卫星或飞船的跟踪测控模型设计
- 格式:pdf
- 大小:353.81 KB
- 文档页数:6
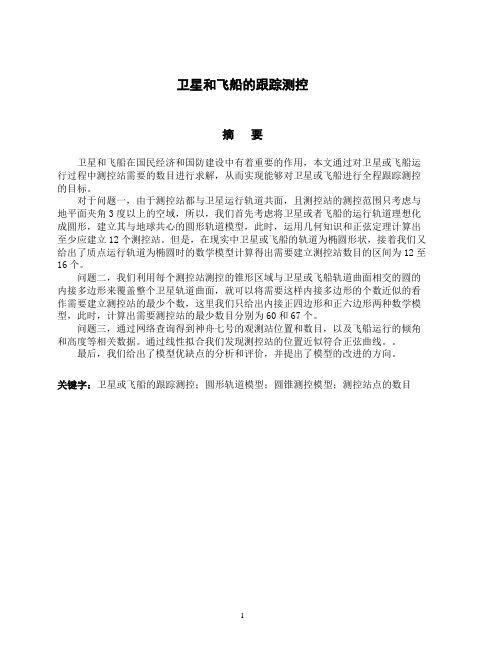
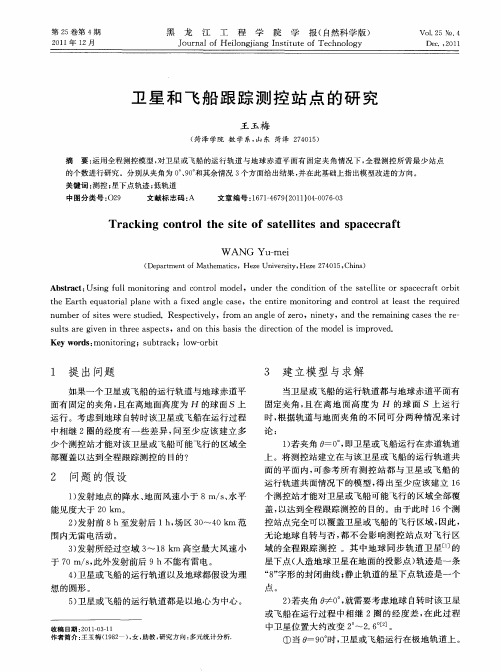
Vol.28No.2Feb.2012赤峰学院学报(自然科学版)Journal of Chifeng University (Natural Science Edition )1问题的提出卫星和飞船在国民经济和国防建设中有着重要的作用,对它们的发射和运行过程进行测控是航天系统的一个重要组成部分,理想的状况是对卫星和飞船(特别是载人飞船)进行全程跟踪测控.测控设备只能观测到所在点切平面以上的空域,且在与地平面夹角3度的范围内测控效果不好,实际上每个测控站的测控范围只考虑与地平面夹角3度以上的空域,在一个卫星或飞船的发射与运行过程中,往往有多个测控站联合完成测控任务,如神州七号飞船发射和运行过程中测控站的分布如图1所示:请利用模型分析卫星或飞船的测控情况,具体问题如下:1.1在所有测控站都与卫星或飞船的运行轨道共面的情况下至少应该建立多少个测控站才能对其进行全程跟踪测控?1.2如果一个卫星或飞船的运行轨道与地球赤道平面有固定的夹角,且在离地面高度为H 的球面S 上运行,考虑到地球自转时该卫星或飞船在运行过程中相继两圈的经度有一些差异,问至少应该建立多少个测控站才能对该卫星或飞船可能飞行的区域全部覆盖以达到全程跟踪测控的目的?1.3收集我国一个卫星或飞船的运行资料和发射时测控站点的分布信息,分析这些测控站点对该卫星所能测控的范围,2问题的分析2.1对题1的分析,由题意可建立直观的平面几何图形(图1),利用已知角α,R ,h 表示出角θ,则2π2θ就为所建的最少测控站个数.2.2对题2的分析,尽管按题目的假设,卫星或飞船的运行轨迹形成了球环区域,且与赤道表面有固定夹角,并在球面上运行.但由于地球有自转,从而地球上的测控站也在运动,由运动的相对性可以将地球看做是静止的,那么球面S 相对地球向相反的方向运动.从而卫星或飞船的运行轨道扫过的区域就是球面S 上的一个球环,即球面S 上下各去掉一个球冠的剩余部分.而每一个测控站能监控到的区域是以测控站为顶点,87度角为半顶角的圆锥体与球环相交得到球面S 上的一个球冠.为了用最少测控站对卫星或飞船可能飞卫星和飞船的跟踪测控王秀琴(集宁师范学院数学系,内蒙古乌兰察布012000)摘要:问题1可化为一个平面几何问题,用简单的计算即可.对于问题2我们做了如下分析:尽管按题目的假设卫星或飞船的运行轨道与地球赤道平面有固定的夹角且在球面S 上运行,但由于地球有自转,从而地球上的测控站也在转动.由于运动是相对的,我们将地球看作是静止的,则球面S 就是以相反的方向作转动,从而卫星或飞船的运行轨道扫过的区域就是球面S 上的一个球环,而球面S 上下各去掉一个球冠的剩余部分,而每一个测控站能监控到的区域是以测控站为顶点,87度为半顶角的一个圆锥体与球环相交得到球面S上的一个球冠,从而问题归结为用尽量少的球冠来覆盖球环的问题.将问题转化为一个空间解析几何问题经复杂的计算得到了每个测控站监测球环的有效测控角,从而可知需要测控站的最少个数.关键词:最小覆盖;有效测控角;球环;球冠中图分类号:V556文献标识码:A 文章编号:1673-260X (2012)02-0138-03图片来源/jrzg/2008-09/24/con -tent_1104882.htm图1第28卷第2期(上)2012年2月138--行的区域全部覆盖达到全程跟踪测控,即问题归结为用尽量少的球冠来覆盖球环的问题.