卫星和飞船的跟踪测控论文
- 格式:doc
- 大小:366.50 KB
- 文档页数:11
第 1 章绪论1.1 本文的研究背景和意义新中国成立后,中国的航天事业创造了一个又一个辉煌的成绩,这几十年来,我国独立自主地研制成功了几十颗人造卫星,其中遥感卫星可利用星载可见光照相机等遥感仪器,获得大量对地观测照片,具有分辨力高、畸变小、比例尺适中、覆盖范围广、可连续观测、视点高、视域广、获取数据快、不受空域国界限制等优点,已成为国家制定环境保护策略、资源开发和利用不可缺少的技术支持,现已广泛应用于科学研究、工农业生产、军事侦察、环境保护领域,包括国土普查、石油勘探、地质调查、铁路选线、海洋海岸测绘、地图测绘、目标点定位、电站选址等多个领域。
由于遥感卫星的特殊功能要求,一般采用三轴稳定的控制方式,能够保证指向精度和控制稳定度等技术指标要求。
要保证遥感卫星的高精度、高可靠性和高稳定性的在轨长期运行,必须保证足够的指向精度和控制稳定度。
卫星的姿态控制系统对卫星的姿态精度和稳定度起了决定性作用。
姿态确定是卫星本体坐标系相对于参考坐标系的姿态定位过程,而姿态控制是卫星本体坐标系向参考坐标系的定向过程。
近年来随着卫星技术的不断提高,各种空间任务对卫星姿态控制的精度要求越来越高。
如对地观测卫星的指向精度从上世纪七十年代到本世纪初由1°提高到0.001°,寿命提高到数十年。
这就意味着高精度姿态控制技术迎来更快的发展,同时也意味其面临着更多的挑战。
我们知道,卫星是一个极其精密的航天器设备,而且造价高昂,一旦发射进入太空中就很难对其进行维护,这对卫星研发工作带来了很大的难度,要求星上的各类系统和设备有着极高的稳定性。
同时也由于其成本较高,运行环境是外太空环境,因此在地面很难对其进行全面的物理仿真实验,这就要求在初期的系统仿真论证中能够考虑多方面实际因素,对卫星在轨运行时的各种工作状态和星上系统进行仿真研究,以此来验证卫星设计工作的可行性以及稳定性。
在仿真实验基础上,指导卫星的实际研发工作。
本课题就是在此背景下展开各项研究工作。
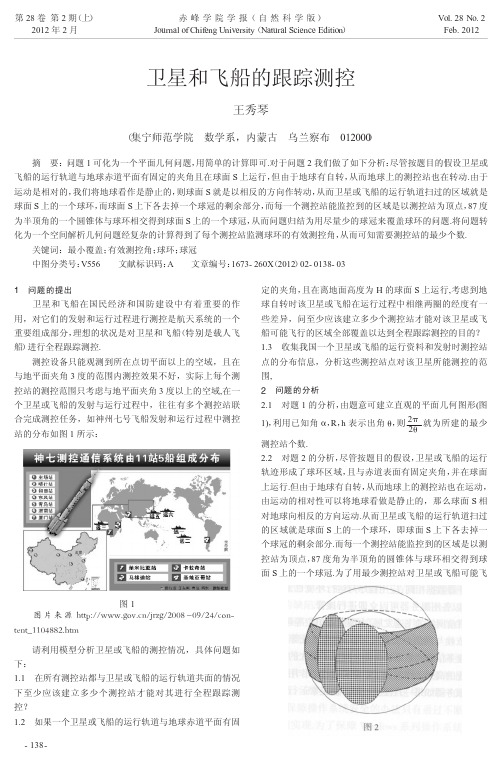
Vol.28No.2Feb.2012赤峰学院学报(自然科学版)Journal of Chifeng University (Natural Science Edition )1问题的提出卫星和飞船在国民经济和国防建设中有着重要的作用,对它们的发射和运行过程进行测控是航天系统的一个重要组成部分,理想的状况是对卫星和飞船(特别是载人飞船)进行全程跟踪测控.测控设备只能观测到所在点切平面以上的空域,且在与地平面夹角3度的范围内测控效果不好,实际上每个测控站的测控范围只考虑与地平面夹角3度以上的空域,在一个卫星或飞船的发射与运行过程中,往往有多个测控站联合完成测控任务,如神州七号飞船发射和运行过程中测控站的分布如图1所示:请利用模型分析卫星或飞船的测控情况,具体问题如下:1.1在所有测控站都与卫星或飞船的运行轨道共面的情况下至少应该建立多少个测控站才能对其进行全程跟踪测控?1.2如果一个卫星或飞船的运行轨道与地球赤道平面有固定的夹角,且在离地面高度为H 的球面S 上运行,考虑到地球自转时该卫星或飞船在运行过程中相继两圈的经度有一些差异,问至少应该建立多少个测控站才能对该卫星或飞船可能飞行的区域全部覆盖以达到全程跟踪测控的目的?1.3收集我国一个卫星或飞船的运行资料和发射时测控站点的分布信息,分析这些测控站点对该卫星所能测控的范围,2问题的分析2.1对题1的分析,由题意可建立直观的平面几何图形(图1),利用已知角α,R ,h 表示出角θ,则2π2θ就为所建的最少测控站个数.2.2对题2的分析,尽管按题目的假设,卫星或飞船的运行轨迹形成了球环区域,且与赤道表面有固定夹角,并在球面上运行.但由于地球有自转,从而地球上的测控站也在运动,由运动的相对性可以将地球看做是静止的,那么球面S 相对地球向相反的方向运动.从而卫星或飞船的运行轨道扫过的区域就是球面S 上的一个球环,即球面S 上下各去掉一个球冠的剩余部分.而每一个测控站能监控到的区域是以测控站为顶点,87度角为半顶角的圆锥体与球环相交得到球面S 上的一个球冠.