真实和合成孔径雷达
- 格式:pdf
- 大小:5.50 MB
- 文档页数:24
合成孔径雷达的作用
合成孔径雷达(Synthetic Aperture Radar,SAR)是一种通过合成天线的运动以达到虚拟的长天线长度的雷达系统。
与传统雷达不同,SAR 具有很多独特的优势,其主要作用包括:
1. 高分辨率成像:
-SAR 可以提供高分辨率的地表成像。
通过运动合成孔径,可以获得与雷达波长相比大得多的有效孔径,从而实现对地物的高精度成像。
2. 独立于天气和光照条件:
-SAR 在观测时不受天气和光照的限制,可以在夜晚或云层下观测。
这使得它在不同环境下都能提供稳定的数据。
3. 地形高度测量:
-SAR 通过测量雷达波与地表之间的相位差,可以生成数字高程模型,从而实现对地形高度的准确测量。
4. 监测地表形变:
-SAR 可以监测地表的微小形变,例如地震引起的地表位移,为地质灾害的监测提供有力支持。
5. 地表类型分类:
-利用SAR 的极化信息,可以对地表类型进行分类,例如,识别植被、水体、建筑物等不同地物。
6. 海洋监测:
-SAR 在海洋监测方面有着广泛应用,可以检测海浪、潮汐、海洋表面风向和海冰等信息。
7. 环境监测:
-SAR 可以用于监测土地覆盖变化、森林健康状况、湿地变化等环境因素,为资源管理和环境保护提供数据支持。
8. 军事应用:
- SAR 在军事领域具有重要作用,可用于目标检测、场地勘察、地形分析等。
总体而言,合成孔径雷达是一种强大的遥感工具,其高分辨率、全天候性和独立于自然光的特性使得它在多个领域都有广泛的应用。
遥感问答之SAR、InSAR、D-InSAR ⼩课堂在地质灾害监测相关场合中经常会出现“SAR”、“InSAR”、“D-InSAR”这些名词的⾝影,那么是如何⼯作的?针对这些问题,在什么是SAR? SAR有什么特征?InSAR、D-InSAR是如何⼯作的?究竟什么是这⾥和⼤家⼀起学习⼀下关于SAR的那些事。
什么是SAR?SAR是指雷达成像系统中的合成孔径雷达(Synthetic Aperture Radar),与之相对的是真实孔径雷达(Real Aperture Radar,RAR)。
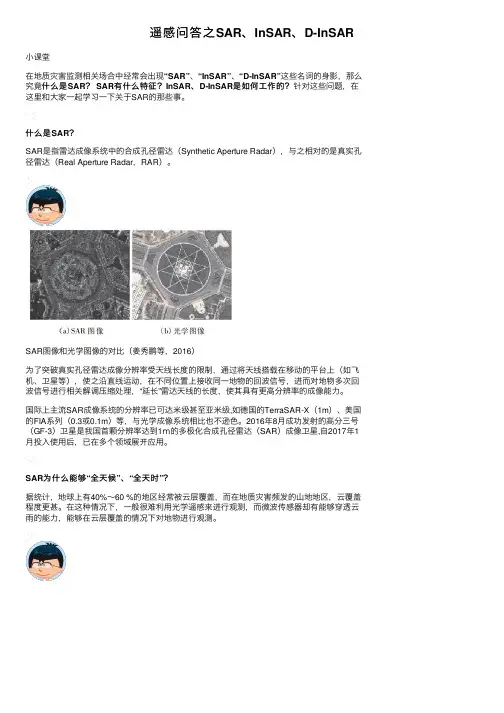
SAR图像和光学图像的对⽐(姜秀鹏等,2016)为了突破真实孔径雷达成像分辨率受天线长度的限制,通过将天线搭载在移动的平台上(如飞机、卫星等),使之沿直线运动,在不同位置上接收同⼀地物的回波信号,进⽽对地物多次回波信号进⾏相关解调压缩处理,“延长”雷达天线的长度,使其具有更⾼分辨率的成像能⼒。
国际上主流SAR成像系统的分辨率已可达⽶级甚⾄亚⽶级,如德国的TerraSAR-X(1m)、美国的FIA系列(0.3或0.1m)等,与光学成像系统相⽐也不逊⾊。
2016年8⽉成功发射的⾼分三号(GF-3)卫星是我国⾸颗分辨率达到1m的多极化合成孔径雷达(SAR)成像卫星,⾃2017年1⽉投⼊使⽤后,已在多个领域展开应⽤。
SAR为什么能够“全天候”、“全天时”?据统计,地球上有40%~60 %的地区经常被云层覆盖,⽽在地质灾害频发的⼭地地区,云覆盖程度更甚。
在这种情况下,⼀般很难利⽤光学遥感来进⾏观测,⽽微波传感器却有能够穿透云⾬的能⼒,能够在云层覆盖的情况下对地物进⾏观测。
微波传感器(ASAR,灰⾊图)的云穿透效果,彩⾊底图底图为光学传感器(MERIS)(图源:Space in Images© ESA)根据传感器能够接受电磁波频率的不同,可将对地观测系统⼤致可分为两类,即光学遥感和微波遥感。