则需要把测控站都建在赤道上,两个相邻的测控站可以分别形成两个测控区域,这两个测控区域相交后可得到两个交点,这两个交点恰好在球环的上下边界处,才能全部覆盖球环区域,以达到全程跟踪测控的目的,即将问题转化为一个空间解析几何问题.由此可以作出图3,经过复杂的计算得到了每个测控站监测球环有效测控角,即平面A'OB'与平面AOB所形成二面角A'B'-O-AB的平面为覬则平面角得二倍就是有效测控的最大范围,可知2π2覬就是所建最少测控站个数.3模型的基本假设与参数说明3.1基本假设(1)卫星或飞船的运行轨道是圆.(2)测控站的选择不受地域等各种因素的限制,由于所求得最少测控站得个数,所以测控站选在赤道上建立.3.2参数说明α:监控站监控视角的一半;θ:测控区域所对地球圆心角的一半;γ:卫星或飞船的运行轨道与地球赤道平面的固定夹角;β:与固定夹角γ互余的角;覬:相邻两个侧空站的有效测控视角的一半h:地球表面到卫星或飞船轨道的高度;R:地球的半径;l:地球表面上一点G到点N的距离;s:卫星或飞船运行轨道上一点M到点N的距离;S:表示卫星或飞船运行的球面;K:表示测控站与卫星或飞船得运行轨道共面时所需测控站的最少个数;K':表示测控站与卫星或飞船得运行轨道共面时所需测控站的个数;P:表示卫星或飞船得运行轨道与地球赤道平面由固定夹角时所需测控站的最少个数;P':表示卫星或飞船得运行轨道与地球赤道平面由固定夹角时所需测控站的个数;4模型的建立与问题的求解4.1对问题1的解答依据题意,有如下平面图:以球心O为圆心,R为半径的圆代表地球,R+h为半径的圆代表卫星或飞船运行的轨迹.根据图3有cosθ=R+LR+h(1)tanα=SL(2)由(2)变形得S=tanα(3)根据勾股定理得(R+h)2=(R+L)2+S2(4)将(3)代入(4)得(R+h)2=(R+h)2+(Ltanα)2(5)由(5)整理得(tanα2+1)L2+2RL-(2RH+h2)=0(6)由(6)解得L=-R±R2+(tan2+1)(2Rh+h2)姨由L≥0得L=-R+R2+(tan2+1)(2Rh+h2)姨(tan2+1)(7)将(7)代入(1)得cosθ=-R+-R+(R+1)2+tan2α(2Rh+h2)姨tan2α+1R+h(8)化解(8)得cosθ=Rtan2α+(R+h)2+tan2α(2Rh+h2)姨(R+h)(tan2α+1)(9)由(9)得,θ=arccos=Rtan2α+(R+h)2+tan2α(2Rh+h2)姨(10)则测控站的最少个数为K'=2π=π(11)当K'为整数时K=K'否则K=[K']+1(2)对问题2的解答以球面S和地球共圆中心为圆心,z轴垂直向上,赤道所在平面为xoy面,建立直角坐标系,则地球表面方程为x2+y2+z2=R2,球环S的方程为x2+y2+z2=(R+h)2,在图4中,AB 所在的球冠为一个测控站覆盖的区域,为此测控站建立在赤道与x轴的交点O'上,A'和B'相邻的两个测控站的交点,并且交点分别在球环的上下边界,C和C'分别为AB和A'B'的中点,则平面ABO和平面A'B'O构成的二面角就是有效测控角的一半,∠COC'为二面角的平面角,以下我们来求此角.由图4得x2+y2=tan2βz2x2+y2+z2=(h+R)姨2(13)解(13)得z2=(h+R)2(14)139--将(14)代入(13)得球环上边界方程;x 2+y 2=tan 2β(h+R)21+tan 2β(15)由图4得x 2+y 2=tan 2α(x-R)2x 2+y 2+z 2=(h+R)2(16)解(16)得,x=Rtan 2α±(h+R)2+tan2αR(2h+R)姨(17)将(17)代入(16)得,y 2+z 2=tan 2αRtan 2α±(h+R)2+tan 