为了用最少测控站对卫星或飞船可能飞卫星和飞船的跟踪测控王秀琴(集宁师范学院数学系,内蒙古乌兰察布012000)摘要:问题1可化为一个平面几何问题,用简单的计算即可.对于问题2我们做了如下分析:尽管按题目的假设卫星或飞船的运行轨道与地球赤道平面有固定的夹角且在球面S 上运行,但由于地球有自转,从而地球上的测控站也在转动.由于运动是相对的,我们将地球看作是静止的,则球面S 就是以相反的方向作转动,从而卫星或飞船的运行轨道扫过的区域就是球面S 上的一个球环,而球面S 上下各去掉一个球冠的剩余部分,而每一个测控站能监控到的区域是以测控站为顶点,87度为半顶角的一个圆锥体与球环相交得到球面S上的一个球冠,从而问题归结为用尽量少的球冠来覆盖球环的问题.将问题转化为一个空间解析几何问题经复杂的计算得到了每个测控站监测球环的有效测控角,从而可知需要测控站的最少个数.关键词:最小覆盖;有效测控角;球环;球冠中图分类号:V556文献标识码:A 文章编号:1673-260X (2012)02-0138-03图片来源/jrzg/2008-09/24/con -tent_1104882.htm图1第28卷第2期(上)2012年2月138--行的区域全部覆盖达到全程跟踪测控,即问题归结为用尽量少的球冠来覆盖球环的问题.则需要把测控站都建在赤道上,两个相邻的测控站可以分别形成两个测控区域,这两个测控区域相交后可得到两个交点,这两个交点恰好在球环的上下边界处,才能全部覆盖球环区域,以达到全程跟踪测控的目的,即将问题转化为一个空间解析几何问题.由此可以作出图3,经过复杂的计算得到了每个测控站监测球环有效测控角,即平面A'OB'与平面AOB所形成二面角A'B'-O-AB的平面为覬则平面角得二倍就是有效测控的最大范围,可知2π2覬就是所建最少测控站个数.3模型的基本假设与参数说明3.1基本假设(1)卫星或飞船的运行轨道是圆.(2)测控站的选择不受地域等各种因素的限制,由于所求得最少测控站得个数,所以测控站选在赤道上建立.3.2参数说明α:监控站监控视角的一半;θ:测控区域所对地球圆心角的一半;γ:卫星或飞船的运行轨道与地球赤道平面的固定夹角;β:与固定夹角γ互余的角;覬:相邻两个侧空站的有效测控视角的一半h:地球表面到卫星或飞船轨道的高度;R:地球的半径;l:地球表面上一点G到点N的距离;s:卫星或飞船运行轨道上一点M到点N的距离;S:表示卫星或飞船运行的球面;K:表示测控站与卫星或飞船得运行轨道共面时所需测控站的最少个数;K':表示测控站与卫星或飞船得运行轨道共面时所需测控站的个数;P:表示卫星或飞船得运行轨道与地球赤道平面由固定夹角时所需测控站的最少个数;P':表示卫星或飞船得运行轨道与地球赤道平面由固定夹角时所需测控站的个数;4模型的建立与问题的求解4.1对问题1的解答依据题意,有如下平面图:以球心O为圆心,R为半径的圆代表地球,R+h为半径的圆代表卫星或飞船运行的轨迹.根据图3有cosθ=R+LR+h(1)tanα=SL(2)由(2)变形得S=tanα(3)根据勾股定理得(R+h)2=(R+L)2+S2(4)将(3)代入(4)得(R+h)2=(R+h)2+(Ltanα)2(5)由(5)整理得(tanα2+1)L2+2RL-(2RH+h2)=0(6)由(6)解得L=-R±R2+(tan2+1)(2Rh+h2)姨由L≥0得L=-R+R2+(tan2+1)(2Rh+h2)姨(tan2+1)(7)将(7)代入(1)得cosθ=-R+-R+(R+1)2+tan2α(2Rh+h2)姨tan2α+1R+h(8)化解(8)得cosθ=Rtan2α+(R+h)2+tan2α(2Rh+h2)姨(R+h)(tan2α+1)(9)由(9)得,θ=arccos=Rtan2α+(R+h)2+tan2α(2Rh+h2)姨(10)则测控站的最少个数为K'=2π=π(11)当K'为整数时K=K'否则K=[K']+1(2)对问题2的解答以球面S和地球共圆中心为圆心,z轴垂直向上,赤道所在平面为xoy面,建立直角坐标系,则地球表面方程为x2+y2+z2=R2,球环S的方程为x2+y2+z2=(R+h)2,在图4中,AB 所在的球冠为一个测控站覆盖的区域,为此测控站建立在赤道与x轴的交点O'上,A'和B'相邻的两个测控站的交点,并且交点分别在球环的上下边界,C和C'分别为AB和A'B'的中点,则平面ABO和平面A'B'O构成的二面角就是有效测控角的一半,∠COC'为二面角的平面角,以下我们来求此角.