研控步进电机YKA2404S说明书
- 格式:pdf
- 大小:197.22 KB
- 文档页数:5
DKC一Y240智能步进伺候电机控控制器使用说明书DKC一Y240智能步进伺候电机控控制器是 DKC公司生产的一款智能步进电机控制器,具有体积小、重量轻、控制灵活、方便维护和节能等特点。
其主要参数如下:地址:本控制器主要由1个电机控制盒、1个步进驱动控制器;功能:支持步数设置,最多可设置3组步数;状态:定时、断电保护状态;通讯接口:网口连接。
产品特点:采用直流调速的控制方式,具有速度快、响应及时,无电流积点保护、低电压无干扰等特点;适合于小型的智能步进电机。
1.控制器应符合以下条件:a)控制器应具有过载保护、欠电流保护、过载报警等功能;b)控制器应具有定时功能、断电保护功能;c)控制器应能够根据使用需要调整参数;d)控制器应具有与控制器参数直接相关的软件功能(如通信接口、网口等);e)控制器应具有远程操作功能;f)控制盒中应有良好的温度和湿度条件。
e)控制器中应有良好的通风设备。
2.控制盒连接电源必须接在低电压无干扰的地方。
并保证外部电源正常。
如遇到外部电源异常断电,应先断开所有电源线,待异常恢复后再重新接上。
外部电源不允许接入控制盒及其它外部设备。
如有接线要求,请使用专用接线盒进行接线。
禁止用任何电线与其它设备连接及焊接。
注意:(1)不要接电源线上所有带金属外壳接电源。
(2)不要将电压过高或过低。
(3)不要在现场使用过低或过高的电源和开关设备。
(4)应保持现场清洁(如有污垢应及时用清洁)在使用过高或过低电源和开关设备时要采取措施使输出电压不超过额定电压的90%甚至更高,并尽量保持在一个范围内(见图1-1)。
3.所有步进电机应在无任何信号的情况下正常运行,并能在控制盒内直接进行控制。
a.若驱动电流大于等于额定电流,则在启动电机时应先接通电源,待电源正常后再启动电机。
b.若不能正常启动电动机,则应先将控制盒的各档位合上再启动。
c.当系统检测到需要运行过程出现异常时,要及时断开各电源。
d.如果是低速运行,则在启动到定速运转期间要先接通主电源,待其完全断开后再启动电机。
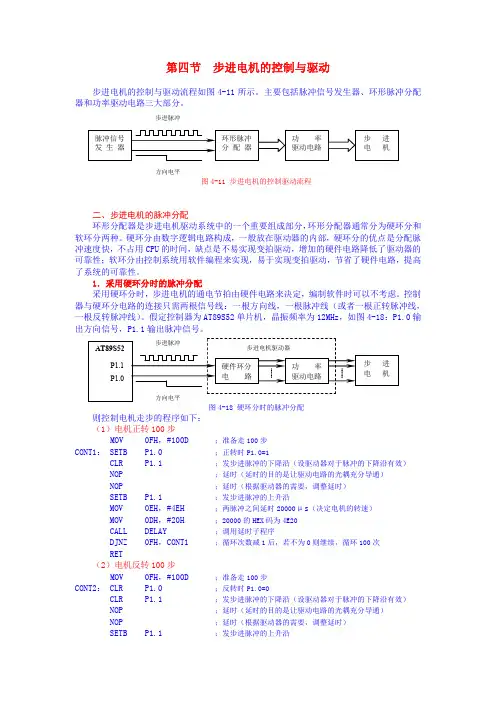
第四节 步进电机的控制与驱动步进电机的控制与驱动流程如图4-11所示。
主要包括脉冲信号发生器、环形脉冲分配器和功率驱动电路三大部分。
步进脉冲方向电平图4-11 步进电机的控制驱动流程二、步进电机的脉冲分配环形分配器是步进电机驱动系统中的一个重要组成部分,环形分配器通常分为硬环分和软环分两种。
硬环分由数字逻辑电路构成,一般放在驱动器的内部,硬环分的优点是分配脉冲速度快,不占用CPU的时间,缺点是不易实现变拍驱动,增加的硬件电路降低了驱动器的可靠性;软环分由控制系统用软件编程来实现,易于实现变拍驱动,节省了硬件电路,提高了系统的可靠性。
1.采用硬环分时的脉冲分配采用硬环分时,步进电机的通电节拍由硬件电路来决定,编制软件时可以不考虑。
控制器与硬环分电路的连接只需两根信号线:一根方向线,一根脉冲线(或者一根正转脉冲线,一根反转脉冲线)。
假定控制器为AT89S52单片机,晶振频率为12MHz,如图4-18:P1.0输出方向信号,P1.1输出脉冲信号。
