卫星和飞船运行时的跟踪测控(高教社杯数学建模大赛获奖论文)
- 格式:doc
- 大小:130.88 KB
- 文档页数:4

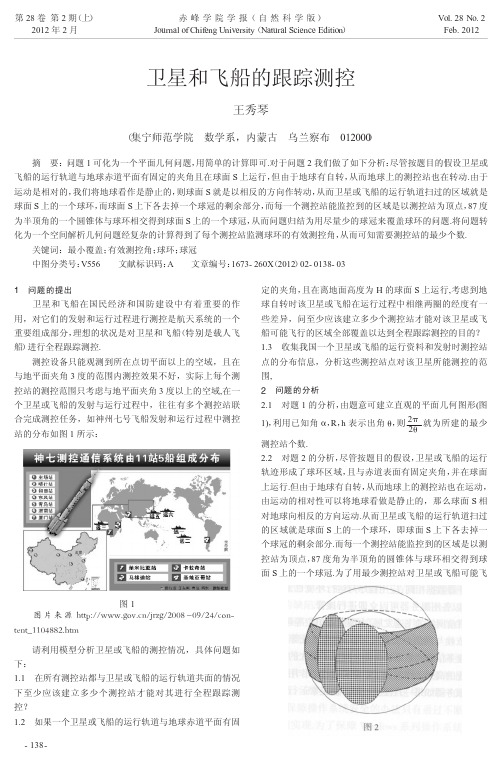
Vol.28No.2Feb.2012赤峰学院学报(自然科学版)Journal of Chifeng University (Natural Science Edition )1问题的提出卫星和飞船在国民经济和国防建设中有着重要的作用,对它们的发射和运行过程进行测控是航天系统的一个重要组成部分,理想的状况是对卫星和飞船(特别是载人飞船)进行全程跟踪测控.测控设备只能观测到所在点切平面以上的空域,且在与地平面夹角3度的范围内测控效果不好,实际上每个测控站的测控范围只考虑与地平面夹角3度以上的空域,在一个卫星或飞船的发射与运行过程中,往往有多个测控站联合完成测控任务,如神州七号飞船发射和运行过程中测控站的分布如图1所示:请利用模型分析卫星或飞船的测控情况,具体问题如下:1.1在所有测控站都与卫星或飞船的运行轨道共面的情况下至少应该建立多少个测控站才能对其进行全程跟踪测控?1.2如果一个卫星或飞船的运行轨道与地球赤道平面有固定的夹角,且在离地面高度为H 的球面S 上运行,考虑到地球自转时该卫星或飞船在运行过程中相继两圈的经度有一些差异,问至少应该建立多少个测控站才能对该卫星或飞船可能飞行的区域全部覆盖以达到全程跟踪测控的目的?1.3收集我国一个卫星或飞船的运行资料和发射时测控站点的分布信息,分析这些测控站点对该卫星所能测控的范围,2问题的分析2.1对题1的分析,由题意可建立直观的平面几何图形(图1),利用已知角α,R ,h 表示出角θ,则2π2θ就为所建的最少测控站个数.2.2对题2的分析,尽管按题目的假设,卫星或飞船的运行轨迹形成了球环区域,且与赤道表面有固定夹角,并在球面上运行.但由于地球有自转,从而地球上的测控站也在运动,由运动的相对性可以将地球看做是静止的,那么球面S 相对地球向相反的方向运动.从而卫星或飞船的运行轨道扫过的区域就是球面S 上的一个球环,即球面S 上下各去掉一个球冠的剩余部分.而每一个测控站能监控到的区域是以测控站为顶点,87度角为半顶角的圆锥体与球环相交得到球面S 上的一个球冠.为了用最少测控站对卫星或飞船可能飞卫星和飞船的跟踪测控王秀琴(集宁师范学院数学系,内蒙古乌兰察布012000)摘要:问题1可化为一个平面几何问题,用简单的计算即可.对于问题2我们做了如下分析:尽管按题目的假设卫星或飞船的运行轨道与地球赤道平面有固定的夹角且在球面S 上运行,但由于地球有自转,从而地球上的测控站也在转动.由于运动是相对的,我们将地球看作是静止的,则球面S 就是以相反的方向作转动,从而卫星或飞船的运行轨道扫过的区域就是球面S 上的一个球环,而球面S 上下各去掉一个球冠的剩余部分,而每一个测控站能监控到的区域是以测控站为顶点,87度为半顶角的一个圆锥体与球环相交得到球面S上的一个球冠,从而问题归结为用尽量少的球冠来覆盖球环的问题.将问题转化为一个空间解析几何问题经复杂的计算得到了每个测控站监测球环的有效测控角,从而可知需要测控站的最少个数.关键词:最小覆盖;有效测控角;球环;球冠中图分类号:V556文献标识码:A 文章编号:1673-260X (2012)02-0138-03图片来源/jrzg/2008-09/24/con -tent_1104882.htm图1第28卷第2期(上)2012年2月138--行的区域全部覆盖达到全程跟踪测控,即问题归结为用尽量少的球冠来覆盖球环的问题.