由图4得x2+y2=tan2βz2x2+y2+z2=(h+R)姨2(13)解(13)得z2=(h+R)2(14)139--将(14)代入(13)得球环上边界方程;x 2+y 2=tan 2β(h+R)21+tan 2β(15)由图4得x 2+y 2=tan 2α(x-R)2x 2+y 2+z 2=(h+R)2(16)解(16)得,x=Rtan 2α±(h+R)2+tan2αR(2h+R)姨(17)将(17)代入(16)得,y 2+z 2=tan 2αRtan 2α±(h+R)2+tan 2αR(2h+R)姨-姨姨R2(18)由(15)和(18)联立得方程组,x 2+y 2=tan 2β(h+R)2y 2+z 2=tan 2αRtan 2α±(h+R)2+tan 2αR(2h+R)姨tan2α+1-姨姨R2姨姨姨姨姨姨姨姨姨姨姨姨姨(19)化解(19)得,x 2-z 2=tan 2β(h+R)2-tan 2αRtan 2α±(h+R)2+tan 2αR(2h+R)姨tan2α+1-姨姨R2(20)将(14)和(20)联立得z 2=(h+R)2x 2-z 2=tan 2β(h+R)21+tan 2β-tan 2αRtan 2α±(h+R)2+tan 2αR(2h+R)姨tan2α+1-姨姨R 2姨姨姨姨姨姨姨姨姨姨姨姨姨(21)解(21)得A'的坐标为x'=(h+R)2-tan 2α(±(h+R)2+Rtan2α(2h+R)姨-R)2姨y'=tan 2α±(h+R)2+tan 2αR(2h+R)姨-R 姨2-(h+R)21+tan2β姨姨姨姨姨姨姨姨姨姨姨姨姨姨由B'点与B 点关于x 轴对称可得B'(x',y')由C'点是B'点和B 点的中点可得C'(x',y')oc'=x'2+y'2姨由图3得cos γ=ocR+h(22)将(22)变形得oc=(R+h)cos γ即C((R+h)cos γ,0)由此开可以得cos 覬=o 姨c oc 姨姨'|o 姨c ||oc姨姨'|即覬=arccos1-tan 2α(±(h+R)2+Rtan2α(2h+R)姨-R)2(1+tan 2α)2(R+h)2姨所以侧控站最少个数为P'=2π2覬=π覬当P 为整数时P=P'否则P=[P']+1———————————————————参考文献:〔1〕刘承平.数学建模方法[M].北京:高等教育出版社,2002.〔2〕吕林根.解析几何[M].北京:高等教育出版社,2001.140--。
卫星和飞船的跟踪测控模型摘要:本文研究的是在不同条件下建立最少的卫星或飞船的跟踪测控站,以达到对卫星或飞船实施全程跟踪测控的目的。
问题一中不考虑地球的自转,卫星或飞船的飞行轨迹就是一个固定的圆周。
依据得到的图形运用三角函数相关知识建立数学模型一,先计算一个测控站测控范围,再求出测控整个飞行轨迹所需最少的测控站的数目。
并计算得出卫星或飞船在即将脱离地球引力的情况下对其测控所需的测控站的数目至少为3,最后又以神舟七号飞船为例检验了该模型,所得此种情况下要想对其全程测控需要12个测控站。
问题二中考虑到地球自转,此时卫星或飞船在运行过程中相继两圈的经度有一些差异,并且卫星或飞船的运行轨道与地球赤道平面有固定的夹角,因而卫星或飞船轨道构成一个环形区域。
然后,用圆的最大内接正方形来代替圆对环形区域进行覆盖,得到一个合理的所需测控站个数的一般表达式,并带入神七相关数据得到全程测控神七时所需的测控站的个数为37个。
问题三,用与问题二中类似的方法求出测控站的测控范围在环行区域投影圆的内接正方形的边长,再依据每一个纬度或经度在地球表面的实际跨度长求出测控站所测卫星或飞船在其环绕球面上纬度和经度范围,并用上述在地面上的投影描述测控站的实测范围。
本文中,巧妙之处在于采用易操作的圆内接正方形来代替圆覆盖环形区域,此方法有一定的借鉴和推广意义。
关键词:测控站环形区域投影测控范围一问题的重述和分析1.1问题的重述卫星和飞船在国民经济和国防建设中有着重要的作用,对它们的发射和运行过程进行测控是航天系统的一个重要组成部分。
航天测控的理想状况是对卫星和飞船(特别是载人飞船)进行全程跟踪测控。