则控制电机走步的程序如下:(1)电机正转100步MOV 0FH,#100D ;准备走100步CONT1: SETB P1.0 ;正转时P1.0=1CLR P1.1 ;发步进脉冲的下降沿(设驱动器对于脉冲的下降沿有效)NOP ;延时(延时的目的是让驱动电路的光耦充分导通)NOP ;延时(根据驱动器的需要,调整延时)SETB P1.1 ;发步进脉冲的上升沿MOV 0EH,#4EH ;两脉冲之间延时20000μs(决定电机的转速)MOV 0DH,#20H ;20000的HEX码为4E20CALL DELAY ;调用延时子程序DJNZ 0FH,CONT1 ;循环次数减1后,若不为0则继续,循环100次RET(2)电机反转100步MOV 0FH,#100D ;准备走100步CONT2: CLR P1.0 ;反转时P1.0=0CLR P1.1 ;发步进脉冲的下降沿(设驱动器对于脉冲的下降沿有效)NOP ;延时(延时的目的是让驱动电路的光耦充分导通)NOP ;延时(根据驱动器的需要,调整延时)SETB P1.1 ;发步进脉冲的上升沿MOV 0EH,#4EH ;两脉冲之间延时20000μs (决定电机的转速)MOV 0DH,#20H ;20000的HEX 码为4E20CALL DELAY ;调用延时子程序 DJNZ 0FH,CONT2 ;循环次数减1后,若不为0则继续,循环100次RET2.采用软环分时的脉冲分配如图4-19所示,该系统基于AT89S52单片机,利用扩展的可编程接口芯片8255A 的PB 口送出步进脉冲信号,经过驱动放大后,分别控制X 轴、Z 轴两个三相六拍反应式步进电机激磁绕组的通电顺序,以控制刀架在X、Z 两个方向的运动。
YKD2405PE总线型步进驱动器使用手册版本:V1.1深圳研控自动化科技股份有限公司目录目录 (2)版本修订历史 (1)前言 (2)第1章概述 (3)1.1产品介绍 (3)1.2特性 (3)1.3应用领域 (3)1.4产品命名规则 (4)第2章性能指标 (5)2.1EtherCAT特性 (5)2.2电气特性 (5)2.3使用环境 (6)第3章安装 (7)3.1安装尺寸 (7)3.2安装方法 (7)第4章驱动器端口与接线 (8)4.1接线示意图 (8)4.2端口定义 (9)4.2.1地址拨码 (9)4.2.2状态指示灯 (9)4.2.3EtherCAT通讯端口 (10)4.2.4输入输出端口 (10)4.2.5电机输出端口 (10)4.2.6电源输入端口 (10)4.3输入/输出端口操作 (11)第5章适配电机 (12)5.1电机尺寸 (12)5.2. 技术参数 (13)5.3 电机接线图 (14)第6章驱动器状态指示灯 (15)第7章一般故障排除方法 (16)第8章保修及售后服务 (17)8.1保修 (17)8.2售后服务 (17)YKD2405PE 使用手册 V1.1 版本修订历史版本修订历史YKD2405PE 使用手册 V1.1 前言前言感谢您使用本公司总线型步进驱动器。
在使用本产品前,请务必仔细阅读本手册,了解必要的安全信息、注意事项以及操作方法等。
错误的操作可能引发极其严重的后果。
声明本产品的设计和制造不具备保护人身安全免受机械系统威胁的能力,请用户在机械系统设计和制造过程中考虑安全防护措施,防止因不当的操作或产品异常造成事故。
