大型水轮发电机组
- 格式:doc
- 大小:316.50 KB
- 文档页数:15
第一篇水力机械水轮机 + 发电机:水轮发电机组功能:发电水泵 + 电动机:水泵抽水机组功能:输水水泵 + 水轮机:抽水蓄能机组。
功能:抽水蓄能水轮发电机组:水轮机是将水能转变为旋转机械能,从而带动发电机发出电能的一种机械,是水电站动力设备之一。
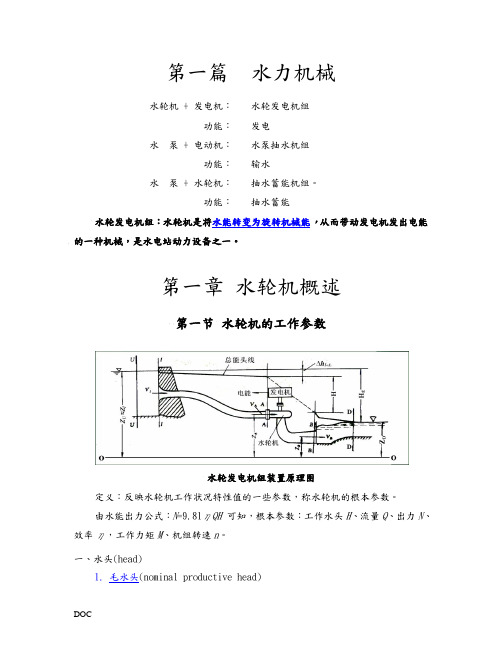
第一章水轮机概述第一节水轮机的工作参数水轮发电机组装置原理图定义:反映水轮机工作状况特性值的一些参数,称水轮机的根本参数。
由水能出力公式:N=9.81ηQH可知,根本参数:工作水头H、流量Q、出力N、效率η,工作力矩M、机组转速n。
一、水头(head)1. 毛水头(nominal productive head)H M =E U -E D =Z U -Z D2. 还击式水轮机的工作水头毛水头 - 水头损失=净水头H G =E A - E B =H M - h I -A3. 冲击式水轮机的水头H G =Z U - Z Z - h I-A其中Z U 和Z Z 分别为上游和水轮机喷嘴处的水位。
4.特征水头(characteristic head)表示水轮机的运行X 围和运行工况的几个典型水头。
最大工作水头: H max =Z 正-Z 下min -h I-A最小工作水头: H min =Z 死-Z 下max -h I-A设计水头(计算水头) H r :水轮机发额定出力时的最小水头。
平均水头: H av =Z 上av -Z 下av二、流量(m 3/s)(flow quantity)单位时间内通过水轮机的水量Q 。
Q 随H 、N 的变化:H 、N 一定时, Q 也一定;当H =H r 、N =N 额时,Q 为最大。
在H r 、n r 、N r 运行时,所需流量Q 最大,称为设计流量Q r三、出力与效率(output and efficiency)1. 出力(水轮机的输出功率)N :指水轮机轴传给发电机轴的功率。
水轮机的输入功率 (水流传给水轮机的能量)为:QH QH N w 81.9==γ 水轮机的输出功率:ηηQH N N w 81.9==2. 效率:η=N /N w ,一般η=80%~95%四、工作力矩和转速水轮机的出力可以用旋转机械运动公式来表达QH n M M N ηπϖ81.9602=== 式中M ——主轴力矩;ω——水轮机旋转角速度,n ——转速,n =3000/p ; p ——发电机磁极对。

浅谈水轮发电机组的轴线调整一、前言水轮发电机组轴线调整通常一般意义叫做盘车,是发电机组轴线调整质量的好与否,直接影响发电机组大修的质量,同时对发电机组的正常运行造成严重的影响,所以立轴式水轮发电机组轴线调整显得尤为重要。
二、立轴式水轮发电机组轴线盘车的应用条件1、弹性盘车必须在弹性油箱受力调整合格后进行,否则会造成盘车摆度假象。
为避免主轴倾斜弹性盘车应布置二部瓦。
因上导及下导距离较近(3.6米),顶落转子时,容易导致转动部件倾斜,故采用上导瓦和水导瓦(间距7.69米)间隙调整在0.03~0.05mm的方法,使转动部件处于强迫垂直状态。
2、检查各固定部件与转动部件的间隙,保证内部无杂物遗留。
发电机定转子间隙用白布带拉一圈。
水轮机转轮四周用塞尺检查。
三、立轴式水轮发电机组轴线盘车的应用过程1、固定部件同心度测量用球心器、内径千分尺、加长杆、钢琴线、重锤、油桶、透平油等测量固定部件同心度。
测量结果符合《水轮发电机组安装技术规范GB8564-2003》和ALSTOM相关标准。