测控设备只能观测到所在点切平面以上的空域,实际上每个测控站的测控范围只考虑与地平面夹角3度以上的空域。
在一个卫星或飞船的发射与运行过程中,往往有多个测控站联合完成测控任务。
请利用模型分析卫星或飞船的测控情况,具体问题如下:问题1:在所有测控站都与卫星或飞船的运行轨道共面的情况下至少应该建立多少个测控站才能对其进行全程跟踪测控?问题2:如果一个卫星或飞船的运行轨道与地球赤道平面有固定的夹角,且在离地面高度为H的球面S上运行。
21世纪各国深空探测计划航天科技与卫星控制基础知识课程论文XXXX学院XX系XX XXXXXXXXXXXXXXXX2011/XX/XX引言:浩瀚乾坤,目之所及,莫非宇宙之地。
然则人之欲无穷也,每思宇宙之无穷,则欲穷宇宙之极,探无边星空,晓世间奥妙。
无论古今中外,无论能人志士还是平民百姓无不对我们头顶的一方星空怀有敬畏之心,同时,还有一份好奇与求知。
当人类有能力探索头顶的一方世界之时,好奇心便一发而不可收。
当今,在技术允许的情况下,人类对于探索神秘的太空的欲望更强了,尤其是在地球资源日益枯竭、环境愈加糟糕、人口过多、军事利用等等情况下,探索太空、寻求资源及人类未来的栖身之地等利益的驱使下,世界各国更是争相发展载人航天、深空探测等等项目。
正文自从1957年10月4日前苏联发射世界上第一颗人造卫星以来,前苏联、美国、发过、中国、日本、印度、以色列、英国等国家和欧洲航天局先后研制出上百种运载火箭,修建了二十多个大型航天发射场,建立了完善的地球探测网。
同时,各国还联合建立了国际空间站用以进行空间科学研究和工作。
人类的足迹也已经他上了月球,而人类探索的脚步更是遍布太阳系,金星、火星、木星等太阳系行星周围,都有人类的探测卫星甚至探测飞船存在。
而更远的,美国旅行者号宇宙飞船甚至已经飞出了太阳系,在进行更为遥远的太空探测,同时把人类文明带向更为遥远的星空,探索是否有地外智慧文明的存在。
据相关统计,截至2004年底,世界上进行了数十次成功的航天发射。
虽然欧洲航天局的“猎兔犬2号”登陆器于2003年年底在登录火星时失踪,日本的“希望号”火星探测器也最终宣告失败,但随着2004年美国的“勇气号”和“机遇号”的成功登录火星,以及美国、欧盟、中国、印度、日本等国家和地区相继推出的新航天发展计划,人类对太空探索的热潮再次点燃。
2004年是深空探测丰收的一年,2004年初,飞行已久的美国“星尘号”彗星探测器与“怀尔德2号”彗星交会,并且近距离的取回了慧核物质样本。
卫星跟踪通信技术论文(全文)一、卫星的跟踪技术跟踪系统由基本形式均由天线、馈源、接收设备(或计算机)、伺服操纵单元等组成。
按照天线跟踪目标的方式分类有:①手动跟踪②程序跟踪③自动跟踪1、手动跟踪手动跟踪是指根据经验或预知的目标位置数据(如卫星轨道位置)随时间变化的规律,用人工按时调整天线的指向,或者是根据收到信号的大小用人工方式操纵跟踪系统,使其接收最强的信号(用频谱仪或接收机监视)。
手动跟踪可以每隔一段时间进行一次。
手动跟踪系统由天线、频谱仪(或接收机)、伺服操纵器等组成。
手动跟踪设备最为简单,可应用于地面站小口径天线对同步卫星的跟踪等指向精度和实时性要求较低的场合。
2、程序跟踪将卫星的星历数据和天线平台地理坐标和姿态数据一并输入计算机,计算机对这些数据进行处理、运算、比较,得出卫星轨道和天线实际角度在标准时间内的角度差值,然后将此值送入伺服操纵器,驱动天线,消除误差角。
不断地比较、驱动,使天线一直指向卫星。
程序跟踪可以应用在地面或车载小口径天线对卫星的跟踪。
由于地球的密度不均匀和其他干扰的影响,星历数据会随着时间有小的变化,一般很难计算出长时间的精确轨道数据。
从而进行长时间的跟踪会有积存的误差。
3、自动跟踪自动跟踪是指根据地球站天线接收到卫星所发的信标信号,通过变频、放大输入跟踪接收机,检测出俯仰和方位误差信号,根据误差信号大小和方向由伺服操纵器驱动天线转台系统,使天线自动地对准卫星。
这种跟踪方式没有误差积存,可以长时间连续跟踪。
由于卫星位置受影响的因素太多,无法长期预测卫星轨道,故目前大、中型地球站主要采纳自动跟踪为主,手动跟踪和程序跟踪为辅的方式。
按照自动跟踪原理和设备组成,自动跟踪可以具体分为三种体制:步进跟踪、圆锥扫描跟踪和单脉冲跟踪。