则需要把测控站都建在赤道上,两个相邻的测控站可以分别形成两个测控区域,这两个测控区域相交后可得到两个交点,这两个交点恰好在球环的上下边界处,才能全部覆盖球环区域,以达到全程跟踪测控的目的,即将问题转化为一个空间解析几何问题.由此可以作出图3,经过复杂的计算得到了每个测控站监测球环有效测控角,即平面A'OB'与平面AOB所形成二面角A'B'-O-AB的平面为覬则平面角得二倍就是有效测控的最大范围,可知2π2覬就是所建最少测控站个数.3模型的基本假设与参数说明3.1基本假设(1)卫星或飞船的运行轨道是圆.(2)测控站的选择不受地域等各种因素的限制,由于所求得最少测控站得个数,所以测控站选在赤道上建立.3.2参数说明α:监控站监控视角的一半;θ:测控区域所对地球圆心角的一半;γ:卫星或飞船的运行轨道与地球赤道平面的固定夹角;β:与固定夹角γ互余的角;覬:相邻两个侧空站的有效测控视角的一半h:地球表面到卫星或飞船轨道的高度;R:地球的半径;l:地球表面上一点G到点N的距离;s:卫星或飞船运行轨道上一点M到点N的距离;S:表示卫星或飞船运行的球面;K:表示测控站与卫星或飞船得运行轨道共面时所需测控站的最少个数;K':表示测控站与卫星或飞船得运行轨道共面时所需测控站的个数;P:表示卫星或飞船得运行轨道与地球赤道平面由固定夹角时所需测控站的最少个数;P':表示卫星或飞船得运行轨道与地球赤道平面由固定夹角时所需测控站的个数;4模型的建立与问题的求解4.1对问题1的解答依据题意,有如下平面图:以球心O为圆心,R为半径的圆代表地球,R+h为半径的圆代表卫星或飞船运行的轨迹.根据图3有cosθ=R+LR+h(1)tanα=SL(2)由(2)变形得S=tanα(3)根据勾股定理得(R+h)2=(R+L)2+S2(4)将(3)代入(4)得(R+h)2=(R+h)2+(Ltanα)2(5)由(5)整理得(tanα2+1)L2+2RL-(2RH+h2)=0(6)由(6)解得L=-R±R2+(tan2+1)(2Rh+h2)姨由L≥0得L=-R+R2+(tan2+1)(2Rh+h2)姨(tan2+1)(7)将(7)代入(1)得cosθ=-R+-R+(R+1)2+tan2α(2Rh+h2)姨tan2α+1R+h(8)化解(8)得cosθ=Rtan2α+(R+h)2+tan2α(2Rh+h2)姨(R+h)(tan2α+1)(9)由(9)得,θ=arccos=Rtan2α+(R+h)2+tan2α(2Rh+h2)姨(10)则测控站的最少个数为K'=2π=π(11)当K'为整数时K=K'否则K=[K']+1(2)对问题2的解答以球面S和地球共圆中心为圆心,z轴垂直向上,赤道所在平面为xoy面,建立直角坐标系,则地球表面方程为x2+y2+z2=R2,球环S的方程为x2+y2+z2=(R+h)2,在图4中,AB 所在的球冠为一个测控站覆盖的区域,为此测控站建立在赤道与x轴的交点O'上,A'和B'相邻的两个测控站的交点,并且交点分别在球环的上下边界,C和C'分别为AB和A'B'的中点,则平面ABO和平面A'B'O构成的二面角就是有效测控角的一半,∠COC'为二面角的平面角,以下我们来求此角.