大纯滞后过程特性Smith预估控制
- 格式:doc
- 大小:165.50 KB
- 文档页数:6
软件设计报告——Smith纯滞后补偿PID 控制塔顶轻组分含量、继电法整定PID参数目录目录 (2)一、题目 (3)二、原理 (4)1、Smith纯滞后补偿控制原理 (4)2、具有纯滞后补偿的数字控制器 (4)3、数字Smith预估控制 (5)4、继电法整定PID参数 (5)5、继电法整定PID参数的计算 (7)三、程序设计 (8)1、程序设计流程图 (8)2、程序设计详单 (10)四、结果展示与分析 (11)1、系统控制效果 (11)2、系统参数变化的控制结果 (11)五、体会 (15)六、参考文献 (15)一、题目题目5:以中等纯度的精馏塔为研究对象,考虑到不等分子溢流的影响和非理想的汽液相平衡,可以得到塔顶产品轻组分含量Y 与回流量L 之间的传递函数为:s e s s s s L s Y 12)15.17)(13.28()19.0(4.3)()(-⋅+++= 控制要求:1、采用Smith 纯滞后补偿PID 控制算法将塔顶轻组分含量控制在0.99。
2、采用继电法整定PID 参数。
3、整定效果验证:当被控过程参数时变时,如滞后时间有12→24,开环增益由3.4→6时,讨论PID 控制的响应速度及鲁棒性问题,考察当系统参数发生变化时,上述PID 参数是否选取合适。
二、原理1、Smith 纯滞后补偿控制原理在工业过程控制中,由于物料或能量的传输延迟,许多被控对象具有纯滞后。
由于纯滞后的存在,被控量不能及时反映系统所受到的干扰影响,即使测量信号已到达控制器,执行机构接受控制信号后迅速作用于对象,也需要经过纯滞后时间τ以后才能影响到被控量,使之发生变化。
在这样一个控制过程中,必然会产生较明显的超调或震荡以及较长的控制时间,使Smith 就这个问题提出了一种纯滞后补偿控制器,即Smith 补偿器。
其基本思想是按照过程的动态特性建立一个模型加入到反馈控制系统中,使被延迟了τ的被控量提前反映到控制器,让控制器提前动作,从而可明显地减少超调量,加快控制过程。
目录1.引言 (3)1.1 概述 (3)1.2 毕业设计(论文)的主要内容 (3)2.Smith预估器的理论知识 (4)2.1 Smith预估器的模拟补偿控制原理 (4)2.2 数字Smith预估系统 (5)3.数字PID控制器 (7)3.1 序言 (7)3.2 模拟PID控制器 (7)3.3 数字PID控制器 (7)3.4 PID控制参数的整定 (10)3.4.1 绪论 (10)3.4.2 采样周期T的选取。
(10)3.4.3 PID控制参数的整定方法 (10)4.数字Smith 预估器 (12)4.1 介绍数字PID控制算法的几种发展 (12)4.1.1 积分分离的PID算式 (12)4.1.2带有死区的PID控制算式 (12)4.1.3微分先行的PID控制算式 (13)4.1.4 时间最优PID控制 (13)4.2 数字Smith预估器的计算机实现 (14)4.3 数字Smith预估控制算式的推导 (15)5.软、硬件设计及调试.................................................................................. 错误!未定义书签。
5.1 硬件设计部分.................................................................................. 错误!未定义书签。
5.1.1设计接线图.........................................................................错误!未定义书签。
5.1.2 控制参数的计算....................................................................错误!未定义书签。
5.2 软件设计部分..................................................................................错误!未定义书签。
Smith预估器在轧制过程监控AGC的应用摘要针对板带轧制过程监控AGC系统,给出的系统的传递函数结构框图。
提出了带钢样本长度跟踪的概念,解决了传统算法中滞后时间随轧制速度变化这一问题。