2αR(2h+R)姨-姨姨R2(18)由(15)和(18)联立得方程组,x 2+y 2=tan 2β(h+R)2y 2+z 2=tan 2αRtan 2α±(h+R)2+tan 2αR(2h+R)姨tan2α+1-姨姨R2姨姨姨姨姨姨姨姨姨姨姨姨姨(19)化解(19)得,x 2-z 2=tan 2β(h+R)2-tan 2αRtan 2α±(h+R)2+tan 2αR(2h+R)姨tan2α+1-姨姨R2(20)将(14)和(20)联立得z 2=(h+R)2x 2-z 2=tan 2β(h+R)21+tan 2β-tan 2αRtan 2α±(h+R)2+tan 2αR(2h+R)姨tan2α+1-姨姨R 2姨姨姨姨姨姨姨姨姨姨姨姨姨(21)解(21)得A'的坐标为x'=(h+R)2-tan 2α(±(h+R)2+Rtan2α(2h+R)姨-R)2姨y'=tan 2α±(h+R)2+tan 2αR(2h+R)姨-R 姨2-(h+R)21+tan2β姨姨姨姨姨姨姨姨姨姨姨姨姨姨由B'点与B 点关于x 轴对称可得B'(x',y')由C'点是B'点和B 点的中点可得C'(x',y')oc'=x'2+y'2姨由图3得cos γ=ocR+h(22)将(22)变形得oc=(R+h)cos γ即C((R+h)cos γ,0)由此开可以得cos 覬=o 姨c oc 姨姨'|o 姨c ||oc姨姨'|即覬=arccos1-tan 2α(±(h+R)2+Rtan2α(2h+R)姨-R)2(1+tan 2α)2(R+h)2姨所以侧控站最少个数为P'=2π2覬=π覬当P 为整数时P=P'否则P=[P']+1———————————————————参考文献:〔1〕刘承平.数学建模方法[M].北京:高等教育出版社,2002.〔2〕吕林根.解析几何[M].北京:高等教育出版社,2001.140--。
卫星和飞船的跟踪测控摘要卫星和飞船在国民经济和国防建设中有着重要的作用,本文通过对卫星或飞船运行过程中测控站需要的数目进行求解,从而实现能够对卫星或飞船进行全程跟踪测控的目标。
对于问题一,由于测控站都与卫星运行轨道共面,且测控站的测控范围只考虑与地平面夹角3度以上的空域,所以,我们首先考虑将卫星或者飞船的运行轨道理想化成圆形,建立其与地球共心的圆形轨道模型,此时,运用几何知识和正弦定理计算出至少应建立12个测控站。
但是,在现实中卫星或飞船的轨道为椭圆形状,接着我们又给出了质点运行轨道为椭圆时的数学模型计算得出需要建立测控站数目的区间为12至16个。
问题二,我们利用每个测控站测控的锥形区域与卫星或飞船轨道曲面相交的圆的内接多边形来覆盖整个卫星轨道曲面,就可以将需要这样内接多边形的个数近似的看作需要建立测控站的最少个数,这里我们只给出内接正四边形和正六边形两种数学模型,此时,计算出需要测控站的最少数目分别为60和67个。
问题三,通过网络查询得到神舟七号的观测站位置和数目,以及飞船运行的倾角和高度等相关数据。
通过线性拟合我们发现测控站的位置近似符合正弦曲线。
最后,我们给出了模型优缺点的分析和评价,并提出了模型的改进的方向。
关键字:卫星或飞船的跟踪测控;圆形轨道模型;圆锥测控模型;测控站点的数目1、问题重述1.1 背景资料现代航天工业中卫星和飞船的测控设备只能观测到所在点切平面以上的空域,且在与地平面夹角3度的范围内测控效果不好,实际上每个测控站的测控范围只考虑与地平面夹角3度以上的空域。
在一个卫星或飞船的发射与运行过程中,往往有多个测控站联合完成测控任务,因此需要分析卫星或飞船的测控情况。
1.2 需要解决的问题问题一:在所有测控站都与卫星或飞船的运行轨道共面的情况下至少应该建立多少个测控站才能对其进行全程跟踪测控。