微波的波长处于1mm~1000 mm范围内,⾜够长的波长使其能够绕过云层的粒⼦结构进⾏传播,也就是“衍射现象”;波长⼤于3 cm的微波甚⾄可以在⼤⾬环境下传播。
合成孔径雷达原理合成孔径雷达(Synthetic Aperture Radar,简称SAR)是一种利用合成孔径技术获取地面目标信息的雷达系统。
合成孔径雷达通过利用雷达与飞行器(如卫星、飞机等)的运动合成一个大孔径,在距离上实现超分辨能力,从而实现对地面目标的高分辨率成像。
合成孔径雷达的工作原理如下:首先,发射器发射一束雷达波束,并接收目标反射回来的信号。
接收到的信号经过放大和混频等处理后,得到一连串雷达回波数据。
然后,这些回波数据被存储下来。
为了实现合成孔径雷达的高分辨率成像,需要通过飞行器的运动合成一个大孔径。
首先,飞行器沿着固定轨迹匀速飞行,在飞行的过程中,持续接收并记录目标的回波数据。
这些回波数据来自不同位置、不同时间上的目标反射。
在数据处理阶段,首先根据飞行器的速度和航向信息对回波数据进行校正,以消除因飞行器运动而引入的效应。
然后,将校正后的回波数据进行时域信号处理,如滤波、相位校正等。
接着,利用这些回波数据,进行合成孔径处理。
合成孔径处理的目标是将由不同位置和时间上的多个小孔径雷达所获取的回波数据合成为一个大孔径。
通常采用的方法是将这些回波数据叠加在一起,通过加权平均的方式获取高分辨率成像结果。
加权的原则是使得距离较远的目标点,其在不同位置和时间上的回波数据相位一致,从而进行叠加时能够增强目标特征。
最后,根据合成孔径雷达的系统参数和地面场景的需求,进行进一步的数据处理,如图像去噪、图像增强等操作,得到清晰的高分辨率合成孔径雷达图像。
总之,合成孔径雷达通过利用合成孔径技术,通过飞行器的运动合成一个大孔径,实现了对地面目标的高分辨率成像。
这种雷达系统在军事、航空、地质勘探等领域具有广泛的应用前景。

合成孔径雷达通俗原理合成孔径雷达(Synthetic Aperture Radar,简称SAR)是一种利用雷达原理进行成像的技术。
它通过利用合成孔径的方法,实现对地面目标进行高分辨率成像,具有天气无阻、全天候、全天时的优势。
本文将以通俗易懂的方式介绍合成孔径雷达的原理。
合成孔径雷达的原理其实很简单,就像我们拍照一样。
当我们拍摄一个远处的景物时,如果我们站在一个固定的位置上,远处的景物看起来会比较模糊,细节不清晰。
但是如果我们移动一段距离,再拍摄同样的景物,然后将这些照片拼接在一起,就可以得到一张清晰、高分辨率的图片。
合成孔径雷达也是利用了这个原理。
合成孔径雷达的工作原理是通过飞行器或卫星搭载的雷达设备,向地面发射一束微波信号。
当这束微波信号遇到地面上的目标时,会被反射回来。
雷达设备接收到这些反射回来的信号后,会记录下它们的时间和强度。
然而,合成孔径雷达并不仅仅只有一次测量。
它会重复这个过程,不断地向地面发射微波信号,并记录下每一次接收到的反射信号。
这些信号会被组合起来,形成一组复杂的数据。
接下来,这组数据会经过一系列的信号处理和计算。
首先,雷达设备会对数据进行时频处理,将不同时刻接收到的信号进行整理,使它们能够对齐。
然后,雷达设备会对数据进行相位校准,消除由于飞行器或卫星的运动而导致的相位差异。
接着,合成孔径雷达会利用这组校准后的数据进行合成孔径成像。
它会将数据分成小块,并对每一块进行处理。
这个过程类似于我们拍照时对多张照片进行拼接的过程。
合成孔径雷达会将每一块数据进行叠加,形成一张高分辨率的雷达图像。
合成孔径雷达会对图像进行后处理,并进行显示或保存。
这样,我们就可以清晰地看到地面上的目标,包括建筑、地形、水体等。
而且,由于合成孔径雷达的工作原理,它可以在任何时间、任何天气条件下进行成像,不受自然光线的限制。
