合成孔径雷达SAR的点目标仿真成像
- 格式:doc
- 大小:250.00 KB
- 文档页数:8
合成孔径雷达sar孔径合成原理合成孔径雷达(Synthetic Aperture Radar,简称SAR)是一种利用雷达原理进行成像的技术。
它通过利用雷达的回波信号进行数据处理,实现高分辨率、大覆盖面积的地面成像。
而SAR的核心技术之一就是孔径合成原理。
孔径合成原理是利用雷达的运动产生的多个回波信号进行合成,从而得到高分辨率的成像。
与传统雷达不同,SAR的发射器和接收器不是静止不动的,而是在飞机、卫星等平台上运动。
正是因为这种运动,SAR能够利用多个回波信号进行合成,达到提高分辨率的效果。
SAR的孔径合成原理可以通过以下几个步骤来解释:1. 发射信号:SAR首先向地面发射一束射频信号。
这个信号在空中传播并与地面物体相互作用后,会产生回波信号。
2. 接收信号:接下来,SAR接收器会接收到地面反射回来的回波信号。
这些信号包含了地面物体的散射特性,可以提供有关地面物体的信息。
3. 信号处理:接收到回波信号后,SAR会对这些信号进行处理。
首先,对回波信号进行时域压缩处理,以减小信号的时延。
然后,对压缩后的信号进行频域处理,通过傅里叶变换等算法,将信号转换为频域数据。
4. 孔径合成:在信号处理的过程中,SAR会利用雷达平台的运动信息,将多个回波信号进行合成。
SAR的雷达平台在运动过程中,相当于一个虚拟的大孔径天线,可以接收到多个不同位置的回波信号。
通过对这些信号进行合成处理,可以得到高分辨率的成像结果。
5. 成像显示:最后,SAR将合成后的信号进行成像显示。
利用合成的回波信号,SAR可以得到高分辨率、清晰度高的地面图像。
这些图像可以用于地质勘探、军事目标识别、环境监测等领域。
需要注意的是,SAR的孔径合成原理要求雷达平台在运动过程中保持稳定,并且要有较高的精度。
这样才能保证合成后的图像质量。
此外,SAR的孔径合成原理也要求对回波信号进行准确的处理和合成算法。
只有在合适的处理和算法下,才能获得理想的成像结果。
SAR雷达成像算法的研究摘要合成孔径雷达(SAR)是一种置于运动平台(如飞机和卫星等)的成像雷达,具有全天时、全天候、远距离成像的特点,因此可以大大提高雷达的信息获取能力,近年来在军事和民用方面都得到了广泛的发展和应用。
机载合成孔径雷达成像仿真技术在机载SAR 的研究与发展中具有重要作用。
本文首先介绍了二维SAR成像的基本原理,分析了二维SAR距离和方位向上的分辨率以及距离徙动特性,从脉压理论和合成孔径原理出发,分析了SAR高分辨率成像的距离高分辨率和方位高分辨率理论,说明距离分辨率取决于信号带宽,方位分辨率则取决于载机与固定目标相对运动时产生的具有线性调频性质的多普勒信号带宽决定,并通过脉压技术实现方位高分辨成像。
然后介绍了两种成熟的合成孔径雷达成像算法:距离-多普勒算法、线频调变标算法,并在Matlab环境里进行仿真实现。
最后应用距离-多普勒算法完成了机载正侧视合成孔径雷达对地面固定目标模型的成像仿真实验,得到了比较理想的仿真图像。
关键词:合成孔径雷达,距离-多普勒算法,线频调变标算法Research of Imaging Algorithm for SARAbstractSynthetic aperture radar(SAR)is placed in moving platform such as airplane and satellite, and can obtain image reflecting dispersion characteristic of the objects.Because SAR is free of weather influence, and works in both day and night, and it can g reatly improve radar’s capability of gaining information, it is widely applicated and well developed in both civilian and military fields in recent years. Imaging simulation