智能汽车路径识别中的图象处理算法
- 格式:pdf
- 大小:1.65 MB
- 文档页数:2
基于深度学习的自动驾驶车辆路径规划策略研究自动驾驶车辆是当今科技发展的热点,是人类智慧和技术的结晶。
自动驾驶车辆让我们看到了无尽的可能。
而自动驾驶车辆的核心之一就是路径规划,它的好坏直接关系到车辆能否更好地完成自动驾驶任务和行驶的安全性。
因此基于深度学习的自动驾驶车辆路径规划策略研究是非常有价值的。
一、深度学习在自动驾驶车辆路径规划中的应用深度学习是一种人工智能的分支学科,具有自适应和自我进化的能力,已经在语音识别、图像识别、自然语言处理等许多领域取得了很好的应用效果。
在自动驾驶车辆领域,深度学习可以应用于辅助驾驶、安全监控、交通流量预测、驾驶行为分析、路径规划等众多领域。
在自动驾驶车辆路径规划中,深度学习能够进行数据驱动型的路径规划,通过学习大量实际数据,建立深度神经网络模型,从而实现路径规划。
深度学习技术可以从历史数据中学习汽车驾驶的技能,学习如何选择道路、避免障碍物、跟随车辆和保持航向等行为。
因此,深度学习在自动驾驶车辆路径规划中的应用非常广泛。
二、深度学习在自动驾驶车辆路径规划中的优化深度学习在自动驾驶车辆路径规划中的应用,还可以与其他技术结合,进行更好的优化。
1. 地图数据优化在自动驾驶车辆路径规划中,地图数据是非常重要的。
通过深度学习技术可以对地图数据进行优化和更新。
深度学习技术可以通过分析历史数据,提取道路的特征,将道路分为不同的类型,从而优化地图数据的准确性和细节性。
2. 传感器数据优化在自动驾驶车辆中,各种传感器收集到的数据,包括摄像机、雷达、超声波和激光雷达等,都可以用于路径规划。
深度学习可以通过对传感器数据进行深度处理和学习,快速准确地检测道路状况,并估算驾驶员的难度。
通过这种方式可以让自动驾驶车辆更好的适应复杂地形,规划最佳路径。
3. 反应时间预测在路径规划过程中,反应时间是一个非常重要的因素。
深度学习技术可以从历史数据中学习驾驶员的习惯和反应时间,根据车辆的速度、行驶环境和传感器数据等建立模型,预测驾驶员的反应时间。
⾛进智能⽹联汽车环境感知技术环境作为智能⽹联汽车的基础,同时也是智能驾驶的四⼤核⼼技术(环境感知、精确定位、路径规划和线控执⾏)之⼀,环境感知技术利⽤传感器获取道路、车辆位置和障碍物信息,并将这些信息传输给车载控制中⼼,为智能⽹联汽车提供决策依据,是智能驾驶汽车的“通天眼”。
感知环境感知技术应⽤在智能⽹联汽车的各个⾓落环境感知系统组成环境感知系统由信息采集单元、信息处理单元和信息传输单元组成。
系统基于单⼀传感器、多传感器信息融合或车载⾃组织⽹络获取周围环境和车辆的实时信息,经信息处理单元根据⼀定算法识别处理后,通过信息传输单元实现车辆内部或车与车之间的信息共享。
常见的环境感知传感器有超声波传感器、毫⽶波雷达、激光雷达和视觉传感器等,各传感器的原理和特点不同,在环境感知技术中的使⽤也不同。
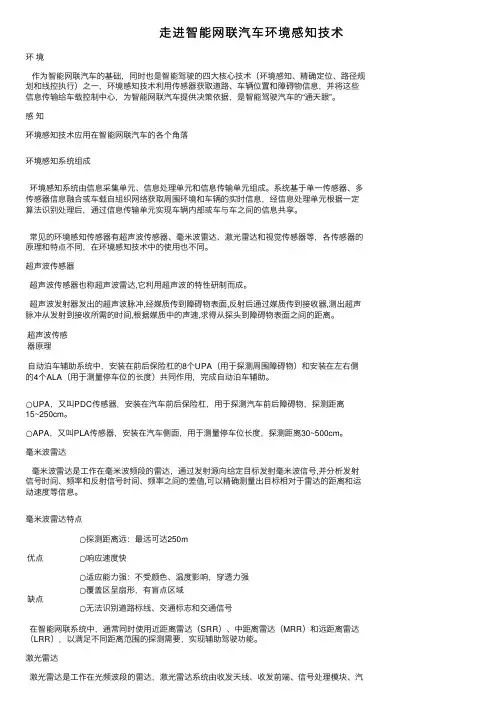
超声波传感器超声波传感器也称超声波雷达,它利⽤超声波的特性研制⽽成。
超声波发射器发出的超声波脉冲,经媒质传到障碍物表⾯,反射后通过媒质传到接收器,测出超声脉冲从发射到接收所需的时间,根据媒质中的声速,求得从探头到障碍物表⾯之间的距离。
超声波传感器原理⾃动泊车辅助系统中,安装在前后保险杠的8个UPA(⽤于探测周围障碍物)和安装在左右侧的4个ALA(⽤于测量停车位的长度)共同作⽤,完成⾃动泊车辅助。
○UPA,⼜叫PDC传感器,安装在汽车前后保险杠,⽤于探测汽车前后障碍物,探测距离15~250cm。
○APA,⼜叫PLA传感器,安装在汽车侧⾯,⽤于测量停车位长度,探测距离30~500cm。
毫⽶波雷达毫⽶波雷达是⼯作在毫⽶波频段的雷达,通过发射源向给定⽬标发射毫⽶波信号,并分析发射信号时间、频率和反射信号时间、频率之间的差值,可以精确测量出⽬标相对于雷达的距离和运动速度等信息。
毫⽶波雷达特点优点○探测距离远:最远可达250m○响应速度快○适应能⼒强:不受颜⾊、温度影响,穿透⼒强缺点○覆盖区呈扇形,有盲点区域○⽆法识别道路标线、交通标志和交通信号在智能⽹联系统中,通常同时使⽤近距离雷达(SRR)、中距离雷达(MRR)和远距离雷达(LRR),以满⾜不同距离范围的探测需要,实现辅助驾驶功能。

0引言随着人们生活水平的稳步提升,汽车作为日常代步工具早已进入千家万户。
汽车在给予生活便利的同时也引发了诸多社会问题,例如交通拥堵、环境污染等。
对智能车的研究可以有效的改善尾气排放、交通堵塞等问题。
而路径跟踪作为智能车辆的一项关键技术,是世界上许多汽车主机厂一直以来研究的重点。
路径跟踪主要是运用各种算法设计控制器,使得车辆在精确跟踪期望路径的同时保证车辆的横向稳定性。
目前路径跟踪运用较为广泛的算法有PID控制、模糊控制、鲁棒控制、滑模控制、模型预测控制等。
邵俊凯等[1]设计了基于强化学习的自适应PID路径跟踪控制器,用于无人驾驶铰链式车辆的路径跟踪。
王家恩等[2]人以横向偏差及其变化率作为模糊控制器的输入,得到了车辆前轮转角,从而控制车辆沿着期望路径运动。
武星等[3]提出了一种基于双视野窗口的鲁棒特征识别与路径跟踪方法,该方法改善了检测系统的实时性。
李兵等[4]将滑模算法和RBF神经网络算法相结合,设计了路径跟踪控制器。
日本的Yakub Fitri等[5]采用模型预测(MPC)控制,解决了四轮转向汽车在高速行驶工况下的路径跟踪问题。
文章首先对路径跟踪相关模型做出介绍,随后通过对基于LQR的路径跟踪控制器的设计过程和各种期望路径信息的呈现,表明该控制方法的优缺点。
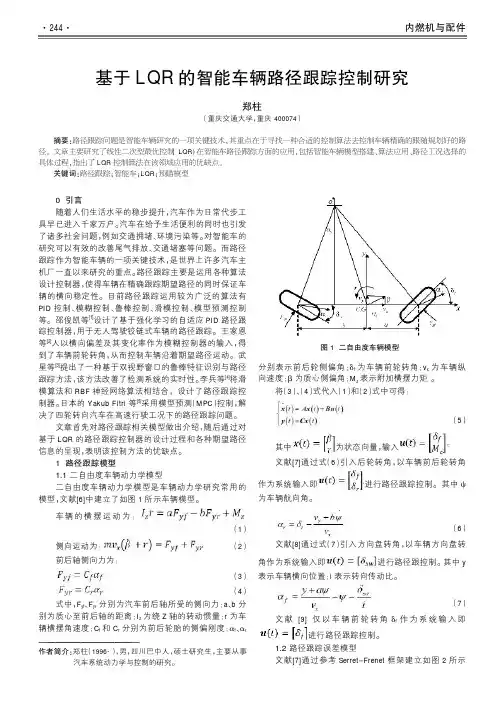
1路径跟踪模型1.1二自由度车辆动力学模型二自由度车辆动力学模型是车辆动力学研究常用的模型,文献[6]中建立了如图1所示车辆模型。
车辆的横摆运动为:(1)侧向运动为:(2)前后轴侧向力为:(3)(4)式中,F yf、F yr分别为汽车前后轴所受的侧向力;a、b分别为质心至前后轴的距离;I z为绕Z轴的转动惯量;r为车辆横摆角速度;C f和C r分别为前后轮胎的侧偏刚度;αf、αr 分别表示前后轮侧偏角;δf为车辆前轮转角;v x为车辆纵向速度;β为质心侧偏角;M z表示附加横摆力矩。
将(3)、(4)式代入(1)和(2)式中可得:(5)其中为状态向量,输入文献[7]通过式(6)引入后轮转角,以车辆前后轮转角作为系统输入即进行路径跟踪控制。
深度学习在人工智能中的应用和原理是什么深度学习是人工智能领域的一个重要分支,它致力于模拟人脑的神经网络结构和学习方式,通过构建多层神经网络来处理和解决复杂的问题。
深度学习已经取得了很多在图像识别、语音识别、自然语言处理等领域的突破性成果,并且正在逐渐影响和改变人类社会的方方面面。
深度学习的应用非常广泛,下面我们来具体探讨一下深度学习在人工智能领域的几个主要应用。
一、图像识别图像识别是深度学习的一个重要应用方向。
通过深度学习,可以让计算机模拟人类大脑的视觉系统,能够对图片进行分析、识别出其中的物体和场景,并进行分类。
例如,在自动驾驶领域,深度学习可以帮助汽车识别出道路上的车辆、行人和交通标志,从而做出相应的决策。
此外,深度学习还可以应用于医学影像诊断、安防监控等领域。
二、语音识别语音识别是指将语音信号转换为文本的过程。
深度学习在语音识别领域表现出了强大的能力。
通过深层神经网络的构建和训练,可以对复杂的语音信号进行建模,从而实现高准确率的语音识别。
目前,深度学习已经成功应用于智能助手(比如苹果的Siri和亚马逊的Alexa)以及电话客服等领域,极大地提升了语音识别的性能。
三、自然语言处理深度学习在自然语言处理方面也有广泛的应用。