2、上机架水平度测量调整(一)测量数据《水轮发电机组安装技术规范GB8564-2003》规定“对于不可调式无支柱螺钉支撑的弹性油箱推力轴承和多弹簧支撑结构的推力轴承的机架的水平偏差不应大于0.02mm/m。
(二)弹性油箱支撑件水平度测量调整推力瓦厚度测量调整,允许误差范围0.02~0.05mm。
推力瓦支柱高度测量调整,允许误差范围0.02~0.05mm。
推力瓦支柱相对高度测量(推力瓦装前),允许范围0.02~0.05mm。
镜板预装,测量镜板水平,允许误差范围0.02~0.05mm。
卡环厚度测量,允许误差范围0.02~0.05mm。
回装上导瓦架、上导瓦、水导瓦,上导推力充油至上导瓦架高度。
(三)转动部件推中心启动推力循环油泵和注油泵,将转动部件尽可能推至机组中心处位置,使空气间隙均匀。
在转动部件推中心过程中,因弹性油箱变形(详见弹性油箱结构图)导致在上导处推动转动部件时,转动部件未能整体移动,而是上导的推动量转换成弹性油箱的变形量。

立式水轮发电机组盘车数据分析与应用冯焕【摘要】本文运用最小二乘法推导了立式水轮发电机盘车摆度的理论计算公式,并探讨了数据偏差产生的原因.以某抽水蓄能电站4号机组大修盘车为例,分析了刚性盘车与弹性盘车的区别,提出了保证盘车数据准确性的要求,提出了应用新的相对摆度定义的盘车合格标准,应用公式计算最大摆度并进行评价,提出了一种简单可行的轴线调整措施并取得了实效.【期刊名称】《大电机技术》【年(卷),期】2019(000)005【总页数】6页(P42-47)【关键词】水轮发电机组;盘车;摆度;最小二乘法【作者】冯焕【作者单位】南方电网调峰调频发电有限公司检修试验分公司, 广州 511400;华南理工大学土木与交通学院, 广州 510641【正文语种】中文【中图分类】TM312大型水轮发电机组通常为立式结构,立式水轮发电机组的轴线是由发电机轴(或由上端轴、转子支架中心体及中间轴)和水轮机主轴等共同组成,轴线质量的优劣影响机组的安全稳定运行。
目前,在机组各段轴安装完成后,一般采用盘车方法测量机组轴线各部位的摆度及方位,分析轴线倾斜及偏折情况。
根据盘车时驱动机组旋转的动力不同,可划分为人工盘车、机械盘车和电动盘车等方法。
其中,人工盘车是应用最早、工法最简单、且普遍适用的一种方法。
对于设置弹性推力轴承的机组,则有刚性盘车和弹性盘车两种方式。
对于推力轴承为非弹性支撑结构的机组则不存在弹性盘车。
弹性盘车是指盘车过程中,推力轴承弹性油箱仍处于弹性状态,同时抱推力轴承上下两部导轴承,使大轴呈强迫垂直状态,且垂直测点设置在镜板上平面最大直径处,反映镜板轴向跳动值。
刚性盘车则指盘车过程中,通过采取相关措施使弹性油箱呈刚性,抱紧靠近推力轴承的导轴承,大轴为自然状态。
目前国内对机组盘车也有较多的应用研究。
参考文献[1]~[3]采用最小二乘法计算盘车数据,推导出摆度计算公式,并在金安桥、回龙水电站机组盘车中应用。
文献[4]介绍机组轴线调整中的计算及处理方法。

立式水轮发电机组盘车工艺的研究刘昊摘要:本文通过对立式水轮发电机组的四种盘车工艺进行分析,对电气盘车工艺和自动盘车工艺进行了比较,肯定了自动盘车的使用优点,并对自动盘车装置的使用和改进提出了一些建议。
关键词:立式水轮发电机组;轴线;自动盘车装置0 前言立式水轮发电机组轴线测量和调整是机组安装和检修中的重要步骤之一,轴线调整质量的优劣将会直接影响机组的安全稳定运行。
而水轮发电机组轴线的测量都是通过对机组进行盘车来进行的。
目前立式水轮发电机组一般有四种盘车工艺,即人工盘车、机械盘车、电气盘车、自动盘车。