technology plays an important role in the research and development of airborne SAR.This thesis discusses the fundamental theory of planar SAR, analyzes planar SAR resolving ability in range and azimuth dimensions and the characteristic of Range Cell Migration(RCM). According to pulse compression theory and SAR principle, the paper firstly gives an analysis on the principle of high-resolution SAR imaging, then, notes that the SAR range resolution is dependent of signal bandwidth, while SAR azimuth resolution is dependent of the bandwidth of the LFM-featured Doppler signal generated from the relative movement between aircraft carrying the radar and the fixed ground target, thus, high azimuth resolution can be realized through pulse compression. This thesis also introduces two kinds of mature SAR imaging method, Range-Doppler algorithm and Chirp-Scaling algorithm, which have been simulated and realized under Matlab environment. Finally, the imaging simulation test of airborne sideway SAR to the fixed target on the ground is carried out by using the Range-Doppler algorithm, accordingly the ideal simulating images have been obtained.KEY WORDS:Synthetic Aperture Radar, Range-Doppler algorithm, Chirp-Scaling algorithm目录摘要 (I)Abstract (II)1 绪论 (1)1. 1 研究背景和意义 (1)1. 2 SAR研究概况 (1)合成孔径雷达分类 (2)合成孔径雷达应用 (3)本文研究内容 (3)2 SAR成像与高分辨率基本原理 (4)引言 (4)2.2 二维SAR成像基本原理 (4)2.2.1 二维SAR原始数据的录取 (4)2.2.2 距离徙动 (6)2.3 线性调频信号和脉冲压缩原理 (9)2.3.1 线性调频信号 (9)脉冲压缩原理 (10)2.4 雷达分辨率 (12)实孔径侧视雷达成像及成像空间分辨率 (12)实孔径侧视雷达成像 (12)2.4.1.2 实孔径侧视雷达空间分辨率 (13)2.4.2 SAR 空间分辨率 (14)2.4.2.1 距离向分辨率 (14)2.4.2.2 方位向分辨率 (16)2.5 本章小结 (19)3 SAR 仿真成像 (20)3.1 引言 (20)3.2 合成孔径雷达成像算法 (20)3.2.1 距离—多普勒成像算法 (20)3.2.2 线频调变标(Chirp—Scaling)成像算法 (26)3.3 本章小结 (29)4总结与展望 (30)致谢 (31)参考文献 (32)附录 (34)1 绪论1. 1 研究背景和意义雷达成像是现代探测科学领域的一项突破性成就。