由图4得x2+y2=tan2βz2x2+y2+z2=(h+R)姨2(13)解(13)得z2=(h+R)2(14)139--将(14)代入(13)得球环上边界方程;x 2+y 2=tan 2β(h+R)21+tan 2β(15)由图4得x 2+y 2=tan 2α(x-R)2x 2+y 2+z 2=(h+R)2(16)解(16)得,x=Rtan 2α±(h+R)2+tan2αR(2h+R)姨(17)将(17)代入(16)得,y 2+z 2=tan 2αRtan 2α±(h+R)2+tan 2αR(2h+R)姨-姨姨R2(18)由(15)和(18)联立得方程组,x 2+y 2=tan 2β(h+R)2y 2+z 2=tan 2αRtan 2α±(h+R)2+tan 2αR(2h+R)姨tan2α+1-姨姨R2姨姨姨姨姨姨姨姨姨姨姨姨姨(19)化解(19)得,x 2-z 2=tan 2β(h+R)2-tan 2αRtan 2α±(h+R)2+tan 2αR(2h+R)姨tan2α+1-姨姨R2(20)将(14)和(20)联立得z 2=(h+R)2x 2-z 2=tan 2β(h+R)21+tan 2β-tan 2αRtan 2α±(h+R)2+tan 2αR(2h+R)姨tan2α+1-姨姨R 2姨姨姨姨姨姨姨姨姨姨姨姨姨(21)解(21)得A'的坐标为x'=(h+R)2-tan 2α(±(h+R)2+Rtan2α(2h+R)姨-R)2姨y'=tan 2α±(h+R)2+tan 2αR(2h+R)姨-R 姨2-(h+R)21+tan2β姨姨姨姨姨姨姨姨姨姨姨姨姨姨由B'点与B 点关于x 轴对称可得B'(x',y')由C'点是B'点和B 点的中点可得C'(x',y')oc'=x'2+y'2姨由图3得cos γ=ocR+h(22)将(22)变形得oc=(R+h)cos γ即C((R+h)cos γ,0)由此开可以得cos 覬=o 姨c oc 姨姨'|o 姨c ||oc姨姨'|即覬=arccos1-tan 2α(±(h+R)2+Rtan2α(2h+R)姨-R)2(1+tan 2α)2(R+h)2姨所以侧控站最少个数为P'=2π2覬=π覬当P 为整数时P=P'否则P=[P']+1———————————————————参考文献:〔1〕刘承平.数学建模方法[M].北京:高等教育出版社,2002.〔2〕吕林根.解析几何[M].北京:高等教育出版社,2001.140--。
卫星和飞船的跟踪测控摘要卫星和飞船在国民经济和国防建设中有着重要的作用,本文通过对卫星或飞船运行过程中测控站需要的数目进行求解,从而实现能够对卫星或飞船进行全程跟踪测控的目标。
对于问题一,由于测控站都与卫星运行轨道共面,且测控站的测控范围只考虑与地平面夹角3度以上的空域,所以,我们首先考虑将卫星或者飞船的运行轨道理想化成圆形,建立其与地球共心的圆形轨道模型,此时,运用几何知识和正弦定理计算出至少应建立12个测控站。
但是,在现实中卫星或飞船的轨道为椭圆形状,接着我们又给出了质点运行轨道为椭圆时的数学模型计算得出需要建立测控站数目的区间为12至16个。
问题二,我们利用每个测控站测控的锥形区域与卫星或飞船轨道曲面相交的圆的内接多边形来覆盖整个卫星轨道曲面,就可以将需要这样内接多边形的个数近似的看作需要建立测控站的最少个数,这里我们只给出内接正四边形和正六边形两种数学模型,此时,计算出需要测控站的最少数目分别为60和67个。
问题三,通过网络查询得到神舟七号的观测站位置和数目,以及飞船运行的倾角和高度等相关数据。
通过线性拟合我们发现测控站的位置近似符合正弦曲线。
最后,我们给出了模型优缺点的分析和评价,并提出了模型的改进的方向。
关键字:卫星或飞船的跟踪测控;圆形轨道模型;圆锥测控模型;测控站点的数目1、问题重述1.1 背景资料现代航天工业中卫星和飞船的测控设备只能观测到所在点切平面以上的空域,且在与地平面夹角3度的范围内测控效果不好,实际上每个测控站的测控范围只考虑与地平面夹角3度以上的空域。
在一个卫星或飞船的发射与运行过程中,往往有多个测控站联合完成测控任务,因此需要分析卫星或飞船的测控情况。