3、1步进跟踪步进跟踪是指天线指向以一定的步进向接收电平增大的方向进行不断调整。
步进跟踪是开环方式,跟踪精度较低,跟踪速度较慢。
步进跟踪适用于要求跟踪速度较低的系统中,如漂移速度较慢的同步卫星的跟踪。
2009高教社杯全国大学生数学建模竞赛编号专用页赛区评阅编号(由赛区组委会评阅前进行编号):赛区评阅记录(可供赛区评阅时使用):评阅人评分备注全国统一编号(由赛区组委会送交全国前编号):全国评阅编号(由全国组委会评阅前进行编号):卫星和飞船的跟踪测试摘要卫星和飞船对国民经济和国民建设有重要的意义,对卫星的发射和运行测控是航天系统的重要部分,理想状况下是对其进行全程跟踪测控。
本文通过建立空间直角坐标系,得到了卫星或飞船飞行的参数方程,并利用Matlab软件模拟出卫星飞行的轨迹图,借助图形,对卫星和飞船的跟踪测控问题进行建模,得到了在不同情况下对卫星或飞船进行全程跟踪测控所需建立测控站数目的一般方法。
问题1:在所有测控站都与卫星或飞船的运行轨道共面的情况下,采用CAD制图法和解析三角形两种方法,分别计算出在所有测控站都与卫星或飞船运行轨道共面的情况下至少应建立12个测控站才能对其进行全程跟踪测控。
问题2:通过建立空间直角坐标系,给出卫星或飞船的运行轨道的参数方程。
同时,验证了其运行轨道在地球上的投影轨迹为一关于赤道平面对称的环形带状区域。
最后,给出对卫星或飞船可能飞行区域进行全部覆盖所需建立测控站的模型。
问题3:对于陆地上的观测点,通过对“神舟七号飞船”相关信息查询,进行几何角度的和长度计算,得出观测点能观测到的区域约为s,再计算出飞船可能飞行的面积,通过进一步的优化与计算得出陆地上的观测点能观测的区域为18.67%.关键词:轨道星下点测控点相对运动优化一、问题重述卫星和飞船对国民经济和国民建设有重要的意义,对卫星的发射和运行测控是航天系统的重要部分,理想状况下是对其进行全程跟踪测控。
测控设备只能观测到所在点切平面以上的空域,实际上每个测控站的范围只考虑与地面成3度以上的空域。
往往要有很多个测控站联合测控任务。
问题1:在所有测控站都与卫星或飞船的运行轨道共面的情况下至少应建立多少个测控站才能对其进行全程跟踪测控?问题2:如果一个卫星或飞船的运行与地球赤道有固定的夹角,且在离地面为H的球面S上进行。
卫星和飞船的跟踪测控分析摘要:建立区域卫星导航系统的测控网是卫星导航系统要解决的关键问题之一。
本文讨论我国测控站的布设问题,利用MATLAB建立卫星或飞船运行模型,计算出测控站需要个数,结合CAD画图来分析测控站对卫星或飞船的可观测性。
分析测控站对卫星或飞船的全程观测的影。
利用我国有限的国土跨度和航天测控资源确保对卫星或飞船的全称测控任务的完成。
区域导航卫星的特殊性和混合轨道的复杂性对测控站的布局提了性的要求,从测控站对导航卫星的可见性,观测几何强度以及跟踪定轨精度的几方面来看,在国内布设测控站能满足卫星导航系统的基本测控要求,但各测控站应尽量拉开,基线越长,测控站几何条件越优。
对于问题一,通过分别假设卫星绕地球运行的轨道是一个圆和一个椭圆来建立两个模型,通过模型的求解得到了在所有测控站都与卫星或飞船的运行轨道共面的情况下至少应建立3个测控站才能对其进行全程跟踪测控。
对于问题二,卫星或飞船的运行轨道有一固定夹角 ,且卫星或飞船在离地面高度h的球面S上运行。
我们将卫星或飞船的运行轨道投影到地球表面上,得到如图03-2所示,由于卫星或飞船的运行轨道不变,而地球不断在自转,所以轨道的投影面在不断变化,所以测控站全程测控的范围即为卫星轨道的投影面。
对于问题三,我们在互联网上搜索神七发射时的测控站点的分布信息,此时将这些数据作为有效数据进行卫星定轨,并结合问题一和问题二的解题步骤,分析这十个测控站点对神七所能测控的范围。
通过模型的求解得到了在所有测控站都与卫星或飞船的运行轨道共面的情况下至少应建立10个测控站才能对其进行全程跟踪测控。
关键词:区域卫星导航系统测控站全程跟踪测控星下点覆盖1问题的重述区域卫星系统导航系统可采用地球静止轨道(GEO)、倾斜地球同步轨道(IGSO)和中高轨(MEO)等混合轨道的卫星,它不仅要求轨道确定和轨道预报精度高,而且对轨道确定是实时性,轨道预报及事后精密轨道的时效性也有较高要求.我国区域卫星导航系统一版主要在国内建立测控网,因此,合理布局测控站,建立卫星导航系统测控网是我国卫星导航系统首先要解决的关键问题之一,所谓布局是指测控网为完成对卫星的跟踪、观测定轨和控制,地面站布设位置要合理,所需的地面站数要最少,实质上是解决对卫星轨道的覆盖问题。
