迷你型汽车多总线数据记录仪
- 格式:pdf
- 大小:706.63 KB
- 文档页数:18
一种多功能汽车行驶记录仪的嵌入式系统设计陈希球【摘要】汽车行驶记录仪是对车辆行驶速度、时间、里程以及有关车辆行驶的其他状态信息进行记录、存储,并可通过接口实现数据输出的数字式电子记录装置.本文详细论述了新型多功能汽车行驶记录仪的设计与实现, 并对记录仪今后的发展进行了展望.【期刊名称】《长江工程职业技术学院学报》【年(卷),期】2010(027)001【总页数】3页(P50-52)【关键词】ARM;嵌入式系统;汽车行驶记录【作者】陈希球【作者单位】长江工程职业技术学院,武汉,430212【正文语种】中文【中图分类】U463.7;TP316汽车行驶记录仪(又称汽车黑匣子)是一种使用在汽车上的数字式电子记录装置。
这种装置能对车辆的行驶速度、时间、里程以及有关车辆行驶的其他状态信息进行记录存储,并可通过接口实现数据输出。
汽车行驶记录仪的使用,对抑制疲劳驾驶、车辆超速等交通违章、约束驾驶人员的不良驾驶行为、保障车辆行驶安全以及道路交通事故的分析鉴定具有重要的作用。
本文根据汽车行驶记录仪国家标准GB/T19056-2003,开发设计了一种功能强大、性能稳定、体积小巧且适合安装的多功能汽车行驶记录仪,采用的是三星公司的32位嵌入式ARM处理器S3C2440和Linux操作系统,主要阐述了汽车行驶记录仪的硬件架构和软件系统设计。
1 基本功能根据国家颁布的汽车行驶记录仪的标准(GB/T 19056-2003),本系统主要具备以下功能:自检功能:记录仪在通电开始工作时,应首先进行自检,自检正常后应以绿闪信号及显示屏显示方式指示工作正常,如有故障则应以红闪信号及显示屏显示方式指示故障信息。
数据采集、记录和存储功能:能够对实时时间、日期、驾驶时间、车辆行驶速度、行驶里程等数据进行测量、记录和存储,并保证存储的数据在较长时间内不丢失。
需要被采集的输入信号包括三类:模拟信号输入、数字信号输入以及开关量信号输入。
数据处理功能:能够按照具体要求,对所采集到的数据实时进行处理,并在必要的情况下采取相应的措施对车辆进行管理。
每条报文中包含的数据可以分为七组,分组示例见表1。
第1组表示帧时间间隔;第2组表示此条报文通图1 系统整体流程
图2 转换进度
图3 车辆运行报文
2.数据处理功能
(1)原始报文格式分析 如果需要提取信息功能,首先需要了解原始报文的记录规则。
现在以周立功CAN 线记录仪采集的“*.asc ”格式报文为例进行分析,采集的一段车辆运行报文,如图3所示。
图5 周立功车载CAN-BUS 数据记录仪
图6 实验车辆
图7 该工况下车辆整体换挡次数
2.实验结果分析
通过运行该脚本会生成目标文件
结语
本文利用Python语言实现了车辆换挡次数统计的目的,大大减少了人工进行统计的工作量,并且比较灵
活,可以进行二次开发(提取其他报文的信息)。
经
试验测试,本系统能够有效、准确地对其换挡次数进
行统计,给数据分析人员提供便利。
参考文献
朱迪臣.现代电子技术在汽车上的应用及未来发展趋
势[J].时代汽车,2020(1):23-24.
2014.