1 人工盘车适用于小型立式水轮发电机组,一般用圆盘式盘车工具固定在发电机推力头上,在圆盘上装设推杆,在统一号令指挥下由人工推动推杆对机组进行盘车。
该盘车方式需要的人员多、劳动强度大、工作效率低、工作现场复杂,存在一定的安全隐患,而且测量数据精度和转速受人为因素影响较大。
2 机械盘车适用于中、小型立式水轮发电机组,采用机械式盘车方式,就是利用机械牵引带动机组旋转的盘车方式,一般采用厂房内安装的行车为牵引动力,用滑轮组作钢丝绳导向带动机组旋转测量机组轴线。
机械盘车由于操作简单,不需再购置其他设备,所以在中、小型电站中使用广泛。
其缺点是在使用过程中无法有效监测钢丝绳和导向地铆的荷载变化情况,如机组在盘车过程中发生主轴“憋劲”现象时,将导致钢丝绳损坏和导向地铆拉脱的事故发生,危及人身和设备的安全;另外,在操作中难以自如控制机组的旋转,停点不准确,不能真实反映机组轴线状态。
3 电气盘车3.1 电气盘车方式介绍电气盘车方式是目前大、中型立式水轮发电机组应用最广泛的一种盘车工艺,当水轮发电机采取电气盘车时,同步发电机是处在步进电动机状态。
原理是电气盘车时发电机的转子通入直流电励磁,定子三相也以一定的顺序轮流通入直流电。
则该相定子就会受到顺时针(或反时针)的磁力,根据作用力与反作用力原理,转子就会受到反时针(或顺时针)的磁力。
浅谈JC水电站大型轴流转桨式水轮发电机组蜗壳衬板安装方法作者:张森来源:《科学与技术》2018年第25期摘要:根据JC水电站蜗壳现场安装中的关键工艺和控制重点,整理、总结出轴流转桨式水轮发电机组蜗壳衬板安装调整质量控制要求和安装经验。
关键词:大型轴流转桨式;蜗壳;衬板;拼装;焊接;JC水电站1.工程概况JC水电站位于高海拔地区,共装设3台轴流转浆式机组,总装机容量360MW。
由于JC 水电站采用河床式地面发电厂房,蜗壳衬板安装具有以下的特点:①蜗壳衬板只能采用大坝缆机进行分块吊装,吊装和协调难度大。
②蜗壳衬板安装全部为露天施工,因外形尺寸大,防风防雨难度大。
③蜗壳焊缝探伤采用MT检测。
④蜗壳衬板安装与土建混凝土浇筑交叉进行,对工程进度影响大。
⑤蜗壳外侧衬板与边墙距离较远,加固难度大。
本电站蜗壳为不对称T形断面蜗壳,包角215°,蜗壳进口采用单中墩,蜗壳进口平面最大净宽度为19.895m(含一个宽度均为3.5m的中墩)。
所有中墩的尾部均有金属护板,高度方向全衬,Q235C钢板里衬厚度为于18mm,单台机组蜗壳钢衬总重量约210.2t。
2.蜗壳衬板安装蜗壳衬板分为底衬板、外侧衬板、顶衬板,安装时与土建二期混凝土浇筑交叉进行。
部分高程钢筋网绑扎完成后,利用25t缆机将该高程段衬板吊入机坑进行调整加固,焊接完成后进行衬板位置、高程复测,加固情况检查,合格后进行该高程混凝土浇筑,按照此方式进行逐层安装。
2.1衬板安装顺序:根据土建施工进度先进行底衬安装,再进行侧衬安装,待转轮室、座环安装完成后进行底衬圆弧段安装,蜗壳内承重脚手架搭设完成后进行顶衬安装。
2.2底衬安装:底衬安装从下到上:水平段-曲面段-圆锥段-圆弧段。
底衬板安装在土建钢筋网绑扎完成后进行,现场在适当位置测放出4个轴线点与2个高程点,检查钢筋网上平面与竖立筋高程,不得高于衬板底部锚杆。
安装前对已标记的轴线点进行复测,无误后按照设计图纸进行底部支撑槽钢安装。

激光跟踪仪在大尺寸水轮发电机组安装测量中的应用摘要:近些年来大型水轮发电机组的安装工艺有了长足的发展,其安装质量、安装成本、精度等要求也越来越高,传统的施工测量方法费工、费时,其测量精度严重依赖测量人员的技术水平。
对此,引入激光跟踪仪进行了水轮机组安装测量工作的研究与实验,通过实际应用积累了一些技术经验和一定的技术成果,本文重点介绍了激光跟踪仪在水电项目实例中的测量技术与具体应用。
