毕业论文-基于摄像头的智能车路径识别方案
- 格式:doc
- 大小:260.00 KB
- 文档页数:29
智能小车毕业论文完整版Document serial number【UU89WT-UU98YT-UU8CB-UUUT-UUT108】学士学位论文系别:计算机科学与技术学科专业:计算机科学与技术姓名: @@@@@@@2011年 06月智能小车引导控制系统的设计与实现系别:计算机科学与技术学科专业:计算机科学与技术指导老师: @@@姓名: @@@@@@2011年 06月智能小车引导控制系统的设计与实现摘要:面对诸多恶劣的工作环境(如灭火、救援等),为了有效的避免人员伤亡,就需要采用智能小车去现场来完成相应的任务。
因此研究和开发智能小车引导控制系统具有十分重要的意义。
本系统采用STC89C51单片机作为核心控制芯片,设计制作了一款通过红外光电传感器检测路径信息、红外火焰传感器检测火源的智能寻迹灭火小车。
本系统由单片机控制模块、寻迹传感器模块、驱动电机模块、火源传感器模块、风扇模块、电源模块等组成。
实际应用表明,该小车可以在专门设计的场地上实现自主发现火源,自主识别路线,自主行进接近火源并灭火,最终完成灭火的任务。
关键词:单片机小车引导控制传感器Smart cars guide control system design and implementation Abstract: Confronted with so many bad working environment (such as fire fighting, rescue etc), in order to effectively avoid casualties, need to use intelligent go by car scene to complete relevant tasks. Therefore, the research and development of intelligent car guide control system has the extremely vital significance. This system uses STC89C51 as the core control chip, design and make a new electric sensor detection byinfrared sensor information, infrared flame path of intelligent tracing test fire extinguishing car. The system is composed of single-chip microcomputer control module, tracing sensor module, drive motor module, ignition sensor module, fan module, power supply module. The practical application indicates that the car can be in a specially designed field on fire, to realize the independent found autonomous recognition route, independent sources and marching close to the fire extinguishing, finally complete task.Keywords: Microcontroller Car Control system Sensors目录引言现在,随着科技的快速发展,国内外对小型智能系统的应用越来越广泛,种类也越来越多。
智能循迹小车硬件设计及路径识别算法
摘要:设计用于全国大学生智能汽车竞赛用的循迹小车,摄像头采集黑线引导线的位置,直流电动机驱动小车后轮,舵机作为转向驱动。
根据实际应用环境,提出用于循迹的图像处理方法,以排除黑线引导线以外物体的干扰,同时提出一种适应力强的小车循迹策略。
实验表明,在这种控制策略下,小车运行稳定,能够排除各种干扰,并且能够使小车维持很高的速度行驶。
关键词:循迹;单片机;图像处理
全国大学生智能汽车竞赛要求在组委会提供统一智能车竞赛车模、单片机MC9S12DG128开发板、开发软件Code Warrior和在线调试工具的基础上,制作一个能够自主识别路线的智能车,它将在专门设计的跑道上自动识别道路行驶。
中心目标是,在不违反大赛规则的情况下以最短时间跑完单圈赛道。
本文主要对车模整体设计思路、硬件与软件设计及车模的装配调试过程作简要的说明。