自然语言处理是指让计算机理解和处理人类自然语言的过程。
通过深度学习,可以让计算机更好地理解和处理文本、翻译、回答问题等。
例如,在机器翻译领域,深度学习可以通过构建序列到序列的神经网络模型,将一种语言的文本自动翻译成另一种语言的文本。
四、推荐系统深度学习在推荐系统中也有很多应用。
推荐系统是指根据用户的历史行为和偏好,向用户推荐其可能感兴趣的物品。
通过深度学习,可以提取出用户和物品之间的特征,通过建立深度神经网络模型来预测用户对物品的偏好。
这样可以实现更加准确和个性化的推荐。
五、机器人控制深度学习在机器人控制领域也有很多应用。
通过深度学习,可以让机器人具备更加智能的感知和决策能力。
模式识别技术在自动驾驶系统中的应用自动驾驶技术是近年来互联网与人工智能融合发展的重要成果,其潜力和前景引起了广泛的关注和兴趣。
而在自动驾驶系统中,模式识别技术的应用起到了至关重要的作用。
本文将探讨模式识别技术在自动驾驶系统中的应用,包括模式识别技术的工作原理、应用场景以及所带来的优势和挑战。
首先,我们来了解一下模式识别技术的工作原理。
模式识别技术是指通过计算机算法和机器学习方法,从大量的数据中寻找特定的模式或规律。
在自动驾驶系统中,模式识别技术可以分析和理解道路上的各种场景和情况,帮助汽车自主决策和行驶。
在自动驾驶系统中,模式识别技术可以应用于多个方面。
首先,模式识别技术可以用于图像识别和分析。
通过分析车载摄像头拍摄的图像,模式识别技术可以识别道路标志、交通信号灯、行人和其他车辆等,从而对车辆的位置、速度和行驶路径进行准确判断。
其次,模式识别技术还可以用于语音识别和理解。
通过识别驾驶员的指令和语音交流,系统可以实现自然语言的交互和响应。
此外,模式识别技术还可以应用于运动轨迹和行为模式分析,通过对车辆的运动轨迹和行为模式进行分析,模式识别技术可以提前预测可能的危险场景,从而避免事故的发生。
模式识别技术在自动驾驶系统中的应用具有很多优势。
首先,模式识别技术可以实现准确和高效的场景和目标识别。
通过深度学习和神经网络等技术的发展,模式识别技术在识别准确度和速度方面均取得了很大的突破,使得自动驾驶系统能够快速而准确地识别和理解道路上的情况。
其次,模式识别技术可以提升自动驾驶系统的安全性和可靠性。
通过对不同场景和情况的识别和分析,系统可以在遇到危险或复杂情况时做出相应的决策和应对措施。
此外,模式识别技术还可以提高驾驶体验和乘坐舒适度。
例如,通过对驾驶员的面部表情和眼神进行分析,系统可以了解驾驶员的疲劳程度,并提醒驾驶员进行休息或调整。
然而,模式识别技术在自动驾驶系统中的应用也面临着一些挑战。
首先,模式识别技术对于复杂环境和情况的识别和理解仍然存在一定的困难。

第13卷㊀第8期Vol.13No.8㊀㊀智㊀能㊀计㊀算㊀机㊀与㊀应㊀用IntelligentComputerandApplications㊀㊀2023年8月㊀Aug.2023㊀㊀㊀㊀㊀㊀文章编号:2095-2163(2023)08-0205-05中图分类号:TP391文献标志码:A基于UNet模型的赛道识别算法研究徐㊀威,于海滨,余胤翔,巩荣芬(辽宁科技大学电子与信息工程学院,辽宁鞍山114051)摘㊀要:随着赛道识别问题不断升级,赛道识别的精确度需求大大提升,传统的赛道识别方法受环境变化的影响大㊂近几年来,深度学习方法在赛道识别方面也取得了很好的效果㊂本文就赛道识别问题提出了一种基于Keras的UNet模型的赛道识别方法,该方法是对赛道图像根据UNet模型训练结果进行分割,并用细化算法来识别中线,由此判断小车接下来的行径㊂最后,经实际对比实验测试,新方法识别时效性一般,识别准确率高㊂关键词:UNet模型;赛道识别;细化算法;深度学习ResearchontrackrecognitionalgorithmbasedonUNetmodelXUWei,YUHaibin,YUYinxiang,GONGRongfen(SchoolofElectronicsandInformationEngineering,LiaoningUniversityofScienceandTechnology,AnshanLiaoning114051,China)ʌAbstractɔWiththecontinuousupgradingoftrackrecognitionissues,itisrequiredtogreatlyimprovetheaccuracyoftrackrecognition,andtraditionaltrackrecognitionmethodsaresignificantlyaffectedbyenvironmentalchanges.Inrecentyears,deeplearningmethodshavealsoachievedgoodresultsintrackrecognition.ThisarticleproposesaracetrackrecognitionmethodbasedonKerasᶄsUNetmodelforracetrackrecognition.ThismethodsegmentstheracetrackimagebasedonthetrainingresultsoftheUNetmodel,andusesathinningalgorithmtoidentifythecenterlinefordeterminingthenextbehaviorofthecar.Finally,throughactualcomparativeexperimentaltesting,thenewmethodhasaveragerecognitiontimelinessandhighrecognitionaccuracy.ʌKeywordsɔUNetmodel;trackrecognition;refinementalgorithm;deeplearning基金项目:大学生创新创业训练计划项目(S202210146037)㊂作者简介:徐㊀威(2002-),男,本科生,主要研究方向:机器视觉;于海滨(2002-),男,本科生,主要研究方向:嵌入式;余胤翔(2002-),男,本科生,主要研究方向:嵌入式软件和机器视觉;巩荣芬(1979-),女,博士,副教授,主要研究方向:模式识别㊁机器学习㊂通讯作者:巩荣芬㊀㊀Email:1161555381@qq.com收稿日期:2023-01-110㊀引㊀言近些年,智能汽车获得了迅猛发展,陆续涵盖了工程控制㊁信息与通信㊁模式识别㊁传感技术㊁电气工程㊁计算机等多个学科及领域㊂研究可知,智能汽车技术在交通运输㊁智能驾驶等方面有着广阔的应用前景与发展空间[1]㊂智能汽车的核心部分是赛道元素识别㊁方向和速度控制,精准的赛道元素识别算法是方向和速度控制的基础和前提,尤其是面对复杂路况时赛道的识别是系统设计的难点[2]㊂智能小车相比于真实汽车有着专属的特点和用途,智能小车具有机械结构简单轻便㊁驾驶模式低速安全㊁整车易于改造实现等特点,可以用于智能汽车核心控制系统的研发设计[3]㊂最近几年,深度学习方法在赛道识别方面也取得了很好的效果㊂这些方法可以自动学习特征,从而更加精确地识别出赛道㊂本文就智能小车的赛道识别问题提出了一种基于Keras的UNet模型的识别方法,可对逐帧图像进行识别处理,划出中线集,来判断道路状况,以此来实现对赛道元素的精准识别㊂1㊀传统赛道识别现状赛道识别是从图像或视频数据中准确识别出赛道,这是自动驾驶㊁机器视觉和计算机视觉等领域的基础㊂目前,赛道识别研究已经较为成熟,其中一些传统的赛道识别方法包括颜色分割㊁特征提取㊁边缘检测算法㊂最近几年,深度学习的赛道识别方法也取得了很好的效果㊂这些方法可以实现自动学习特征,以此更加准确地识别