由于产品的改进,手册内容可能变更,恕不另行通知。
用户对产品的任何改装我公司将不承担任何责任。
阅读时,请注意手册中的以下标示:第1章概述1.1产品介绍YKD2405PE总线型步进伺服驱动器是在数字型步进驱动器的基础上增加了EtherCAT总线通讯功能,同时支持智能运动控制功能。

深圳市研控自动化科技股份有限公司目录前言 (1)1概述 (2)1.1产品介绍 (2)1.2特性 (2)1.3应用领域 (2)1.4产品命名规则 (2)2性能指标 (3)2.1电气特性 (3)2.2使用环境 (3)3安装 (4)3.1安装尺寸 (4)3.2安装方法 (4)4 驱动器端口与接线 (5)4.1接线示意图 (5)4.2接口定义 (6)4.2.1状态指示灯 (6)4.2.2输入/输出端口 (6)4.2.3拨码开关 (6)4.2.4电源端口/通讯端口 (6)4.3输入/输出端口操作 (7)4.4拨码开关设定 (8)5 电机规格及接线 (10)5.1技术规格 (10)6报警排除 (11)7版本修订历史 (12)8修及售后服务 (13)8.1保修 (13)8.2售后服务 (13)前言感谢您使用本公司总线型步进电机驱动器。
在使用本产品前,请务必仔细阅读本手册,了解必要的安全信息、注意事项以及操作方法等。
错误的操作可能引发极其严重的后果。
声明本产品的设计和制造不具备保护人身安全免受机械系统威胁的能力,请用户在机械系统设计和制造过程中考虑安全防护措施,防止因不当的操作或产品异常造成事故。
由于产品的改进,手册内容可能变更,恕不另行通知。
用户对产品的任何改装我公司将不承担任何责任。
阅读时,请注意手册中的以下标示:本用户手册所述内容仅适用于以下机型:1概述1.1产品介绍ESS242-C系列总线型步进电机驱动器是在数字型步进驱动器传统数字闭环步进驱动器基础上增加了总线通讯及单轴控制器功能。
总线通讯采用CAN总线接口,协议上支持CANopen协议的CiA301及CiA402子协议。
1.2特性⚫新一代32位DSP技术,高性价比、平稳性佳、低噪声、低振动。
⚫采用CAN总线通讯,支持CANopen协议的CiA301及CiA402子协议,最多可挂载15个设备。
⚫CAN总线通讯波特率默认500Kbps。
⚫总线型驱动器可以实现远距离可靠控制,有效解决干扰环境下脉冲丢失的问题。

M752型驱动器功能简介M752型驱动器,主要驱动57、86型两相混合式步进电机进行高速和高加速度运行,高速性能特佳。
其微步细分数有16种,最大步数为51200Pulse/rev ;其工作峰值电流范围为1.26A -5.2A ,输出电流共有8档,电流的分辨率约为0.5A ;具有自动半流,过压、欠压和过流保护等功能。
本驱动器为直流供电,建议工作电压范围为36VDC -68VDC ,电压不超过75VDC ,不低于20VDC 。
主要应用领域:适合各种中小型自动化设备和仪器,例如:雕刻机、打标机、切割机、激光照排、绘图仪、数控机床、自动装配设备等。
在用户期望小噪声、高速度的设备中应用效果特佳。
驱动器功能操作说明 微步细分数设定 由SW5-SW8四个拨码开关来设定驱动器微步细分数,其共有15档微步细分。
用户设定微步细分时,应先停止驱动器运行。
具体微步细分数的设定,请驱动器面版图说明。