1 整体设计系统按照功能划分为:电源模块、单片机控制系统模块、运行调试模块、路径识别模块、直流电机驱动模块、舵机转向模块、速度测量模块等。
图1是小车系统硬件模块图。
本文重点介绍路径识别模块、直流电机驱动模块、舵机转向模块、速度测量模块。
1.1 路径识别模块路面信息检测模块要能够实现检测路径参数。
将面阵CMOS用于赛道参数检测的方案,充分利用S12单片机内部硬件资源ATD模块,直接采集CMOS输出的模拟信号,可以获得满足参数检测需要的图像,计算出赛道参数,进而完成路面信息检测。
检测路径传感器采用CMOS图像传感器。
普通CMOS传感器图像分辨率都在300线之上,远大于光电管阵列。
通。
智能车毕业设计范文一、引言随着科技的不断发展,智能交通系统已经逐渐成为实现交通安全和效率的重要手段之一、智能车作为智能交通系统的重要组成部分,具有自主导航、智能控制和自动执行等功能。
本文将介绍一个智能车毕业设计方案,旨在设计一款具有智能导航和避障功能的智能车。
二、设计方案1.系统框架该智能车系统由硬件和软件两部分组成。
硬件部分包括车体、传感器、控制器等,软件部分包括导航算法、避障算法等。
2.硬件设计智能车的车体由底盘、轮子和电机组成。
底盘采用轻质材料制造,轮子与电机可以实现自由转动和方向控制。
车体内部集成了传感器,包括激光雷达、摄像头和超声波传感器等。
控制器是智能车的核心部件,负责接收传感器数据、进行信息处理和控制车体行动。
控制器应具备高性能的处理器和丰富的通信接口,以满足复杂的算法运算和数据收发要求。
3.软件设计智能车的软件部分主要包括导航算法和避障算法。
导航算法是智能车实现自主导航的关键。
该算法应能根据车体当前位置和目标位置,通过传感器数据判断前方道路情况,并制定合适的行进路线。
避障算法是智能车避免碰撞的重要手段。
该算法应利用激光雷达、摄像头和超声波传感器等数据,识别周围的障碍物,并及时采取措施避免与障碍物发生碰撞。
4.实施计划该智能车的实施计划可以分为以下几个步骤:(1)搭建智能车的硬件平台,包括底盘、轮子、电机和传感器等。
(2)编写控制器的驱动程序,实现车体的基本动作控制。
(3)编写传感器数据采集与处理程序,获取传感器数据并进行处理。
(4)设计导航算法,实现智能车的自主导航功能。
(5)设计避障算法,实现智能车的避障功能。
(6)测试和调试智能车系统,不断优化算法和性能。
三、结论本文提出了一种智能车毕业设计方案,旨在设计一款具有智能导航和避障功能的智能车。
该方案通过硬件和软件的结合,实现了智能车的基本动作控制、传感器数据采集与处理、导航算法和避障算法的设计与实现。
这一方案有助于提高交通安全和效率,具有一定的实用性和推广价值。
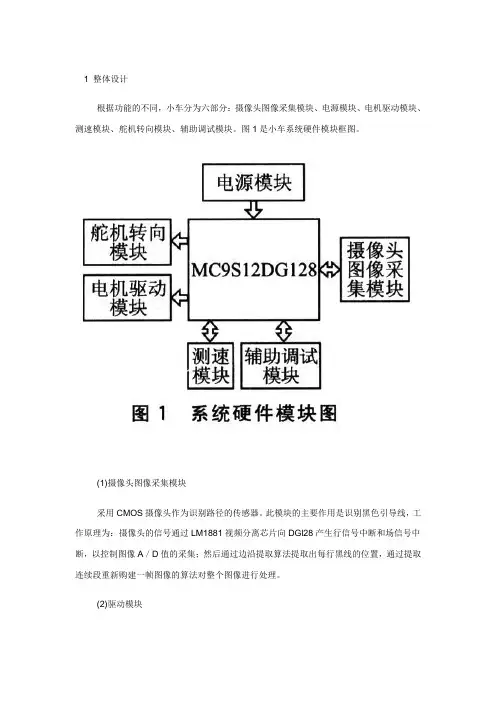
1 整体设计根据功能的不同,小车分为六部分:摄像头图像采集模块、电源模块、电机驱动模块、测速模块、舵机转向模块、辅助调试模块。
图1是小车系统硬件模块框图。
(1)摄像头图像采集模块采用CMOS摄像头作为识别路径的传感器。
此模块的主要作用是识别黑色引导线,工作原理为:摄像头的信号通过LM1881视频分离芯片向DGl28产生行信号中断和场信号中断,以控制图像A/D值的采集;然后通过边沿提取算法提取出每行黑线的位置,通过提取连续段重新购建一帧图像的算法对整个图像进行处理。
(2)驱动模块Freescale公司生产的MC33886芯片是一款性能优良的直流电压驱动芯片。
通过输入不同占空比的方波信号,可以在MC33886的输出端得到不同的电压,进而驱动电机,实现调速。
(3)测速模块采用光电耦合管和自制的码盘作为测速的传感器。
光耦合管的输出信号经过555定时器组成的斯密特触发器整形得到一定频率的矩形波信号,再经过DGl28的输入捕捉功能提取出小车的速度值。
(4)舵机转向模块为了保证小车在转弯过程中既能快速响应,又防止速度过快冲出跑道,利用汽车转向机构原理,把舵机的位置进行了提升。
这样可以增大力矩,使小车快速响应,按照轨迹进行快速转弯。
2 图像采集及处理2.1 图像采集常用的摄像头视频输出信号是电视机的PAL制式。
它的工作原理与电视机的工作原理相似:在一定分辨率下,每秒扫描25帧图像,每帧图像含有625行信息;分为奇、偶场,隔行扫描;总共每秒50场信号,每场有312.5行信息;从奇数行开始扫描,即依次扫描第l、3、5、7、9……当扫描完奇数场后,再开始扫描偶数场,构成一帧图像。
对图像的采集是根据摄像头的行信号和场信号对图像模拟量的采集。
如图2所示,输出信号包括行同步信号、场同步信号、图像信号以及各种消隐信号。
行同步信号代表一行的图像数据扫描开始。