关键词:传统方法;激光跟踪仪;大尺寸水轮发电机组;安装测量;1引言为了突破大尺寸水轮发电机组安装施工测量落后的技术瓶颈,寻找更优的测量技术和手段,探索引入高精度激光跟踪仪测量系统,它集合了激光干涉测距技术、光电探测技术、现代数值计算理论等各种先进技术,对空间运动目标进行跟踪并实时测量目标的空间三维坐标。
具有高精度、高效率、实时跟踪测量、安装快捷、操作简便等特点,适合于大尺寸工件配装测量[3]~[5]。
2传统测量技术与方法传统施工测量工作所使用的测量仪器设备及工器具包括测圆架、水准仪、重锤线、求心器、水平仪、内径或外径千分尺、百分表、游标卡尺、塞尺等,为了保证安装精度,还会用到一些特制的安装模具、刀口尺等,传统测量方法广泛采用电测法。
经过计算可得到机组部件的圆度、平整度、同心度、同轴度、垂直度、扭斜等各项安装指标参数[1][2]。
其工作过程的实质是积木式的测量方法,逐次使用多种仪器设备及工器具,然后才能得到所需的测量结果。
在这样的测量过程中,测量基准的每次传递都会引入测量误差,从而导致测量精度和可靠性降低。
3激光跟踪仪测量技术3.1 激光跟踪仪测量系统Leica激光跟踪仪AT402的有效测程1.5米~80米(配合1.5"靶球,可测距离大于160米),最大允许测量误差(MPE)达到。
AT402绝对激光跟踪仪是一台适用于工业测量的便携式测量机,仪器内置的测距仪具有绝对激光测距(ADM)功能,其距离测量载波为经过调制和偏振处理后的红外光束。
文章编号:055929342(2002)0620026202水轮发电机组盘车工艺杨 大 贵(葛洲坝水力发电厂,湖北宜昌 443002)关键词:水轮发电机组;机械盘车;电动盘车;旋转力矩;空气间隙;葛洲坝水电厂摘 要:大型水轮发电机组在检修时一般采用机械和电动两种盘车方式。
机械盘车较简便,通常在定、转子回路断开后采用;电动盘车转速易控制,受力均匀,可控性高,一般在测量及调整机组轴线及研磨乌金轴瓦时采用。
这两种盘车方式都应具备一定的条件,采取合适的工艺,并严格操作时的注意事项。
中图分类号:TK73013(263) 文献标识码:B大型发电机组在检修中,经常需要缓慢转动整个机组转动部分即盘车。
葛洲坝水电厂机组盘车一般采用机械和电动两种方法。
其中机械盘车是用桥机做牵引,通过钢丝绳和滑轮来拖动机组。
机械盘车比较简便,通常在定、转子回路断开后采用。
电动盘车是使发电机定、转子分别通上直流电后,利用定、转子磁场的交叉作用力,使机组缓慢旋转。
电动盘车时转速容易控制且受力比较均匀,对机组轴向影响也较小,机组转动位移的可控性远远高于机械盘车方式。
因此,测量及调整机组的轴线以及研磨乌金轴瓦等,一般采用电动方式进行盘车。
1 盘车条件盘车前需要根据不同的盘车目的,选择盘车方式,然后制定出方案供操作时执行。
无论那种盘车,水轮发电机组应具备下列条件。
(1)尽量调整推力轴承瓦的受力,使全部瓦面受力基本均匀,并使镜板处于水平状态。
上导和水导至少分别保证有4块瓦与滑动轴之间的间隙为0105 mm,借以控制主轴径向位移,从而保证整个水轮机上下轴心一致,使盘车更轻松。
(2)认真检查各固定与转动部位的间隙,应该保证内部无杂物遗留。
发电机定转子间隙用白布带拉一圈。
水轮机叶轮四周用塞尺检查一遍。
做到镜板和各瓦面洁净并已具备润滑条件。
(3)其他相关工作结束。
风闸落下,机坑漏油泵投入。
研磨钨金瓦时瓦面抹羊油或其他高抗磨润滑剂如“倍力”等;并在风闸落下后,在尽可能短的时间内开始盘车。