合成孔径雷达的原理虽然简单,但是它在实际应用中有着广泛的用途。
例如,在地质勘探中,合成孔径雷达可以用来探测地下的矿藏和地层结构;在军事领域,合成孔径雷达可以用来进行目标侦测和情报收集;在环境监测中,合成孔径雷达可以用来监测海洋、冰雪等自然环境的变化。
合成孔径雷达应用场景合成孔径雷达(Synthetic Aperture Radar,简称SAR)是一种利用运动平台(如卫星、飞机或舰船)上的雷达设备通过合成的方式获取高分辨率、高精度雷达图像的技术。
与传统雷达相比,SAR具有独特的特点和广泛的应用场景。
1. 军事侦察与情报收集合成孔径雷达在军事领域具有重要的应用,可以通过对地面目标进行高分辨率成像,获取具有丰富细节信息的图像。
这一技术可以用于军事侦察、目标识别和情报收集等领域,有助于提高作战能力、增强决策支持。
2. 地质勘探与资源调查合成孔径雷达可以在地表以下多米至数十米深度范围内,探测到地下的地质和水文构造的细微变化。
通过雷达反射信号的分析,可以获取地下岩层结构、水资源分布、地下油气藏等重要信息,是石油、地质和水文勘探的重要手段。
3. 气象灾害监测与预警合成孔径雷达可以获取大范围、高时空分辨率的天气图像,包括降雨型态、风速、降水量等信息。
通过对这些信息的分析,可以实现对气象灾害如台风、暴雨、洪水等的监测与预警,有助于减轻自然灾害对人类和财产的损失。
4. 海洋监测与资源调查合成孔径雷达可实现对海洋表面的测量,如海浪、海流、海洋表面高度等参数。
这些数据对于海洋环境监测、海上交通管理、渔业资源调查等具有重要意义。
同时,合成孔径雷达还可通过反射信号对海洋底质地形进行测量,帮助寻找潜艇、探测水下障碍物,是海洋领域的重要工具。
5. 土地利用与城市规划合成孔径雷达可以获取高分辨率、大范围的地表图像,包括土地利用类型、地表变化等信息。
这些数据对于土地利用规划、城市建设规划等有着重要作用。
同时,合成孔径雷达还可以获取建筑物的高程、形状等信息,为城市规划和建筑工程提供精准数据。
总之,合成孔径雷达作为一种高分辨率、高精度的雷达成像技术,具有广泛的应用场景。
在军事、地质、气象、海洋和城市等领域,合成孔径雷达都能够提供有价值的信息,对于提高工作效率、改善决策能力、减轻灾害风险等具有重要意义。

合成孔径雷达成像原理合成孔径雷达(Synthetic Aperture Radar,SAR)是一种通过合成天线口径来实现高分辨率雷达成像的技术。
它利用雷达信号的相位信息,通过对多个脉冲回波信号进行处理,从而获得高分辨率的地物图像。
合成孔径雷达成像技术在军事侦察、地质勘探、环境监测等领域具有广泛的应用价值。
合成孔径雷达成像原理主要包括以下几个方面:1. 雷达信号的合成孔径。
合成孔径雷达通过合成天线口径的方式,实现了远距离成像时的高分辨率。
传统雷达的分辨率受限于天线口径,而合成孔径雷达则通过合成大于天线实际尺寸的虚拟孔径,从而获得了远超实际天线口径的分辨率。
这种合成孔径的方法有效地克服了传统雷达成像分辨率受限的问题。
2. 雷达信号的相位信息。
合成孔径雷达利用雷达信号的相位信息来实现高分辨率成像。
相位信息可以提供目标在距离和方位上的精确位置,从而实现对地物的高精度成像。
相位信息的提取和处理是合成孔径雷达成像的关键技术之一。
3. 多普勒频移校正。
合成孔径雷达在成像过程中需要对目标的多普勒频移进行校正。
由于合成孔径雷达通常以飞行器或卫星平台载荷的形式存在,因此在目标运动造成的多普勒频移方面需要进行有效的校正,以获得高质量的成像结果。
4. 信号处理和成像。
合成孔径雷达成像过程中需要进行大量的信号处理和数据处理工作。