图4 数据处理模块
组合完成后,将其重组的数据写入文件中。
2021年第 12 期 / 微信号 auto1950
◆广告 查询编号:8179。
Transporter电路图编号 4 / 112.2015数据总线联网自 2015 年 6 月起Transporter电路图编号 4 / 2SG0-004021215E 595B383B390B384B391J 428J 769J 770J 7880.35or/br T41/2can-l0.35or/swT41/3can-h0.35or/sw T8a 0.35or/br T8a 0.35gn/ge T8b /2/20.35gr/ws T12aa /1can-lT12ab /5can-l 0.35gr/rt T12aa /2can-hT12ab /12can-h0.35or/br T17m T12aa /5can-l 0.35or/sw T17m T12aa /12can-h0.35or/sw /90.35or/br /80.35ws/geT8b /3/30.35or/sw T9/90.35or/br T9/30.35or/sw T9/80.35or/brT9/5ws =白色sw =黑色ro =红色rt =红色br =褐色gn =绿色bl =蓝色gr =灰色li =淡紫色vi =淡紫色ge =黄色or =橘黄色rs =粉红色转向柱组合开关, 车距调节控制单元, 行驶换道助理系统控制单元, 行驶换道助理系统控制单元 2, 驱动 CAN 总线断路继电器E595- 转向柱组合开关J428- 车距调节控制单元J769- 行驶换道助理系统控制单元J770- 行驶换道助理系统控制单元 2J788- 驱动 CAN 总线断路继电器T8a - 8 芯插头连接, 黑色, 信号喇叭附近,双音喇叭T8b - 8 芯插头连接, 黑色T9- 9 芯插头连接, 黑色T12aa - 12 芯插头连接, 黑色T12ab - 12 芯插头连接, 黑色T17m - 17 芯插头连接, 红色, 左侧 A 柱上T41- 41 芯插头连接, 灰色B383- 连接 1(驱动系统 CAN 总线,High ),在主导线束中 B384- 连接 2(驱动系统 CAN 总线,High ),在主导线束中 B390 - 连接 1(驱动系统 CAN 总线,Low ),在主导线束中 B391- 连接 2(驱动系统 CAN 总线,Low ),在主导线束中Transporter电路图编号 4 / 3SG0-004031215B383B383B390B390E 313J 743D160D159J 623J 104J 2340.35or/sw*T10b 0.35or/br*T10b 0.35or/br *2T10a 0.35or/sw *2T10a 0.35or/br T10an /8can-l 0.35or/swT10an /7can-h0.35or/sw*T16m /6can-h/50.35or/br*T16m /7can-l/80.35or/sw *2T16m /6can-h/70.35or/br *2T16m /7can-l/80.35or/sw T10d 0.35or/br T10d 0.35or/br /100.35or/sw /90.35or/br T94/67can-l 0.35or/sw T94/68can-h 0.35or/sw T38a /11can-h 0.35or/brT38a /10can-l0.35or/br T50/500.35or/sw T50/49ws =白色sw =黑色ro =红色rt =红色br =褐色gn =绿色bl =蓝色gr =灰色li =淡紫色vi =淡紫色ge =黄色or =橘黄色rs =粉红色选档杆, ABS 控制单元, 安全气囊控制单元, 发动机控制单元, 双离合器变速箱机电装置E313- 选档杆J104- ABS 控制单元J234- 安全气囊控制单元J623- 发动机控制单元, 发动机舱电控箱内J743- 双离合器变速箱机电装置T10a - 10 芯插头连接, 棕色, 发动机舱电控箱内T10an - 10 芯插头连接, 黑色T10b - 10 芯插头连接, 红色, 发动机舱电控箱内T10d - 10 芯插头连接, 蓝色, 发动机舱电控箱内T16m - 16 芯插头连接, 黑色, 电副变速箱控制单元上T38a - 38 芯插头连接, 黑色T50- 50 芯插头连接, 黄色T94- 94 芯插头连接, 黑色B383- 连接 1(驱动系统 CAN 总线,High ),在主导线束中 B390 - 连接 1(驱动系统 CAN 总线,Low ),在主导线束中 D159- 连接(High 总线),在发动机舱导线束中 D160- 连接(Low 总线),在发动机舱导线束中*- 仅用于带有柴油发动机的汽车*2- 仅用于带汽油发动机的汽车Transporter电路图编号 4 / 4SG0-004041215B383B383B390B390J 431J 446J 250J 4920.35or/sw T26c /20.35or/br T26c /30.35or/sw T16h /6can-h0.35or/br T16h /15can-l 0.35or/br T47a /330.35or/sw T47a /340.35or/swT8ad/4can-h 0.35or/br T8ad /2can-l0.35or/br*T5v T8ag 0.35or/br *2/40.35or/sw*T5v T8ag 0.35or/sw *2/30.35or/sw*T17f /50.35or/br*T17f /20.35or/sw /70.35or/br/6ws =白色sw =黑色ro =红色rt =红色br =褐色gn =绿色bl =蓝色gr =灰色li =淡紫色vi =淡紫色ge =黄色or =橘黄色rs =粉红色减震电子调节控制单元, 大灯照明距离调节控制单元, 驻车距离报警控制单元, 全轮驱动控制单元J250- 减震电子调节控制单元J431- 大灯照明距离调节控制单元J446- 驻车距离报警控制单元J492- 全轮驱动控制单元T5v - 5 芯插头连接, 黑色T8ad - 8 芯插头连接, 黑色T8ag - 8 芯插头连接, 黑色, 左下 D 柱饰板之后T16h - 16 芯插头连接, 棕色T17f - 17 芯插头连接, 棕色, 左前座椅下方T26c - 26 芯插头连接, 黑色T47a - 47 芯插头连接, 黑色B383- 连接 1(驱动系统 CAN 总线,High ),在主导线束中 B390- 连接 1(驱动系统 CAN 总线,Low ),在主导线束中*- 仅用于 Multivan 、厢式车和客货两用车*2- 仅用于 Doppelkabine (双排座驾驶室货车)/ Pritsche (平板货车)Transporter电路图编号 4 / 5SG0-004051215J 519B708B709KJ 844G 24B383B383B390B3900.35or/vi**2T73b /54can-h 0.35or/br**2T73b /57can-l 0.35or/br**2T32/29can-l0.35or/vi**2T32/28can-h0.14or/vi*3*4T73b /54can-h T32/28can-h 0.14or/br *3*4T73b /57can-lT32/29can-l0.35or/sw T73b /19can-h 0.35or/br T73b/18can-l 0.35or/gn*T10ab 30.35or/br*T10ab 80.35or/vi*/90.35or/br*/100.35or/br *2T8o /80.35or/vi *2T8o /4ws =白色sw =黑色ro =红色rt =红色br =褐色gn =绿色bl =蓝色gr =灰色li =淡紫色vi =淡紫色ge =黄色or =橘黄色rs=粉红色行车记录仪, 车载电网控制单元, 远光灯辅助系统控制单元, 仪表板G24- 行车记录仪J519- 车载电网控制单元J844- 远光灯辅助系统控制单元K - 仪表板T8o - 8 芯插头连接, 白色T10ab - 10 芯插头连接, 白色, 接线站内,左侧 A 柱T32- 32 芯插头连接, 蓝色T73b - 73 芯插头连接, 白色B383- 连接 1(驱动系统 CAN 总线,High ),在主导线束中 B390 - 连接 1(驱动系统 CAN 总线,Low ),在主导线束中 B708 - 连接 1(仪表板高频 CAN 总线),在主导线束中 B709- 连接 1(仪表板低频 CAN 总线),在主导线束中*- 仅用于带有辅助远光灯的汽车*2- 仅用于带行驶记录器的汽车*3- 仅用于不带辅助远光灯的汽车*4- 仅用于不带行驶记录器的汽车Transporter电路图编号 4 / 6SG0-004061215J 519J 386B549J 387H 12F 350E 440B528**0.35gn/bl *2T73b /17lin0.5gr/ws *310.5gr/ws *3*4T73b/36lin T100.35vi/wsT12ae /9T5u /3lin0.14gn/bl *5*6T73b /36lin 0.35gr/ws *5*30.5gr/ws *5*3T73b /36lin 0.35gn/bl *4*7T73b /17lin T410.35gn/bl *4*2/100.5ws/gr *3*5/20.35gn/bl 0.5gn/blT16k /50.35gn/bl0.5gn/blT16l /5ws =白色sw =黑色ro =红色rt =红色br =褐色gn =绿色bl =蓝色gr =灰色li =淡紫色vi =淡紫色ge =黄色or =橘黄色rs =粉红色方向盘中的左侧多功能按钮, 卷簧, 警报喇叭, 驾驶员侧车门控制单元, 副驾驶员侧车门控制单元, 车载电网控制单元E440- 方向盘中的左侧多功能按钮F350- 卷簧, 方向盘内H12- 警报喇叭J386- 驾驶员侧车门控制单元J387- 副驾驶员侧车门控制单元J519- 车载电网控制单元T5u - 5 芯插头连接, 黑色T10- 10 芯插头连接, 黑色, 发动机舱电控箱内T12ae - 12 芯插头连接, 黄色T16k - 16 芯插头连接, 黑色T16l - 16 芯插头连接, 黑色T41- 41 芯插头连接, 灰色T73b - 73 芯插头连接, 白色B528- 连接 1(LIN 总线),在主导线束中 B549- 连接 2(LIN 总线),在主导线束中*- 见便捷系统所适用的电路图*2- 仅用于带电动车窗升降器的汽车*3- 用于配备防盗报警装置的汽车*4- 仅用于不带自动车距控制(ADR )的汽车*5- 仅用于带自动车距控制(ADR )的汽车*6- 仅用于不带防盗报警装置的汽车*7- 仅用于不带电动车窗升降器的汽车Transporter电路图编号 4 / 7SG0-004071215G 303*J 519G 384B577G 397W3G 305CD218J 3670.35vi/ge*0.35vi/ge *2*30.35vi/ge *20.35vi/ge *20.5vi/ge *2*T73b/24lin T10ab 0.5gn/ge *3T17k 10.5gn/ge *3T10ag /140.5gn/ge *3/80.35gn/ge *310.35gn/ge *340.35ge/gn *4T10g 1lin0.35ge/gn *4/10.35ge/gn *4T2du /10.35ge/gn *4T10j /100.35ge/gn *4/1T73b /37lin0.35vi/ge *53/7ws =白色sw =黑色ro =红色rt =红色br =褐色gn =绿色bl =蓝色gr =灰色li =淡紫色vi =淡紫色ge =黄色or =橘黄色rs =粉红色交流发电机, 车内监控发送/接收模块 1, 车内监控发送/接收模块 2, 汽车侧倾传感器, 雨水与光线识别传感器, 蓄电池监控控制单元, 车载电网控制单元C - 交流发电机G303- 车内监控发送/接收模块 1, 前部车内照明灯附近G305- 车内监控发送/接收模块 2, 后部顶篷模块上G384- 汽车侧倾传感器, 前部车内照明灯附近G397- 雨水与光线识别传感器J367- 蓄电池监控控制单元J519- 车载电网控制单元T2du - 2 芯插头连接, 黑色T10ab - 10 芯插头连接, 白色, 接线站内,左侧 A 柱T10ag - 10 芯插头连接, 