合成孔径雷达成像技术研究合成孔径雷达(Synthetic Aperture Radar,简称SAR)是一种利用雷达回波信号进行图像合成成像的技术。
SAR技术具有高分辨率、天气不受影响、全天候观测等优势,在军事、民用等领域都有广泛的应用。
本文将就合成孔径雷达成像技术进行探讨。
一、SAR成像原理SAR利用雷达波束在空中制造一条虚拟的天线,利用航空器飞行时的运动来合成长达几十公里的天线,从而得到高分辨率的雷达图像。
SAR成像主要分为以下几个步骤:1. 采集雷达数据:雷达波束向地面发射信号,当信号遇到物体时会被反射回来,而反射回来的信号中包含了物体的反射特性信息。
雷达接收到这些信号后会将它们记录下来。
2. 数据预处理:由于遥感数据与地面的距离非常远,因此在采集到的数据中可能会包含许多噪声和杂波。
因此,需要对采集到的数据进行预处理,去除噪声和杂波。
3. 信号成像:信号成像是SAR技术的核心环节。
在这个步骤中,SAR利用长达数公里的航向移动,在飞机飞行方向上合成一个极长的虚拟天线,然后将记录下来的雷达数据根据相位信息进行归位处理,最终得到高分辨率的雷达图像。
4. 图像处理:在得到雷达图像后,需要进行图像处理,去除干扰和噪声,增强图像的对比度和清晰度。
二、SAR成像技术的进展随着技术的进步,SAR雷达在成像效果和应用领域上都有了巨大的发展。
当前,SAR成像技术的主要进展包括以下几个方面:1. 多波段SAR技术:多波段SAR技术是指利用多个频段的雷达波进行成像,从而提高图像的分辨率和清晰度。
2. 交替极化SAR技术:交替极化SAR技术是在不同的期间使用不同的极化方式进行成像,从而改善反射信号和噪声之间的区分度,从而获得更准确的图像信息。
3. 全极化SAR技术:全极化SAR技术是在同一时期内使用多个极化方式进行成像,获得多种极化角度下的地物反射信息,从而探测地物的物理性质。
4. 飞行器编队SAR技术:飞行器编队SAR技术是利用多个SAR传感器进行监测,进行多传感器数据融合,从而提高数据的质量和分析能力。
SAR成像与成像算法SAR 成像1 合成孔径雷达(SAR )1.1 SAR 简介合成孔径雷达(SAR)是⼀种可以全天候、全天时⼯作的⾼分辨率成像雷达。
它利⽤天线和⽬标之间相对运动⽽形成等效合成孔径,解决了雷达设计中⾼分辨率与⼤尺⼨天线和短⼯作波长之间的⽭盾,在遥感和国防中潜在着极⼤的应⽤价值。
星载SAR ⼀般⼯作在正侧视状态,但在特殊应⽤中,也会⼯作在斜视状态。
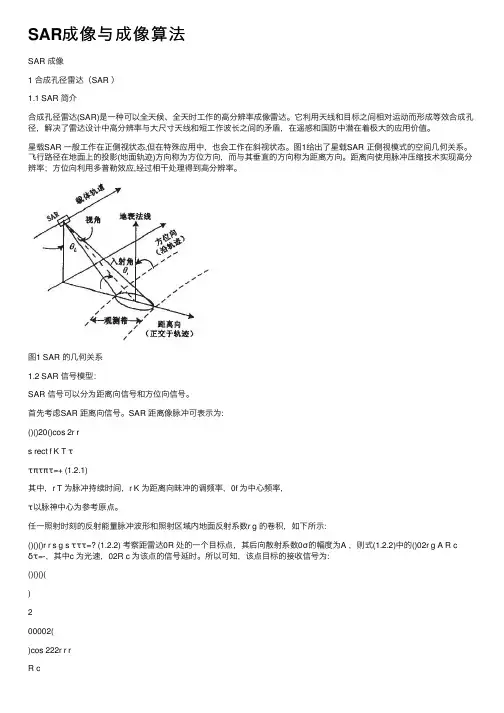
图1给出了星载SAR 正侧视模式的空间⼏何关系。
飞⾏路径在地⾯上的投影(地⾯轨迹)⽅向称为⽅位⽅向,⽽与其垂直的⽅向称为距离⽅向。
距离向使⽤脉冲压缩技术实现⾼分辨率;⽅位向利⽤多普勒效应,经过相⼲处理得到⾼分辨率。
图1 SAR 的⼏何关系1.2 SAR 信号模型:SAR 信号可以分为距离向信号和⽅位向信号。
⾸先考虑SAR 距离向信号。
SAR 距离像脉冲可表⽰为:()()20()cos 2r rs rect f K T ττπτπτ=+ (1.2.1)其中,r T 为脉冲持续时间,r K 为距离向昧冲的调频率,0f 为中⼼频率,τ以脉神中⼼为参考原点。
任⼀照射时刻的反射能量脉冲波形和照射区域内地⾯反射系数r g 的卷积,如下所⽰:()()()r r s g s τττ=? (1.2.2) 考察距雷达0R 处的⼀个⽬标点,其后向散射系数0σ的幅度为A ,则式(1.2.2)中的()02r g A R cδτ=-,其中c 为光速,02R c 为该点的信号延时。
所以可知,该点⽬标的接收信号为:()()()()200002()cos 222r r rR cs Arect f R c K R c T ττπτπτφ-=-+-+(1.2.3)其中,φ表⽰地表散射过程可能引起的⾸达信号相位改变。
现在考虑⽅位向信号。
由于⼤多数SAR 天线在⽅位⾯内没有加权,其单程⽅向图可以近似为⼀个sin c 函数:()0.886sin a bwP c θθβ??≈(1.2.4) 其中θ为斜距平⾯内测得的与视线的夹⾓,bw β⽅位向波束宽度0.886a L θλ,a L 为⽅位向天线长度。
二次距离压缩算法