这包括对回波信号的相位信息提取、多普勒频移校正、图像重构等。
通过这些信号处理和数据处理工作,最终可以获得高分辨率、高质量的地物图像。
总的来说,合成孔径雷达成像原理是利用合成孔径、相位信息提取、多普勒频移校正和信号处理等关键技术,实现了远距离雷达成像的高分辨率和高质量。
合成孔径雷达成像技术在军事、民用领域具有广泛的应用前景,将在未来得到更加广泛的发展和应用。
合成孔径雷达(SAR)合成孔径雷达(SAR)数据拥有独特的技术魅力和优势,渐成为国际上的讨论热点之一,其应用领域越来越广泛。
SAR数据可以全天候对讨论区域进行量测、分析以及猎取目标信息。
高级雷达图像处理工具SARscape,能让您轻松将原始SAR数据进行处理和分析,输出SAR图像产品、数字高程模型(DEM)和地表形变图等信息,应用永久散射体PS、短基线处理SBAS 等方法快速精确地猎取大范围形变信息,并可以将提取的信息与光学遥感数据、地理信息集成在一起,全面提升SAR数据应用价值。
基本概念合成孔径雷达就是采用雷达与目标的相对运动把尺寸较小的真实天线孔径用数据处理的方法合成一较大的等效天线孔径的雷达,也称综合孔径雷达。
合成孔径雷达的特点是辨别率高,能全天候工作,能有效地识别伪装和穿透掩盖物。
所得到的高方位辨别力相当于一个大孔径天线所能供应的方位辨别力。
分类合成孔径雷达可分为聚焦型和非聚焦型两类。
用在飞机上或空间飞行器上可有几种不同的工作模式,最常见的是正侧视模式,称为合成孔径侧视雷达;此外还有斜视模式、多普勒波束锐化模式和定点照耀模式等。
假如雷达保持相对静止,使目标运动成像,则成为逆合成孔径雷达,也称距离-多普勒成像系统。
合成孔径雷达在军事侦察、测绘、火控、制导,以及环境遥感和资源勘探等方面有广泛用途。
进展概况合成孔径的概念始于50年月初期。
当时,美国有些科学家想突破经典辨别力的限制,提出了一些新的设想:采用目标与雷达的相对运动所产生的多普勒频移现象来提高辨别力;用线阵天线概念证明运动着的小天线可获得高辨别力。
50年月末,美国研制成第一批可供军事侦察用的机载高辨别力合成孔径雷达。
60年月中期,随着遥感技术的进展,军用合成孔径雷达技术推广到民用方面,成为环境遥感的有力工具。
70年月后期,卫星载合成孔径雷达和数字成像技术取得进展。
美国于1978年放射的〃海洋卫星〃A号和80年月初放射的航天飞机都试验了合成孔径雷达的效果,证明白雷达图像的优越性。
合成孔径雷达通俗原理介绍合成孔径雷达 (Synthetic Aperture Radar, SAR) 是一种利用合成孔径信号处理技术获取高分辨率雷达影像的无源遥感技术。
它通过利用雷达平台的运动合成长虚拟孔径,使得合成孔径雷达在距离、方位和俯仰三个维度上都具有高分辨能力。
本文将详细介绍合成孔径雷达的通俗原理。
一、雷达原理回顾合成孔径雷达基于雷达原理,首先我们来回顾雷达的基本原理。
雷达是一种利用电磁波进行测距和目标识别的装置。
它工作原理是向目标发射电磁波,接收目标反射回来的电磁波,根据接收到的信号来计算目标与雷达之间的距离、方位和速度等信息。
1. 发射信号雷达发射器会产生一定频率的电磁波,通常使用微波波段的信号,具有较强的穿透能力。
这些发射信号会被天线辐射出去,形成一个电磁波束。
2. 目标反射当发射信号遇到目标时,部分信号会被目标散射和反射回来。
目标散射和反射回来的信号中包含有关目标的特征信息。
3. 接收信号雷达接收器会接收到目标反射回来的信号,然后对其进行放大、滤波和解调等处理。
4. 信号处理接收信号经过处理后,可以获取目标与雷达之间的距离、方位、速度等信息。
这些信息可以用来绘制雷达图像或者进行目标识别。