出赛道㊂为了更准确㊁更快速地对赛道进行识别,需要结合深度学习和计算机视觉等技术进行改进㊂2㊀赛道识别实现思路2.1㊀基于UNet模型的赛道识别算法基于UNet模型的赛道识别算法主要可以分成2个部分㊂第一部分是对输入进的图像根据网络训练出的结果进行预测,将图像分割成背景和赛道两部分;第二部分是对赛道部分进行细化算法求取中点集㊂最后,根据中点集就可以预测智能车未来的行径㊂2.2㊀UNet模型实现UNet是一种用于图像分割任务的卷积神经网络模型㊂由Ronneberger等学者在2015年提出,并广泛应用在医学图像分割领域㊂该模型的特点是具有对称的U形结构[4],其中包含一个下采样路径和一个上采样路径,使得在保持空间分辨率的同时,能够对图像进行有效的语义分割㊂UNet的训练过程通常使用交叉熵损失函数,并且可以使用数据增强技术来增加数据的多样性㊂该模型在医学图像分割方面的应用,不仅能够对肿瘤和器官进行有效的分割,而且在其他领域㊁如自然图像分割和道路分割等方面也取得了可观成果㊂2.2.1㊀主干特征提取采用的主干特征提取网络为VGG16㊂VGG16总共有16层,包括13个卷积层和3个全连接层㊂第1次经过64个卷积核的2次卷积后,采用1次pooling,第2次再经过2次128个卷积核卷积后,再采用pooling,再重复2次3个512个卷积核卷积后,再采用pooling,最后经过3次全连接[5]㊂224?224?3224?224?64112?112?12856?56?25628?28?51214?14?5127?7?5121?1?40961?1?40961?1?10001?1?1000F CC o n vM a x p o o l图1㊀VGG16结构图Fig.1㊀StructurediagramofVGG16㊀㊀利用VGG16提取后的卷积层和最大池化层,经过图2的卷积及池化操作后,获得5个初步的有效特征层㊂i n p u t (512,512,3)蜜C o n v 2d f i l t e r s =64(512,512,64)C o n v 2d f i l t e r s =64(512,512,64)M a x p o o l i n g s =2(256,256,64)蜜C o n v 2d f i l t e r s =128(256,256,128)C o n v 2d f i l t e r s =128(256,256,128)M a x p o o l i n g s =2(128,128,128)蜜C o n v 2d f i l t e r s =256(128,128,256)C o n v 2d f i l t e r s =256(128,128,256)C o n v 2d f i l t e r s =256(128,128,256)M a x p o o l i n g s =2(64,64,256)蜜C o n v 2d f i l t e r s =512(64,64,512)C o n v 2d f i l t e r s =512(64,64,512)C o n v 2d f i l t e r s =512(64,64,512)M a x p o o l i n g s =2(32,32,512)蜜C o n v 2d f i l t e r s =512(32,32,512)C o n v 2d f i l t e r s =512(32,32,512)C o n v 2d f i l t e r s =512(32,32,512)f 1f 2f 3f 4f 5图2㊀有效特征层示意图Fig.2㊀Schematicdiagramoftheeffectivefeaturelayer2.2.2㊀主干特征提取经过主干特征提取网络,可以获得5个初步的有效特征层,在加强特征提取网络过程中,会利用这5个初步的有效特征层进行特征融合[6],特征融合的方式就是对特征层进行上采样后㊁再进行堆叠㊂为了方便网络的构建与呈现出更好的通用性,在上采样时直接进行2倍上采样再进行特征融合,最终获得的特征层和输入图片的高宽相同㊂2.2.3㊀Loss解析Loss解析是指对一个神经网络模型的训练过程中,计算出的误差损失值进行分析和解释㊂可以帮助了解模型的训练效果和优化方向,从而更好地调整模型参数,提升模型性能㊂本文使用的Loss由CrossEntropyLoss和DiceLoss两部分组成㊂CrossEntropyLoss就是交叉熵损失,在对像素点进行分类时使用[7]㊂DiceLoss将语义分割的评价指标作为Loss,Dice系数是一种用于度量2个样本相似度的指标,常用于自然语言处理中的文本匹配任务㊂是用来测量2个样本中共同出现的元素或特征的比例,取值范围在[0,1]㊂其值可用如下公式进行计算:602智㊀能㊀计㊀算㊀机㊀与㊀应㊀用㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第13卷㊀s=2xɘyx+y(1)2.2.4㊀预测结果获得特征层后,就可以利用输入进来的图片特征预测结果,使用1ˑ1的卷积进行通道调整㊂2.3㊀细化算法实现细化算法是一种图像处理算法,现已广泛应用于数字图像处理领域㊂算法可以将图像中的线条或轮廓进行细化,以达到消除噪声㊁减少数据冗余等目的㊂细化算法在很多应用领域都有着重要的作用,例如医学图像处理㊁指纹识别㊁人脸识别等㊂细化算法是一个迭代算法,整个迭代过程分为2部分,对图像的像素进行处理㊂数学方法公式分别见如下:2ɤNP1()ɤ6SP1()=1P2∗P4∗P6=0P4∗P6∗P8=0ìîíïïïï(2)2ɤNP1()ɤ6SP1()=1P2∗P4∗P8=0P2∗P6∗P8=0ìîíïïïï(3)㊀㊀其中,N(P1)表示与P1相邻的8个像素点中,为实景像素点的个数;S(P1)表示像素中出现0 1的累计次数[7],0为背景,1为实景㊂符合上述全部算法时该格子的算法为1,并且根据这2个部分进行迭代,直到结果不再变化为止㊂最后的结果就是细化算法后的骨架㊂3㊀数据集处理3.1㊀数据集构建UNet的工作实际上就是对图片的每个像素点进行分类,以此来对各像素点位的每个类别概率进行预测㊂UNet模型训练用的数据集,采用VOC的格式,分为2部分,第一部分是原图,为RGB图像[高,宽,3];第二部分是标签,为灰度图图像[高,宽]㊂原图和标签的数据集图片如图3所示,是239个原图与标签图㊂3.2㊀数据增强为了扩大样本的数据量,需提高模型在复杂环境下的准确性和泛化能力㊂本文对数据集下的图像进行了改变亮度㊁锐化处理,模糊处理等操作㊂改变亮度㊁锐化处理㊁模糊处理后的图像数据,可以模拟出赛道在不同光照强度下的场景㊂对原图的亮度处理是在(-40,40)的范围内随机加减,通过对每个像素点加减值,来达到改变图像亮度的效果;对原图的锐化处理是增强图像的边缘对比度,需要先对图像进行高通滤波处理[8],来突出其特征边缘,再对特征边缘在(1.1,1.3)范围内做随机倍数加强;对原图的模糊处理上是随机添加均值为0㊁方差为1的高斯噪声[9]㊂原图和标签的数据集图片如图4所示㊂180.j p g 185.j p g 190.j p g 195.j p g 181.j p g 186.j p g 191.j p g 196.j p g 182.j p g 187.j p g 192.j p g 197.j p g 183.j p g 188.j p g 193.j p g 198.j p g 184.j p g189.j p g194.j p g199.j p g 220.p n g 225.p n g 230.p n g 235.p n g 221.p n g 226.p n g 231.p n g 236.p n g 222.p n g 