二次距离压缩算法(Secondary Range Compressing,SRC)是一种用于合成孔径雷达(SAR)成像处理的算法。
它的主要作用是通过额外的滤波来校正由于方位和距离的耦合而导致的散焦,从而提高SAR成像的精度。
SRC算法的原理是基于斜视距离模型,通过补偿距离频率的三次相位项和波束前视引入的多普勒中心偏移项,来改善大斜视情况下SAR成像距离压缩旁瓣非对称畸变的问题,以及图像位置在方位向发生偏移的问题。
此外,还有一些改进的SRC算法被提出,以提高算法的性能和适用性。
这些改进算法在成像区域中对任意多个点目标进行了成像仿真,结果表明它们具有更高的分辨率和适中的运算量,比传统算法更适合应用于大斜视角成像。
总的来说,SRC算法是一种有效的SAR成像处理算法,它可以提高成像的精度和质量,并适用于各种应用场景。
合成孔径雷达成像算法与实现
合成孔径雷达成像是利用多个雷达发射的信号,经过相位平移和叠加来组合成一幅完整的雷达图像。
合成孔径雷达成像算法具有多种类型。
根据处理思路可以将其分为两大类:基于传感器的算法和基于信号处理的算法。
基于传感器的算法主要利用发射或接收机的位置、射频移相和时间差。
接收机位置关系到雷达合成靶被检测的位置信息。
而射频移相和时间差,则关系到雷达图像后处理中雷达接收和成像之间的信号处理。
基于信号处理的算法,例如合成孔径雷达(SAR)算法,主要基于正交步进技术,用发射信号的时间域响应来表示目标的距离和相位信息。
此外,利用相空间和时间处理技术将发射信号的接收信号进行反演处理,以形成多维数组,最终得到一幅精准的雷达图像。
此外,合成孔径雷达成像还可以利用计算机图形处理技术对图像进行处理,细化图像,提高成像精度,从而使其成为一种有效的距离测量定位工具。
总之,合成孔径雷达成像算法为雷达成像研究提供了多种新的思路,并且在精度、操作效率、低功耗、扩展性等方面的性能都有明显的改善,在成像及目标检测等应用领域有着广泛的应用前景。
合成孔径雷达成像算法SAR Imaging Algorithm谭维贤中国科学院电子学研究所微波成像技术国家级重点实验室一、SAR信号的性质二、Range Doppler Algorithm三、Chirp Scaling Algorithm四、小结一、SAR信号的性质二、Range Doppler Algorithm三、Chirp Scaling Algorithm四、小结)11,20,x x others ⎧≤⎪=⎨⎪⎩(2.47)}2(4.21)载频)LFM信号仿真的结果LFM信号的时域波形,幅度频谱与相位频谱SAR信号的表达式接收信号的实数表达式(4.32)点目标point target 与雷达的距离为,信号延时,信号幅度距离向脉冲包络,地表散射过程中可能引起的信号相位变化 解调后的单个点目标的基带信号可以表示成为复数形式(4.39)a R 2/a R c 0'A ()()()()(){}2000'2/'2/cos 22/2/r pul a r a a r a s A s R c A R c f R c K R c ττωτπτπτψ=−=−−+−+r ωψ()(){}()(){}2000,exp 4/exp 2/r s A j f R c j K R c τηπηπτη−−∼,τη()R η分别为距离向时间(快时间),方位向时间(慢时间),下标r 表示range(距离向),下标a 表示azimuth (方位向),雷达与点目标的距离随着方位向时间发生变化。
点目标仿真的结果点目标回波信号的二维图形(4.9)22R η(5.1)点目标仿真:回波信号幅度灰度图距离向方位向零斜视角(zero squint)情况下单个点目标的时域性质:幅度点目标回波信号的相位(正扫频,双曲线)距离向方位向零斜视角(zero squint)情况下单个点目标的时域性质:相位正扫频:双曲线,up chirp, hyperbolae点目标仿真:点目标回波信号的相位(负扫频,椭圆)距离向方位向零斜视角(zero squint)情况下单个点目标的时域性质:相位负扫频:椭圆,down chirp, ellipse点目标仿真:信号的积分解。
合成孔径雷达波位设计与成像算法概述摘要:合成孔径雷达是一种全天候全天时的高分辨率微波侧视成像雷达。