场同步信号代表一帧的图像数据扫描开始。
要完成图像的正确采集,必须严格遵守时序的要求:当捕捉到一行信号时,开始对该行各点的模拟量进行采集,当下一行信号发生时表明该行采集完毕,需要对下一行的模拟量进行采集。
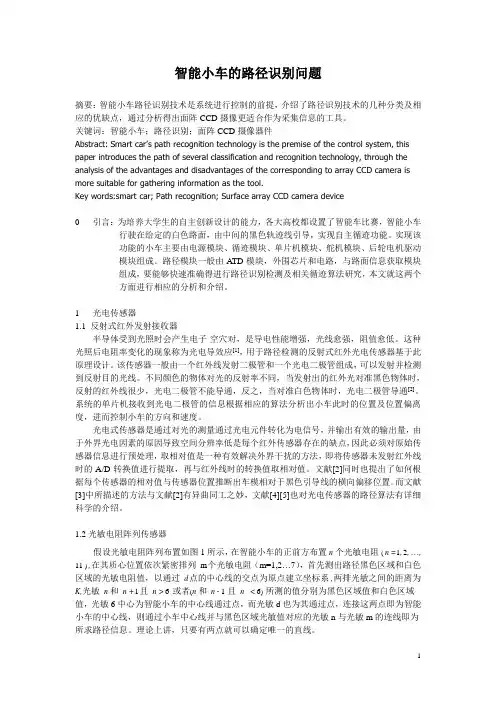
智能小车的路径识别问题摘要:智能小车路径识别技术是系统进行控制的前提,介绍了路径识别技术的几种分类及相应的优缺点,通过分析得出面阵CCD摄像更适合作为采集信息的工具。
关键词:智能小车;路径识别;面阵CCD摄像器件Abstract: Smart car’s path recognition technology is the premise of the control system, this paper introduces the path of several classification and recognition technology, through the analysis of the advantages and disadvantages of the corresponding to array CCD camera is more suitable for gathering information as the tool.Key words:smart car; Path recognition; Surface array CCD camera device0 引言:为培养大学生的自主创新设计的能力,各大高校都设置了智能车比赛,智能小车行驶在给定的白色路面,由中间的黑色轨迹线引导,实现自主循迹功能。
实现该功能的小车主要由电源模块、循迹模块、单片机模块、舵机模块、后轮电机驱动模块组成。
路径模块一般由ATD模块,外围芯片和电路,与路面信息获取模块组成,要能够快速准确得进行路径识别检测及相关循迹算法研究,本文就这两个方面进行相应的分析和介绍。
1 光电传感器1.1 反射式红外发射接收器半导体受到光照时会产生电子-空穴对,是导电性能增强,光线愈强,阻值愈低。
这种光照后电阻率变化的现象称为光电导效应[1],用于路径检测的反射式红外光电传感器基于此原理设计。
该传感器一般由一个红外线发射二极管和一个光电二极管组成,可以发射并检测到反射目的光线。
基于摄像头的智能循迹小车控制算法设计智能循迹小车的设计包括车的机械结构设计,硬件电路设计和控制算法设计三个方面。
文章采用模糊控制和PID算法进行电机和舵机的控制,完成智能循迹小车的控制算法设计。
该控制算法能够使得智能循迹小车在指定赛道内完成自动行驶的功能,达到设计要求。
标签:算法设计;智能循迹小车;行驶控制引言随着人工智能技术的发展,智能行车软件开发已成为计算机科学领域的研究热点之一,许多的实验平台和驾驶辅助系统已经开发出来。
自动驾驶的实现需要依靠人工智能、视觉计算、雷达、监控装置和全球定位系统协同合作,让电脑可以在没有任何人类主动的操作下,自动安全地操作机动车辆。
基于摄像头的智能循迹小车的设计与控制软件研发是探索自动驾驶技术的一种有效途径,它以摄像头为路况监测传感器,完成在指定道路上的不同任务。
智能循迹小车的设计与控制软件研发主要包含三个基本方面[1-3]:机械结构的设计、硬件系统的搭建、软件系统的编写。
机械结构调整模仿汽车的机械结构,包括重心调整,前轮定位等。
硬件电路的设计遵从可靠性,稳定性和完整性,设计出一套符合要求的硬件电路。
软件设计通过道路识别算法和控制算法完成控制,同时以大量的赛道数据为基础保证了智能车的稳定性。
1 智能循迹小车的机械结构小车的机械结构主要由电机,底盘,舵机和摄像头四个部分构成。
在智能车底板与后驱动模块之间增加垫片可以降低底盘离地的间隙,为了保证智能车在弯道行驶时不发生侧滑,底盘离地的间隙应该是越小越好,但还要考虑车模在坡道处底盘不会碰到赛道,经过实验设置底盘离地间隙为8mm。
舵机采用前置悬置方式安装,使摆臂和舵机始终处于同一个水平面,有利于转向的灵活性,缩短舵机反应时间。
智能车CMOS摄像头的安装主要考虑了三个因素[4-5]:首先,保证摄像头的位置绝对居中且正对前方;其次,在安装高度上要尽量高,获取足够多的路况信息;最后,近瞻距离智能车20CM之内,用来保证智能车不偏离赛道。

基于CCD摄像头的智能车系统设计摘要随着电子技术与智能控制的发展,智能车的已经成为自动控制领域内的一个研究热点。
第一章绪论1.1研究背景1.1.1 智能车的发展历程智能车的发展是从自动导引车(Automatic Guided Vehicle,AGV)起步的。
AGV是指装有电磁或光学等自动导引装置,能够沿规定的导引路径行驶,具有安全保护及各种移栽功能的运输车辆。