大型水轮发电机组 电气09-1 周洪凯 0903010122 大型水轮发电机组调速及稳定性分析 摘 要:为提高水轮机调速系统的控制品质,根据自抗扰控制(ADRC)原理,针对考虑弹性水击效应的水轮发电机组水门调节的非线性模型,对ADRC的设计进行了改进。基于三相短路故障、负荷扰动和参数变化的数字仿真实验显示,改进的ADRC与微分几何方法的控制性能相当。结果表明扩张状态观测器的扰动观测和补偿作用使得ADRC对模型的不确定因素和各种扰动具有更强的适应性和鲁棒性。 Abstract: An improved auto disturbance rejection control (ADRC)controller was designed to control a hydroturbine generator set usingthe elastic water hammer nonlinear model. Numerical simulations of a three-phase short circuit fault, load disturbances and parameter perturbations demonstrated that the performance of the improved ADRC is similar to that of the nonlinear differential geometry control method. ADRC is more adaptable and robust against model uncertainties and disturbances because ESO compensates for all sorts of real-time disturbances.
正文:水轮机水门调节系统是一个水、机、电的综合控制系统。由于水流惯性带来的水锤效应,水、机、电各环节的非线性和大惯性,参数随工况改变的变化,以 及电网负荷变化带来的扰动,使得水轮发电机组的调节十分困难。常规的PID制,针对系统在某一平衡点附近的近似线性化模型设计,无法适应系统运行点的改变,因而难以保证系统在强扰动下的稳定性。近年来,人们已开始尝试将一些先进的控制策略,如变参数的PID[1,2]、模糊控制[3]、神经网络[4]、H∞控制[5]、微分几何方法[6]等,应用于水轮发电机组的调节,为提高其控制品质进行了有益的探索。文[7]提出一种自抗扰控制(ADRC)策略,其控制器的设计不依赖于被控对象模型,算法简单,参数适应范围广,能自动检测并补偿对象的“内扰(模型)”和“外扰”作用,在未知强非线性和不确定强扰动作用下都能保证很高的控制精度。由于ADRC适合于解决水轮机调节的难点,因此本文尝试将ADRC应用于水轮电机组的调速系统,以期提高水轮机调速系统的控制品质,并探索ADRC的工程实用设计方法,进一步改善其控制效果。
1 水轮发电机组调速系统模型 水轮发电机组调速系统结构如图1所示[8]。其中:μ和μ0分别为水门开度和初始开度,Pm为机械功率。接力器部分以一阶惯性环节表示为 Gj(s) =11 +Tss, (1) 其中Ts为接力器缓冲时间常数。水轮机及引水系统可用传递函数表示为 Gt(s) =Pm(s)μ(s)=eμ+ (eqμeh-eqheμ)Gh(s)1 -eqhGh(s), (2) 其中:eμ,eqμ,eh,eqh分别为水轮机传递系数,通常取理想值:eμ=1.0,eq=1.0,eh=1.5,eqh=0.5。 考虑弹性水击效应时,压力引水系统的动态特性可用双曲正切函数表示为 Gh(s) =- 2TwTrtanhTrs2, (3) 其中:Tw为水流惯性时间常数,Tr为管道反射时间常数。