关于卫星和和飞船跟踪测控问题的数学模型朱诗磬,叶骏,陈资辛编者按:本文能基于椭圆轨道建立卫星和飞船的跟踪测控问量。
本文能较好地研究了球冠的表面积和蜂巢式覆盖数学模型,利用MATLB软件。
计算跟踪所需的最少测控站数量,并用神舟五号飞船的相关资料进行模型检测。
摘要:本文针对卫星和飞船的跟踪和测控问题。
对不同的情形建立不同的模型,利用MATLB软件求得了对卫星和飞船进行全程测控所需要的最少测控数量,并搜集了神舟五号飞船的相关信息,对其观测站的测控范围进行分析,较完善的解决了本问题,针对问题1,未考虑地球自转的影响,首先给出了一种轨道为椭圆时的求解算法,当轨道为圆形时,我们给出了一种更简单的数学模型利用MTALB软件,求得了不同的模型,利用MATLB软件求出对不同类型不同轨道倾角的卫星实现全程跟踪测控时的最少测控站数量而且可以求得在不同纬度上测控站的数量。
针对问题3,搜索了神舟五号飞船的运行资料和发射时测控站的分布资料,用时间表示测控站的测控范围。
关键词:跟踪测控;轨道椭圆;测控站;1 问题分析(略)2 符号说明H:卫星或飞船运行时离地面的高度E:测控站测量卫星的起,止俯仰角,ο3E=n:全程跟踪时所需要建立的测控站数量G:表示万有引力,;2-11/kg2G∙=⨯.6m67N10a:表示卫星或飞船相对地面的偏移角度1s:表示一个观测站所观测到的面积S:卫星或飞船运行球体的表面积M:地球的质量,kg⨯=M24610R:地球半径,6371kmr=T:卫星或飞船的运行周期V:卫星或飞船的运行速度α:测控站测量卫星时的地心角W:地球自转角速度P:表示覆盖率l:椭圆的弧长3 模型假设1)地球近似的看做为球体;2)忽略除地球以外的其他因素对卫星或飞船运动的影响;3)测量设备只能测量到与地平面夹角为︒3以上的空域;4)把卫星视为一个质点;5)不考虑地球公转的影响。
4 模型的建立和求解4.1 问题1模型建立和求解补充问题一的假设,不考虑地球自转对卫星或飞船 的运行带来摄动的影响。
卫星和飞船的跟踪测控摘要本文对问题中各种情况下应建立的测控站个数进行了模型构建、并采集资料,并分析了资料中所建测控站对卫星所能测控的范围。
首先,通过对文章仔细分析、并查阅相关资料和合理的假设,给所分析的问题提供了思路及依据,进而得到明确的答案和相关模型。
对于第一问,在所有测控站都与卫星或飞船的运行轨道共面的情况下,我们想到使卫星或飞船飞的尽可能高,这样测控站测控范围就越大,测控站就越少,通过画图及正弦定理求出测控最大视角,再用︒360除以测控最大视角,可得至少应建立的测控站个数,用MATLAB 软件算得20个。
由于第二问中,卫星围绕地球转的同时,地球也再自转,卫星运行过程中并存在有经度差异,故此题过于复杂,我们对过程采用分解后再结合的方法,先假设地球不自转而卫星旋转,据画图及正弦定理可得测控最大视角2β。
在地球自转同时卫星也转动的时候,在卫星运转一周时间内,地球所在卫星旋转轨道平面内所走的距离可求得:t V C 11=。
通过画图分析得两个测控站的距离:︒=90βπR l 。
则由于地球自转而引起测控站多余的数目为:βπηR t V l C 1190︒=='。
卫星旋转w 周时其最大经度差为2π,由以上推论在同一纬度上增加的测控站个数βπβπη=='''22;则总的测控站数目为: H R R +︒-︒︒=93sin arcsin 8790η(R Vt πλcos 2-)(HR R s i i n +︒-︒+93arcsin 871π) 在问题三中,我们通过查阅相关资料,并从中获得了有关神七运行的基本信息,通过对上述所建模型进行检验,得出的测控站的位置以及所测控的范围与实际情况基本吻合。
关键词:卫星、运行轨道、地球自转、经度差、测控站一、问题重述卫星和飞船在国民经济和国防建设中有着重要的作用,对它们的发射和运行过程进行测控是航天系统的一个重要组成部分,理想的状况是对卫星和飞船(特别是载人飞船)进行全程跟踪测控。