二、合成孔径雷达原理合成孔径雷达通过信号处理技术,在距离和方位上合成一个长虚拟孔径,从而获得高分辨率雷达影像。
下面我们详细介绍合成孔径雷达的原理。
1. 移动平台合成孔径雷达通常需要通过移动平台,如航天器、飞机或车辆等,来完成一定距离上的平移。
这个平移过程中,雷达平台会发射多个脉冲信号。
2. 多普勒效应雷达发射的每个脉冲信号经过一段时间后到达目标并反射回来,由于平台的移动,目标上的反射信号会发生多普勒频移。
3. 信号叠加合成孔径雷达会收集多个不同位置上的目标反射信号,并将其叠加在一起。
这样一来,平台移动过程中接收到的信号就相当于是在一个长虚拟孔径上获取到的。
4. 信号处理接收到的信号经过一系列信号处理技术,如多普勒校正、脉冲压缩等,可以得到高分辨率的合成孔径雷达影像。
北京揽宇方圆信息技术有限公司SAR卫星-合成孔径雷达卫星影像基础知识介绍目前使用最广的成像雷达系统就是合成孔径雷达(Synthetic Aperture Radar:SAR),SAR几乎成为了雷达的代名词。
本文从应用角度介绍SAR系统的基本知识。
本文主要包括:SAR基本原理几个重要的参数SAR拍摄模式当前主流星载SAR系统1.SAR基本原理雷达发展初期,出现的是真实孔径雷达(Real Aperture Radar:RAR),由于成像分辨率与雷达天线的长度成正比,与波长和观测距离成反比,要想得到较高分辨率的SAR图像,需要增加天线的物理尺寸,限制其发展和应用,后来逐渐被合成孔径雷达SAR取代。
SAR用一个小天线作为单个辐射单元,将此单元沿一直线不断移动,在不同位置上接收同一地物的回波信号并进行相关解调压缩处理。
一个小天线通过"运动"方式就合成一个等效"大天线",这样可以得到较高的方位向分辨率,同时方位向分辨率与距离无关,这样SAR就可以安装在卫星平台上而可以获取较高分辨率的SAR图像。
图:SAR成像原理示意图2.SAR几个重要的参数为了更好的理解SAR和SAR图像,需要知道几个重要的参数。
2.1分辨率SAR图像分辨率包括距离向分辨率(Range Resolution)和方位向分辨率(Azimuth Resolution)。
图:距离向和方位向示意图距离向分辨率(Range Resolution)垂直飞行方向上的分辨率,也就是侧视方向上的分辨率。
距离向分辨率与雷达系统发射的脉冲信号相关,与脉冲持续时间成正比:Res(r)=c*τ/2其中c为光速,τ为脉冲持续时间。
方位向分辨率(Azimuth Resolution)沿飞行方向上的分辨率,也称沿迹分辨率。
如下为推算过程:•真实波束宽度:β=λ/D•真实分辨率:ΔL=β*R=Ls(合成孔径长度)•合成波束宽度βs=λ/(2*Ls)=D/(2*R)•合成分辨率ΔLs=βs*R=D/2其中λ为波长,D为雷达孔径,R为天线与物体的距离。
边坡变形监测雷达技术对比前言:目前国际上使用的边坡变形监测雷达按工作原理划分主要有两种,一种是合成孔径雷达,另一种是真实孔径雷达。
这两种雷达在技术原理、工作范围、参数校正、预测预警等方面有较大差别,本文主要从两种技术的原理出发,讨论不同雷达技术在边坡监测方面的异同。
1.边坡监测雷达技术简介目前边坡变形监测雷达技术已经在全世界范围内获得广泛的应用,这项新的技术与传统边坡变形监测方法(例如安装测量棱镜或传感器的常规边坡监测方法)相比,使用雷达进行边坡稳定性监测有以下优点:1.监测精度高,雷达能以毫米以下级精度获取边坡变形数据;2.测量可覆盖整个边坡;3.系统可自动获得或读取已有的DTM(数字地形图)数据,兼容多种GIS数据,在三维环境下显示监测结果;4.空间分辨率高,能监测到被测区域表面很小的区域变形,采样间隔短,方便确定目标监测区内最大位移发生的位置,便于风险管理,可避免常规监测中常发生的采样周期间隔较长和数据不连续或丢失等问题;5.监测位置选择灵活,能够在较远的距离对存在隐患的边坡进行监测;6.无需在被测边坡上布设固定监测设备,即使发生边坡失稳事故,也不会造成监测设备的损失;7.可以对边坡事故进行全过程的连续监测,并能在后期对事故区域继续监测、评估。