1.2 需要解决的问题问题一:在所有测控站都与卫星或飞船的运行轨道共面的情况下至少应该建立多少个测控站才能对其进行全程跟踪测控。
问题二:如果一个卫星或飞船的运行轨道与地球赤道平面有固定的夹角,且在离地面高度为H的球面S上运行。

卫星和飞船的跟踪测控摘要本文对问题中各种情况下应建立的测控站个数进行了模型构建、并采集资料,并分析了资料中所建测控站对卫星所能测控的范围。
首先,通过对文章仔细分析、并查阅相关资料和合理的假设,给所分析的问题提供了思路及依据,进而得到明确的答案和相关模型。
对于第一问,在所有测控站都与卫星或飞船的运行轨道共面的情况下,我们想到使卫星或飞船飞的尽可能高,这样测控站测控范围就越大,测控站就越少,通过画图及正弦定理求出测控最大视角,再用︒360除以测控最大视角,可得至少应建立的测控站个数,用MATLAB 软件算得20个。
由于第二问中,卫星围绕地球转的同时,地球也再自转,卫星运行过程中并存在有经度差异,故此题过于复杂,我们对过程采用分解后再结合的方法,先假设地球不自转而卫星旋转,据画图及正弦定理可得测控最大视角2β。
在地球自转同时卫星也转动的时候,在卫星运转一周时间内,地球所在卫星旋转轨道平面内所走的距离可求得:t V C 11=。
通过画图分析得两个测控站的距离:︒=90βπR l 。
则由于地球自转而引起测控站多余的数目为:βπηR t V l C 1190︒=='。
卫星旋转w 周时其最大经度差为2π,由以上推论在同一纬度上增加的测控站个数βπβπη=='''22;则总的测控站数目为: H R R +︒-︒︒=93sin arcsin 8790η(R Vt πλcos 2-)(HR R s i i n +︒-︒+93arcsin 871π) 在问题三中,我们通过查阅相关资料,并从中获得了有关神七运行的基本信息,通过对上述所建模型进行检验,得出的测控站的位置以及所测控的范围与实际情况基本吻合。
关键词:卫星、运行轨道、地球自转、经度差、测控站一、问题重述卫星和飞船在国民经济和国防建设中有着重要的作用,对它们的发射和运行过程进行测控是航天系统的一个重要组成部分,理想的状况是对卫星和飞船(特别是载人飞船)进行全程跟踪测控。
2009高教社杯全国大学生数学建模竞赛编号专用页赛区评阅编号(由赛区组委会评阅前进行编号):赛区评阅记录(可供赛区评阅时使用):评阅人评分备注全国统一编号(由赛区组委会送交全国前编号):全国评阅编号(由全国组委会评阅前进行编号):卫星和飞船的跟踪测试摘要卫星和飞船对国民经济和国民建设有重要的意义,对卫星的发射和运行测控是航天系统的重要部分,理想状况下是对其进行全程跟踪测控。
本文通过建立空间直角坐标系,得到了卫星或飞船飞行的参数方程,并利用Matlab软件模拟出卫星飞行的轨迹图,借助图形,对卫星和飞船的跟踪测控问题进行建模,得到了在不同情况下对卫星或飞船进行全程跟踪测控所需建立测控站数目的一般方法。
问题1:在所有测控站都与卫星或飞船的运行轨道共面的情况下,采用CAD制图法和解析三角形两种方法,分别计算出在所有测控站都与卫星或飞船运行轨道共面的情况下至少应建立12个测控站才能对其进行全程跟踪测控。
问题2:通过建立空间直角坐标系,给出卫星或飞船的运行轨道的参数方程。
同时,验证了其运行轨道在地球上的投影轨迹为一关于赤道平面对称的环形带状区域。
最后,给出对卫星或飞船可能飞行区域进行全部覆盖所需建立测控站的模型。