将Smith预估控制方法用于监控AGC系统,给出了调节器分别为比例和积分形式下的控制率。
控制算法表明,无论是比例还是积分控制器,只要系统的放大倍数选择合适,控制器的第一步就可以将误差完全消除。
通过对这两种控制算法的动态和稳态特性进行分析比较,积分控制算法具有更大的灵活性和更高的静态精度。
与传统控制方法相比,本文提出的算法即有非常快的响应速度,又具有较高的静态控制精度。
1 引言在轧钢过程中,好多控制对象存在着严重的滞后时间。
这种纯滞后往往是由于物料或能量的传输过程引起的,或者是由于过程测量传感器的客观布置引起的。
从控制理论可知,对象纯滞后时间τ的存在对控制系统是极为不利的。
它使控制系统的稳定性降低,特别是衡量纯滞后对系统影响程度的特性参数τ/T≥0.5的对象(这里T为对象的时间常数),若采用常规PID控制是很难获得良好控制质量的。
关于大滞后控制系统方面,虽然国内作过不少研究工作,但在工程实践上有效的方法还不多。
在美国、日本、德国和我国使用较多的一种方法是纯滞后补偿。
这种方法不但采用专用补偿装置用于模拟控制,而且较普遍地采用计算机程序来实现,用于离散控制系统,如日本山武-Honeywell公司的TDCS-3000系统中就把这种纯滞后补偿控制作为通用的标准控制规律,并以专用程序来实现。
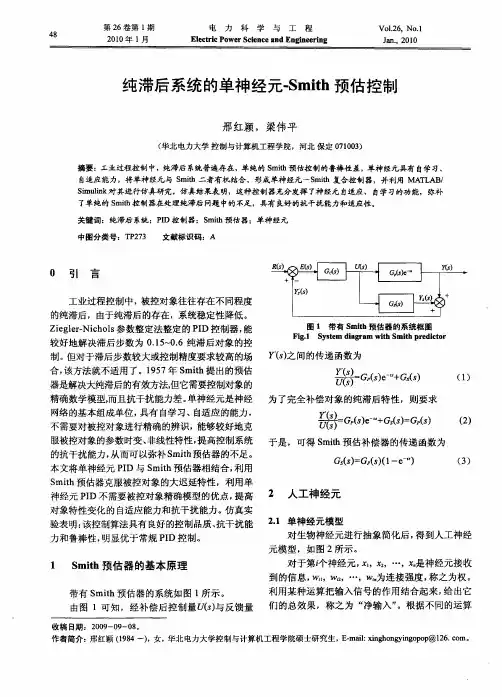
2大滞后补偿原理为了便于说明问题,我们先假设一个如图1所示的单回路控制系统。
图中G c(s)表示调节器的传递函数,G p(s)e-τ s表示对象的传递函数,其中G p(s)为对象不包含纯滞后部分的传递函数,e-τ s为对象纯滞后部分的传递函数。
图1 常规的反馈控制系统图1的闭环传递函数为:s p c sp c S e s G s G e s G s G s G ττ−−+=)()(1)()()( (1)系统传递函数分母中包含有纯滞后环节e -τ s ,使系统的稳定性降低,如果τ足够大的话,系统是不稳定的。
《计算机控制》课程设计报告题目: Smith预估器控制设计姓名:《计算机控制》课程设计任务书指导教师签字:系(教研室)主任签字:2012年7月5 日Smith 预估器控制设计一、实验目的通过混合仿真实验,学习并掌握用于具有纯滞后系统的纯滞后补偿(Smith预估器控制)的设计及其实现。
二、实验内容被控对象为-512()2se G s s =+, 1.0s T =画出系统框图,设计Smith 数字预估器。
三、控制系统仿真 1.方案设计已知纯滞后负反馈控制系统,其中图1.其中D(s)为调节器传递函数,-512()2se G s s =+为对象传递函数,其中-5()sO G s e 包含纯滞后特性,纯滞后时间常数5τ=。
系统的特征方程为:5121()()1()02se D s G s D s s -+=+=+由于闭环特征方程中含有-5s e 项,产生纯滞后现象,/5/150.5m T τ==≥,采用常规的PID 控制会使系统稳定性变差,甚至产生振荡。
为了改善系统特性,引入Smith 预估器,使得闭环系统的特征方程中不含有-5s e 项。
Smith 纯滞后补偿的计算机控制系统:图 2.上图所示ZOH 为零阶保持器,传递函数为:se s G Tsh --1)(=,并且有:lT =τ(l为大于1的整数,T 为采样周期)。
由已知可知, 1.0T s =,则551l Tτ===。
2.负反馈调节器D(z)的确定D(z)为负反馈调节器,通常使用PID 控制规律。
使用扩充响应曲线法对数字PID 控制器进行参数整定。
扩充响应曲线法是在模拟PID 控制器响应曲线法的基础上推广应用到数字PID 控制器参数整定的方法。
扩充响应曲线法是用于具有纯滞后的一阶对象,由前面分析和已知: 1.0T s =,5τ=,5l =,1m T =,因此依据课本128页表4.2扩充响应曲线法整定PID 参数表选择数字PID 参数计算公式,由于1=0.25Tτ=,则选择控制度为1.20,控制规律为PI 控制,因此选定PI 参数为:0.78()pmK T τ=3.60iT τ=所以有:0.156p K = 18i T = 则控制器的传递函数为:i 110.1560.00867()(1)0.156(1)T 18p s D s K s s s+=+=+=⋅ 将得到的模拟控制器用一阶后向差分法离散化得到:1-1-1--1-10.7-717.0)-1(1|)()(1-z z z T T K s D z D i