棕色, 接线站内,左侧 A 柱T10g - 10 芯插头连接, 灰色, 发动机舱电控箱内T10j - 10 芯插头连接, 深棕, 发动机舱电控箱内T17k - 17 芯插头连接, 绿色, 接线站内,左侧 A 柱T73b - 73 芯插头连接, 白色B577- 连接(LIN-Bus ),在车顶导线束中 D218- 连接 1(LIN 总线),在发动机舱导线束中 W3- 连接,在后部导线束中*- 用于配备防盗报警装置的汽车*2- 仅用于带雨量传感器的汽车*3- 仅用于 Multivan 和 Shuttle *4- 仅用于带自动起停系统的汽车*5- 仅用于不带防盗报警装置的汽车Transporter电路图编号 4 / 8SG0-004081215J 519J 345J 810R J 794B406R 12B397J 6080.35or/br T12ac /80.35or/gn T12ac /70.35or/gnT10r 0.35or/br T10r 0.35or/br /9T32e /150.35or/gn/8T32e /160.35or/gn T8n /90.35or/br T8n /100.35or/gn T8n /90.35or/br T8n /100.35or/gn T12d /60.35or/br T12d /120.35or/br T23a /10.35or/gn T23a /40.35or/brT73b /21can-l0.35or/gn T73b/20can-h 0.35or/br T16u /20.35or/gn T16u /1ws =白色sw =黑色ro =红色rt =红色br =褐色gn =绿色bl =蓝色gr =灰色li =淡紫色vi =淡紫色ge =黄色or =橘黄色rs =粉红色挂车识别装置控制单元, 车载电网控制单元, 特种车辆控制单元, 电子通讯信息设备 1 控制单元, 驾驶员座椅调节控制单元, 收音机, 功率放大器J345- 挂车识别装置控制单元J519- 车载电网控制单元J608- 特种车辆控制单元J794- 电子通讯信息设备 1 控制单元J810- 驾驶员座椅调节控制单元R - 收音机R12- 功率放大器, 副驾驶员座椅下方T8n - 8 芯插头连接, 黑色, 收音机插口内T10r - 10 芯插头连接, 黑色, 驾驶员座椅下方T12ac - 12 芯插头连接, 红色T12d - 12 芯插头连接, 灰色T16u - 16 芯插头连接, 棕色, 副驾驶员座椅下方T23a - 23 芯插头连接, 绿色T32e - 32 芯插头连接, 灰色T73b - 73 芯插头连接, 白色B397- 连接 1(舒适/便捷系统 CAN 总线,High ),在主导线束中B406- 连接 1(舒适/便捷系统 CAN 总线,Low ),在主导线束中Transporter电路图编号 4 / 9SG0-004091215J 301J 255B406B406B397B397J 558J 731J 702J 364J 9380.35or/gn T20c /8T17a 0.35or/br T17a T20c /70.35or/br T20e /6T17a 0.35or/gn T20e /5T17a 0.35or/gn /30.35or/br /40.35or/br /130.35or/gn /120.35or/br T10aw /2T17j 0.35or/gn T17j T10aw /30.35or/gn /40.35or/gn T10bk 0.35or/br /30.35or/br T10bk 0.35or/br /10T10ax /20.35or/gn/9T10ax /30.35or/br T17p 0.35or/gn T17p 0.35or/gn T10af 0.35or/br T10af 0.35or/br T16g /2/50.35or/gn T16g /1/40.35or/gn T6au /5/30.35or/br T6au /3/20.5or/gn T10cf 0.5or/brT10cf 0.5or/br T26d /13/70.5or/gnT26d /12/6ws =白色sw =黑色ro =红色rt =红色br =褐色gn =绿色bl =蓝色gr =灰色li =淡紫色vi =淡紫色ge =黄色or =橘黄色rs =粉红色全自动空调控制单元, 空调器控制单元, 辅助加热装置控制单元, 左侧滑动车门控制单元, 车顶显示单元, 右侧滑动车门控制单元, 行李厢盖开启装置控制单元J255- 全自动空调控制单元J301- 空调器控制单元J364- 辅助加热装置控制单元J558- 左侧滑动车门控制单元J702- 车顶显示单元J731- 右侧滑动车门控制单元J938- 行李厢盖开启装置控制单元T6au - 6 芯插头连接, 黑色T10af - 10 芯插头连接, 蓝色, 接线站内,左侧 A 柱T10aw - 10 芯插头连接, 黑色T10ax - 10 芯插头连接, 黑色T10bk - 10 芯插头连接, 灰色, 右前座椅下方T10cf - 10 芯插头连接, 绿色, 右前座椅下方T16g - 16 芯插头连接, 黑色T17a - 17 芯插头连接, 黑色, 手套箱之后T17j - 17 芯插头连接, 白色, 左前座椅下方T17p - 17 芯插头连接, 红色, 左前座椅下方T20c - 20 芯插头连接, 黑色T20e - 20 芯插头连接, 黑色T26d - 26 芯插头连接, 黑色B397- 连接 1(舒适/便捷系统 CAN 总线,High ),在主导线束中B406- 连接 1(舒适/便捷系统 CAN 总线,Low ),在主导线束中。
基于SAE J1939的整车CAN网络数据侦听器何红芬;肖兵【摘要】目前普通的车载数据记录仪记录和存储的都是CAN数据帧,未能实现数据分析定位功能,会造成数据存储空间的浪费,具有较大的局限性.鉴于此,以双核单片机F28M35X为主控芯片设计整车数据侦听器,在其软件系统中集成SAE J1939协议,可对CAN数据帧进行解析定位,并将解析后的数据分类存储于SD卡中,有效利用了存储空间.各接口电路都采用了数字隔离设计,提高了数据侦听器的安全性和可靠性.通过实验可知,基于SAEJ1939协议的数据侦听器可有效实时侦听整车CAN 网络数据,并对数据进行消息定位,不会影响原网络的运行,提高了存储空间利用率,且安全可靠.【期刊名称】《自动化与仪表》【年(卷),期】2016(031)003【总页数】5页(P36-40)【关键词】数据侦听器;CAN;SAE J1939;信息定位【作者】何红芬;肖兵【作者单位】华南理工大学自动化科学与工程学院,广州510640;华南理工大学自动化科学与工程学院,广州510640【正文语种】中文【中图分类】TP274CAN总线是德国BOSCH公司为现代汽车应用领域推出的一种多主局域网。