本文介绍了合成孔径雷达的主要参数,并概括了波位设计方法及成像算法特征,最后对发展趋势进行了展望。
关键词:合成孔径雷达;波位设计;成像处理算法;发展趋势1 概述合成孔径雷达(Synthetic Aperture Radar,SAR)是一种全天候、全天时的现代高分辨率微波侧视成像雷达,在国土测量、环境和灾害监测、地形测绘以及军事侦察等领域发挥了越来越重要的作用。
因此,了解SAR系统的参数特性和成像原理,对SAR系统进行波位设计,得到合理的工作参数,并采用适合的成像算法对SAR回波数据进行成像,是开展SAR成像工作的必备基础。
本文针对SAR的系统特点,概括了SAR系统波位设计的主要方法思路;并通过成像原理,总结了典型了成像算法的特征;最后对目前星载SAR的发展趋势进行了展望。
2 波位设计波位设计是SAR系统设计工作的主要内容。
波位设计主要指根据系统指标要求(空间分辨率、幅宽、数据率或噪声等效后向散射系数等),设计雷达波束的入射角、波束宽度、脉冲发射重复频率(PRF)、回波窗口接收时间和信号带宽等工作参数。
因此需要了解SAR系统的性能参数和工作模式,根据约束条件设计出合理的波位。
2.1 性能参数本文主要介绍空间分辨率、距离向测绘带宽度和噪声等效后向散射系数。
•方位向分辨率两个目标位于同一距离向,但方位角不同的情况下,能够被雷达区分出来的最小方位向长度称为方位向分辨率【1】。
通过分析,合成孔径雷达的分辨率由下式决定:其中为波长,为斜距,为合成孔径长度,其值决定于天线运动过程中所能接收到的同一目标的回波信号的最大作用范围。
以条带模式为例,对合成孔径进行展开,方位向分辨率经过推导后得到:其中为方位向天线尺寸。
•距离向分辨率两个目标位于同一方位角,但与雷达间的距离不同时,二者能被雷达区分出来的最小间距称为距离向分辨率【1】。
SAR雷达目标信号模拟器案例SAR(合成孔径雷达)是一种利用机载或航天器载体的高频电磁波进行观测和成像的遥感技术。
它在地理测绘、资源勘探、环境监测和军事领域等方面具有广泛的应用。
SAR雷达目标信号模拟器是一种重要的工具,可以用于研究和开发SAR雷达成像算法和目标识别技术。
SAR雷达目标信号模拟器可以产生各种类型的目标信号,包括点目标、角落反射、散射中心等。
它模拟了雷达的工作原理和系统的各种参数,如雷达的工作频率、天线的相控阵特性、接收器的带宽等。
通过调节这些参数,我们可以生成各种不同的目标信号,并且可以以不同的方式改变目标信号的特征,如信号的极化、频率、幅度等。
对于点目标,SAR雷达目标信号模拟器可以生成具有特定强度和位置的目标回波信号。
这些目标信号可以用于检验目标识别算法的性能,并且可以用于评估算法的健壮性和鲁棒性。
对于角落反射和散射中心,SAR雷达目标信号模拟器可以模拟不同类型的目标,如车辆和建筑物等。
通过改变目标的形状、材料和运动状态,我们可以生成各种不同的目标信号,并且可以用于研究目标形状和材料对雷达回波信号的影响。
SAR雷达目标信号模拟器还可以模拟雷达的运动和姿态。
通过改变雷达的运动速度、方向和俯仰角,我们可以模拟不同的观测条件和成像几何。
这对于研究雷达观测的空间分辨率和信噪比的影响非常重要。
此外,SAR雷达目标信号模拟器还可以模拟实际环境中的杂波干扰和噪声。
通过生成具有不同背景和干扰的合成孔径雷达图像,我们可以研究杂波干扰和噪声对目标检测和成像质量的影响。
总之,SAR雷达目标信号模拟器是一种非常有用的工具,可以用于研究和开发SAR雷达成像算法和目标识别技术。
它可以产生各种类型的目标信号,并且可以模拟雷达的各种参数和运动姿态。
通过使用SAR雷达目标信号模拟器,我们可以评估不同算法的性能,并且可以改进算法的设计和实现。
此外,SAR雷达目标信号模拟器还可以用于培训和教育目的,以提高学生和研究人员对SAR雷达技术的理解和应用能力。
合成孔径雷达sar孔径合成原理合成孔径雷达(Synthetic Aperture Radar,SAR)是一种利用雷达原理进行成像的技术。
它通过接收并记录多个雷达回波信号,利用信号之间的时差信息进行数据处理,从而实现高分辨率的成像效果。
SAR孔径合成原理是SAR技术中的关键部分,本文将从原理、实现过程和应用等方面进行阐述。