p Tz s =⋅+===】【 3.Smith 补偿器)z D (τ的确定Smith 纯滞后补偿的计算机控制系统的框图:图 3.sT Ks G m O ⋅+=1)( lT ≈τ spes G s G τ-)()(=s m Tsso h e s T s e K e s G s G s G ττ---)1()-1()()()(+==)-1)(()(-s p e s G s D ττ=)-11--11)(-1)(z -K(1 ])1(1[)-1)(z -K(1 )]-1()1()-1([)]([)(1--1--1--1---z ezz s T s Z z e s T s e K Z s D Z z D mT T lm ls m Ts =+=+==τττ令mT -T ea =,)-1(-mT T eK b =则有1--1--1)-1()(az z bz z D l =τSmith 预估器(纯滞后补偿器)的框图:图 4.)-1()()(-1l z z C z C =)()()az -(1)()z -(1c(k)1-11-1-l k u bz k c k c ==最后解得)1-()1-()()-(-)()(1111k ac k bu k c l k c k c k c +==由上一步所得的数据: 1.0T s =,5τ=,5l =,1m T =,12K =解得如下数据:1---110.368mT T a ee e ====1--1(1-)12(1-)7.584mT T b K e e ==⨯=则-1-5-17.584(1-)()1-0.368z z D z zτ=1111()()-(-5)()7.584(-1)0.368(-1)c k c k c k c k u k c k ==+由此可得到:11()7.584(-1)0.368(-1)-(-5)c k u k c k c k =+由此可见,Smith 补偿器的差分方程有1(-5)c k 项,即存在滞后5拍的信号,因此产生纯滞后信号对纯滞后补偿控制是至关重要的。
基于两级Smith预估的纯滞后系统串级模糊控制仿真Simulation of Cascade Fuzzy Control Method for Pure Lag System Based on Two LevelSmith Predictors摘要在工业过程中,纯滞后系统普遍存在。
针对副回路中含有纯滞后的串级控制系统,对典型的PID串级控制系统加以改进,提出基于主副回路Smith预估补偿的串级模糊控制方法,在主副回路分别加入Smith预估器,并利用模糊控制器为调节器。
仿真结果表明,该种控制方法相比传统的PID串级控制方法具有更优的动态特性和鲁棒性。
关键词:串级模糊控制系统;纯滞后;Smith预估器AbstractThe large time-delay systems widely exist in industry process.For the pure lag which exists in the inner loop of cascade control systems,the cascade fuzzy control method based on Smith predictors is proposed.Two different Smith predictors are added in the main and inner of the system separately and Fuzzy controller is used as the main controller.Simulation result shows that the proposed method is much better than the traditional PID cascade control method in dynamic performance and robustness.Keywords:Cascade fuzzy control system; Pure lag; Smith predictor目录摘要 (Ⅰ)Abstract (Ⅱ)1 概述 (1)1.1 问题提出 (1)1.2 历史回顾 (2)1.3 论文贡献 (3)1.4 结构及内容 (3)2 纯滞后串级控制系统设计理论方法 (4)2.1 串级控制系统 (4)2.2 Smith 预估器 (6)2.3 纯滞后补偿控制系统 (9)2.4 自适应控制 (10)3 两级Smith预估补偿器的设计 (14)3.1 两级Smith预估补偿器的设计 (14)3.2模糊控制器的设计 (15)3.3 算法仿真研究 (19)4 纯滞后串级控制系统新型控制算法的设计 (23)4.1 新型控制算法的设计 (23)4.2 仿真分析 (26)5 结束语 (31)5.1论文贡献 (31)5.2今后的工作方向 (31)参考文献 (32)1 概述在工业生产过程中,滞后是广泛存在的。