1913年,美国福特汽车公司首次将有轨导引的AGV代替输送机用到底盘装配上。
1953年,美国Barrett Electric公司制造了世界上第1台采用埋线电磁感应方式跟踪路径的自动导向车,也被称作“无人驾驶牵引车”。
20世纪60年代和70年代初,AGV仍采用这种导向方式。
在20世纪70年代和80年代初,AGV的应用领域扩大而且工作条件也变得多样化,因此,新的导向方式和技术得到了更广泛的研究与开发。
随着电子和计算机技术的发展,视觉导航和激光导航成为了热门的研究方向。
由此出现了智能车的概念。
从1987年到1994年,在欧洲展开可“普罗米修斯” (Prometheus Program for the European traffic of highest efficiency and unprecedented safety)EUREKA项目。
该项目中颇具代表性的是戴姆勒——奔驰公司研制的VITAⅡ试验车,于1994年10月在巴黎附近的一条告诉公路上进行了车辆导航试验,在长达几千公里的普通三车道路段中采用了驾驶员辅助驾驶和车辆自主驾驶相结合的导航方法。
德国联邦大学(UBM),从20世纪80年代初期就开始了智能车辆自主导航研究,其合作伙伴是德国戴姆勒—奔驰汽车公司。
其中最具代表性的是一辆由豪华型本车500SEL改装成的VaSoRs-P试验车。
VaSoRs-P 试验车在高速公路和普通公路上进行了大量的试验,试验内容包括跟踪车道线,躲避障碍以及自动超车等。
基于光电摄像头路径识别智能小车的研究作者:夏雨磊来源:《中国新通信》2015年第08期【摘要】为了实现无人控制智能车在特殊道路上实现的自主行走的目的;采用光电摄像头作为实时采集单元结合软件控制单元闭环反馈的方法,在特殊赛道下自行调整舵机转向,电机的加减速,成功实现了在非人为环境下按照黑色引导路线快速准确的行驶。
【关键词】摄像头自主行驶智能小车一、引言进入21世纪以来,智能化与自动化这一课题,随着时代的发展,愈发扮演者重要的角色。
到如今,汽车行业在时代的前进脚步中同样不断进行着蜕变,随着自动化产业的高速发展,无人控制领域的诞生,无人自主智能车应运而生。
本设计以单片机为控制核心,采用CCD摄像头实现对引导路线图像的获取,并通过软件对图像进行处理提取路径,然后通过控制算法控制智能小车实现自动行驶。
二、系统的总体设计2.1 系统的工作原理智能车系统的工作原理是:CCD摄像头拍摄赛道图像,通过片外AD进行模数转换,将得到的数据输入MC9SXS128单片机,通过程序提取黑色引导线;通过编码器检测车速,通过单片机输入捕捉功能进行脉冲计数得到小车的实时速度。
由得到的引导线,选择参考行,通过分段P系数算法来控制舵机;通过赛道的曲率,计算得到目标速度,利用PID相结合的闭环控制算法调整电机来控制小车速度。
2.2 系统的总体设计框图三、硬件模块的设计摄像头采用TSL1401线性CCD模块,此芯片主要是以TAOS公司生产的芯片TSL1401R 为核心构成,并且继承高达128像素的线性阵列传感器并且配套专门用于线性CCD的透镜。
该模块成像所反映的是一维的图像,当在伴随车身运动的过程中可以获得二维的图像。
小车转向控制使用的是SD-5数字舵机。
主驱动电机采用RS-540速度电机,其转速高达20000r/min,内装散热风扇,最大功率可达118w,能够快速有力的带动车身前进后退,是一款较为理想的驱动电机。
测量速度采用欧姆龙编码器将车轮转速转换成以数字脉冲。
基于CMOS数字摄像头检测路径的智能小车设计毛堃1,樊月珍1,钱桦1,刘桂林1(1.北京林业大学工学院,北京100083)摘 要: 以Freescale公司的MC9S12DG128作为系统的核心控制处理器,通过CMOS数字摄像头获取前方赛道信息,采用二值化法提取赛道黑线,通过采用特殊的算法来判断赛道的大致变化趋势,从而实现小车提前转向,并根据路况的不同而为小车分配以不同的速度。
实验结果表明,小车能够稳定地自动寻线。