227.p n g 232.p n g 237.p n g 223.p n g 228.p n g 233.p n g 238.p n g 224.p n g229.p n g234.p n g239.p n g图3㊀原图和标签的数据集图片Fig.3㊀Datasetimageoftheoriginalimageandlabels(a)原图㊀㊀㊀㊀㊀㊀㊀(b)改变亮度㊀㊀㊀㊀㊀㊀㊀(c)锐化处理㊀㊀㊀㊀㊀㊀(d)模糊处理图4㊀数据集增强Fig.4㊀Datasetenhancement702第8期徐威,等:基于UNet模型的赛道识别算法研究4㊀实验与结果分析4.1㊀试验平台在Windows10系统下,CUDAv10.0,cuDNN7.5.0,运用Python3.6.4语言进行编译,基于Tensorflow2.6.2下的Keras2.6.0框架下搭建的,在VSCode2021下运行㊂4.2㊀识别效果使用基于UNet模型的赛道识别算法,对输入视频的每一帧进行识别,选取其中一帧,识别效果如图5所示㊂㊀㊀(a)原图㊀㊀㊀㊀㊀㊀㊀(b)语义分割㊀㊀㊀㊀㊀㊀(c)细化处理㊀㊀㊀㊀㊀㊀(c)可视化㊀㊀图5㊀识别效果图Fig.5㊀Recognitionrendering4.3㊀时效性分析本文对算法进行了测试,选取了30帧的视频作为检测对象,记录每一帧下的频率,画出时效性分析图来体现基于UNet模型的赛道识别算法的时效性㊂时效分析结果如图6所示㊂6.56.05.55.04.54.03.53.02.52.0051015202530帧f p s 图6㊀时效分析图Fig.6㊀Aginganalysis4.4㊀准确度分析本文为了验证基于UNet模型的赛道识别的准确性,与传统赛道识别算法进行结果比对㊂对于传统赛道识别算法,研究中采用的是颜色分割和边缘检测的方法㊂实验时对相同的赛道视频进行识别,并对其输出的中点集与正确中点集进行比较㊂为了加强准确度分析的严密性,研究采取分别对其在不同环境情况下(低光照㊁正常光照㊁高光照)的8张赛道图片进行识别,对输出的中点集使用编辑距离算法,计算与实际中点集的误差,公式具体如下:f(i,j)=㊀max(i,j)㊀㊀㊀㊀㊀㊀㊀㊀ifmin(i,j)=0minf(i-1,j)+1f(i,j-1)+1f(i-1,j-1)+1(aiʂbj)ìîíïïïifmin(i,j)ʂ0ìîíïïïï(4)㊀㊀其中,a,b是2个数组,f(i,j)是a中的前i个字符和b中前j个字符的编辑距离㊂研究得到的识别偏差结果对比见表1㊂表1㊀识别偏差结果对比表Tab.1㊀Comparisontableofidentificationbiasresults序号低光照传统法误差/像素新法误差/像素正常光照传统法误差/像素新法误差/像素高光照传统法误差/像素新法误差/像素1472555412124724354521316153315144472211845195452399351962919661410716712621784124373120平均偏差3617.75.85.430.914.6(下转第213页)802智㊀能㊀计㊀算㊀机㊀与㊀应㊀用㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第13卷㊀障类型,模拟正常㊁滚珠故障㊁内圈故障㊁外圈故障,将预先设置故障的轴承安装到智能小车的驱动轴进行测试,采集驱动轴轴承的振动信号数据,该方法先将不同故障类型的时域振动信号进行EMD分解,再提取训练样本数据中不同维数的能量作为特征向量㊁选用径向基核函数方法建立SVM模型,最后对测试样本数据中的特征向量进行故障识别㊂试验结果表明,在本文中人工模拟滚动轴承故障类型经过EMD-SVM分类后平均分类准确率达到93.75%,能够准确识别轴承的不同故障类型,为轴承的早期故障提供参考㊂参考文献[1]郭志超,朱敏,王荟荟.EMD-SVM结合对风机齿轮箱振动检测与故障诊断[J].郑州师范教育,2020,9(04):6-9.[2]刘剑生,王细洋.基于EMD与BP神经网络的齿轮故障诊断[J].失效分析与预防,2020,15(06):370-375,392.[3]钟岳,王钊,方虎生,等.基于EMD-SVD的液压系统故障模糊聚类研究[J].机电工程技术,2020,49(11):104-108.[4]陈之恒,宋冬利,张卫华,等.基于EMD及改进PSO_BP的电机轴承故障诊断[J].测控技术,2020,39(11):33-38,125.[5]唐静,王二化,朱俊,等.基于EMD和SVM的齿轮裂纹故障诊断研究[J].机床与液压,2020,48(14):200-204.[6]贺志晶,王兴,李凯,等.基于FIR-EMD和改进SVM的铁路轴承故障诊断[J].噪声与振动控制,2017,37(02):143-147.[7]彭松,黄志辉,胡奇宇.基于EMD与SVM的地铁列车滚动轴承故障诊断方法分析[J].科技创新与应用,2016(23):36.[8]VAPNIKV.Natureofstatisticallearningtheory[M].US:SpringerScience&BusinessMedia,1999.[9]王红军,徐小力.支持向量机在设备故障诊断方面的应用研究概述[J].机械设计与制造,2005(09):157-159.[10]马玉猛.基于EMD和PSO-SVM的通用航空飞机燃油流量预测[J].滨州学院学报,2022,38(04):20-24.[11]陈炳光.基于EMD和SVM煤矿通风机轴承故障诊断的研究[D].徐州:中国矿业大学,2018.(上接第208页)5 结束语本文针对赛道识别问题,提出了一种基于UNet模型的赛道识别方法,使用UNet模型分割后的掩码图像提取赛道的边缘信息,再用细化算法求取中点集㊂本文对UNet模型的框架和原理进行了简单阐述,并通过时效性分析,发现了模型存在的初始运行慢问题,通过准确度分析实验,发现相比于传统赛道识别方法,本文方法在不同环境下的赛道识别有了很大的提升㊂后续需要继续研究结构和算法的改进,进一步提升新方法的时效性和准确率㊂参考文献[1]黄俊嘉,余志贤,陈锐,等.基于特征分类的智能汽车赛道元素识别算法[J].计算机产品与流通,2018(03):127,129.[2]吴绪辉,潘璇峰,邓伟杰.基于图像分割匹配的赛道元素识别算法[J].物联网技术,2019,9(11):25-27.[3]俞洋,李峰,缪奕扬.基于机器视觉的全元素赛道智能小车实验系统设计与应用[J].中南民族大学学报(自然科学版),2022,41(06):689-696.[4]柴志忠.基于深度卷积神经网络的病理影像研究[D].厦门:厦门大学,2019.[5]王宁.基于改进YOLO网络与极限学习机的绝缘子故障检测[D].大庆:东北石油大学,2021.[6]韩俊文.基于OpenCV3的焊缝轨迹识别系统[J].电子技术与软件工程,2018(18):43-44.[7]徐奎奎.基于深度学习的合金组织缺陷检测及应用研究[D].石家庄:河北经贸大学,2022.[8]姜萍萍,颜国正,丁国清,等.一种便携式工业视频内窥镜的开发[J].光学精密工程,2002(04):407-410.[9]汪欢.无源毫米波图像序列超分辨重建算法研究[D].成都:电子科技大学,2014.[10]李易.多类型车道线的检测与识别方法研究[D].西安:西安石油大学,2021.312第8期李志伟,等:轴承故障诊断特征提取方法研究。
基于深度学习的无人驾驶汽车路径规划研究摘要:得益于深度学习和人工智能领域的进步,自动驾驶技术在过去十年中快速发展。
本文调查研究了无人驾驶汽车领域使用的最新深度学习技术。
我们首先介绍基于 AI 的无人驾驶汽车决策系统和卷积神经网络。
这些方法构成了路径规划和行为仲裁算法的基础。