输出电流设定 由SW1-SW3三个拨码开关来设定驱动器输出电流,其输出电流共有8档。
具体输出电流的设定,请驱动器面版图说明。
自动半流功能 用户可通过SW4来设定驱动器的自动半流功能。
off 表示静态电流设为动态电流的一半,on表示静态电流与动态电流相同。
一般用途中应将SW4设成off,使得电机和驱动器的发热减少,可靠性提高。
脉冲串停止后约0.4秒左右电流自动减至一半左右(实际值的60%),发热量理论上减至36%。
信号接口 PUL +和PUL -为控制脉冲信号正端和负端;DIR +和DIR -为方向信号正端和负端;ENA +和ENA -为使能信号的正端和负端。
电机接口 A +和A -接步进电机A 相绕组的正负端;B +和B -接步进电机B 相绕组的正负端。
当A 、B两相绕组调换时,可使电机方向反向。
电源接口采用直流电源供电,工作电压范围建议为36-68VDC ,电源功率大于150W ,电压不超过75VDC和不低于20VDC 。
深圳市研控自动化科技有限公司目录前言 (1)1概述 (2)1.1产品介绍 (2)1.2特性 (2)1.3应用领域 (2)1.4产品命名规则 (3)2性能指标 (4)2.1电气特性 (4)2.2使用环境 (4)3安装 (5)3.1安装尺寸 (5)3.2安装方法 (5)4 驱动器端口与接线 (6)4.1接线示意图 (6)4.2端口定义 (7)4.2.1状态指示灯 (7)4.2.2通讯端口 (7)4.2.3输入/输出端口 (7)4.2.4电源端口 (8)4.2.5拨码开关 (8)4.3输入/输出端口操作 (8)4.4拨码开关设定 (9)5 电机规格及接线 (11)5.1技术规格 (11)5.2电机接线图 (11)6 CANopen协议 (12)6.1 CANopen协议概述 (12)6.1.1 CAN总线与CANopen (12)6.1.2 CANopen功能描述 (12)6.2驱动器控制协议CiA 402 (15)6.2.1 CiA402状态机 (15)6.2.2控制字与状态字 (16)6.2.3工作模式 (17)6.2.4位置模式 (18)6.2.5速度模式 (20)6.2.6回原点模式 (22)7对象字典 (26)8报警排除 (35)9版本修订历史 (36)10保修及售后服务 (37)10.1保修 (37)10.2售后服务 (37)附录1:快速编写运动控制功能块指南 (38)前言感谢您使用本公司总线型步进电机驱动器。
在使用本产品前,请务必仔细阅读本手册,了解必要的安全信息、注意事项以及操作方法等。
错误的操作可能引发极其严重的后果。
声明本产品的设计和制造不具备保护人身安全免受机械系统威胁的能力,请用户在机械系统设计和制造过程中考虑安全防护措施,防止因不当的操作或产品异常造成事故。
由于产品的改进,手册内容可能变更,恕不另行通知。
用户对产品的任何改装我公司将不承担任何责任。
阅读时,请注意手册中的以下标示:注意:提醒您注意文字中的要点。
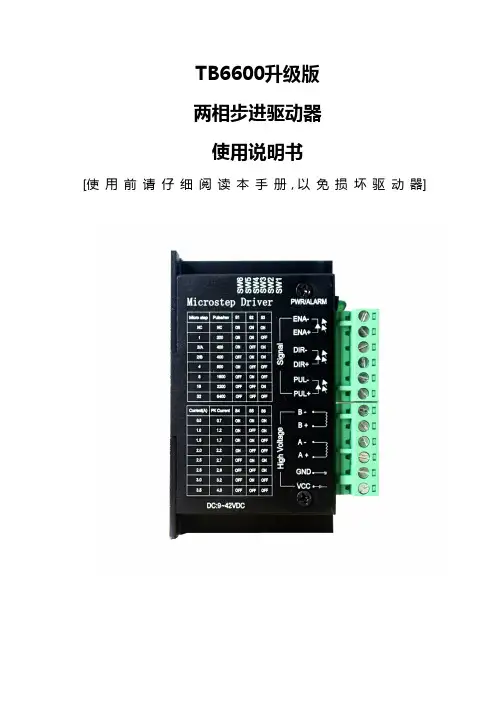