绪论在现代科学的众多领域中,纯滞后对象的控制一直是人们研究的重要课题。
早期的研究主要是运用线性系统的经典方法对纯滞后系统进行分析设计。
譬如运用法分析纯滞后系统的稳定性问题,用近似方法将纯滞后环节近似为线性系统进行根轨迹的分析综合等。
但总的来说,当系统滞后时间较小时,只要我们设计时给予充分的考虑就可以了。
这时实际的控制效果不会与设计要求相去甚远。
对于滞后时间相对较大的系统,提出了预估补偿的方法,通过补偿环节来消除或减弱闭环系统中纯滞后因素的影响。
只要对象的模型较精确,方法的效果是比较理想的。
上世纪80年代起,随着自动控制理论、实践的深入发展和广泛应用,最优控制、鲁棒控制、变结构控制、H 控制以及预测控制等现代控制理论也逐步地应用到纯滞后的系统中来,并取得了一定的成果。
近几年来,以模糊控制技术、神经网络、专家系统和遗传算法为主要内容的智能控制技术,得到了充分的发展和广泛的应用。
尤其是它与传统的控制技术相结合,成功地解决了采用传统控制技术难以控制的控制对象(特别是对象模型难定的情况),在工程应用中有着强大的生命力并得到了广泛的应用。
本文通过纯滞后工艺过程描述了纯滞后系统的特性,从这个特性可以知道被控对象大多数都有纯滞后特性。
根据纯滞后控制系统的基本特点和纯滞后控制系统的设计以及纯滞后控制系统控制器参数整定等基础知识,并通过实例常规模糊控制器在纯滞后系统中的应用来理解和深化对纯滞后控制系统的理解。
1 纯滞后理论概述1.1 纯滞后相关定义及其工艺过程1.1.1 纯滞后相关定义所谓纯滞后是一种时间上的延迟,这种延迟是从引起动态要素变化的时刻到输出开始变化的时刻的这一段时间。
存在时间延迟的对象就称为具有纯滞后的对象,简称为纯滞后对象或滞后对象,实际被控对象大多数都有纯滞后特性。
被控对象时滞与其瞬态过程时间常数值比较大,采用通常的控制策略时,不能实现系统的精度控制,甚至会造成系统不稳定。
通常认为当被控对象时滞与其瞬态过程时间常数之比大于0.3时,被控系统为纯滞后系统。
摘要大迟延对象的控制一直是控制领域研究的焦点问题。
加热炉温度控制便属于这类复杂的控制对象。
传统的加热炉温度控制系统采用的是原料油出口温度同燃料油流量或同炉膛温度的串级控制,但由于燃料油流量存在波动,使得温度控制效果较差。
而且由于近年来炉膛改造,炉膛容积增大,使得控制系统主副被控对象均存在较大的时间滞后。
对于无滞后或滞后比较小的系统,通常采用PID控制。
对于大滞后系统,PID 控制效果并不好,需要另加补偿,因此提出了Smith预估补偿控制系统。
而 Smith 预估算法则在模型匹配时具有好的性能指标 ,但是由于这种算法严重依赖模型的精确匹配 ,而在实际中这是很难做到的 ,当模型失配时,Smith 预估算法就难以取得良好的控制效果,因此提出了改进型Smith控制系统。
本文研究的重点是设计与实现适用于燃烧控制过程的控制规律和控制算法。
具体讨论了纯滞后系统的Smith预估器及工程实现方法,着重对这种控制算法进行了较深入的讨论,并提出了一种改进型Smith预估控制器,该控制器把自适应控制与史密斯预估器有机地结合起来,实现对控制系统的参数自整定,而且还通过仿真对设计和改进的结果进行了分析。
仿真实验中,若采用PID控制算法,系统会出现较大的超调量,采用史密斯预估补偿控制没有超调量。
若保持控制器和模型的参数不变,改变对象参数,使估计模型与之失配,此时史密斯预估算法出现振荡,系统稳定性被破坏。
改进型Smith算法不仅能够保持系统的稳定,而且振荡次数少,收敛速度快。
关键词:加热炉;增益自适应;史密斯预估器第一章 绪论1.1 研究的背景及意义加热炉温度控制系统为一个大滞后的系统,改变传统的控制方式,采用温度、流量串级控制,并把煤气热值和烟气残氧检测量引入控制系统,对煤气和空气的配比值进行优化、调节,实现了加热炉高效燃烧控制、温度迅速反应控制。
在纯滞后过程中,由于过程控制通道中存在的纯滞后,使得被控量不能及时反映所承受的扰动。