它实现了汽车电子的网络化,大幅度减少了汽车内的线束,实现数据共享[1]。
汽车整车网络数据是分析汽车运行状态及故障原因的依据,对汽车设备开发和诊断等方面有着非常重要的意义。
为了实时记录整车网络的数据,车载数据记录仪等汽车电子设备随之发展。
目前普通的车载数据记录仪是以CAN数据帧的形式来采集和存储数据的,这样必然会造成存储空间的浪费,此外未能实现数据的分析定位功能和故障诊断功能,局限性较大,而高端的数据记录仪价格过于昂贵。
SAE J1939通信协议作为CAN的高层应用协议被广泛应用于工程车和商用客车中。
基于CAN网络的SAE J1939协议可以对数据进行准确的分析定位。
此外,数据记录仪的安全性和可靠性也是衡量产品好坏的标准。
CAN-FD总线协议及其车载⽹络应⽤简介CAN-FD通过改变帧结构和提⾼位速率等⽅法成功的把数据传输速率提⾼到了5Mbit/s。
诗讯半导体(Spansion)近期发布的Cortex-R5系列汽车级MCU产品全系列⽀持CAN-FD总线通信。
CAN及CAN-FD背景介绍⾃1986年博世(Bosch)⾸次在SAE国际⼤会上展⽰CAN(Controller Area Network,控制器域⽹络)通信⽅案以来,这种⾼速、可靠、易⽤的通信总线就⼀直被汽车产业所关注,并得到了绝⼤多数整车⼚和零部件⼚的⽀持。
经过了20多年的发展与沉淀,CAN通信⽬前已经成为车载⽹络领域最成熟、应⽤最⼴泛的通信总线之⼀(CAN的发展历程如图1所⽰)。
图1 CAN通信⽅案的发展历程CAN总线通信的⼀些关键特性使其⾮常适合车载⽹络应⽤:(1)差分信号可靠性⾼,抗⼲扰能⼒强,且通信介质选择灵活(双绞线、同轴电缆或光纤);(2)通信速率最⾼可达1 Mbit/s(此时距离最长40 m);(3)采⽤多主通信模式,当总线空闲时,任意节点均可以主动向⽹络其他节点发送信息;(4)⽀持节点优先级设定,并采⽤⾮破坏性逐位仲裁规则解决潜在数据发送冲突;(5)信息以⼴播式发送,所有节点都能接收到信息,保证⽹络内的数据⼀致性;(6)⽀持完善的错误界定和处理机制,出错节点具有⾃动关闭退出总线的功能。
随着⼈们对汽车的智能化要求越来越⾼,汽车上装配的电⼦控制单元也越来越多,CAN总线通信也渐渐显现出来⼀些不⾜:(1)最⾼数据传输速率限制为1 Mbit/s,车载领域实际使⽤速率最⾼为500 Kbit/s,⽆法满⾜越来越⾼的数据吞吐量需求;(2)每帧报⽂有效数据场为8字节,仅占整帧报⽂信息不⾜50%;(3)性能上难以应对Flexray、Ethernet等新型车载总线的威胁。
市场对提升CAN总线性能的强烈需求使CAN-FD (Flexible Data rate)应运⽽⽣,CAN-FD发扬了CAN的优点,并弥补了CAN的不⾜,其主要特性如下:(1)采⽤与CAN通信相同的事件触发模式,软件容易开发和移植;(2)最⾼数据传输速率达5Mbit/s,更好地满⾜要求⾼实时性、⾼数据传输速率的应⽤;(3)每帧报⽂有效数据场为64字节,占整帧报⽂信息超过70%;(4)相⽐Flexray、Ethernet等新兴总线成本更低。
《装备制造技术》2012年第8期随着汽车功能的增加与电子控制技术的普遍应用,汽车电气件越来越多,电线也会越来越多,汽车上的电路数量与用电量显著增加,线束也就变得越粗越重。
如何使大量线束在有限的汽车空间中,更有效合理地布置,使汽车线束发挥更大的功能,已成为汽车制造业面临的问题。
CAN总线技术的开发,对于汽车电子控制系统的应用无疑是一个突破,并将得到更大的发展。
1CAN总线概述CAN(ControllerAreaNetwork的缩写),即控制器局域网络。
CAN总线是由德国BOSCH公司于1986年进行开发,并随后通过国标ISO11898及ISO11519,如今已经成为国际上被最为广泛应用的工业现场总线之一。
尤其在欧洲和北美地区,CAN协议已经是汽车网络的标准协议,成为汽车计算机控制系统和控制局域网的标准总线。
在目前的汽车产业中,为了满足对于汽车安全性、便捷性、舒适度、低成本等多种要求,各种不同的电子控制系统不断被开发,并应用于汽车产业中。
但是由于这些电子系统之间通信时所需要的数据类型及要求有不同之处,所以,就要由很多条总线构成,并且不同的地方越多,电气件也越多,电线也就越多,线束也就变得越粗越重。
而与一般的总线相较,CAN总线在数据通信的应用中,拥有十分突出的实时性、可靠性和灵活性等优势,其性能良好、设计独特,与传统线束比较,多路传输装置大大减少了导线及联插件数目,使布线更为简易,因此,越来越受到人们的重视和青睐,并且被广泛应用在汽车领域。
因此,为了适应“减少线束的数量”等要求,先进的汽车就引入了CAN总线配置,采用多路传输系统。
如世界上著名的汽车制造商BMW(宝马)、BENZ(奔驰)、ROLLS-ROYCE(劳斯莱斯)等等都采用了CAN总线,作为控制总线,用来实现汽车内部的系统控制和检测执行机构之间的数据通信。
2智能汽车和智能汽车系统智能汽车具有自动驾驶的功能,并且集计算机、信息处理和控制、通讯和传感器等多种高端技术于一身。
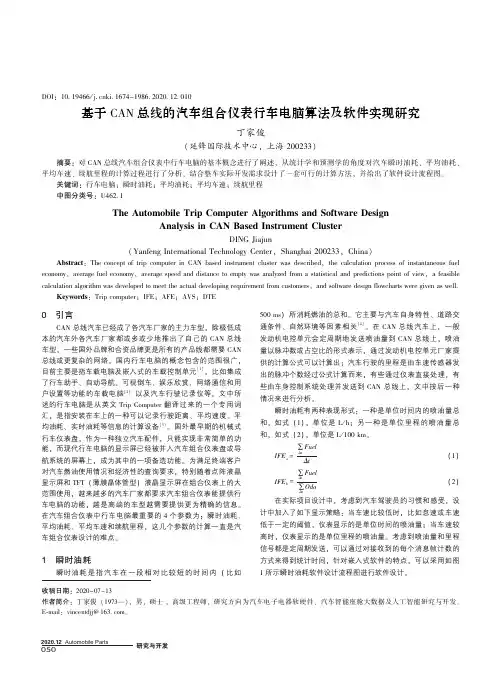