则水轮机弹性水击模为 Gt(s)=Pm(s)μ(s)=1-2TwTrtanhTr2s1+TwTrtanhTr2s, (4) 其中tanhTr2s=1-e-Trs1+e-Trs。式(4)等价于 Gt(s) =(Tr- 2Tw) + (Tr+ 2Tw)e-Trs(Tr+Tw) + (Tr-Tw)e-Trs. (5) 因此,在数值仿真中可采用式(5)所示的环节来等效 实现水轮机弹性水击模型。当引水系统较短时,可用 刚性水击模型来描述水轮机的动态特性 Gt(s) =Pm(s)μ(s)=1 -Tws1 + 0.5Tws. (6) 水轮发电机与系统的联系由单机无穷大系统来 近似,用二阶发电机模型[6]描述如下: δ。= (ω- 1)ω0, ω。=1H(Pm-D(ω- 1) -Pe(δ,E′q)).(7) Pe(δ,E′q) =E′qVsx′dΣsinδ+V2sx′dΣ-xqΣx′dΣxqΣsin 2δ. (8) 其中:δ为发电机转子运行角,Pe为输出电功率, Vs为系统电压,x′dΣ=x′d+xt+0.5xl,xqΣ=xq+ xt+0.5xl,x′d,xq分别为发电机d轴暂态电抗和q 轴同步电抗,xt,xl分别为变压器短路电抗和输电 线路电抗。式(7)和(8)中假设机组已采用优良的励 磁控制器,动态过程中保持q轴暂态电势E′q恒定。 2 自抗扰控制器设计 自抗扰控制器(ADRC)由跟踪微分器(TD)、扩 张状态观测器(ESO)、扰动补偿及误差反馈等非线 性环节组成,具体原理及结构见文[7]。 考虑刚性水击效应的水轮发电机组非线性模型 由式(1), (6)和(7)构成,对应增量式微分方程组为 Δδ。=ω0Δω, Δω。=1H(ΔPm-DΔω-ΔPe), ΔP。m=2Tw[-ΔPm+Δμ-TwΔμ。], Δμ。=1Ts(-Δμ+u). (9) 可见,水轮发电机组是一个典型的非最小相位对象, 它在右半复平面的零点使得系统在暂态响应的起始 段发生反调,若不通过控制器及时加以克服,则系统 的动态性能恶化,调节时间加长。 若忽略引水系统的非最小相位特性,控制器按 标准的4阶ADRC设计,取发电机转子运行角δ为 被控量, ESO的输出zi(i=0,„,3)分别跟踪δ,δ。, δ。,δ„,则控制律为 u=u0-z4/b0= [γ0g0(δ0-z0) + γ1g1(δ。0-z1) +γ2g2(δ。0-z2) + γ3g3(δ…0-z3)] -z4/b0. (10) 其中,z4跟踪内外扰实时作用总和a(t)=δ(4)-b0u =f(δ,δ。,δ。,δ„,w(t))+(b-b0)u-b1u。。可见,对象 的非最小相位特性是通过ESO观测并加以补偿的, 排除其观测误差不论,由于ESO实际由若干积分环 节构成,对其输入信号有积分延迟作用,因而控制律 (10)不能及时响应系统在暂态起始段的反调效应。仿真实验证实了这一点,在强动(如三相短路故障)下,系统虽然最终也能恢复稳态,但暂态过程振荡次数多、幅度大、时间长。因此针对非最小相位对象,需要对ADRC的设计进行改进。取新的被控量为y=Δω+2H∫t0Δμdt,则水轮发电机组刚性水击模型(9)可通过变量重组变换为 ADRC所适用的标准形式 x1=x2 y。=1H(ΔPm-DΔω-ΔPe) +2HΔμ, x2=x3 y。=-2TwH+DH2ΔPm+D2H2Δω+2TwHΔμ+DH2ΔPe-1HΔPe。, x3=f(x1,x2,x3,w(t)) +bu y„=f(y,y。,y。,w(t)) +bu.(11) y=x1=Δω+2H∫t0Δμdt. (12) 根据式(11),控制器按3阶ADRC设计,结构如图2所示。对于恒值控制系统,可省去TD。由于Δω,Δμ和ΔPe均可测,反馈的状态变量x1,x2和x3可按式(11)直接