问题二:如果一个卫星或飞船的运行轨道与地球赤道平面有固定的夹角,且在离地面高度为H的球面S上运行。

航天飞行器导航与控制系统设计与仿真导语:航天飞行器是现代科技的巅峰之作,它的导航与控制系统是其正常运行和控制的核心。
本文将探讨航天飞行器导航与控制系统的设计原理、关键技术以及仿真模拟的重要性。
一、航天飞行器导航与控制系统设计原理航天飞行器的导航与控制系统设计原理主要包括三个方面,即姿态控制、导航定位和轨迹规划。
1. 姿态控制:姿态控制是指通过控制飞行器的各种运动参数,使其保持稳定的飞行姿态。
对于航天飞行器来说,由于外部环境的复杂性和飞行任务的特殊性,姿态控制尤为重要。
常用的姿态控制方法包括PID控制、模型预测控制和自适应控制等。
2. 导航定位:导航定位是指通过测量飞行器的位置和速度等参数,确定其在空间中的位置。
现代航天飞行器的导航定位通常采用多传感器融合的方式,包括惯性导航系统、卫星定位系统和地面测控系统等。
其中,卫星导航系统如GPS、北斗系统等具有广泛应用。
3. 轨迹规划:轨迹规划是指根据航天飞行器的飞行任务和外部环境的要求,确定其飞行轨迹和航线。
航天飞行器的轨迹规划需要考虑多个因素,如飞行器的运动特性、飞行任务的要求、空间障碍物等。
二、航天飞行器导航与控制系统的关键技术航天飞行器导航与控制系统设计离不开一些关键技术的支撑,其中包括:1. 传感器技术:传感器技术是导航与控制系统的基础,可以通过传感器对飞行器的姿态、速度、位置等进行准确测量。
陀螺仪、加速度计、GPS接收机等传感器设备的精度和稳定性对导航与控制系统的性能有着重要影响。
2. 控制算法:姿态控制和导航定位需要高效的控制算法来实现。
PID控制算法是常用的姿态控制方法,模型预测控制和自适应控制等算法则在一些特殊应用中得到了广泛应用。
对于导航定位,卡尔曼滤波和粒子滤波等算法可以很好地利用多传感器信息进行位置估计。
3. 轨迹规划算法:航天飞行器的轨迹规划需要考虑多个因素,如安全性、能耗等。
基于遗传算法和优化算法的轨迹规划方法可以在不同的约束条件下求解最优解。
卫星和飞船的测控站点设置摘要本文主要针对卫星或飞船作地面测控时, 如何建立较少的测控站以达到全程跟踪测控的目的.当所有测控站都与卫星或飞船的运行轨道共面时,我们在假设了所有测控站的测控能力相同之后,利用初等数学知识即刻解决了测控站的设置问题且得到了一个比较好的结果:取地球半径为km340、=,当卫星或飞船距离地面的高度取kmR6370800、km1000时,设置的测控点的个数分别为12、11、10、8、500、km400、kmkm7.当卫星或飞船的运行轨道与赤道平面有固定夹角且考虑地球自转时,我们给出了两种安置测控点的方法:第一种方法,当卫星在地球表面留下间距较大的投影曲线时,我们在每个曲线的正上方安置测控点,利用投影曲线的间距、投影球带宽和测控站的测控范围之间的关系,在卫星或飞船距离地面的高度和地球赤道面与卫星运行轨道面之间的夹角发生变化时,给出了不同情况下最优的测控点个数(见表2),并且得到了如下结论:当卫星高度一定的情况下,轨道与赤道面的夹角α越大,所需要的地面测控点越大;当轨道与赤道面的夹角α一定的情况下,所需要的地面测控点随高度的增大而减少;第二种方法,当卫星在地球表面留下的投影曲线间距很小时,我们利用投影球带面积与测控站的空间测控区域大小的关系,同样得到了一个最优的结果(见表三).最后我们收集了神舟七号飞船的一些运行资料和发射时测控站的分部信息,并且利用这些信息分析了测控站点所能测控的范围,尤其是得到了陕西渭南测控站的测控面积是62⨯.108.0126km关键词:卫星测控;运行轨道;投影曲线;投影球带面;测控点;测控范围一物理背景及问题重述对卫星和飞船的发射和运行过程进行测控是航天系统的一个重要的组成部分,它主要是通过设置在地面的航天测控网对运载火箭和航天器的飞行轨道、飞行姿态等进行的跟踪和测控,目的是为了实时了解它们的飞行状况,以评价飞行任务的完成情况,及时掌握飞行的安全信息.