过程控制课程设计---双容水箱Smith预估控制班级姓名学号指导老师日期扬州大学信息工程学院目录一、课程设计意义和目的 (2)二、课程设计设备 (2)三、课程设计原理 (4)四、课程设计步骤 (6)五、注意事项 (8)六、实验结果 (8)七、心得体会 (11)八、参考文献 (12)一、课程设计意义和目的1、了解纯滞后过程及其影响2、学习smith控制的原理3、掌握smith控制器的整定方法二、课程设计设备1、四水箱实验系统DDC实验软件软件功能说明:四水箱DDC实验软件的核心调度程序实现了数据的采集和输出、数据的实时记录以及实时监控。
同时,四水箱DDC实验软件为学生在四水箱过程控制实验装置上进行实验提供了友好的人机交互界面,包括:首页界面、实验界面、控制器界面、趋势界面和I/O设置界面。
通过这些友好的界面,学生可以在过程控制实验装置实现经典和先进的控制方案。
如上图所示,首页界面为整个软件的导航界面,当软件正确安装并正常启动后,将进入此画面,其主要功能有:2、PC机(Windows 2000 Professional 操作系统)三、课程设计原理1、 纯滞后过程某些过程在输入量改变后,输出变量并不立即改变,而要经过一段时间才反映出来,纯滞后就是指在输入变量变化后,看不到系统对其响应的这段时间。
当物质或能量沿着一条特定的路径传输时就会出现纯滞后,路径的长度和运动速度是决定纯滞后大小的两个因素。
纯滞后环节对任何信号的响应都是把它推迟一段时间,其大小等于纯滞后时间,纯滞后环节的数学描述为:()ss τ-= G(19-1)2、 Smith 预估算法设一个控制系统,对象特性为:()ss P P PC G G τ-=(19-2)这里将对象分成两部分P G 和sP τ-,设这两部分之间有变量B ,如果能将B 检测出来,则可以按下图构造简单的反馈控制系统图 19-1 理想的纯滞后过程的单回路控制如上图所示,由于B 信号没有滞后,所以系统响应将会大大地改善。
含有纯滞后系统的几种控制算法的比较与评述含有纯滞后系统的几种控制算法的比较与评述【摘要】针对时滞对象的控制问题,着重选取几种控制方法,论述了各种控制方法的原理和优缺点,比较控制性能,以期对含有大时滞的实际对象的控制起到方法上的指导作用。
【关键词】纯滞后Smith预估控制智能控制1纯滞后问题大家都知道,纯滞后在工业上是一种普通的现象。
例如冶金、玻璃、造纸工业中板材厚度的控制、加热炉、炉窖的传热,化工炼油生产中物料的传输,反应器的化学合成等系统都存在纯滞后。
在工业过程闭环控制系统控制回路中,若存在纯滞后,闭环特征方程中就存在纯滞后,由于纯迟延的存在使得被调量不能及时反映控制信号的动作,控制信号的作用只有在延迟了以后才能反映到被调量;另一方面,当对象受到干扰而引起被调量改变时,控制器产生的控制作用不能即时对干扰产生抑制作用。
因此,含有纯滞后环节的闭环控制系统必然存在较大的超调量和较长的调节时间。
纯滞后对象也因此而成为难控的对象。
本文针对时滞的控制问题,着重选取常用的几种控制方法,比较控制性能,以期对含有大时滞的实际对象的控制起到方法上的指导作用。
2时滞过程的各种控制方法2.1PID控制。
PID控制是迄今为止最通用的控制算法,大多数反馈回路都采用PID或其改进型来控制。
其控制规律为然而,PID在纯滞后系统中的应用是有一定限制的。
这是因为其控制效果无法通过反馈回路及时反馈,因而使得控制问题复杂化了。
2.2Smith预估控制及改进算法。
当前,含较大纯滞后的系统大多采用Smith 预估及其改进型来控制。
Smith预估器控制基本思路是,预先估计出过程在基本扰动下的动态特性,然后由预估器进行补偿控制,力图使被延迟了的t的被调量提前反馈到调节器,使调节器提前动作,从而明显地减小超调量和加速调节过程。
Smith控制系统最大的优点是将时滞环节移到了闭环之外,使控制品质大大提高。
过程控制系统课程设计题目之十三 大纯滞后过程特性Smith预估控制 对于一个大纯滞后过程特性的对象:sPCesssG10)12)(3(1)(,试设计一个Smith预估控制系统,并用SIMULINK和MATLAB程序仿真实现。当系统设定值R(s)为1时,调整PI参数,使过渡过程尽可能满意。(假设检测变送环节的传递函数为1);比较在预估模型有偏差时,在相同的输入条件下,与预估模型无偏差情况的仿真结果;如果系统有扰动信号F(s)为单位阶跃信号或SINS信号时,比较系统的仿真结果;如有可能,再试设计一种改进的Smith预估器。 实验报告要求: 1、供系统仿真图; 2、按照题目要求,给出每个实验的仿真结果图; 3、根据以上仿真结果,分析)(sGPC有滞后与无滞后情况下,PI参数整定的特点。 I