本次调查研究提供的比较有助于深入了解深度学习和人工智能方法在自动驾驶方面的优势和局限性,有助于路径规划算法的设计选择。
列入沧州市科技技术局项目《基于深度学习的无人驾驶汽车路径规划研究》,项目编号:2041020181简介在过去十年的过程中,深度学习和人工智能在计算机视觉、机器人技术和自然语言处理 (NLP) 等技术中得到了广泛应用。
它们还对无人驾驶汽车产生了重大影响。
无人驾驶汽车已开始从在实验室开发和测试转移到在公共道路上行驶和应用。
无人驾驶汽车在实际场景中的应用减少了道路事故和交通拥堵,并改善了我们在过度拥挤的城市中的流动性。
无人驾驶将驾驶的任务完全交给机器,也叫自动驾驶。
“自动驾驶”这个名称看似不言自明,但实际上有五个 SAE Level 用于定义自动驾驶。
SAE J3016 标准 [1] 引入了从 0 到 5 的等级,用于对车辆自动化进行分级。
较低的 SAE 级别具有基本的驾驶员辅助功能,而较高的SAE 级别则适用于不需要任何人工交互的车辆。
5 级类别的汽车不需要人工输入,通常甚至没有方向盘或脚踏板。
虽然大多数驾驶场景可以通过经典的感知、路径规划和运动控制方法相对简单地解决,但其余未解决的场景是传统方法失败的极端情况。
1994 年,VaMP 无人驾驶汽车成功行驶 1,600 公里,其中 95% 是自动驾驶。
自动驾驶的另一个重要里程碑是 2004 年和 2005 年的 DARPA 大挑战赛以及2007 年的 DARPA 城市挑战赛。
比赛的目标是让无人驾驶汽车在没有人工干预的情况下尽可能快地在越野路线上行驶。
Stanley 是 2005 年比赛的获胜者,他利用机器学习技术在非结构化环境中导航。
摘要摘要自动驾驶是目前科技领域的一个前沿热点技术,在谷歌、特斯拉、Uber等科技公司的刺激下,科研机构和汽车制造厂商纷纷调配资源来加快该技术相关的研发工作。
路径规划技术是自动驾驶系统中必不可少的技术模块。
路径规划依赖于高精度地图,规划车体行驶的最优路线,实现从起始点到目标点的任务需求。
路径规划技术也被广泛运用在游戏线路搜索、扫地机器人、物流配送、仓储巡检等场景中,因此便需要路径规划算法能够适应更为复杂的环境地图,同时又能节省时间成本。
从算法本身特点及环境复杂度出发,采取对单一算法的改进和多种算法的融合方法,对路径规划技术的研究具有重要意义。
本文从全局路径规划和局部路径规划两部分着手,分别对这两部分的算法进行研究。
根据全局路径规划A*算法的原理,仿真对比了A*算法中常用的四种不同启发函数的寻路效果,同时提出一种改进的加权曼哈顿距离启发函数,仿真验证该启发函数提高了A*算法的寻路效率,在搜索到的路径长度,搜索时间和搜索的结点数量方面均具有优越性;根据局部路径规划DWA算法的原理,对该算法评价函数中三项评价指标的权重值如何选取进行了仿真分析,通过将采用加权曼哈顿距离的A*算法和DWA算法融合,使融合后的算法尽可能贴近全局最优路径,有效避免了DWA算法容易陷入局部最优的缺点,同时缩短了算法的运行时间。
根据自动驾驶系统的关键技术组成,对机器人底盘和激光雷达进行选型,搭建了无人车硬件平台;以ROS系统的工作框架和基本特点为基础,对导航包组织框架各模块作用的详细分析,研究了move_base包进行路径规划算法验证的具体方法,配置了本文研究的算法插件和机器人可视化模型;实验部分通过对move_base包中关键参数的配置,分别搭建静态和动态实验环境,完成路径规划的实验验证与结果分析,证明本文研究的算法具有一定的实用性。
关键词:全局规划,局部规划,ROS,最优路径,运行时间AbstractAbstractAutonomous driving is a hot frontier technology in the field of science and technology at present. Spurred by Google, tesla, Uber and other technology companies, scientific research institutions and automobile manufacturers have deployed resources to accelerate the research and development related to this technology. Path planning technology is an essential technology module in the automatic driving system. Path planning relies on high-precision map to plan the optimal route for the vehicle, so as to achieve the task requirements from the starting point to the target point. Path planning technology is also widely used in game route search, sweeping robot, logistics distribution, warehouse inspection and other scenarios. Therefore, path planning algorithm is required to be able to adapt to more complex environment map and save time cost. Starting from the characteristics of the algorithm itself and the complexity of the environment, it is of great significance to study the path planning technology by improving the single algorithm and integrating multiple algorithms.This paper studies the algorithms of global path planning and local path planning respectively. According to the principle of global path planning A* algorithm, the simulation compares the path planning effect of four different heuristic functions commonly used in A* algorithm, and puts forward an improved heuristic function with weighted Manhattan distance. The simulation verifies that the heuristic function improves the path planning efficiency of A* algorithm, and has advantages in the length of the searched path, the search time and the number of nodes searched. According to the principle of local path planning DWA algorithm, how to select the weight of three evaluation