图1㊀瞬时油耗软件设计流程2 平均油耗平均油耗是指用户通过按键操作清零后开始的一段相对较长的时间内(比如一个月)汽车所消耗的燃油量,这是一个统计平均值,用这段时间所消耗的燃油与行驶的里程数的比值来表示㊂这里的平均油耗是实际油耗,除了和汽车自身特性㊁道路交通条件㊁自然环境相关外,还和驾驶员的驾驶习惯等因素相关[5]㊂按照概念,平均油耗的基本计算公式为:AFE cal =ðT _next _resetT _resetfuel _consumption ðT _next _resetT _resetOdo (3)如果用户两次按键清零之间累计的时间足够长,式(3)计算出来的结果完全可以用来衡量该汽车的燃油经济性,但它有个很明显的缺点:从公式中分母可知,如果累计里程非常小,特别是车还处于低速甚至是怠速停止的状况下,计算出来的AFE 将会非常大,那就会导致用户感觉耗油量巨大的错觉,从而怀疑整车的质量性能,在这种情况下必须引入理论油耗作为参考参数, 理论油耗 是指汽车厂商按照国家标准规定的温度㊁风向㊁风速等客观环境要求下,使汽车在平坦路面(机场路面)或在底盘测功机上保持一定车速等速行驶(一般有60㊁90,120km /h 3种选择),然后通过专业方法(一般有图2㊀平均油耗的软件设计流程图3㊀平均车速的软件设计流程续航里程续航里程是汽车油箱剩余油量可继续行驶里程,预测学的概念,需要根据以往燃油消耗量和已经行驶的里程来预测将来的平均油耗,从而和油箱剩余油量计算出可持续行驶其概念公式为:=Fuel_levelF_afe =Fuel level㊃Odo︿t+1Fuel︿t+1Fuel level为油箱剩余油量,一般通过油量传感器实时采由仪表直接处理或别的电控单元处理后发送到CAN Fuel︿t+1㊀t+1㊀为预测的油耗㊂图4㊀续航里程软件设计流程。
CAN总线一.概述CAN总线最初由德国Bosch公司为汽车检测、控制系统而设计的。
1993年CAN成为国际标准iso11898(高速应用)和iso1119(低速应用)。
CAN的规范从CAN1.2规范(标准格式)发展为兼容CAN1.2规范的CAN2.0规范(CAN2.0A为标准格式,CAN2.0B为扩展格式),目前应用的CAN器件大多符合CAN2.0规范。
CAN总线是一种串行数据通信协议,其通信接口集成了CAN协议的物理层和数据链路层功能,可完成对通信数据的成帧处理,包括为填充、数据块编码、循环冗余检验、优先级判别等工作。
二.CAN总线的特点2.1 目前汽车上的网络连接方式主要采用2条CAN线,一条是高速动力CAN,速率是500KB/S-1MB/S;另一条是车身的低速CAN,速率是100-250KB/S。
2.2 动力系统CAN主要连接对象是发动机控制器ECU、变速箱TCM、ABS控制器等等;车身系统CAN主要连接和控制汽车照明、灯光信号、空调、仪表、及其它辅助设备。
2.3 可以多主方式工作,网络上任意一个节点均可以在任意时刻主动地向网络上的其他节点发送信息,而不分主从,通信方式灵活。
2.4 网络上的节点(信息)可分为不同的优先级,可以满足不同的实时要求。
2.5 采用非破坏性位仲裁结构机制,当两个节点同时向网络上传送信息时,优先级低的节点主动停止数据发送,而优先级高的节点可不受影响地继续传输数据。
2.6 可以点对点、一点对多点(成组)及全局广播几种传送方式接收数据。
2.7 节点数实际可达110个。
2.8 采用短帧结构,每一帧的有效字节数为8个。
2.9 每帧信息都有CRC校验及其他检错措施,数据出错率极低。
2.10 通信介质可采用双绞线、同轴电缆和光导纤维,一般采用廉价的双绞线即可,无特殊要求。
2.11 节点在错误严重的情况下,具有自动关闭总线的功能,切断它与总线的联系,以使总线上的其他操作不受影响三.CAN总线的优点3.1 简化车身布线,提高电器可靠性。
大学生电子设计设计报告汽车行驶状态记录仪Vehicle travelling data recorder目录摘要 (1)一、方案论 (2)1.1系统微处理器的个数选择 (2)1.2存储显示微处理器作为主控制的选择 (2)二、系统设计 (3)2.1系统基本功能 (3)2.2系统性能指标 (3)2.3系统的提升部分 (3)2.4硬件设计 (4)2.5软件设计 (5)2.6特殊元件介绍 (17)三、测试说明 (18)3.1测试工具 (18)3.2霍尔元件功能测试 (18)3.3软件调试 (18)3.4测试数据 (18)3.5调试过程中遇见的问题分析以及解决方案 (20)3.6系统功能参数 (21)3.7创新与特点 (21)四、结束语 (22)五、附录 (22)汽车行驶状态记录仪Vehicle travelling data recorder摘要:本项目名称为“汽车行驶状态记录仪”,系统微处理器采用双单片机,关键部件有GPS模块、温度传感器和霍尔元件等,用于提取有效信息对汽车行驶位置进行精确定位,并获取轨迹、速度、温度等信息,然后进行存储,以供用户查询汽车一个星期的行驶路径(注:考虑成本问题,样机记录时间长度为6天;如果作为产品,可以记录1个月甚至一年以上,根据用户的要求而定)。
本设计采用数字化电路,软件采用C语言,有利于对数据进行准确分析,减少干扰。
系统电路采用模块化的设计思想,由5个模块组成,分别为GPS接收模块、数据处理分析模块、存储模块、键盘处理模块和显示模块。
其中显示模块可采用LCD显示,还可提供通过串口与PC通信,然后在电子地图上将汽车轨迹形象地显示出来。
关键字:单片机;GPS模块;温度传感器;霍尔元件;LCD;PC地图Abstract: With the theme of automobile electron, the 2008 GuangdongUniversities Students Electron Design Contest aims at perfecting function of the automobile by designing the electric circuits. And our design project is the automobile travel condition recording instrument. This system adopts the microprocessor (MCU) to analyze the GPS module,the temperature sensor and the Hall part position the automobile accurately,More over, it can gain and restore the data of temperature value and velocity for inquiry of the aut omobile’s