问题3:对于陆地上的观测点,通过对“神舟七号飞船”相关信息查询,进行几何角度的和长度计算,得出观测点能观测到的区域约为s,再计算出飞船可能飞行的面积,通过进一步的优化与计算得出陆地上的观测点能观测的区域为18.67%.关键词:轨道星下点测控点相对运动优化一、问题重述卫星和飞船对国民经济和国民建设有重要的意义,对卫星的发射和运行测控是航天系统的重要部分,理想状况下是对其进行全程跟踪测控。
测控设备只能观测到所在点切平面以上的空域,实际上每个测控站的范围只考虑与地面成3度以上的空域。
往往要有很多个测控站联合测控任务。
问题1:在所有测控站都与卫星或飞船的运行轨道共面的情况下至少应建立多少个测控站才能对其进行全程跟踪测控?问题2:如果一个卫星或飞船的运行与地球赤道有固定的夹角,且在离地面为H的球面S上进行。
2009高教社杯全国大学生数学建模竞赛题目A题制动器试验台的控制方法分析汽车的行车制动器(以下简称制动器)联接在车轮上,它的作用是在行驶时使车辆减速或者停止。
制动器的设计是车辆设计中最重要的环节之一,直接影响着人身和车辆的安全。
为了检验设计的优劣,必须进行相应的测试。
在道路上测试实际车辆制动器的过程称为路试,其方法为:车辆在指定路面上加速到指定的速度;断开发动机的输出,让车辆依惯性继续运动;以恒定的力踏下制动踏板,使车辆完全停止下来或车速降到某数值以下;在这一过程中,检测制动减速度等指标。
假设路试时轮胎与地面的摩擦力为无穷大,因此轮胎与地面无滑动。
为了检测制动器的综合性能,需要在各种不同情况下进行大量路试。
但是,车辆设计阶段无法路试,只能在专门的制动器试验台上对所设计的路试进行模拟试验。
模拟试验的原则是试验台上制动器的制动过程与路试车辆上制动器的制动过程尽可能一致。
通常试验台仅安装、试验单轮制动器,而不是同时试验全车所有车轮的制动器。
制动器试验台一般由安装了飞轮组的主轴、驱动主轴旋转的电动机、底座、施加制动的辅助装置以及测量和控制系统等组成。
被试验的制动器安装在主轴的一端,当制动器工作时会使主轴减速。
试验台工作时,电动机拖动主轴和飞轮旋转,达到与设定的车速相当的转速(模拟实验中,可认为主轴的角速度与车轮的角速度始终一致)后电动机断电同时施加制动,当满足设定的结束条件时就称为完成一次制动。
路试车辆的指定车轮在制动时承受载荷。
将这个载荷在车辆平动时具有的能量(忽略车轮自身转动具有的能量)等效地转化为试验台上飞轮和主轴等机构转动时具有的能量,与此能量相应的转动惯量(以下转动惯量简称为惯量)在本题中称为等效的转动惯量。
试验台上的主轴等不可拆卸机构的惯量称为基础惯量。
飞轮组由若干个飞轮组成,使用时根据需要选择几个飞轮固定到主轴上,这些飞轮的惯量之和再加上基础惯量称为机械惯量。
例如,假设有4个飞轮,其单个惯量分别是:10、20、40、80 kg·m2,基础惯量为10 kg·m2,则可以组成10,20,30,…,160 kg·m2的16种数值的机械惯量。
卫星或飞船的全程跟踪测控建模
(海南软件职业技术学院07级计算机网络技术专业 某生)
原题:(来自09年高教社杯数学建模大赛乙组赛题,有所改动。
)
卫星和飞船在国民经济和国防建设中有着重要的作用,对它们的发射和运行过程进行测控是航天系统的一个重要组成部分,理想的状况是对卫星和飞船(特别是载人飞船)进行全程跟踪测控。
而测控设备只能观测到所在点切平面以上的空域,且在与地平面夹角3度的范围内测控效果不
好,实际上每个测控站的测控范围只考虑与地平面夹角3度以上的空域。
请利用模型分析:如果一个卫星或飞船的运行轨道与地球赤道平面有固定的夹角a ,且在离地面高度为H 的球面S 上运行。
那么,至少应该建立多少个测控站才能对该卫星或飞船可能飞行的区域
全部覆盖以达到全程跟踪测控的目的?
