳定性的提高在低频区也有较好的效果。
各种主动悬架控制算法层出不穷,但往往理论研究有余、实际验证不足。
悬架实验台具有计算机仿真和道路实验不可比拟的优势,对悬架性能的检测和控制算法的实验研究意义重大。