卫星的地面测控由测控中心和分布在各地的测控台、站(测量船)进行.在卫星与运载火箭分离的一刹那,测控中心要根据各台站实时测得的数据,算出卫星的位置、速度和姿态参数,判断卫星是否入轨.入轨后,测控中心要立即算出其初轨根(参)数,并根据各测控台站发来的遥测数据,判断卫星上各种仪器工作是否正常,以便采取对策.这些工作必须在几分钟内完成.卫星在整个工作过程中,测控中心和各测控台站还有许多繁重的工作要做.其一是不断地对其速度姿态参数进行跟踪测量,不断地精化其轨道根数;其二是对星上仪器的工作状态进行测量、分析和处理;其三是接收卫星发回的科学探测数据;其四是由于受大气阻力、地球形状和日月等天体的影响,卫星轨道会发生振动而离开设计的轨道,因此要不断地对卫星实施轨道修正和管理.因此,地面测控是一件非常重要、非常精细和非常复杂的工作.本文就是要求我们对卫星或飞船地面测控时,如何用较少的测控点测控卫星或飞船且能达到较好测控效果,即飞船飞行的大部分区域能被测控得到.题目首先要求我们在所有测控站都与卫星或飞船的运行轨道共面的情况下,用较少的测控站全程跟踪卫星或飞船;其次,当卫星或飞船的运行轨道与地球赤道平面有固定的夹角,且考虑地球自转的情况下,用较少的测控站全程跟踪卫星或飞船;最后要求我们用已有的卫星或飞船的运行资料和发射时测控站点的分布信息讨论测控站点对卫星或飞船的测控范围.二模型假设为了考虑问题简单起见,我们做如下假设:A:认为地球是一个实心球体;1A:卫星或飞船的运行轨道为圆轨道;2A:卫星或飞船的运行过程不会出现任何故障;3A:每个测控站的所能测控的范围大小是相同的;4A:卫星或飞船的运行轨道不会发生变轨;5A:地球、卫星或飞船在各自运行轨道上为匀速运动;6A:卫星或飞船的运行轨道与赤道平面的夹角视为定值 ;7A:卫星或飞船运行时作为一个质点考虑;8A:在任何地方都可建测控站,不受非科技因素的影响;9A:各个测控站的测控范围大小相同;10A:卫星或飞船在发射过程中是一个匀加速过程.11三问题分析由于测控设备只能观测到所在点切平面以上的空域,且在与地平面夹角3度的范围内测控效果不好,实际上每个测控站的测控范围只考虑与地平面夹角3度以上的空域,所以某一个测控点A的测控范围就是一个锥面的内部,(如下图)度角地球A图1当卫星进入阴影区域的上方时,就可以被我们测控到,否则我们测控不到卫星.对于第一个问题,当所有测控站与卫星或飞船的运行轨道共面时,我们只需要考虑用多少个这样的锥型监控设备(由于测控站和卫星共面,也可以说三角形监控设备)可以把卫星的整个飞行轨道覆盖(如下图).卫星轨道地球图2对于第二个问题,既然轨道面和地球赤道面有一定的夹角,而且要考虑地球自转,所以,在地面测控时,我们看到的卫星运行轨线不在一个平面上(如下图,图片来源于文献[1]),图3因此不能用解决第一个问题的方法去设置测控点.我们想在卫星轨道线下方的的地面上布置测控点,这样的话我们可以完成对卫星的全程测控.对于第三个问题,我们主要利用各种手段去搜索飞船的运行资料和发射时测控站点的分布信息,然后由这些信息考察测控点对卫星或飞船的测控范围.