问题分析:
由于测控设备只观测与地平面夹角3度以上的空域,显然测控设备观测的空间是个圆锥形空域。
圆锥的顶角是固定不变的,其底面大小随圆锥的高(卫星轨道高H )变化。
又由于卫星或飞船的运行轨道与地球赤道平面有固定的夹角a ,而且由于地球自转时该卫星或飞船在飞行过程中相继两圈的经度有所变化,这就会导致卫星或飞船的运行轨迹在地球表面的投影将会覆盖北纬a →赤道→南纬a 之间的带状区域如图1。
特别地,当a=0的时候卫星或飞船的轨道和赤道共面。
当a=π/2的时候卫星的投影将会是整个地球表面。
显然夹角a 决定着卫星运行空域在地球表面的总投影区域。
所以最终可把需要求的变量用关于H 和a 的函数表示出来。
图1 卫星正常运行时的示意图 图2 地球和测控区域等在卫星轨道上的截面图
对模中的变量之间的函数关系进行整理。
1.测控点所观测空域在地球表面上的投影区域内的最长测地线L 的计算函数。
如图2,R 是地球半径,外圆是高为H 的卫星运的运行轨道,灰白色部分为测控站J 的盲区,虚线是过测控点的地面切线,L 是测控站J 所观测区域在地球表面上的投影的最长测地线。
卫星轨道与J 的观测临界面交于A 点,在△AJO 中:JO=R,AO=R+H,∠AJO=
π60
61
,解三角函数可得:6060cos arccos ππ-⎪⎭⎫
⎝⎛+=∠H
R R
AOJ 。
弧L 对应的圆心角为2∠AOJ ,于是有:R AOJ L ⋅∠=2
⎪⎪⎭⎫ ⎝
⎛-⎪⎭⎫ ⎝⎛+=⇒6060cos arccos 2ππH R R
R L (1) 2.当卫星或飞船轨道与赤道夹角固定时卫星轨道在地球表面上的投影带的宽度d 关于a 的函数。
d 是2a 对应的弧长,弧半径为地球半径R ,即得:
d=2aR (2)
3.测控模型中要用到多个测控点分布在同一纬线的情况,为了方便表达,定义那些穿过测控点的纬线称为测控纬线。
测控纬线长度用u 表示,控纬线的纬度用W 表示(为了便于数学计算,纬度也用弧度制表示)。
这里算出u 和W 的关系函数。
μ的直径等于2Rcos W ,进而可得出:
μ=2πRcosW (3)
模型建立及求解
1.当测控纬线条数m 已知时同一测控纬线上连接相邻两测控点的测地线长度l 的计算。
如图3,d=AB ,所有圆直径为L ,已知测控纬线数为m ,设AC=x ,DB=y ,从而可得方程关于x,y 的方程组:
L
x
y d
x y m =-=+-2)1(
⇒ 1
12++=
++-=
m L d y m L mL d x (4) 进一步计算l ,l 的计算可以近似地当做平面运
算,即: 图3
442
22x L l -= 2
2
12⎪⎭
⎫ ⎝⎛++--=⇒m L m L d L l (5)
2.测控纬线条数m 、测控纬线纬度w (弧度制单位)、相邻两测控点的测地线长度l 、和该测控
图3纬线上的测控点个数n 的建模。
因为,当测控纬线条数m 为奇数时,由于南北半球对称,赤道也将是一条测控纬线;当测控纬线为偶数时,所有测控纬线和测控点都在赤道两边,与m 为奇数时模型不同,所以要把m 取值的奇数偶数两种情况分开建模。
A.当m 为奇数的时候如图3,虚线圆是单个测控点所测空域的投影区域。
J 1J 2所在的测控纬线到赤道的测地线距离为等式(4)中的y ,结合式(4)得赤道一侧第i 条测控纬线的纬度:
()()
1++=
m R L d i W i ,再由Wi 结合式(2)、式(3)可进一步得出赤道一侧第i 测控纬线长度μi 、和该测控纬线上的测控点个数ni 的值,整理为表2。
图4
表2:测控纬线条数为奇数时N 的求解参照表
i W i μi
n i
0(赤道) —
2πR
()
()[]()
2
2
2112L mL d m L m R +--++π
i
()()
1++m R L d i ()()
1cos
2++m R L d i R π
()
()[]()()()
1cos
2112