虽然使用雷达进行边坡监测具有以上一些优点,但是对于不同的雷达技术,其在各方面的表现能力和实际应用能力则各有差异,本文将针对合成孔径雷达和真实孔径雷达进行详细的技术和应用对比。
2.边坡监测雷达代表产品2.1合成孔径雷达以意大利IDS公司的IBIS系列产品为代表(见图1),该公司提供基于合成孔径雷达技术的边坡监测雷达。
图1 意大利IDS公司的IBIS‐M边坡监测雷达合成孔径雷达技术衍生于航空航天地球测绘技术,其具有扫描距离远,范围大的特点,但是其扫描所得图像为二维图像,在边坡监测领域应用时需有相关DTM数据的支持才能转换为三维图像,进而对边坡位移进行监测,DTM数据本身带有一定的误差,从而影响了该技术测量边坡三维变形精度。
合成孔径雷达概述1合成孔径雷达简介 (2)1.1 合成孔径雷达的概念 (2)1.2 合成孔径雷达的分类 (3)1.3 合成孔径雷达(SAR)的特点 (4)2合成孔径雷达的发展历史 (5)2.1 国外合成孔径雷达的发展历程及现状 (5)2.1.1 合成孔径雷达发展历程表 (6)2.1.2 世界各国的SAR系统 (9)2.2 我国的发展概况 (11)2.2.1 我国SAR研究历程表 (11)2.2.2 国内各单位的研究现状 (12)2.2.2.1 电子科技大学 (12)2.2.2.2 中科院电子所 (12)2.2.2.3 国防科技大学 (13)2.2.2.4 西安电子科技大学 (13)3 合成孔径雷达的应用 (13)4 合成孔径雷达的发展趋势 (14)4.1 多参数SAR系统 (15)4.2 聚束SAR (15)4.3极化干涉SAR(POLINSAR) (16)4.4合成孔径激光雷达(Synthetic Aperture Ladar) (16)4.5 小型化成为星载合成孔径雷达发展的主要趋势 (17)4.6 性能技术指标不断提高 (17)4.7 多功能、多模式是未来星载SAR的主要特征 (18)4.8 雷达与可见光卫星的多星组网是主要的使用模式 (18)4.9 分布SAR成为一种很有发展潜力的星载合成孔径雷达 (18)4.10 星载合成孔径雷达的干扰与反干扰成为电子战的重要内容 (19)4.11 军用和民用卫星的界线越来越不明显 (19)5 与SAR相关技术的研究动态 (20)5.1 国内外SAR图像相干斑抑制的研究现状 (20)5.2 合成孔径雷达干扰技术的现状和发展 (20)5.3 SAR图像目标检测与识别 (22)5.4 恒虚警技术的研究现状与发展动向 (25)5.5 SAR图像变化检测方法 (27)5.6 干涉合成孔径雷达 (31)5.7 机载合成孔径雷达技术发展动态 (33)5.8 SAR图像地理编码技术的发展状况 (35)5.9 星载SAR天线方向图在轨测试的发展状况 (37)5.10 逆合成孔径雷达的发展动态 (38)5.11 干涉合成孔径雷达的发展简史与应用 (38)合成孔径雷达概述1合成孔径雷达简介合成孔径雷达(Synthetic Aperture Radar,简称SAR)是一种全天候、全天时的现代高分辨率微波成像雷达。
合成孔径雷达的工作原理合成孔径雷达(Synthetic Aperture Radar,简称SAR)是一种通过合成大孔径来实现高分辨率成像的雷达技术。