测控设备只能观测到所在点切平面以上的空域,且在与地平面夹角3度的范围内测控效果不好,实际上每个测控站的测控范围只考虑与地平面夹角3度以上的空域。
在一个卫星或飞船的发射与运行过程中,往往有多个测控站联合完成测控任务,如神州七号飞船发射和运行过程中测控站的分布如下图所示:图略1. 在所有测控站都与卫星或飞船的运行轨道共面的情况下至少应该建立多少个测控站才能对其进行全程跟踪测控?2.如果一个卫星或飞船的运行轨道与地球赤道平面有固定的夹角,且在离地面高度为H的球面S上运行。
考虑到地球自转时该卫星或飞船在运行过程中相继两圈的经度有一些差异,问至少应该建立多少个测控站才能对该卫星或飞船可能飞行的区域全部覆盖以达到全程跟踪测控的目的?3. 收集我国一个卫星或飞船的运行资料和发射时测控站点的分布信息,分析这些测控站点对该卫星所能测控的范围。
二、基本假设1、每个测控站的测控范围均相同。
2、将地球假设为圆形。
3、假设没有阻碍物阻挡测控站所测控的范围。
4、假设卫星运转方向大体上自西向东,运行轨迹假设为圆形。
5、假设从开始围绕地球转就已经进入了轨道,不考虑其发射过程。
6、测控系统及卫星一直保持正常,皆不出现故障。
(在每一步求解过程中所需要的假设,在下文中求解过程前给出)三、符号说明R: 地球半径;M: 地球质量;m: 卫星或飞船质量;V: 地球自转速度;V: 地球在卫星运行轨道所在面的旋转速度;1V: 卫星或飞船运行速度;21C : 地球所在卫星运转轨道平面上所转动距离;H: 卫星或飞船进入轨道离地面的高度;G: 万有引力常量;Z: 在假设地球不自转时测控站总数;n: 问题(1)中至少应该建立的测控站数;t: 卫星运转一周所需的时间;g: 重力加速度;l : 两个测控站间的范围;θ: 卫星在运行过程中相继两圈的经度差;v : 问题(1)中卫星运转速度;λ: 卫星的运行轨道与地球赤道平面固有的夹角;w : 卫星所转的圈数;η': 想象的没起到作用的测控站数目;η'': 当卫星旋转一周(地球也在自转),在不考虑相继两圈有经度差时,应设,测控站的数目;η''': 在同一纬度上增加的测控站个数;η: 在所有问题都考虑下,至少应建测控站个数;四、其他说明为方便解题及阅读,本文中的“卫星或飞船”简写为“卫星”。
五、问题分析问题1、当所有测控站都与卫星的运行轨道共面时,要建立最少的测控站对其进行全程跟踪测控,就要使卫星在不脱离地球的情况下飞的尽量高,才使每个测控站所测的范围越大,利用率最高。
分析此题我们画得图示1,由测控站所能测的最大范围角与卫星轨道的交点A 、C 向地心O 连接,可得到∠AOC ,求得∠AOC,再用AOC∠︒360即得到所建测控站个数。
问题2、由题目分析可知:卫星围绕地球转的同时,地球还要自转,若一同联系起来考虑相当复杂,于是我们考虑将其分解成以下几部分来求解:(1)、从卫星运行轨迹正上方看下去,将其近似看成两个圆(如图示1),利用问题1结论求出含未知数H 的角β,则得到总的测控站点为AOC ∠︒360(去余数进1)。
(2)、在此我们假设地球在卫星运行轨道所在面的旋转速度为1V ,卫星运转速度为2V ,卫星运转一周所用时间为t ,在这段时间内地球所在卫星运转轨道平面上所转动距离为1C =t V 1,在这段距离内所设测控站,则起不到作用,我们需要用总的测控站减去这些多余的,进而得到卫星旋转一周所能用到的测控站个数。
(3)、地球在卫星运行轨道所在面的旋转速度为1V ,卫星运转速度为2V ,可粗略将地球自转速度V 分解为在卫星运行轨道所在面的旋转速度1V 和竖直速度,从而用含V 的式子表示1V ,而卫星旋转与地球自转的过程中会产生经度差,我们可以利用时间与速度等将其求出,从而算出同一纬度上测控站的个数,进而得出至少所需监控站的个数。
问题3、通过查阅资料我们首先确定测控站的个数以及地点,然后通过一、二问的结论,对测控站进行分析,计算出每一个监测站的具体测控的范围和领域。
六、模型的建立与求解求解问题1:建立模型前应知,测控站数目应与地球半径、测控站测控范围、卫星速度及与地面高度有关。