2+++--++m R L d i L mL d m L m R π
()
∑-=+=2
/11
02
m i i
n
n N
(6)(n i 的取值规则:当n i 有小数部分时进1取整数。
B.当m 为偶数时如图4。
AE 等于式(4)中的y ,J 1J 2所在的测控纬线到赤道的测地线距离为等于AE/2=y/2,由于赤
道北第二道测控纬线到第一道测控纬线的测地线距离为y ,结合式(4)得可得:
()()()
1212++-=
m R L d i W i ,由W i 结合式(2)、式(3)可进一步得出μi 、n i 的值,整理为表3。
图4
表3:测控纬线条数为偶数时N 的求解参照表
i W i
μi
n i
i ()()()
1212++-m R L d i ()()()
1212cos
2++-⋅m R L d i R π ()
()[]()()()()
1212cos
21122
2++-+--++m R L d i L m L d m L m R π
∑==2/1
2m i i n N (7) (n i 的取值规则:当n i 有小数部分时进1取整数。
)
编程计算最小的N 的值。
1.Matlab 程序设计:
程序输入部分:输入地球半径。
卫星高H ,赤道与卫星轨道夹角a 等。
计算部分:
如果夹角a=0时卫星在赤道上。
N=2πR/L 。
否则用关于m 的for 循环语句进入计算。
for 语句中给m 赋初值,因为测控纬线条数必须大于投影带宽d 和单个测控点测控区域直径L 的比值才能完全覆盖卫星出现的空域。
d/L 苦有小数部分就进1取整数,把所得值赋给m 做初值。
在for 语句主体部分结合前面所建模型,分别计算对应的总测控点个数N 和m+1(即增加一条测控纬线)时需求的总测控点个数N1,当N<N1时N 就是所求的最少的测控点。
这时break 跳出for 循环。
计算单个测控点空域的投影面A 和卫星轨道投影U 只需要依所推出函数试计算。
输出部分:输出A 、U 、N 。
2.程序代码见附码。
附码:程序环境(Matlab6p5)
%输入部分
R=6371;N=0;N1=0;
%算出L 和d
H=input('请输入卫星的平均高度(单位:km)H='); L=2*R*(acos(R/(R+H)*cos(pi/60))-pi/60);
a=input('请输入卫星轨道与赤道夹角(用弧度制)a='); d=2*a*R;
%算出N
if a==0
N=2*pi*R/L;
else for m=ceil(d/L):50 %给m赋初值
if mod(m,2)==1
N=2*pi*R/sqrt(L^2-((2*d-m*L+L)/(m+1))^2);
if m>1
for i=1:(m-1)/2
N=ceil(N)+4*pi*R/sqrt(L^2-((2*d-m*L+L)/(m+1))^2)*cos(i*(d+L)/(R*m+R));
end
end
for i=1:(m+1)/2
N1=ceil(N1)+4*pi*R/sqrt(L^2-((2*d-m*L+L)/(m+1))^2)*cos((2*i-1)*(d+L)/(R*m+R));
end
else for i=1:m/2
N=ceil(N)+4*pi*R/sqrt(L^2-((2*d-m*L+L)/(m+1))^2)*cos((2*i-1)*(d+L)/(R*m+R));
end
N1=2*pi*R/sqrt(L^2-((2*d-m*L+L)/(m+1))^2);
for i=1:(m+1)/2
N1=ceil(N1)+4*pi*R/sqrt(L^2-((2*d-m*L+L)/(m+1))^2)*cos(i*(d+L)/(R*m+R));
end
end
if N<=N1 break;
else N=0;N1=0;
end
end
end
str=['所需卫星测控站个数N=',num2str(ceil(N))];disp(str);。