四符号说明R:地球半径的平均值;M:地球的质量;m:卫星或飞船的质量;m:地球表面某物体的质量;1g:地球的重力加速度;h:测控站与卫星运行轨道共面时,卫星的离地高度;H:卫星运行轨道与赤道平面有夹角时,卫星离地高度;:某测控站的测控范围所对应弧的圆心角;1n :测控站与卫星的运行轨道共面时,至少要建立的测控站的站点数;2n :卫星的运行轨道与赤道平面有固定夹角时,至少要建立的测控站的站点数;T :某卫星运行一圈的时间;j ∆:卫星从A 点正上方沿轨道运行,时间T 后到达B 的正上方,则j ∆表示A 、B 两点的经度差;l :卫星从A 点正上方沿轨道运行,时间T 后到达同纬度B 的正上方,则l 表示A 、B 两点的纬线长;1ω:地球自转的角速度;2ω:某卫星的角速度; ω:A 地所在的纬度;2v :某卫星的线速度;φ:地面测控站的测控范围; d :卫星运行轨道的轨道数; S :卫星运行轨道所在的球面.五 问题一的模型建立与求解5.1 问题一模型的建立如图1所示,假设考虑每个测控站的测控范围与地平面夹角为 3以上的空域,求出测控范围所对应弧在半径为h R +时的圆心角θβ2=(如图),而整个运行轨道的圆心角是360,这样就得到测控站点的站点数.根据问题分析和下图,图4 再由正弦定理,我们可以得到如下表达式)218087sin(18093sin βππ-=+RR h , 如果π2除以β的商是整数,则βπ21=n ;如果π2除以β的商不是整数,则1]2[1+=βπn .5.2 问题一的模型求解对于上述模型取km R 6370=,然后给h 取不同的数值,得到了对应情况下的测控站点的个数.见下表h 1nkm 340 12 km 400 11 km 500 10 km 800 8 km 1000 7测控设备5.3、问题一模型的结果分析由上表我们很清楚的看到,当卫星高度升高的时候,所需要的地面测控站的个数随卫星高度的变大而减小.上述结论是合理的,这是因为地面测控设备的形状呈倒锥型,当卫星高度升高,测控设备的监测范围变大,此时所需要的测控点个数减少.六问题二模型的建立与求解6.1问题二模型的建立在本节中,我们设卫星轨道面与赤道面的夹角为 .针对问题二建立一个相对简单的模型.首先给一个名词以准确的定义定义1 正上方:给定一个球面'S上的一点A,称球面'S在A点的外法向量上的任意一点为点A的正上方.增加假设:A:假设赤道面方向是水平方向(如下图).12图5由于地球自西向东自转,当卫星或飞船从地球上的某一点A的正上方沿轨道运行时间T后,一定回不到A的正上方,即卫星一定回到A的左侧且与A同纬度的B点,正是由于这个原因,才形成了图3.现在我们给一个比较简单、特殊的模型:既然卫星在运行时间T后回不到A点,我们假设地球自转一周后(卫星运行几周后)卫星也刚好回到A点, 此时卫星轨道线在地球上的投影如图3.很显然,卫星在地球自转第二周的时候在地球上的投影轨线和第一周重合,即为图3下面我们计算在这种情况下测控站的个数.vStep1 由[5,P54]求出卫星的线速度2H R g R v R GMm g m H R GMmH R mv +=⇒⎪⎪⎩⎪⎪⎨⎧=+=+2211222)( Step2 计算出卫星运行一周所用的时间T222222)(22)(v H R T HR v H R v +==⇒+=⇒+=πωπωωStep3 若卫星在纬度为ω的A 地开始飞行,那么它经过一圈之后到达A 地的西边B 地,两地在同一纬度上,求两地之间的经度差j ∆11144006060242ωππω•=∆=⨯⨯=T jStep4 计算地面测控站的测控范围即蓝色测控设备的测控范围,示意图如图2图6平面示意图如下:即计算下图 弧CEF 的长度C图 7由初等几何知识可以知道弧CEF 的长度))18093sin arcsin(18032()(2πππφH R R H R +--•+=Step5 计算出卫星的轨道数d :在计算卫星的轨道数时,只需要用π2 除以经度差即: 如果π2除以经度差是整数,则:jd ∆=π2; 如果π2除以经度差不是整数,则)1]([2+∆=jd π.Step6 计算测控站的站点数2n在计算测控站的时候,我们要充分考虑轨道与赤道面得夹角α,当α固定时,轨道面是固定的,现在我们过轨道面的最高点和最低点作球面S 的截面,这样卫星的运行只在弧长为dk 的球带上运动. 