每个测控站的有效测控范围为:180°-(3°+3°)=174°根据分析,求出∠β就可得到∠AOC,我们先求出∠α即可知∠β,对于∠α的求解我们用到正弦定理来求,根据图示1及相关符号得:αsin )390sin(R H R =︒+︒+ → sin α=H R R +︒93sin ; ①地球半径为常数,查得其数据为R=6.37×610m,还需求出卫星离地面 的高度H ,可用万有引力定律:H R mv H R GMm +=+22)( → H=2v GM R -;② 又由: mg RGMm =2 → GM=g 2R ;③ 将③代入②得:H=R vgR -22;④ 将④代入①得:gR v ︒=93sin sin 2α → gRv ︒=∠93sin arcsin 2α;⑤ 其中v 应取范围:7.9km/s ≤v ≤11.6km/s;要使β最大,则α最小,即v 最小,取v =7.9km/s对于⑤中的α我们用MATLAB6.5 进行运算:>> asin((7900^2*sin((93*pi)/180))/(10*6370000))ans =1.3626>> (1.3626*180)/pians =78.0712∠α≈78°,则∠β=180°-93°-∠α=9°,∠AOC=18°;由此我们便可得到至少应该建立的测控站数:n =AOC ∠︒360=2018360=︒︒求解问题2:解决此题,我们根据分析中,用分解过程的方法进行分步求解,最后再把它们联系在一起得出结论。
(1)、我们还是根据问题1的解题过程,假设地球不自转而卫星旋转,从卫星正上方向下俯视得到图示2,利用正弦定理可得:αsin )390sin(R H R =︒+︒+ → sin α=H R R +︒93sin → α=H R R +︒93sin arcsin β可根据外角等于不相邻两内角和求得:H R R +︒-︒=93sin arcsin87β;①则总的测控站数Z=β︒180; ②(2)、而实际中,地球在卫星旋转轨道平面内是做旋转运动的,下面我们要求:在卫星运转一周的时间内,地球所在卫星旋转轨道平面内所走的距离。
由卫星运转速度为2V ,卫星运转一周所用的时间t 为:2)(2V H R t +=π 在时间t 内,地球转动的距离1C 为:t V C 11=; ③下面讲两个监控站的距离:如图示2及讲解测控站在卫星轨道上所测控的最大范围是弧QS ,Q 、S 分别与地心连接,在地球上形成弧PR,则弧PR 也就是两个测控站的距离。
两个测控站的距离:︒=⨯︒=9023602βπβπR R l 则那些想象的没起到作用的测控站数目η'为:βπβπηR t V R t V l C 1119090︒=︒==';④ 由(1)、(2)可知,当卫星旋转一周(地球也在自转),在不考虑相继两圈有经度差时,应设测控站的数目η''为:②-④η''=Z -η'=β︒180-βπR t V 190︒;⑤ (3)、下面我们要求出经度差,经度差为:当卫星旋转一周时,地球所转的角度,如图示3,则经度差:θ=360°-π︒⨯1801R C 当卫星旋转w 周时,即旋转w 周的经度差为θw ; 即当βθ2w >1时,则需要增加监控站,若要使增加的测控站最少,则卫星旋转w 周时其最大经度差为2π,而w θ≥2π,所以卫星旋转w 周时最大经度差为π2;由以上推论在同一纬度上增加的测控站个数:βπβπη=='''22;⑥ 在η''个观测点中增加的个数为:ηη'''⨯''所以观测点总数为:ηηηη''+'''⨯''=在(2)中为:地球在卫星运行轨道所在面的旋转速度1V ,而地球自转速度为:V在运行过程中,我们可粗略地将1V 看作是地球自转速度V 分解的竖直速度,即λcos 1⨯=V V综上所述,当卫星的运行轨道与地球赤道的固定夹角为λ,且在离地面高度为H 的球面S 上运行, 地球自转时该卫星在运行过程中相继两圈的经度差异为θ时,至少应建立的测控站数目为:ηηηη''+'''⨯''=(将上面⑤、⑥代入其中)=[(β︒180-βπR t V 190︒)×βπ]+β︒180-βπR t V 190︒ =(βπβR t V 190180︒-︒)(βπ+1) =β︒90(R t V π12-)(1+βπ); ⑦将①式中的β代入⑦得:η=H R R +︒-︒︒93sin arcsin 8790(R Vt πλcos 2-)(HR R s i i n +︒-︒+93arcsin 871π);⑧求解问题3:神七测控站分布图神七有共十六个站上升段:主要测控站:东风站、渭南站、青岛站。