week-long travelling route. Digital electric circuits are applied in all of this system, all the softwares are programmed in monolithic integrated circuit C language in order to analyze the data and orientate precisely, and reduce the disturbance (interference) and the error of the data due to the hardware electric circuit. There are five modules in the system circuit: GPS receive module, data processing analysis module, memory module, keyboard processing module and demonstration module. And demonstration module includes the LCD demonstration module and the PC electron map demonstration module in which the electronic map is connected with GPS through the serial port.Key words:MCU; GPS module; Temperature sensor; Hall part; LCD; PC map一、 方案论证1.1,系统微处理器的个数选择。
迷你型汽车多总线数据记录仪 blue PiraT Mini Data Logger
北京易安恒瑞科技有限公司 www.eantechnologies.com 目 录 1 blue PiraT Mini Data Logger 概述 ............................................................................................................. 1 1.1 解决问题的数据记录仪 .......................................................................................................... 1 1.2 概述.......................................................................................................................................... 2 1.3 支持的汽车总线系统/接口 ..................................................................................................... 2 1.4 可选型号 .................................................................................................................................. 2 1.5 典型的应用领域 ...................................................................................................................... 3 1.6 blue PiraT Mini的优势 ............................................................................................................ 4 1.7 典型技术参数 .......................................................................................................................... 5 1.8 一般技术数据 .......................................................................................................................... 6 2 blue Pirat Mini产品类型............................................................................................................................. 7 2.1 blue PiraT Mini数据记录仪 – 产品型号 “bP Mini CAN” ................................................... 7 2.2 blue PiraT Mini数据记录仪 – 产品型号 “bP Mini LIN” .................................................... 8 2.3 blue PiraT Mini数据记录仪 – 产品型号 “bP Mini MOST” ................................................ 9 2.4 blue PiraT数据记录仪 – 产品型号 “bP Mini FlexRay” .................................................... 