indexes of the evaluation function of this algorithm is simulated and analyzed.By fusing A* algorithm with weighted Manhattan distance and DWA algorithm, the fusing algorithm is made as close as possible to the global optimal path, which effectively avoids the shortcoming that DWA algorithm is prone to fall into local optimal, and meanwhile reduces the running time of the algorithm.According to the key technology composition of the automatic driving system, the robot chassis and lidar are selected, and the hardware platform of the unmanned vehicle is built;Based on the working framework and basic characteristics of ROS用于自动驾驶系统的路径规划技术研究system, the function of each module of navigation stack organization framework was analyzed in detail, and the specific method of move_base package for path planning algorithm verification was studied. The algorithm plug-in and robot visualization model studied in this paper were configured.In the experimental part, the key parameters in move_base package were configured, the static and dynamic experimental environments were set up, and the experimental verification and result analysis of path planning were completed, which proves that the algorithm studied in this paper has certain practicability.Key Words: Global path planning, Local path planning, ROS, Optimal path, Running timeIV目录目录第1章绪论 (1)1.1 课题研究背景与意义 (1)1.2 自动驾驶技术发展现状 (2)1.2.1 国外自动驾驶发展现状 (2)1.2.2 国内自动驾驶发展现状 (4)1.3 路径规划技术的发展概况 (5)1.3.1 传统算法 (5)1.3.2 智能算法 (6)1.3.3 启发式算法 (7)1.3.4 路径规划技术发展趋势 (8)1.4 论文章节安排 (8)第2章全局路径规划算法 (10)2.1 引言 (10)2.2 A*算法原理 (10)2.3 A*算法实验仿真 (12)2.4 改进的启发函数 (15)2.5 本章小结 (17)第3章局部路径规划算法 (19)3.1 引言 (19)3.2 DWA算法原理 (19)3.2.1 车体运动模型建立 (19)3.2.3 速度采样 (20)3.2.4 评价函数 (22)3.3 DWA算法仿真 (24)3.4 全局规划算法与局部规划算法的融合 (29)3.4.1 DWA算法存在的缺点 (29)3.4.2 A*算法与DWA算法的融合 (29)3.4.3 融合A*算法的DWA算法实验仿真 (30)3.5 本章小结 (34)用于自动驾驶系统的路径规划技术研究第4章机器人自动驾驶系统搭建 (35)4.1 引言 (35)4.2 硬件平台搭建 (35)4.2.1 机器人平台 (35)4.2.2 激光雷达 (38)4.3 软件系统设计 (41)4.3.1 ROS架构 (41)4.3.2 导航包模块构成 (42)4.3.2 全局路径规划算法扩展 (46)4.3.3 局部路径规划算法扩展 (47)4.3.4 机器人可视化模型的建立 (48)4.4 本章小结 (50)第5章路径规划实验验证 (51)5.1 引言 (51)5.2 move_base包参数配置 (51)5.2.1 通用文件配置 (52)5.2.2 全局规划文件配置 (52)5.2.3 本地规划器配置 (53)5.2.4 局部规划文件配置 (54)5.3 实验结果及分析 (54)5.3.1 静态环境下实验结果 (54)5.3.2 动态环境下实验结果 (56)5.3.3 实验结果分析 (58)5.4本章小结 (60)第6章总结与展望 (62)参考文献 (65)致谢 (69)作者简历及攻读学位期间发表的学术论文与研究成果 (71)第1章绪论第1章绪论1.1 课题研究背景与意义在智慧交通和人工智能技术飞快发展的今天,自动驾驶系统通过去除人力化成本,为人们的生活带来更多的便捷。
路径识别的神经网络算法研究摘要:飞思卡尔智能车是由电磁传感器检测车身偏离导线的偏差量,配合舵机和电机的动作来实现自动循迹。
针对智能车循迹过程中偏差量准确计算的难点,提出了神经网络路径识别算法。
采用四个电感线圈作为路径识别的传感器,将四路传感器的感应信号值作为多层前馈神经网络的输入值,理想偏差量作为多层前馈神经网络的目标输出值,在matlab环境下进行训练,得到微控制器所需的参数值。
将此算法移植到智能车的应用上,计算得出的偏差量与实际偏差量的误差在±1cm以内。
关键词:智能车;电磁循迹;路径识别;神经网络;偏差量中图分类号:tp391.41 文献标识码:a 文章编号:1007-9599 (2012) 17-0000-021 引言人工神经网络是模拟生物神经系统建立起来的非线性动力学系统具有自我学习、联想存储以及高速寻求最优解的强大功能,它的分类能力和非线性映射能力使得它在系统辨识、模式识别、图像处理、智能控制等领域有着广泛而吸引人的前景,并且越来越多地被人们所运用。
“飞思卡尔”杯全国大学生智能车竞赛中的电磁组是依据电磁感应原理,实现智能车的自动循迹。
以飞思卡尔公司生产的mc9s12xs128芯片作为微控制器,以通有固定频率和电流值的导线作为目标路径,用电磁传感器检测智能车偏离导线的偏差量,配合舵机和电机的动作在50cm宽的赛道上实现自动循迹。
其中偏差量的检测与计算是智能车能否准确快速跟踪引导线的关键。
当前偏差量的计算算法主要有两种,一种是取感应电动势最大的传感器位置作为线径所在位置,这种方法本质上以点来检测,测量精度低,需要的传感器数量大。
另外一种是根据感应电动势的特点,将两个传感器的感应电动势作差值计算,得到电动势与偏差量之间的一个二次函数,这种方式计算是关于二次函数来进行的,计算量大,对检测的实时性会有所影响。
本文提出的方案,是以电感线圈作为传感器来检测路径,基于人工神经网络算法来计算车身相对引导线的偏移量,把样本数据放在matlab环境下训练,得到满足误差要求的参数,然后将参2 bp神经网络模型基本原理bp神经网络由信息的正向传播和误差的反向传播两个过程组成。