TB6600升级版两相步进驱动器使用说明书[使用前请仔细阅读本手册,以免损坏驱动器]目录一、产品简介 (3)概述 (3)特点 (3)二、接口和接线介绍 (3)信号输入端 (3)电机绕组连接 (3)电源电压连接 (4)状态指示 (4)接线方式 (4)接线要求 (5)三、电流、细分拨码开关设定 (5)细分设定 (5)工作(动态)电流设定 (6)四、机械和环境指标 (6)使用环境及参数 (6)机械安装图 (7)五、电机适配 (7)电机适配 (7)电机接线 (8)供电电压和输出电流的选择 (8)五、常见问题 (9)应用中常见问题和处理方法 (9)六、保修条款 (10)◆概述TB6600升级版驱动器是一款专业的两相混合式步进电机驱动器,可适配国内外各种品牌,电流在4.0A及以下,外径39,42,57mm的四线,六线,八线两相混合式步进电机。
适合各种小中型自动化设备和仪器,例如:雕刻机、打标机、切割机、激光照排、绘图仪、数控机床、拿放装置等。
在用户期望低成本、大电流运行的设备中效果特性。
◆特点※信号输入:单端,脉冲/方向※细分可选:1/2/4/8/16/32细分※输出电流:0.5A-4.0A※输入电压:9-42VDC※静止时电流自动减半※可驱动4,6,8线两相、四相步进电机※光耦隔离信号输入,抗干扰能力强※具有过热、过流、欠压锁定、输入电压防反接保护等功能※体积小巧,方便安装※外部信号3.3-24V通用,无需串联电阻◆信号输入端PUL+ PUL-脉冲输入信号。
默认脉冲上升沿有效。
为了可靠响应脉冲信号,脉冲宽度应大于1.2us。
DIR+ DIR-方向输入信号,高/低电平信号,为保证电机可靠换向,方向信号应先于脉冲信号至少5us建立。
电机的初始运行方向与电机绕组接线有关,互换任一相绕组(如A+、A-交换)可以改变电机初始运行方向。
ENA+ ENA-使能输入信号(脱机信号),用于使能或禁止驱动器输出。
使能时,驱动器将切断电机各相的电流使电机处于自由状态,不响应步进脉冲。
单片机课程设计说明书设计题目:步进电机控制院系:机电汽车工程学院班级:机091-5姓名:xxxxxxx学号:2009xxxxxxxxx指导教师:刘鹏设计日期:2012年06月08日目录一、绪论1.1 设计任务1.2 总体方案二、硬件参数简介2.1 89C512.2 ULN2003A芯片2.3 数码管2.4 步进电机三、步进电机控制系统电路设计3.1 控制电路3.2 最小系统3.3 驱动电路3.4 显示电路3.5 总体电路四、程序设计4.1 方案论证4.2 主程序设计4.3 定时中断设计4.4 外部中断设计4.5 整体程序五、仿真与调试六、设计总结七、分工说明一、绪论1.1设计任务1 、完成单片机与功率驱动电路及小功率步进电机的连接;2 、控制步进电机的转动方向、转动速度及转过指定的角度;3 、通过按键改变电机的转向、转速等参数。
1.2 总体方案单片机控制步进电机,就是利用单片机发出脉冲信号,经过驱动单元驱动步进电机工作,同时可以利用外围电路控制步进电机的状态,显示其工作状态。
本设计采用AT89C51,编程实现P1端四个口循环输出脉冲,用ULN2003放大信号,供给四相电机。
另外,用按键和开关控制P3口定时中断,使其加速、减速、启动、停止和换向。
P0口和P2口输出信号,经数码管显示转向和速度等级。
二、硬件参数简介2.1 89C51AT89C51是一种低功耗/低电压/高性能的8位单片机,其输出引脚指令系统都与MCS-51兼容;片内的Flash ROM允许在系统内改编程序或用常规的非易失控型编程器来编程,内部除CPU外,还包括256字节RAM,四个8位并行I/O口,5个中断源,2个中断优先系统,2个16位可编程定时计数器。