它通过雷达系统的运动和相干信号处理技术,利用地面或海面目标反射回来的雷达信号,综合多个方向的回波数据,实现高分辨率、高质量的成像。
合成孔径雷达的工作原理基于以下几个关键步骤:1. 发射雷达信号:合成孔径雷达首先通过发射器发送雷达信号,这些信号以一定的频率和极化方式向目标发送。
雷达信号可以是脉冲信号,也可以是连续波信号。
脉冲信号具有高峰值功率,能够提供较高的测量精度,而连续波信号则能够提供更高的测量速度。
2. 接收回波信号:当雷达信号遇到地面或海面目标时,一部分信号会被目标反射回来形成回波信号。
合成孔径雷达通过接收器接收回波信号,并记录下信号的幅度、相位和到达时间。
3. 雷达系统的运动:为了实现合成大孔径的效果,合成孔径雷达通常需要进行运动。
雷达系统可以通过飞行器、卫星或舰船等载体进行运动。
运动过程中,雷达系统会不断接收目标的回波信号,形成多个方向的数据。
4. 相干信号处理:合成孔径雷达采用相干信号处理技术来综合不同方向的回波信号。
相干信号处理主要包括距离压缩、多普勒频移校正、方位向压缩和图像合成等步骤。
- 距离压缩:合成孔径雷达接收到的回波信号会受到传播距离的影响而发生扩散。
距离压缩技术通过对回波信号进行傅里叶变换来压缩信号的频带宽度,从而提高距离分辨率。
- 多普勒频移校正:由于雷达系统运动导致回波信号发生多普勒频移,合成孔径雷达需要对回波信号进行多普勒频移校正,以消除多普勒频移的影响,保证成像的准确性。
- 方位向压缩:雷达系统运动期间,由于目标与雷达的相对运动,回波信号在方位方向上会发生扩散。
方位向压缩技术通过运动补偿和相位调控等方法,将不同方向上的回波信号压缩到一个方向上,从而提高方位分辨率。
- 图像合成:合成孔径雷达通过综合多个方向的压缩回波信号,形成一个大的合成孔径,从而获得高分辨率的图像。
与真实孔径雷达距离向分辨率相同。
但由于真实孔径机载雷达一般用短脉冲来实现距离向分辨率,而合成孔径雷达通常用带宽(脉冲频率的变化范围)为B的线性调频脉冲来实现作用距离向的良好分辨率。
c
r2
1
=
=τδ
ground Range resolution
()
pulse length speed of light
2cos2cos depression angle
r
c
R
τ
γ
×
==
Range Resolution (2)
Azimuth resolution
slant range wavelength
antenna length
a S R L
λ
×=×
Synthetic aperture radar (SAR)
Azimuth Resolution (3)
合成孔径雷达影像固有的透视收缩、顶底位移和阴影等几何特征不利于一般用户对影像特征的理解和专题信息的提取。
合成孔径雷达具有比较复杂的成像机制,若用户采用光学遥感影响几何校正中常用的多项式法进行合成孔径雷达影像的校正,很难得到满意的校正结果.
Principle of SAR Image Geocoding
斜距图像地距图像
基于成像模型的SAR影像纠正
• 光学近似模型的SAR几何精确纠正
– 共线方程G.Konecny公式正射纠正
由数字摄影测量学界发展的基于雷达共线方程的方法。
这种方法通常基于简化的雷达成像几何 关系建立SAR共线方程。
– 行中心投影公式正射纠正
• SAR成像模型的SAR几何精确纠正
– R-D模型正射纠正
由SAR图像处理算法及系统开发领域专家提出的基于距离——多普勒(RD)定位模型的方 法,这种算法完成从SAR成像机理出发,和SAR的信号处理过程有机结合,已经成为通常SAR 处理器都具备的标准SAR图像产品生产方法.