2022年 / 第7期 物联网技术970 引 言ROS (Robot Operating System )是一种开源的操作系统,使用该系统可以减轻工作量,其主要功能是便于智能小车研发过程中的代码复用;它提供了与操作系统类似的各种各样功能,比如程序间信息的传递、底层驱动程序管理、程序发行包管理等,方便了人们对智能小车的研究和使用;同时,它还提供了一些用于获取、建立、编写和运行多机整合的程序,使得开发者更容易使用ROS 系统[1-5]。
机器人想要在未知的环境中实现自主移动、自主避障,就必须知道自己的位置、环境中障碍物情况以及周围环境情况等。
SLAM 技术可以帮助机器人获得自身定位和周围环境状况。
在智能小车中使用激光雷达作为环境感知的传感器,再配合SLAM 技术,能够达到同时定位和地图构建的 目的。
1 ROS 小车构造如图1所示,本文智能小车的主要硬件结构分别为:ORBBRC 深度相机、激光雷达、Nano 无线网卡6 dB 增益天线、NVIDA Jetson Nano 、扭力悬挂装置、520编码器减速电机、双腔体音响输出和麦克纳姆车轮,并且以STM32F405RGT6单片机作为控制板和开发板。
在该结构下可以完成智能小车的ROS 串口传输、电机和电池数据反馈、多传感器数据融合、SLAM 定位建图导航和路径规划等多个功能。
在此基础上,还可以对小车进行二次深度开发,使小车更加完善、功能更加强大。
图1 小车系统结构1.1 驱动功能的实现本智能小车采用STM32F405RGT6芯片作为中央控制器的最小系统模块,主要用于实现驱动功能以及控制功能。
该芯片的特征是配备了FPU 的ARM32位Cortex-M4 CPU ,采用自适应实时Acelector ,允许从闪存执行0等待状态,频率高达168 MHz ,性能十分优良。
STM32机器人驱动板是一款适用范围非常广的ROS 雷达车机器人驱动板,具有稳压、驱动、传感器数据采集等功能,其稳压功能可以将7~12 V 的直流输入电压降压到5 V 或改变成其他形式的电压,可用于给主芯片供电或驱动马达等外部设备。
毕业设计(论文)题目视觉导引智能寻迹小车系统设计如需要源代码或者其他资料可以联系我(1163776101@ OR m201570436@)姓名学号所在学院机械工程学院专业班级指导教师日期年月日智能车作为现代社会的新产物,以及它的安全、节能、环保、智能化和信息化越来越受到人们的关注,在智能车的基础上开发出来的产品已经成为自动化物流运输、柔性生产组织等系统的关键设备。
本设计是一种基于单片机控制的简易智能寻迹小车系统,对智能车自主行驶的决策以及算法也进行了相应的研究。
本论文主要从总体方案设计、硬件和软件设计。
硬件方面以Cortex-m3为控制核心,使用STM32F103RBT6单片机,辅助模块包括电源模块、驱动模块,图像采集模块以及为了调试方便而采用的辅助调试模块。
软件设计方面重点介绍了寻迹小车如何解决轨道检测和线路跟随问题。
单片机将CMOS摄像头对路面黑色轨迹进行检测的信号,通过一定的算法分析,通过调整PWM占空比控制小车左右两轮的速度以实现转向,从而使小车能够沿着黑色轨迹自动行驶,到达自动寻迹的目的。
关键字:智能车,图像处理,STM32As the new product of modern society, intelligent vehicle, and its safety, energy saving, environmental protection, intelligence and information technology, is paid more and more attention,The product has become the key equipment of the automation logistics transportation, the flexible production organization and so on. This design is a simple intelligent tracing car system based on microcontroller control, and the autonomous driving decision and algorithm of the intelligent vehicle are also studied.This paper mainly from the overall scheme design ,hardware and software design. Hardware to Cortex-M3 as the control core, use stm32F103RBT6 microcontroller, auxiliary module including power supply module, a driving module, image acquisition module and to facilitate the debugging and the auxiliary debug modul . The design of the software focuses on how to solve the track detection and line following problem. SCM CMOS camera on the road to detect the black trajectory of the signal, through a certain algorithm analysis.By adjusting the duty ratio of PWM to control the speed of the car around two wheels to achieve the steering, so that the car can automatically travel along the black track, reaching the purpose of automatic tracing.Keywords: smart car, image processing, stm32目录1 绪论......................................... 错误!未定义书签。
智能汽车路径识别中的图象处理算法
李 继 李晋尧 杨 明 孔士嘉
(北京印刷学院 信息与机电工程学院 北京 102600)
摘 要: 分析全国大学生智能汽车竞赛中智能汽车路径识别中的图象处理算法,重点介绍智能车车牌识别的控制算法。
智能汽车通过OV7620数字摄像头对路面信息进行采集和处理,依次实现自动识别十字路口上的红绿灯、自动检测前方车距、自动识别车牌等功能,并以一个较高的稳定速度运行在规定的道路上。
关键词: 智能车;车牌识别;图象处理
中图分类号:TP391.4 文献标识码:A 文章编号:1671-7597(2011)1010184-02
1 绪论
到),D_out 是D 调节器的输出。
因此,输出了相应的弧度角,小车方向控制的功能也就实现了。
随着21世纪经济全球化和信息化的加剧,计算机通信技术和计算机网 3 智能车自动识别十字路口的红绿灯
络技术等的迅猛发展,自动化信息处理能力和水平的不断提高并在人们社会活动和生活的各个领域得到广泛应用,高速度、高效率的生活节奏使汽智能车利用CMOS 摄像头识别十字路口的红绿灯,当小车驶至十字路口车普及成为必然趋势。
前,摄像头采集前方图像的灰度,当那个采集到某个区域的灰度值范围在伴随着世界各国汽车数量的增加,城市交通状况日益受到人们的重240-255时,则说明前方交通指示灯为红灯,小车在十字路口白线前停视。