因此我们只需要在球带对应的地球面上安排测控点,这样可以减少我们测控点的个数.S图8此时, α)(2H Rdk +=实际上我们在安排测控点的时候用的dk 的长度要小一些,这是因为:图9我们没有必要在球带边界对应的地面上安排测控点,只需要在离边界距离约为2φ的地方设置即可(如上图),这样实际我们需要的球带弧长为φ-dk (当φ<dk 时,我们安排一个测控点就可以了),所以⎪⎩⎪⎨⎧<≥+-+=φφφφαdk d dk H R d n ,,)1])(2([2,)(6.2 问题二模型的求解与分析我们对卫星距离地面高度H 和轨道面与赤道面的夹角α依次取值并用计算模拟(程序见附录)[6,P23],得到了如下结果:表2αH 100π 50π10π 6π 4π 3π 52π 243 16 16 16 32 48 64 81 343 16 16 16 16 32 47 63 443 16 16 15 15 31 46 62 600 15 15 15 15 30 30 45 800 14 14 14 14 14 28 29 1000141414 14 14 27 27从表数据可以看出,当卫星高度一定的情况下,轨道与赤道面的夹角α越大,所需要的地面测控点越大;当轨道与赤道面的夹角α一定的情况下,所需要的地面测控点随高度的增大而减少.因此,我们的结果是合理的.但是,我们的模型具有一定的特殊性,即我们要求了地球自转一周后(卫星运行几周后)卫星也刚好回到A 点,换句话来讲,在地球上某些点的正上方没有卫星经过,并且这样的区域面积还是比较大的.而我们发射卫星是想让卫星尽可能多的扫面地面区域,因此这违背了发射卫星的初衷.下面对我们的模型做一下修改.6.3 问题二模型的改进本节我们不再假设地球自转一周后(卫星运行几周后)卫星回到A 点,此时,虽然卫星轨道在地球上的投影轨线之间有一定的空隙,但是很密集的分布于地球表面(如图).图10我们可以假设密集轨线在地球表面投影之后形成一个球带曲面.下面我们只需要考虑如何设置测控站是得这些站点能够把投影球带面全部覆盖.当2βα≤时,问题与5.1一样,这里不再赘述.当2βα>时,我们计算图8中球带的有效表面积,即同理于step6中的分析,我们没有必要计算整个球带表面积,只需要计算圆心角为βα-2的球带面积,注意到球面S 的半径为H R +,利用文献[2,P304]中知识,球带的有效表面积)2sin()(42βαπ-+=H R S d又因为图7 中球冠CEFD 的表面积为)2cos 1)((2βπ-+=H R S g所以我们可以求出能覆盖有效球带的测控设备的个数为:1][2+=gdS S n6.4问题二修改模型求解与分析我们对卫星距离地面高度H 和轨道面与赤道面的夹角α依次取值并用计算模拟,得到了如下结果:注:表中出现的“/”表示在此处,2α≤.从表数据可以看出,当卫星高度一定的情况下,轨道与赤道面的夹角α越大,所需要的地面测控点越大;当轨道与赤道面的夹角α一定的情况下,所需要的地面测控点随高度的增大而减少.因此相对来讲还是比较合理的,但是我们也看到用上述方法得到的数据是比较粗糙的,不够精确,我们也有必要提出模型的改进方向.6.5 模型的进一步改进方向我们上述模型总的来讲是比较合理的,但是由于地面站点数量的限制,使得卫星或飞船的飞行过程不能被全程测控,比如“神七”有多个时间段不能被测控,这就要求我们设置地面站的时候要进行精心选择,努力保证飞行的安全可靠.因此这也是我们的模型需要有改进的地方.