大纯滞后过程特性Smith预估控制 摘 要:Matlab 是一套高性能的数值计算和可视化软件。它集数值分析、矩阵计算、信号分析与图形 显示为一体,构成的一个方便的、界面友好的用户环境。历经二十几年的发展和竞争,现已成为国 际公认的最优秀的科技应用软件。Matlab 最突出的特点就是简洁、它用直观的、符合人们思维习惯 的代码、代替 C 语言和 FORTRAN 语言的冗长代码。为此,Matlab 获得了对应用学科的极强适应力。 在国内外高校、Matlab 已成为大学生,硕士生、博士生必须掌握的基本技能。在设计研究学位和工 业部门,Matlab 已经成为研究和解决各种具体工程问题的一种标准软件。Matlab 软件广泛用于数字 信号分析,系统识别,时序分析与建模,神经网络、动态仿真等方面有着广泛的应用。利用 Matlab 这个最优秀的科技软件,把计算机技术与信号分析紧密地结合起来,对信号进行分析处理仿真研究, 经实例验证, 取得了非常好的效果, 具有一定的实用价值。 本文控制系统为研究主体, 提出一种 Smith 预估控制算法,通过设计自适应非线性反馈回路来自适应调节参数,从而满足对象参数大幅度变化的要求。 关键词:Matlab;纯滞后;Smith 预估控制器;Simulink
Pure time-delay system control algorithm of Smith
Abstract:Matlab is a software.of high performance of numerical calculation and visualization It get numerical analysis, calculation and signal analysis and graphic display together, constitute a convenient, interface, user friendly environment. After 20 years of development and competition, has become internationally recognized the best technology application software. The most prominent feature of Matlab is concise, it use the people's thinking and habits of the visual code, instead of C language and FORTRAN language lengthy code.So, Matlab acquire the subject of application for science. Matlab,has become acollege students’, masters’ or doctors’ basic skills which must be grasp of both at home and abroad ,. In the design research degree and industrial department, Matlab has become the research and solve specific engineering problems are a standard software. Matlab software widely used in digital signal analysis, system identification, timing analysis and modeling, neural network, dynamic simulation, etc in a wide range of applications. The best use of Matlab software technology, computer technology and signal analysis closely together, the signal analysis simulation, and achieved very good results since it has certain