89C51功能强、灵活性高且价格合理,完全可以满足本系统设计需要。
2.2 ULN2003芯片进行信号放大。
ULN2003内部集成了8组达林顿管,驱动负载电流为500mA,驱动电压50V. 八路NPN达林顿连接晶体管阵系列特别适用于低逻辑电平。
DM422S-IO-24(V2.0)使用说明一、功能概述1)DM422S-IO-24(V2.0)是一款调速步进驱动器;2)主要匹配42机座的两相步进电机;3)电压支持直流20~40dcV ,推荐用24Vdc ;电流最大支持2.2A ;4)输入信号24Vdc ;5)3路输入信号,分别定义为启停、正反转、电机使能切换;6)带有1路报警输出,最大饱和输出100mA ,最大耐压30Vdc ;7)3位拨码用来设置电流,8档电流可调;8)3位拨码用来设置速度,具有8档速度可调;9)SW7设置自整定;SW8设置使能锁轴和两段速;10)带有串口,部分参数可调。
二、接口及拨码说明1)信号接口名称功能PUL+启停信号:24Vdc ;悬空时,电机为停止(运行过程中该信号撤销,则减速停止),有信号输入时(PUL+接24V 正,PUL-接24V 负极),电机加速运行到设定速度;PUL-DIR+方向信号:24Vdc ;DIR+,DIR-:悬空时,电机正转,有信号输入时,电机反转,当电机在运行过程中,方向信号发生变化,电机先减速停止,再反向运行到指定速度。
DIR-ENA+使能信号:24Vdc ;有2个功能可选,用拨码11设置。
功能1:此输入信号用于使能或禁止。
使能信号接通时,驱动器将切断电机各相的电流使电机处于自由状态,当不需用此功能时,使能信号端悬空即可功能2:此输入信号用于两段速切换。
两段速切换,(第二段速度是当前速度的固定一半)。
两段速在切换过程中以当前设置的加减速度进行切换运行。
ENA-ALM+报警信号:此信号用于驱动器故障信号输出,为光电隔离OC 输出,最高承受电压30VDC ,最大饱和电流100mA 。
ALM-2)强电接口名称功能GND 电源输入端,电压范围:20VDC~40VDC ,推荐用24Vdc VDC A+、A-电机A 相线圈。
B+、B-电机B 相线圈。
3)拨码功能说明电流设置输出峰值电流输出均值电流SW1SW2SW3说明0.300.21on on on 可以通过串口设置驱动器任意档位的峰值电流,范围可设置0.1-2.2A 。
SSMIntegratedS tep -S ervo M otor步进伺服闭环步进高速大力矩高定位精度多控制模式高响应平滑低噪音节能高效结构紧凑Compliant• 使用预定义的整定参数即可获得最优的性能表现及系统稳定性。
• 根据不同等级的控制要求,提供多种整定参数选择。
• 对于绝大多数应用场合,默认参数即可满足使用,无需手工整定。
反馈全闭环速度力矩位置负载惯量1:10 1:5 1:1energy 简单参数整定低发热/高效率• 在点到点快速定位的运动场合,先进的伺服控制技术提供了大力矩输出,使得系统具有极高动态响应,大大超越了传统步进系统极限。
速度距离高速响应大力矩高速运动监测• 基于5000线高精度编码器的空间矢量电流控制算法,在全速度范围内均有优异的性能表现,即使在低速应用时仍可保持平稳、安静的运行。
