矢量阵一种简单的相位误差校正方法
- 格式:pdf
- 大小:232.65 KB
- 文档页数:4

矢量网络分析仪使用说明书第一章前言1. E836B网络分析仪具有以下技术特点:①高性能测量接收机E8362A网络分析仪采用基于混频器的实现方式,使该仪表具有当今微波网络分析仪中最高的测量灵敏度度。
测量频率范围:10M~20GHz;接收机数量:4台接收机测量灵敏度:-120dBm接收机测量参数;幅度和相位。
迹线噪声:0.005dB(在中频带宽为10KHz时)②完整的测量能力该网络分析可以工作在以下测量状态:频域扫描状态:测量激励信号为功率固定,频率变化信号。
考察被测在不同频率激励状态下等离子参数的变化;功率扫描状态:测量激励信号为频率固定,功率扫描变化信号。
考察被测在不同功率激励状态下参数的变化;连续波状态:测量激励信号为频率固定,功率固定信号。
考察被测等离子在固定激励状态下,响应状态参数的波动变化,E8362A最大测量时间长度可达到3000秒;时间域测量状态:通过将被测的频率响应通过IFFT变化到时间域得到其时域冲击响应,考察被测等离子响应信号的空中分布特性。
E8362AIFFT运算点数为160001点,可保证时域测量的分辨率和测量时间宽度。
③强大的分析能力E8362A基于PC的window2000操作平台,可内置各种分析软件,不需要外置PC 进行数据处理,编程方式为COM/DCOM,保证测试的速度。
仪表内置嵌入、去嵌入及端口延伸等功能,可直接消除测量天线对测量结果的影响,或进行其它补偿运算处理。
④高测量速度E8262A高性能接收机可确保高测量精度的同时具有快测量速度,具体指标为:35us/测量点,14ms/刷新(400点)。
保证对被测等离子的瞬态响应进行捕捉分析。
⑤多测试状态同时完成E8262A可支持16个测试通道,各通道可工作在不同的测量状态。
利用该功能,可以综合不同分析方法从不同角度来对一个现象进行研究。
⑥良好的可扩展性E8263A采用开放的发射/接收组成框架,用户可以根据测量的具体要求改变仪表的测量连接状态,还可以把需要的外部信号处理过程组合到仪表内部,例如:当被测需要更大激励功率时,可将推动方法器连接到仪表相应端口,该放大器引起的测试误差可以通过仪表的校准过程消除。
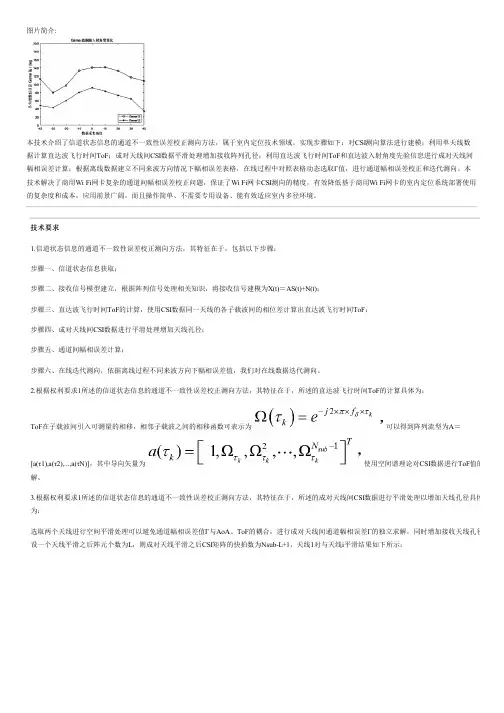
图片简介:本技术介绍了信道状态信息的通道不一致性误差校正测向方法,属于室内定位技术领域。
实现步骤如下:对CSI测向算法进行建模;利用单天线数据计算直达波飞行时间ToF;成对天线间CSI数据平滑处理增加接收阵列孔径;利用直达波飞行时间ToF和直达波入射角度先验信息进行成对天线间幅相误差计算;根据离线数据建立不同来波方向情况下幅相误差表格,在线过程中对照表格动态选取Γ值,进行通道幅相误差校正和迭代测向。
本技术解决了商用Wi Fi网卡复杂的通道间幅相误差校正问题,保证了Wi Fi网卡CSI测向的精度,有效降低基于商用Wi Fi网卡的室内定位系统部署使用的复杂度和成本,应用前景广阔,而且操作简单、不需要专用设备、能有效适应室内多径环境。
技术要求1.信道状态信息的通道不一致性误差校正测向方法,其特征在于,包括以下步骤:步骤一、信道状态信息获取;步骤二、接收信号模型建立,根据阵列信号处理相关知识,将接收信号建模为X(t)=AS(t)+N(t);步骤三、直达波飞行时间ToF的计算,使用CSI数据同一天线的各子载波间的相位差计算出直达波飞行时间ToF;步骤四、成对天线间CSI数据进行平滑处理增加天线孔径;步骤五、通道间幅相误差计算;步骤六、在线迭代测向,依据离线过程不同来波方向下幅相误差值,我们对在线数据迭代测向。
2.根据权利要求1所述的信道状态信息的通道不一致性误差校正测向方法,其特征在于,所述的直达波飞行时间ToF的计算具体为:ToF在子载波间引入可测量的相移,相邻子载波之间的相移函数可表示为可以得到阵列流型为A=[a(τ1),a(τ2),...,a(τN)],其中导向矢量为使用空间谱理论对CSI数据进行ToF值的求解。
3.根据权利要求1所述的信道状态信息的通道不一致性误差校正测向方法,其特征在于,所述的成对天线间CSI数据进行平滑处理以增加天线孔径具体为:选取两个天线进行空间平滑处理可以避免通道幅相误差值Γ与AoA、ToF的耦合,进行成对天线间通道幅相误差Γ的独立求解,同时增加接收天线孔径,设一个天线平滑之后阵元个数为L,则成对天线平滑之后CSI矩阵的快拍数为Nsub-L+1,天线1对与天线i平滑结果如下所示:4.根据权利要求1所述的信道状态信息的通道不一致性误差校正测向方法,其特征在于,所述的通道间幅相误差计算具体为:根据信号子空间与噪声子空间的正交关系构造目标优化函数,其中,θ0为已知直达波的入射角度AoA,τ0为权利要求2中计算得到的直达波飞行时间ToF,基于信号子空间与噪声子空间的正交原理,可以利用谱峰索或解析法对目标函数解得到两个通道幅相误差参数Γ,遍历所有天线就可以得出接收阵列对于参考天线的幅相误差,使用已知角度入射信号计算得到的通道幅相误差值建立不同来波方向对应的通道幅相误差表。