10 3 blue PiraT mini硬件附件 .......................................................................................................................... 11 3.1 Romote Control Voice 远程控制语音遥控器....................................................................... 11 3.2 blue PiraT Mini适配器线缆 .................................................................................................. 13 3.3 blue PiraT mini支架 ............................................................................................................... 13 4 blue PiraT Mini软件许可证 ..................................................................................................................... 14 4.1复杂触发器Complex Trigger ................................................................................................ 14 4.3 远程控制监控器 Remote Control Monitor .......................................................................... 14 4.4 AutoSAR DLT数据记录 ....................................................................................................... 15 4.5 视频记录 Vedio Recording................................................................................................... 15 4.6 WiFi......................................................................................................................................... 15 4.7 Broad-R-Reach ........................................................................................................................ 16 4.8 MOST 150 Streaming ............................................................................................................. 16 4.9 CCP/XCP ................................................................................................................................ 16 5 blue PiraT主要客户 .................................................................................................................................. 16 1
1 blue PiraT Mini Data Logger 概述 1.1 解决问题的数据记录仪 21.2 概述 blue PiraT是专门用于汽车工业的数据记录仪,可用于监控并精确记录不同的总线系统和控制单元的数据。同步时间戳标记可以使得来自不同数据源的数据同步记录。记录的数据可以通过以太网或WiFi传输到笔记本电脑或PC上。通过使用启动条件设置、用户自定义的触发条件设置以及特定的时间范围的设置,可以灵活的有选择性的记录数据,只有需要的数据才被下载,并转化成不同的目标文件格式。所有的数据传输、配置、维护等功能都通过基于Window的软件 “TSL Client”实现。 blue PiraT Mini以“小盒子、大功能”为特点,为满足客户从低到高、从简单到复杂的不同应用需求提供多种配置和选择,是一款功能强大、专业性强、体积小巧、性价比高的数据记录仪。
1.3 支持的汽车总线系统/接口 8 x CAN 2 x LIN 4 x GB以太网 2 x BroadR-Reach Logging 5 x RS232(Rx/Tx) 2 x Analog-/ Digital IN 2 x Digital-OUT USB 2.0 Device/Host SD卡扩展接口
1.4 可选型号 bP Mini model Interfaces CAN LIN MOST FlexRay
„YOUR“
Config.
HS-CAN 8 2 2 4 ? LS-CAN 1 1 1 1 ? LIN 2 8 - 2 ? GBit Ethernet 4 4 4 4 ? Broad-R-Reach 2 - - - ? MOST - - MOST150 - ? FlexRay - - - 3 ? USB 2.0 Device/Host 1 1 1 1 ? Analog-/Digital IN 2 2 2 2 ? Digital OUT 2 2 - 2 ? Serial RS232 5 5 4 5 ?