practical value. This control system as a main body of research, and put forward a kind of Smith prediction control algorithm, and adapt to adjust the parameter through the design adaptive nonlinear feedback loop, and meet the requirements of an object parameter changes greatly. Key words:Matlab; Pure time-delay; Smith estimated controller; Simulink
1纯滞后产生的主要原因 1.物料及能量在管道或者容器中传输及运送需要时间; 2.物质反应、能量的释放及能量交换需要一定过程和时间; 3.设备和设备之间的串联需要许多的中间环节; 4.测量装置的响应时间; 5.执行机构的动作时间; 在控制对象调节通道、测量装置及执行机构等环节存在纯滞后时,控制系统闭环特征方程中就存在纯滞后因子,而且存在纯滞后的环节较多时,系统滞后时间也将随之增加。因此明显降低了系统的稳定性,而且纯滞后时间越长,系统稳定性就越差。由于纯 滞后的存在,调节作用不及时,导致被调节系统的动态品质下降。纯滞后越大,则系统的动态品质越差。 2史密斯预估器原理
2.1密斯预估器补偿原理 在单回路控制系统中,控制器的传递函数为D(s),被控对象传递函数为Gp(s)e-ts,被控对象中不包含纯滞后部分的传递函数为Gp(s),被控对象纯滞后部分的传递函数为e-ts。则系统的闭环传递函数为
(1) 由式(1)可以看出,系统特征方程中含有纯滞后环节,它会降低系统的稳定性。 史密斯补偿的原理是:与控制器D(s)并接一个补偿环节,用来补偿被控对象中的纯滞后部分,这个补偿环节传递函数为Gp(s)(1-e-ts),t为纯滞后时间,补偿后的系统如图1所示。
由控制器D(s)和史密斯预估器组成的补偿回路称为纯滞后补偿器,其传递函数为
(2) 根据图1可得史密斯预估器补偿后系统的闭环传递函数为
(3) 由式(3)可以看出,经过补偿后,纯滞后环节在闭环回路外,这样就消除了纯滞后环节对系统稳定性的影响。拉氏变换的位移定理说明e-s仅仅将控制作用在时间座标上推移了一个时间,而控制系统的过渡过程及其它性能指标都与对象特性为Gp(s)时完全相同。
图1 史密斯补偿后的控制系统 密斯预估器补偿原理 在单回路控制系统中,控制器的传递函数为D(s),被控对象传递函数为Gp(s)e-ts,被控对象中不包含纯滞后部分的传递函数为Gp(s),被控对象纯滞后部分的传递函数为e-ts。则系统的闭环传递函数为
(1) 由式(1)可以看出,系统特征方程中含有纯滞后环节,它会降低系统的稳定性。 史密斯补偿的原理是:与控制器D(s)并接一个补偿环节,用来补偿被控对象中的纯滞后部分,这个补偿环节传递函数为Gp(s)(1-e-ts),t为纯滞后时间,补偿后的系统如图1所示。
由控制器D(s)和史密斯预估器组成的补偿回路称为纯滞后补偿器,其传递函数为 3
(2) 根据图1可得史密斯预估器补偿后系统的闭环传递函数为 (3) 由式(3)可以看出,经过补偿后,纯滞后环节在闭环回路外,这样就消除了纯滞后环节对系统稳定性的影响。拉氏变换的位移定理说明e-s仅仅将控制作用在时间座标上推移了一个时间,而控制系统的过渡过程及其它性能指标都与对象特性为Gp(s)时完全相同。 2.2史密斯预估器的计算机实现 由图1可以得到带有史密斯预估器的计算机控制系统结构框图,如图2所示。 图中,H0(s)为零阶保持器,带零阶保持器的广义对象脉冲传递函数为 G‘(z)为被控对象中不具有纯滞后部分的脉冲传递函数,N=/T,是被控对象纯滞后时间,T是系统采样周期。 图2 史密斯补偿计算机控制系统 D’(z)就是要在计算机中实现的史密斯补偿器,其传递函数为 (4) 对于控制器D(z),可以采用如下方法确定:不考虑系统纯滞后部分,先构造一个无时间滞后的闭环系统(见图3),根据闭环系统理想特性要求确定的闭环传递函数为Φ(z),则数字控制器D(z)为 (5)
图3 理想闭环系统 3纯滞后对控制效果的影响 3.1系统仿真图 ①在没有纯滞后时整定调节器PI参数
滞后时间为0,PI整定参数P=4.7,I=3.9,阶跃输入信号
②具有纯滞后环节对控制效果的影响