------完美解决传统步进电机低速振动噪声问题• 利用高速响应的伺服控制技术升级强化了步进电机固有的刚性特质。
------在运行和静止时都确保定位的精确(20000 脉冲/圈Stepper SSM平滑精确• SSM 始终在全伺服模式下运行,电机的力矩可以被100%充分利用, 系统设计时无需考虑力矩冗余。
• 在大多数应用场合,电机可以输出150%的额定力矩,大力矩输出在某些情况下可以简化减速机构的复杂度。
• 50%过载能力在短距离,高加减速的应用场合将系统优化得更加高效。
• 相对于传统步进系统,先进的伺服控制技术保证了不失步,不卡死, 使得步进电机的高速应用成为可能。
• 对某些实时性运动有极为苛刻精确性要求的应用场合,SSM Quick Tuner 提供了一个简单实用的工具用来监测实际运动轨迹。
• 可用来监测诸如实际速度和位置误差等常用指标,以此评估系统当前实际性能表现。
• 交互式监控与整定结合的界面可以最快地获得最优化的性能输出。
ZHH-MC两相混合式步进电机驱动器使用说明书一、概述ZHH-MC细分型两相混合式步进电机驱动器,采用直流18~50V供电,适合驱动电压24V~50V,电流小于4.2A外径42~86毫米的两相混合式步进电机。
此驱动器采用交流伺服驱动器的电流环进行细分控制,电机的转矩波动很小,低速运行很平稳,几乎没有振动和噪音。
高速时力矩也大大高于其它二相驱动器,定位精度高。
广泛适用于雕刻机、数控机床、包装机械等分辩率要求较高的设备上。
主要特点1平均电流控制,两相正弦电流驱动输出2直流24~50V供电3光电隔离信号输入/输出4有过压、欠压、过流、相间短路保护功能5十六档细分和自动半流功能6八档输出相电流设置7具有脱机命令输人端子8电机的扭矩与它的转速有关,而与电机每转的步数无关9高启动转速10高速力矩大一、电气参数输入电压直流24~50V输入输入电流小于4安培输出电流 1.0A~4.2A功耗功耗:80W;内部保险:6A温度工作温度-10~45℃;存放温度-40℃~70℃湿度不能结露,不能有水珠气体禁止有可燃气体和导电灰尘重量200克注:拨码开关请在未上电时调好,严禁带电操作,切记!二、控制信号接口图1是驱动器的接线原理图1、控制信号定义PLS+:步进脉冲信号输入正端或正向步进脉冲信号输入正端PLS-:步进脉冲信号输入负端或正向步进脉冲信号输入负端DIR+:步进方向信号输入正端或反向步进脉冲信号输入正端DIR-:步进方向信号输入负端或反向步进脉冲信号输入负端ENA+:脱机使能复位信号输入正端ENA-:脱机使能复位信号输入负端脱机使能信号有效时复位驱动器故障,禁止任何有效的脉冲,驱动器的输出功率元件被关闭,电机无保持扭矩。
2、控制信号连接上位机的控制信号可以高电平有效,也可以低电平有效。
当高有效时,把所有控制信号的负端连在一起作为信号地,低有效时,把所有控制信号的正端连在一起作为信号公共端。
现在以集电极开路和PNP输出为例,接口电路示意图如下:图2.输入接口电路(共阴极接法)控制器PNP输出注意:VCC值为5V时,R短接;VCC值为12V时,R为1K,大于1/8W电阻;VCC值为24V时,R为2K,大于1/8W电阻;R必须接在控制器信号端。