关键词:单片机,CMOS数字摄像头,图像采集,速度,斜率文献标识码:A 中图分类号:TP302Design of Auto Route Identified Vehicle Model Based on CMOSMao Kun1 ,Fan Yue-zhen1 ,Qian Hua1 ,Liu Gui-lin1(1.Institute of Technology, Beijing Forestry University, Beijing 100083, China)Abstract: Freescale MC9S12DG128 processor was used on an Auto Route Identified Vehicle Model. The vehicle model obtains the track image through a CMOS digital camera. It uses binarization method to get black line. Smart car analyzes the road conditions ahead through a specific algorithm so that it can easily adjust its velocity according to different conditions. The experimental results show that the method was reasonable.Keywords: Freescale MCU, CMOS digital camera, image acquisition, velocity, slope0 前言“飞思卡尔杯”全国大学生智能汽车竞赛是由教育部批准并委托自动化专业教学指导分委会主办,飞思卡尔公司协办,面向全国大学生的重要赛事。

《基于深度学习的车辆智能识别方法研究与实现》一、引言随着科技的进步和人工智能的飞速发展,车辆智能识别技术已成为现代交通管理和安全领域的重要研究方向。
深度学习技术的崛起为车辆智能识别提供了新的思路和方法。
本文将针对基于深度学习的车辆智能识别方法进行深入研究,并探讨其实现过程。
二、研究背景与意义车辆智能识别是指通过先进的图像处理技术和算法,自动识别并获取车辆信息,如车牌、车型等。
这种技术在现代城市交通管理中发挥着重要作用,可以用于违章停车检测、车辆跟踪、车辆盗窃防范等场景。
而深度学习技术,特别是卷积神经网络(CNN)的崛起,使得车辆智能识别精度得到了显著提高。
因此,基于深度学习的车辆智能识别方法研究与实现具有较高的理论价值和实践意义。
三、研究方法与技术路线(一)数据准备首先,需要准备大量车辆图像数据集,包括不同车型、不同角度、不同光照条件下的图像。
同时,需要将这些图像进行标注,以便于后续的模型训练和识别。
(二)模型构建本研究采用深度学习技术中的卷积神经网络(CNN)进行模型构建。
通过构建多层卷积层和池化层,自动提取图像中的特征信息。
此外,还可以采用迁移学习的方法,利用预训练模型提高模型的泛化能力。
(三)模型训练与优化使用准备好的数据集对模型进行训练,通过调整模型参数和优化算法,提高模型的识别精度和泛化能力。
同时,采用交叉验证等方法对模型进行评估和验证。
(四)模型应用与实现将训练好的模型应用于实际场景中,如交通监控系统、停车场管理系统等。
通过实时获取车辆图像信息,自动进行车辆智能识别,为交通管理和安全提供支持。
四、实验结果与分析(一)实验结果通过实验验证了基于深度学习的车辆智能识别方法的可行性和有效性。
在多种不同场景下,该方法均能实现较高的识别精度和稳定性。
具体实验结果如下:1. 不同车型的识别精度均达到95%2. 在不同光照条件下的识别率也较高,达到了85%(二)实验分析针对上述实验结果,进行如下分析:1. 模型泛化能力:本方法通过采用卷积神经网络及迁移学习,有效提高了模型的泛化能力。
文章编号:2095-6835(2023)11-0050-04基于CCD 传感器的智能车路径识别研究*米汤,尚友良,符晓玲(昌吉学院,新疆昌吉回族自治州831100)摘要:为了实现无人控制智能车在不同道路上自主循迹行驶的目的,设计了一种基于CCD 传感器的智能车控制系统。
该控制系统以32位单片机STM32F103RCT6为控制核心,通过CCD 传感器采集路径图像信息,并通过核心控制器对图像进行二值化处理,以及采用动态阈值提取的方式选取阈值。
利用PID 控制算法实现电机的运转和舵机的转向。
通过实物验证,该控制系统成功实现了在不同道路环境下按照黑色引导线快速准确地行驶,行驶过程中智能车表现出较好的实时性和鲁棒性。
关键词:CCD 传感器;路径识别;图像处理;PID 控制中图分类号:TP391.4文献标志码:ADOI :10.15913/ki.kjycx.2023.11.013随着科学技术的发展和人类社会的进步,汽车行业进入了新的轨道,开始由传统制造向智能制造发展。
在新的发展趋势下,如何使智能车准确高效地识别路径是首要问题,这也受到了诸多学者的关注和研究。
目前路径识别的方法主要有光电传感器、视觉传感器和电磁传感器3种。
焦冰等[1]设计了一种以MK60DN512ZVQ10为控制器核心,OV7725视觉传感器获取赛道二值化图像的智能车控制系统,并采用PID 控制算法控制舵机的转向和驱动电机的转速。