① 在第6.1节中,我们可以考虑不在卫星轨道正下方,而考虑在相交轨道投影线的交点上设置测控站,我们认为这样得到得结果是比较合理且是较优的.② 若以赤道面所在的面作为xoy 平面,以地球球心为坐标中心建立空间直角坐标系,则球面方程为R zyx2222=++由[7, P66]卫星轨道方程为⎪⎩⎪⎨⎧=+=++++)()R (22222cos sin H R H z y x z y αα 其中α为赤道面和卫星轨道面的夹角.有上述两个方程,根据地球自转和卫星运行,我们可以画出卫星飞行时在地球面上的形成的网格,进而可以把这些网格映射到球面S 上,这样我们可以计算出每条网格线的长度和网格线的结点坐标,进而可以确定地面测控站的位置, 这是我们将来努力的方向.七 问题三的求解本节中,我们在网上主要搜集了神舟7号飞船的运行资料以及发射时测控站点的分布信息.发射时各测控点的分布信息如下表,其中各个地面站点的经纬度来源于[3], 发射时远望号的位置信息来源于[4].另外我们通过[4]搜索到了“神七”发射过程中测控站的一些信息,如下图就是一个地面测控站的测控范围示意图,利用该图,我们可以大概了解测控站的测控范围.进一步通过[8]我们还了解到,神舟七号的发射时间是2008年9月25日21点10分04秒988毫秒,发射的方向角为 4.42,经过178秒山西吕梁(E111,N37.5)测控站捕捉到飞船,且东风站仍然跟踪正常,第189秒陕西渭南测控站捕捉到飞船;另外,我们还获得了渭南失去飞船信号的时刻,以及飞船的运行速度,运行高度等资料.由上述信息, 我们至少可以知道陕西渭南站的测控范围.结合 6.1节中的step4,经计算,我们得到渭南站的测控区域的空间面积是62.8km.012610八参考文献[1] 徐莹,张有广,林明森,卫星高度计轨道设计的因素分析,《遥感技术与应用》,24(2)155-163,2009.[2]华东师范大学数学系,数学分析,北京,高等教育出版社,2001.[3]网友,中国城市经纬度查, /1034/1039/2004531-20027.html,2009-09-11.[4]霍柯,“神七”测控系统完成全部联试联调, /video/ 2008-09/24/content_10103463.htm,2009-09-11.[5]程守洙,江之水,普通物理学1(第五版),北京:高等教育出版社,1998.[6]萧树铁,大学数学数学实验,北京,高等教育出版社,2003[7]马国强,贾兴琴,空间解析几何,河南,河南大学出版社,1995.[8]火鸟,直播神7发射全过程,/v_show/id_XNDQzMzIxNDA=.html,2009-09-11.附录:format longR=6370000;H=242000;w=pi/100;for i=1:800T=2*pi*(R+H)/R*sqrt((R+H*1000)/9.8); %卫星的周期c=2*pi/(24*3600); %地球的角速度d=T*c; %A,B间经度差s=d*(R+H*1000)*cos(w) ; %纬度为w的卫星上空相邻两周之间的距离(弧长)e=sin(93*pi/180);x=asin(e*R/(R+H*1000));huchang=2*(R+H*1000)*(pi/2-(3*pi/180)-x); %监控范围daoshu=2*pi/d; %卫星轨道数for j=2:0.5:100a=pi/j;%轨道倾斜角daikuan=(R+H)*a*2;%卫星运行上下带宽if meidaogeshu=daikuan/huchang>=1 %每个轨道对应的地面上放置的监测点数pp=(floor((daikuan-huchang)/huchang)+1)*daoshuelsepp=daoshuendendend。