重构,避免经ESO观测带来的延迟和误差。此时, ESO的输出z通过被控量y和控制量u跟踪对象内、外扰的实时作用总和a(t)=y„-b0u=f(y,y。,y。,w(t))+(b-b0)u,并进行补偿。控制器的其余部分按常规的ADRC设计。
近来,几个电站的大型机组陆续出现了一些振动稳定性问题,这些振动稳定性问题表现出许多共同的特征,而且,这些特征大多是过去一般大、中型机组中所少见的。现有标准缺少大型、巨型机组的经验和数据。大量现场试验结果表明,水电机组的振动稳定性水平和机组的尺寸有明显的相关性。因此,从振动稳定性的角度,是以水轮机转轮的名义直径D,的尺寸来划分中型、大型和巨型机组的: 中型Zm镇Dl大型sm《Dl巨型D;)sm。 当仅考虑非共振情况时,振动和机组尺寸的关系,实质上就是刚度、动载荷两者和机组尺寸的关系。压力脉动只是动载荷的一种来源,并不是动载荷本身。
1刚度和尺寸的关系 根据机组主要支持部件(发电机上、下机架、水轮机顶盖)的主要应力成分和相应的挠度计算公式,可以定性地分析部件刚度以发电机的负荷机架为例加以说明和其尺寸间的关系。下面以发电机的负荷机架为例加以说明。发电机的负荷机架,其单个支臂内端的弯曲应力计算公式为
对机组其他部件的分析结果相同。目前在结构设计时,主要考虑强度。因此,在保持应力水平相当时,部件刚度必然随机组尺寸的增大而降低。由式还可以看出,对于非共振情况,在同样的振动载荷下,随机组尺寸的增大和刚度的降低,部件的振动幅值将相应的增大。 2动载荷和机组尺寸的关系 2.1流动完全相似的惰况 在水力条件完全相似的条件下,单位面积的动载荷相等,则总动载荷和部件受力面积成比例,和线性尺寸的平方成比例。对水头相等、几何尺寸相似的2台水轮机,例如D,一sm的机组,其总动载荷为D,~4m机组的4倍,为D;一5.sm机组的2倍。 2.2流动不完全相似的情况 实际上,尺寸不同的相似水轮机,其水力条件并不完全相似。例如,当水轮机尺寸增大后,叶栅密度虽然没变,但叶栅间距却增大了。由此引起的后果是:叶道中水流的流速和压力分布不均匀性增加,使叶频压力脉动增大;叶道中的流动分离、涡流等不稳定流动情况增强;低负荷时,叶片进口水流的冲击、脱流以及由此引起的随机性压力脉动增大;由于流量的增大与惯性力有关的涡带压力脉动幅值非线性增加等等。这些是大型和巨型机组的振动往往比中小型机组大的原因。 2.3水体共振惰况 水体共振产生的强烈的压力脉动,对水轮机是一种特别强大的激振力,是水轮机运行中特别危险的情况。激发水体共振的激发力,都是水轮机中原有的压力脉动,它们的频率一般都很低。大型和巨型水轮机的流道尺寸大,水体固有频率相对较低,这正它们易于被激发而产生水体共振的原因。岩滩、五强溪、隔河岩等电站的实例都证实了这一点。
3部件动力响应和机组尺寸的关系 3.1结构部件的动力响应 大型和巨型机组的振动部件或由部件组成的动系统,由于尺寸较大,固有频率相对较低,更接近于水轮机压力脉动的频率,易被激发产生共振。水体的动力响应水轮机流道中的水体既是动载荷的载体,本身又是振动体,它也有动力响应的问题。由于水体自身的阻尼很小,一旦发生共振,其放大系数将非常大,所激起的压力脉动幅值可以达到惊人的水平。例如,引水管路的水体共振时,其振幅可高达水头的50%~70%;尾水管涡带压力脉动,在能量工况下,其相对幅值仅约3肠~8写,而在共振情况下可高达40%以上;卡门涡压力脉动幅值本身是微不足道的,但它激起的水体共振相对幅值则可达60肠以上。