冯玉如[2]、杜方鑫[3]设计了一种基于线性CCD 的智能车控制系统,采用线性CCD 采集路况信息,将采集到的路况信息发送给单片机,单片机根据阈值进行二值化处理,实现自动循迹的功能。
王海燕[4]设计了一种基于电磁传感器的路径识别系统,该系统采用6组相同电磁电路横向“一”字布局,大大提高了检测密度和广度,该设计提升了数据采集的效率和准确度,使得智能车的循迹更加稳定。
1智能车硬件总方案为了更好地实现智能车自主循迹,本文给出的设计方案硬件包括控制器核心模块、电源模块、摄像头驱动模块、电机驱动模块、舵机驱动模块和OLED 显示模块,整体硬件结构如图1所示。
基于摄像头的智能小车路径识别中黑线提取算法
张银建;杨欢欢;王竞
【期刊名称】《中国电子商务》
【年(卷),期】2012(000)004
【摘要】路径识别是智能车应用中的关键技术,直接决定了智能车行驶的质量。
本文利用摄像头进行黑白道路图像采样以获取道路图像信息,通过灰度值提取道路黑线和边缘信息。
实际运行表明能较好地实现智能小车的路径识别功能。
【总页数】1页(P106-106)
【作者】张银建;杨欢欢;王竞
【作者单位】重庆工商大学计算机科学与信息工程学院,重庆400067;重庆工商大学计算机科学与信息工程学院,重庆400067;重庆工商大学计算机科学与信息工程学院,重庆400067
【正文语种】中文
【中图分类】TP39
【相关文献】
1.基于线阵CCD的智能小车路径识别系统 [J], 温阳东;王祥好
2.基于CCD摄像头黑线提取算法 [J], 华文;俞斌;翁华
3.基于STM32F407的路径识别智能小车设计 [J], 苏元楷;季磊;聂嘉欣;蔚国将;关玉琴
4.基于光电摄像头路径识别智能小车的研究 [J], 夏雨磊
5.基于黑白摄像头的智能小车路径识别系统设计 [J], 吴吟箫;张虹;王新生
因版权原因,仅展示原文概要,查看原文内容请购买。
毕业设计论文+智能循迹避障小车设计今天要一起走进一个超级有趣的科技小天地,去了解一种特别厉害的东西——智能循迹避障小车。
想象一下,有一辆小小的车车,它就像有自己的小脑袋一样,能自己沿着特定的路线跑,还能聪明地躲开路上的障碍物,是不是感觉很神奇?那就让一起来看看它是怎么设计出来的!一、小车的“眼睛”——传感器。
你知道吗?这个智能循迹避障小车要想看得清路,得有一双特别的“眼睛”,这双“眼睛”就是传感器。
就好比人用眼睛看东西,小车就是靠传感器来感知周围的环境。
比如说,它的循迹传感器就像一个小小的侦探,能发现地上画的黑线或者其他特殊的标记。
当小车的轮子压到黑线的时候,传感器就会马上告诉小车:“走到路线上,继续往前开!”而避障传感器,就像是小车的“安全卫士”。
假如前面突然出现了一个小玩具或者其他障碍物,避障传感器就会立刻察觉到危险,然后赶紧给小车发出信号:“前面有东西挡住,快停下来或者绕开!”这样,小车就能安全地行驶,不会撞到东西。
二、小车的“大脑”——控制芯片。
有了“眼睛”还不够,小车还得有一个聪明的“大脑”来指挥它行动,这个“大脑”就是控制芯片。
控制芯片就像一个小小的指挥官,它会根据传感器传来的信息,做出正确的决定。
比如说,当循迹传感器告诉它已经偏离路线,控制芯片就会像一个严格的老师一样,指挥小车的轮子调整方向,让它重新回到正确的路线上。
要是避障传感器传来有障碍物的消息,控制芯片就会迅速想出办法,让小车向左或者向右转弯,避开危险。
这就好比在走路的时候,要是看到前面有个大坑,就会绕着走一样,小车也很聪明!三、小车的“动力源泉”——电池和电机。
小车要跑起来,还得有足够的动力,这就需要电池和电机来帮忙。
电池就像是小车的“能量加油站”,给小车提供源源不断的电力。
就像吃饭能获得能量一样,小车“吃”了电池的电,就有力气跑。
而电机,就像是小车的“强壮肌肉”。
当控制芯片下达前进的命令后,电机就会飞快地转动起来,带动小车的轮子咕噜咕噜地向前跑。
基于摄像头的智能车路径识别方案摘要:本文按照第四届“飞思卡尔”杯全国大学生智能汽车邀请赛的技术要求,经过一段时间的资料的采集与样本电路的参照,本文主要介绍了车模的系统设计原理,系统软件,与方案简介。
在硬件电路的设计与实现中,描述了最小系统设计,电源模块,并且着重描述数字摄像头OV6620,在软件系统设计中,讲述了时钟模块,ECT模块,图像采集以及图像处理等内容,经过实践证明,这些理论方案都可以得到证明,能使汽车稳定快速运行。