一、合成孔径雷达SAR孔径合成原理SAR技术中的“合成孔径”指的是通过对多个雷达回波信号进行合成处理,模拟出一个大的孔径来实现高分辨率成像。
具体来说,SAR 系统通过平行于飞行方向的运动,接收来自地面的雷达回波信号,利用这些信号之间的时差信息进行合成处理,从而达到高分辨率的成像效果。
SAR孔径合成的原理可以简单地描述为:对于一个雷达回波信号,它的频谱表示了地物反射的能量分布情况。
而通过对多个回波信号进行合成处理,可以将各个回波信号的频谱叠加在一起,从而增强地物反射信号的强度。
这样,就能够获得更高分辨率、更清晰的图像。
二、合成孔径雷达SAR的实现过程SAR孔径合成的实现过程可以分为以下几个步骤:1. 发射雷达波束:SAR系统首先发射一束狭窄的雷达波束,向地面发送脉冲信号。
2. 接收回波信号:地面上的目标物体会反射回来一部分信号,SAR 系统接收并记录下这些回波信号。
3. 信号处理:将接收到的回波信号进行时频分析,得到每个回波信号的频谱信息。
4. 孔径合成:对多个回波信号进行合成处理,将它们的频谱信息叠加在一起。
5. 图像重构:通过对合成后的信号进行逆变换,得到高分辨率的SAR图像。
三、合成孔径雷达SAR的应用SAR技术具有很广泛的应用领域,如地质勘探、军事侦察、环境监测等。
以下是几个典型的应用案例:1. 地质勘探:SAR技术可以对地下的地质结构进行探测,用于寻找矿产资源、寻找地下水等。
2. 军事侦察:SAR技术可以在天气恶劣的情况下进行侦察,对地面目标进行高清晰度成像。
3. 环境监测:SAR技术可以用于监测冰川、海洋、森林等自然环境的变化,提供重要的环境保护和资源管理信息。
- 1 - 合成孔径雷达(SAR)的点目标仿真成像 电子与通信工程 侯智深 MF0923008
一. SAR原理简介 合成孔径雷达(Synthetic Aperture Radar ,简称SAR)是一种高分辨率成像雷达技术。它利用脉冲压缩技术获得高的距离向分辨率,利用合成孔径原理获得高的方位向分辨率,从而获得大面积高分辨率雷达图像。 SAR回波信号经距离向脉冲压缩后,雷达的距离分辨率由雷达发射信号带宽决定:
2rrCB
,式中r表示雷达的距离分辨率,rB表示雷达发射信号带宽,C表示光速。同
样,SAR回波信号经方位向合成孔径后,雷达的方位分辨率由雷达方位向的多谱勒带宽决定:aa
a
vB
,式中a表示雷达的方位分辨率,aB表示雷达方位向多谱勒带宽,av表示方位
向SAR平台速度。 二. SAR的成像模式和空间几何关系 根据SAR波束照射的方式,SAR的典型成像模式有Stripmap(条带式),Spotlight(聚束式)和Scan(扫描模式),如图。条带式成像是最早研究的成像模式,也是低分辨率成像最简单最有效的方式;聚束式成像是在一次飞行中,通过不同的视角对同一区域成像,因而能获得较高的分辨率;扫描模式成像较少使用,它的信号处理最复杂。
SAR典型的成像模式 这里分析SAR点目标回波时,只讨论正侧式Stripmap SAR,正侧式表示SAR波束中心和SAR平台运动方向垂直,如图2.2,选取直角坐标系XYZ为参考坐标系,XOY平面为地平面;SAR平台距地平面高h,沿X轴正向以速度V匀速飞行;P点为SAR平台的位置矢量,
设其坐标为(x,y,z); T点为目标的位置矢量,设其坐标为(,,)TTTxyz;由几何关系,目标与SAR平台的斜距为: 222()()()TTTPTxxyyzz
由图可知:0,,0Tyzhz;令xvs,其中v为平台速度,s为慢时间变量(slow time), - 2 -
假设Txvs,其中s表示SAR平台的x坐标为Tx的时刻;再令22TrHy,r表示目标与SAR的垂直斜距,重写2.1式为: 2220(;)()PTRsrrvss
(;)Rsr就表示任意时刻s时,目标与雷达的斜距。一般情况下,0vssr,于是上式
可近似写为: 2222200(;)()()2vRsrrvssrssr
可见,斜距是sr和的函数,不同的目标,r也不一样,但当目标距SAR较远时,在观测带内,可近似认为r不变,即0rR。
空间几何关系 (a)正视图 (b)侧视图 图 (a)中,Lsar表示合成孔径长度,它和合成孔径时间Tsar的关系是LsarvTsar。(b)中,为雷达天线半功率点波束角,为波束轴线与Z轴的夹角,即波束视角,minR为近距点距离,maxR为远距点距离,W为测绘带宽度,它们的关系为:
22min()max()maxminRHtgRHtgWRR - 3 -
三. 点目标SAR的成像处理算法仿真 SAR的回波数据不具有直观性,不经处理人无法理解它。从原理上讲,SAR成像处理的过程是从回波数据中提取目标区域散射系数的二维分布,本质上是一个二维相关处理过程,因此最直接的处理方法是对回波进行二维匹配滤波,但其运算量很大,再加上SAR的数据率本来就高,这使得实时处难于实现。通常,可以把二维过程分解成距离向和方位向两个一维过程,Range-Dopper Algorithm(简称RD算法)就是采用这种思想的典型算法。
SAR的点目标仿真结果 - 4 - 两点目标的回波仿真3D图
两点目标压缩后的3dB等高线图 附录:SAR的点目标仿真Matlab程序 主程序:stripmapSAR.m %%================================================================ %%Filename: stripmapSAR.m %%Help file: stripmapSAR.doc %%Project: Stripmap SAR Simulation using point targets and Reconstrction - 5 -
%% with Range-Doppler Algorithm %%Author: houzhishen ,nju,2010/6 %%================================================================ clear;clc;close all; %%================================================================ %%Parameter--constant C=3e8; %propagation speed %%Parameter--radar characteristics Fc=1e9; %carrier frequency 1GHz lambda=C/Fc; %wavelength %%Parameter--target area Xmin=0; %target area in azimuth is within[Xmin,Xmax] Xmax=50; Yc=10000; %center of imaged area Y0=500; %target area in range is within[Yc-Y0,Yc+Y0] %imaged width 2*Y0 %%Parameter--orbital information V=100; %SAR velosity 100 m/s H=5000; %height 5000 m R0=sqrt(Yc^2+H^2); %%Parameter--antenna D=4; %antenna length in azimuth direction Lsar=lambda*R0/D; %SAR integration length Tsar=Lsar/V; %SAR integration time %%Parameter--slow-time domain Ka=-2*V^2/lambda/R0; %doppler frequency modulation rate Ba=abs(Ka*Tsar); %doppler frequency modulation bandwidth PRF=Ba; %pulse repitition frequency PRT=1/PRF; %pulse repitition time ds=PRT; %sample spacing in slow-time domain Nslow=ceil((Xmax-Xmin+Lsar)/V/ds); %sample number in slow-time domain Nslow=2^nextpow2(Nslow); %for fft sn=linspace((Xmin-Lsar/2)/V,(Xmax+Lsar/2)/V,Nslow);%discrete