如何有效地进行交通管理,越来越成为各国政府及相关部门所关注的车,若没有采集到灰度值240-255范围时,认为前方交通指示灯指示为绿焦点。
针对这一问题,人们运用先进的信息处理、导航定位、无线通信、灯,小车匀速驶过十字路口。
当红灯变成绿灯时,小车检测到前方没有自动控制、图像处理和识别及计算机网络等科学技术,相继研发了各种交240-255的灰度值,则小车启动,驶过十字路口。
通道路监视管理系统、车辆控制系统及公共交通系统。
这种智能交通系统 4 智能车车牌识别的控制实现
能够加强道路、车辆、驾驶员和管理人员的联系,实现道路交通管理自动车牌识别最基本的流程是:将采集后的图像二值化,然后依次经过车化和车辆行驶的智能化,增强交通安全,减少交通堵塞,提高运输效率,牌定位、字符分割、去除干扰,最后是字符识别。
减少环境污染,节约能源,提高经济活力。
4.1 二值化
本文设计的系统,就是在智能汽车以及飞思卡尔16位嵌入式处理器二值化是车牌识别的第一步。
二值化前后的对比如下图2所示:
S12X 单片机的基础上,对模拟驾驶进行创新设计,以期应用到实际的交通驾驶中。
2 智能车基于CMOS摄像头的路径识别和方向控制
智能车采用CMOS 图像传感器用于检测黑色跑道上两边的白线,扩展了检测范围,有助于选择正确的行进路线。
在检测中,对图像中的前十行的像素进行分析,找出两条白线的中点,通过反复的实验,智能小车能够以一个较高的速度稳定地运行在给定的跑道上。
2.1 路线的识别和确定
路线识别和确定是智能车可以前行的前提。
通过对摄像头所采集的图像进行二值化,然后对前十行的像素进行分析,由每行中两个白点的坐标来确定中心的坐标,从而得出十个中心坐标,将十个中心坐标连接起来,图2 二值化前后对比图
就是小车需要走的路径。
图1所示为摄像头对跑道图像二值化的结果。
在车牌识别中,通过图像的二值变化将车牌与背景分割开来,要求转化的图像必须具有良好的保形性,不丢掉有用的形状信息,不产生额外的空缺等,其关键在于确定合适的阀值。
4.2 车牌定位
车牌定位是车牌识别的一个关键步骤,定位的准确与否直接影响着车牌识别的准确率。
在车牌定位算法中,关键是寻找图像处理方法,使原始图像经图1 跑道的图像二值化结果
2.2 方向控制
智能汽车方向控制的核心是舵机控制,其输入信号是PWM 脉冲,并输出相应的弧度角。
本文采用的S12单片机PWM 输出信号端口作为舵机的输入信号。
为了使检测时更加稳定,本文采用了PID 控制器,由于无需考虑已经走过的轨道,所以本文只用比例微分调节器模块,下面公式显示了D 调节器的控制算法:
在enew
,eold 定义了这一次和下一次的角度的计算,t 是CMOS 摄像头扫描时间,微分系数Kd 被强制规定运行在0.5到1.5
(通过多次试验得
过该算法的处理后能够清楚地显示出车牌区域,同时使图像中的非车牌区域消失或者减弱,从而能准确有效地定位出车牌在图像中的位置。
车牌识别过程中,我们采用角点定位的方法,在所有的边界点中,选择某些曲率半径比较小的点,如图3所示(角点用红点表示)。
图3 二值化后角点定位图
图中字符上和车牌的四角都有角点,但是这并不影响车牌的定位。
根图5将超声波传感器装在智能小车车头,其工作原理是给予此超声波据距离最大的四个角点,得到了车牌的四个角,从而定位了车牌。
从角点测距模块信号后发射超声波,当超声波投射到前方小车车尾而反射回来定位的原理看出,如果经过旋转后车牌并不会影响角点定位的成功率和速时,模块输出一响应信号,以触发信号和响应信号间的时间差,来判断两度。
车之间的距离。
4.3 字符分割
当车子行驶时,给后车提供一个短期的10us 脉冲触发信号。
该模块内确定了车牌位置后就要对车牌进行提取,对图像目标位置标记,然后部将发出8个40kHz 周期电平并检测回波。
一旦检测到有回波信号,则输出利用原始图像进行车牌位置提取。
提取之后就要进行车牌字符的分割提响应信号,响应信号是一个与脉冲宽度成正比的距离对象,可通过发射信取,车牌字符的正确分割是进行下一步车牌字符识别的基础。
我们采用的号到收到响应信号的时间间隔计算距离。
公式:us/58=厘米。
如图6所是字符分割法:对于一个数字或者字母,前景的点是连续的,用填充算法示:
对种子点填充即可得到整个字符。
当然汉字就不是了,所以这种分割算法仅仅适合数字或者字母。
但是当整个车牌的数字和字母都得到之后,剩下的那个必定是汉字。
4.4 字符识别
字符识别是车牌识别系统的最后一个处理过程,也是车牌识别的关键点,对字符识别的研究也是车牌识别研究的重点。
因为车牌字体是印刷字体,对于印刷字符识别,一般的思路是和模板比对。
这样做最大的好处在于编程方便。
但是有两个坏处,第一速度较慢,第二识别率不高。
在字符特点中,用编程语言逐一描述字符的特点,可以很好的提高在恶劣环境下的字符识别率,从而提高车牌识别的质量。
4.5 车牌显示
通过以上各步骤以后,采集到的图像经过S12单片机系统板将反馈到液晶屏上显示,从而识别车牌。
如图4所示:
图6 超声波模块时序图
6 结论
本设计充分利用了飞思卡尔公司产品选择多样,功能完善,适应性强的多款芯片。
其中采用MC9S12XS128采集和处理视频信号,完成自动识别检测等功能;通过LQ-7960M 进行电机驱动,实现智能汽车自动加减速控制;通过OV7620数字摄像头对路面信息进行采集和处理,实现了小车的寻线行驶。
图4 车牌识别
简便、安全、高效是我们设计智能汽车的创新理念,我们将遵循这个5 智能车自动检测前方车距
理念,进一步设计出更加人性化的驾驶创新技能,解决许多目前交通驾驶中亟须解决的问题,从而提高交通系统的使用效率和安全性。
参考文献:
[1]卓晴、黄开胜、邵贝贝,学做智能车——挑战“飞思卡尔”杯,北京航空航天大学出版社,2007年3月,第1版.
[2]孙同景、陈桂友,Freescale 9S12十六位单片机原理及嵌入式开发技术,机械工业出版社,2010年2月,第1版.
[3]邵贝贝,单片机嵌入式应用的在线开发方法,北京:清华大学出版社,2004年10月,第1版.
[4]谢强德,第四届全国大学生“飞思卡尔”杯智能汽车竞赛创意组上海
交大CyberSmart 队技术报告[R].上海:上海交通大学,2009.
图5 超声波传感器
[5]刘金琨,先进的PID 控制,电子工业出版社,2007年5月,第1次版
.
当节点需要把采集的温度数据发送给汇聚节点时,首先要把需要发送监控室。
的数据通过SPI 接口写入CC2420的TXFIFO 寄存器,然后发送选通寄存器参考文献:
STXON 或STXONCCA 的命令,使其在信道空闲时把数据通过无线信道发送出[1]韩旭东、曹建海,基于IEEE 802.15.4无线智能化传感器网络研究及其去。
当CC2420接收到外部传来的数据时,会首先把数据存入到接收缓存区性能分析[J].电工技术,2004(9).
RXFIFO 之中,此时CC2420会自动改变FIFO 和FIFOP 两个引脚的状态,处理[2]杨赓,Zigbee 无线传感器网络的研究与实现[D].浙江:浙江大学,器通过判断FIFOP 的引脚状态,会自动读取RXFIFO 寄存器中的整个数据2006.
包。
[3]王吉富、马建仓、卢崇,基于单片机控制射频芯片CC2420无线通信的4 结束语
实现[J].电子测量技术,2007,30(5):88-109.
将传感器网络技术应用于井下环境参数采集监测,大大提高了监测系[4]陈玉兰、聂军,面向无线传感器网络的CC2420接口设计[J].电子工程统的灵活性。
本文设计的无线传感网络节点能够采集,处理环境数据。
如师,2005,31(12):36-38.
果和主巷道内的光纤结合应用,可实方便的把现井下环境信息上传至地面
(上接第146页)。