关键字:智能车;摄像头;电源模块;图像采集The identification of intelligent vehicle path of program is based on CameraAbstract: This article in accordance with the 4th "flying to Karl" Cup National University SMART Car Invitational technical requirementsfor the time of the information gathering and sample circuits in the light of this article introduces the car model system design principles, system software, and the programme profile. On the hardware circuit design and implementation, describes the minimum system design, power supply, with emphasis on described digital camera OV 6620 in software design of the system on the clock module, ECT modules, image acquisition and image processing, the practice has proved that these theories programmes can be proved that auto steady and rapid operationKeywords: SMART cars; camera; power supply; image acquisition目录前言 4第1章系统设计概述 51.1系统设计原理 51.2系统软件 61.3方案简介 6第2章硬件电路的设计与实现 72.1最小系统板设计 72.2电源模块 82.2.1 5v电源 92.2.2 6V电源 92.3数字摄像头OV6620 102.3.1 OV6620简介 102.3.2 OV6620 和普通摄像头的对比 10 2.3.3 OV6620管脚说明 112.3.4 OV6620图像采集 11第3章软件系统设计 143.1 时钟模块 143.2 ECT模块 143.3 图像采集 163.4 图像处理 173.4.1 二值化算法 175.4.2 黑线提取流程 19结论 21致谢 22参考文献 23附录A 24前言智能汽车,是一种集环境感知、规划决策、自动行驶等功能于一体的综合系统,集中地应用到自动控制、模式识别、传感器技术、汽车电子、电气、计算机、机械等多个学科,是典型的高新技术综合体,具有重要的军用及民用价值。
目前,智能车领域的研究已经能够在具有一定标记的道路上为司机提供辅助驾驶系统甚至实现无人驾驶。
这些智能车的设计通常依靠特定道路标记完成识别,通过推理判断模仿人工驾驶进行操作。
通常,智能车接受辅助定位系统提供的信息完成路径规划,如由GPS等提供的地图,交通拥堵状况,道路条件等信息。
本文内容的安排如下所示:第一章引言本章主要介绍了Freescale 车模竞赛的基本情况,智能汽车的发展状况。
第二章系统整体框架本章对系统硬件模块方案和软件控制方法进行了选择与论证。
第三章机械结构的安装与调整本章对机械结构的安装与改进,各个模块的安装技巧作了详细的介绍。
第四章硬件电路的设计与实现本章主要介绍了自行设计的基于飞思卡尔单片机的最小系统板的设计、电源模块、摄像头模块和速度传感器模块的设计与实现。
第五章软件系统设计与实现本章软件系统各模块的设计思路作了详细的介绍。
特别介绍了图像处理中的各种技巧、PID 控制策略的应用和起跑线识别算法的设计等问题。
第六章开发工具及其调试本章对开发工具与调试方法作了简单介绍。
结论对整个参赛过程中的经验与教训作了总结。
第1章系统设计概述1.1系统设计原理电机驱动模块MC9S12XS128图像采集模块硬件电路是整个系统的基础,下面是我们的硬件电路原框图:舵机驱动模块速度采集模块速度采集模块速度采集模块图1.1整体框架1.2系统软件开始系统的软件流程图1.2初始化图像采集图像处理舵机控制电机控制图1.2系统流程图1.3方案简介在本次比赛中,组委会提出了3种单片机可供选择MC9S12XS128,MC9S12DG128和9S08AW60.我们选择了总线频率较高的MC9S12XS128作为主控芯片,并且自己制作了最小系统板。
图像采集我们经过对比最终选择了CMOS的OV6620作为图像采集传感器。
将图像采集来后,为了减小干扰首先我们对整幅进行了二值化,然后利用跟踪边缘的算法对黑线进行提取。
最终使得黑线的变化更加平稳。
提取出黑线后,我们采用了模糊控制与PD控制相结合的方式对舵机进行控制,让小S直接冲过去,大S尽量内切,最大难度的发卡弯沿线通过。