– 基于SAR模拟成像的正射纠正
共线方程G.Konecny公式正射纠正
•
处理流程 – – – – – – 根据SAR头文件的星历信息计算卫星轨道数据,并按照坐标变换关系将卫星轨 道坐标、控制点坐标、及DEM数据转换到同一坐标系(椭球割面坐标系)中。
利用控制点坐标像素值与地理坐标值之间的对应关系,组建正射纠正模型。
对正射纠正模型进行线性化,通过采用线角元素分开、岭估计等方法确定正射 模型中的各待定参数值。
依据输出图像的图幅范围,按照指定的输出像元的大小,计算DEM范围内各点 的地理坐标所对应的像素坐标。
利用得到的像素坐标在待纠正中的SAR影像中通过采样(最邻近差值或双线性 差值)求出地面控制点其地理坐标值处所对应的像素灰度值。
正射图像生成。
11
R-D定位模型
• SAR作为一种主动遥感成像方式,可以提供非常精确的传感器到目标 的距离和返回信号的多普勒历史信息,这些信息可以很精确地将卫星 和地表相联系,从而构建SAR定位模型,通过解算定位模型就可以得 到每个像元的地理位置。
• SAR定位模型是采用curlander发展的距离-多普勒(RD)定位模型。
该模 型不仅采用严密的距离方程和多普勒方程,而且建立在地球椭球模型 之上。
• • 该模型已经成为目前所有成功发射卫星SAR的标准定位模型。
各种SAR的影像产品都为采用这种定位模型进行地理编码处理提供了 基本一致的卫星轨道状态数据、距离向方程参数和多普勒方程参数。
原点为地心,其基本平面 为赤道面,X 轴指向春分 点,Z轴和地球的赤道 平面重合。
这个坐标系统通常称为 GEI(Geocentric Equatorial Inertial),广泛 应用于地球轨道上星体 或人造目标的定位)
对于SAR地理定位研究的空间尺度来讲,GEI坐标系统可以认为是静止 的惯性坐标系统。
在GEI系统中,地面上的物体是随着地球自转而运动 着的。
GEI坐标系是描述天体运动的理想坐标系统,但这种惯性坐标系统不适 合描述地面目标的位置。
12
R-D模型
v v v Rst = Rs − Rt f DC = −
距离方程
v v 2 v v (V s − Vt ) ⋅ ( Rs − Rt ) λR
多普勒频率方程
xt2 + y t2 z2 + t2 = 1 ( Re + h) 2 R p
地球模型方程
Re是平均赤道半径, Re=6378.139km
R p = (1 − 1 / f )Re 极半径,
f是平坦度因子, f=298.255
13
地理定位方法——直接定位法
• 对于任意影像像元(i,j),斜距R和多普勒频率是已知的。
因此在距
离方程和多普勒方程中只有目标点的位置是未知的。
• 对于地球数据模型方程,两个椭球参数为已知值,假设目标点的高 程已知,则在地球模型中也只有目标点的坐标是未知数。
• 由影象坐标出发,求解该影像坐标所对应的大地坐标的过程就是直 接定位法。
(i, j , H t ) → tij → ( R, f d ) → ( X t ,Yt , Z t ) GEI → ( X t ,Yt , Z t ) ECR → ( Lt , δ t ) ECR
地面目标的大地坐标是在ECR坐标系中定义的,而卫星状态矢量坐标通常在GEI坐 标系中定义。
因此,要在ECR坐标系中定义以上定位方程,需要将卫星状态矢量 由GEI坐标系转换到ECR中。
• 在星载SAR地理定位中还常用到地固坐标系统(ECR),不考虑极移 的地固系统为准地固坐标系统,考虑极移的地固系统为准地固坐标系 统。
• 准地固坐标系统和瞬时真赤道地心系之间的差别为地球自转角,即格 林尼治恒星时(GHA)。
• 卫星轨道矢量的参考时间通常为UTC,因此在进行GEI与ECR之间的 转换时,需要从UTC推算出GHA。
ECR与GEI坐标系X轴间 的夹角为地球自转角,是 时刻在变化的。
14
地理定位方法——间接定位法
( L t , δ t , H t ) ECR → ( X t , Y t , Z t ) ECR → ( X t , Y t , Z t ) GEI → ( R , f D ) → t ij → ( i , j )
若从地物大地坐标空间出发,同样也可以通过解算定位方程,确定该地物对应的 影像坐标,这种定位方法称为间接定位法。
15
R-D模型正射纠正步骤
SAR影像地理编码的一般过程 直接法:逆时针 间接法:顺时针
16
17
Example ERS-1 ground range image (PRI) in range/azimuth geometry
18
Example ERS-1 geocoded ellipsoid-corrected (GEC) image in map geometry
Example ERS-1 geocoded terrain-corrected (GTC01) image in map geometry, with elevation-induced distortions removed
19
Layover bit extracted from example ERS-1 geocoded terrain-corrected (GTC02) image in map geometry
below.
ERS-1 slant range image ERS-1 Image, geocoded to Swiss map coordinates using DHM25
20
•采集区域平原与山区•采集点位150个
•有效点位1个/10公里
正射校正前正射校正后校正前后效果比较:
1、近SAR地区,距离展开;
2、山坡处,压缩区展开;
近距展开
局部正射纠正后结果(山区
地形得到纠正)
局部原始图像(山区近距离压
缩、透视收缩明显)山坡处,迎SAR 面压缩展开。