散射参量(S参量)设计与应用王绍金编写散射参量(S参量)设计与应用 (1)一、二端口网络参数 (2)1)Z参数 (2)2)Y参数 (3)3)h参数和ABCD参数 (3)二、散射参量的定义 (3)三、散射参量的物理意义 (6)五、Z参量与S参量之间的转换 (9)六、散射参量的测量 (9)网络仪系统组成原理 (10)标量网络分析仪 (10)矢量网络分析仪 (11)网络分析的校准方法 (11)1)误差修正基本概念 (11)2)单端口的反射测量的误差 (12)3)三项误差修正 (13)4)双端口误差修正 (14)七、散射参量测量实例(HP4195A) (15)一般的测量顺序 (15)HP4195A发送/反射测试装置 (15)MEASURING S-PARAMETERS(测量S-参数) (16)八、参考文献: (20)一、二端口网络参数为了有效地减少无源、有源器件的个数,避开电路的复杂性和非线性效应,简化电路输入、输出特性关系,可用网络模型来代替基本电路。
在射频电路设计中,最常用的就是双端口网络,包括衰减器、移相器、放大器、滤波器、匹配电路甚至混频器之内的很多电路都可以用它来描述。
下面将对它进行简单的介绍,并给出它的各种参数。
图1.1给出了二端口网络模型。
图1.1二端口网络在图1.1中,已经确定了一些电压、电流的方向和极性相关的基本规定。
正确的描述一个二端口网络需要确定其输入输出阻抗、正向和反向传输这四个参数。
根据不同的需要,人们定义了等价的几套参数来描述二端口网络。
1)Z 参数22212122121111i z i z v i z i z v +=+=矩阵形式为:⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡212221121121i i z z z zv v (1-1) 式中的每一个阻抗元素可以通过下面规则求得()m k i i v z k m nnm ≠==0 (1-2)这表明第m 个端口的输入电流i m 而且其它端口均处与开路状态(即 i k =0)时,第n 个端口测得的电压是v n 。

新技术介绍New Technology introduction 相位对焦PDAF(Phase Detection Auto Focus)所谓反差式对焦,就是基于镜头在不同位置上成像的画面有差异来找最佳聚焦点,镜头被马达驱动朝某个方向,当镜头移动到某一位置上时,对当前的图像的某个区域的数据分析计算,),并同时记录下镜头的位置,镜头被持续移动多段距离后得到一组数值,找到这组数字的最大值对应的镜头位置,驱动镜头回到该位置最终实现自动对焦。
远景近景衡量反差量的值一般称为FocusValue,目前手机各个平台普遍参考以下公式(m,n代表ROI区域的长宽)通常手机摄像头对焦时会有一个位置表来控制移动。
以MTK 平台为例,对焦时一般从镜头的第0步起始Pos.值按表对应的序号递增。
如图,在第4步200 Code 时FV 最大,第5步FV 开始下降。
手机在进行搜索时,一般发现有下降,会停止向前搜索。
然后通过曲线拟合算法计算出最清晰点。
手机厂商为了提高对焦速度,通常减13-18之间),提高马达每步code ,这样的做法往往会造成一个问题,有些位置无法准确对焦到最清晰点。
如图,实际最清晰点在第4步和第5步之间。
由于拟合算法只是理论估算的最清晰点,这个清晰点往往并不是最清晰的,精度随着步距变大而变小。
解像力变化曲线No.507092160200240280425FV.Pos.最清晰点数字化影像传感器发展到现在,这种对焦方式应用非常之广,在追求手机轻薄的今天,目前几乎所有的手机,平板摄像头,小型数码相机,都是采用这种对焦方式。
优点:成本低廉,主机只需要能分析图像数据的ISP或MCU,就能实现自动对焦,不需要额外的辅助设备或器件,模组体积可以做小。
基于图像处理,对焦点可以任意设置。
用户可以对画缺点:基于搜索算法,对焦时间长,对焦精度与时间成反比,想对焦精度高,必须要搜索更多的点,对焦总时间就会加大,而且每步对焦时间依赖于Sensor的FPS和马达的移动速度和稳理想薄透镜的一个经典物像共轭关系的光学公式:从设计上是已知的,拍摄时如果能从当前环境知道目标的物距或像距的任何一个数字,那么就能立即得到镜头应该朝那个方向移动和移动多少距离才能到焦点位置。