time array in slow-time domain PRT=(Xmax-Xmin+Lsar)/V/Nslow; %refresh PRF=1/PRT; ds=PRT; fu=linspace(-1/2/PRT,1/2/PRT,Nslow);%fu域序列 %%Parameter--fast-time domain Tr=5e-6; %pulse duration 10us Br=30e6; %chirp frequency modulation bandwidth 30MHz Kr=Br/Tr; %chirp slope Fsr=3*Br; %sampling frequency in fast-time domain dt=1/Fsr; %sample spacing in fast-time domain Rmin=sqrt((Yc-Y0)^2+H^2); - 6 -
Rmax=sqrt((Yc+Y0)^2+H^2+(Lsar/2)^2); Nfast=ceil(2*(Rmax-Rmin)/C/dt+Tr/dt);%sample number in fast-time domain Nfast=2^nextpow2(Nfast); %for fft tm=linspace(2*Rmin/C,2*Rmax/C+Tr,Nfast); %discrete time array in fast-time domain dt=(2*Rmax/C+Tr-2*Rmin/C)/Nfast; %refresh Fsr=1/dt; f=linspace(-1/2/dt,1/2/dt,Nfast);%f域序列 %%Parameter--resolution DY=C/2/Br; %range resolution DX=D/2; %cross-range resolution %%Parameter--point targets Ntarget=3; %number of targets %format [x, y, reflectivity] Ptarget=[Xmin,Yc,1 %position of targets Xmin,Yc+10*DY,1 Xmin+20*DX,Yc+50*DY,1]; disp('Parameters:') disp('Sampling Rate in fast-time domain');disp(Fsr/Br) disp('Sampling Number in fast-time domain');disp(Nfast) disp('Sampling Rate in slow-time domain');disp(PRF/Ba) disp('Sampling Number in slow-time domain');disp(Nslow) disp('Range Resolution');disp(DY) disp('Cross-range Resolution');disp(DX) disp('SAR integration length');disp(Lsar) disp('Position of targets');disp(Ptarget) %%================================================================ %%Generate the raw signal data K=Ntarget; %number of targets N=Nslow; %number of vector in slow-time domain M=Nfast; %number of vector in fast-time domain T=Ptarget; %position of targets Srnm=zeros(N,M); for k=1:1:K sigma=T(k,3); Dslow=sn*V-T(k,1); R=sqrt(Dslow.^2+T(k,2)^2+H^2); tau=2*R/C; Dfast=ones(N,1)*tm-tau'*ones(1,M); phase=pi*Kr*Dfast.^2-(4*pi/lambda)*(R'*ones(1,M));