在硬件方面,我们为了使电路更加简化,自己制作了最小系统板,使得单片机,电源,电机驱动等模块集中到了一块最小的系统板上。
第2章硬件电路的设计与实现硬件电路主要包括:电源模块,驱动模块与调试模块。
电源模块主要包括单片机电源,编码器电源,摄像头电源,舵机电源等等。
驱动模块主要包括电机驱动和舵机驱动。
调试模块主要包括BDM下载和串口的设计。
2.1最小系统板设计我们采用了MC9S12XS128芯片作为主控芯片,参考了组委会提供的系统板的原理图,自行设计了最小系统板和外围器件的电路,同时为了尽可能的减小板子的质量与大小,我们没有将串口设计到最小系统板上,而是另外做了一块USB转串口的电路板。
原理图如图2.1和2.2图2.1最小系统板原理图引脚功能介绍:PORTB: LED状态指示PORTM:摄像头数据采集口PORTK:模式选择口PP1:舵机控制PP2:电机控制口PP3:电机控制口TXDO:串口通讯RXDO:串口通讯2.2电源模块为了保证各个部件的正常工作,电源的供给是十分主要的,需要对配发的标准车模用蓄电池进行电压调节。
单片机系统,摄像头,车速传感器电路等各个电路的工作电压不同,需要想办法来使得电压满足各自的要求,一种办法是利用升压或降压的芯片来达到它们的要求,另一种方法是利用双电源供电的方法,来实现自己各模块的不同需求,由于电路的模块较多,该方案中需要升压或降压芯片,实际应用中,我们确定采用升压降压芯片等来实现对各个模块的供电需求,而且,再电路设计中,考虑到由于电机驱动所引起的电源不稳定,在电源输入端,各芯片电源引脚都加入滤波电路。
如图2.3所示电源模块的组成图2.3电源模块的组成框图2.2.1 5v电源市场上常用的5V芯片有LM2940,LM7805,LM2575,LM2596其中LM2940和LM7805转换效率低(40%)输出波纹小,而且稳定,对于电源要求比较高的元件适合。
LM2575和LM2596转换效率高(75%~80%)输出波纹大,可能会让单片机出现重启。
所以我们选择前者而LM2940比LM7805压差小,而且更加稳定因此我们选择LM2940作为5V稳压芯片。
原理图如图2.4所示图2.4 5V稳压电路原理图2.2.2 6V电源舵机的响应速度与其电源电压有关。
因此,为了获得更快的响应速度,舵机的供电采用其工作上限电压+6V,舵机的工作电压4-6V,因此为了稳定起见我们给舵机也做了稳压电路,期间的选择的是LM2941.原理图如图2.5图2.5 舵机电源6V2.3数字摄像头OV66202.3.1 OV6620简介(1)、OV6620需要稳定的5V电压供电,和系统板上的供电电源兼容。
(2)、NAL制,每秒25帧,一帧两场,那么每秒就有50场。
意味着20MS就有一副图像产生。
356x292pixels,理解为:有292行,一行有356个点。
(3)、视野和可视距离:这个和镜头的选择有关,据我测试,f=3.6MM时视野应该有25度左右,f越大视场越小。
可视距离需要调节镜头焦距。
经我测试可视距离可以看到十几米,毕竟像素值只有10万多,用单片机读可以看到3-4M的距离。
这里解释一下为什么用单片机读会打折扣,因为线宽度只有2.5CM,太远了黑线会很细,采点之后就分辨不出是噪音还是有用信号了,在1米左右时,黑线宽度可用8个点表示。
(4)、内部有IIC可编程。
可以调整摄像头的参数,比如最大灰度,对比度,暴光率控制等等。
其本质是SCCB协议。
(5)、数据格式-YCrCb 4:2:2,GRB 4:2:2,RGB;电子曝光/增益/白平衡控制;内部自动图像增强,亮度,对比度,伽马,饱和度,锐度,加窗等。
最重要的是不需AD,不需1881.当然玩一下他的模拟输出一可以,VTO管脚就可以当普通的模拟摄像头用。
2.3.2 OV6620 和普通摄像头的对比模拟的优势比较明显:便宜,程序有现成的。
缺点:消耗MCU资源,功耗大,取点个数少,需要做12V的供电模块(最近有队伍说把摄像头上的5V稳压芯片取下来飞飞线就可以直接用5V供电),外围处理电路多,还要1881。
数字的优点就是避免了模拟的缺点。
行场同步中断信号有现成的,而且消隐区也十分有规律。
可以用示波器对比一下模拟的和数字的,数字的信号非常漂亮,非常稳定。
这对于图像采集来说是十分有利的。
最终我们选择了数字摄像头OV6620。
OV6620的管脚分布样子如图2.6和2.7所示:2.3.3 OV6620管脚说明图2.6管脚分布图图2.7 OV6620像头PIN1-PIN8 灰度信号输出接口 Y0-Y7PIN11 SCCB数据接口 SDAPIN12 奇偶场同步信号 FODDPIN13 SCCB数据时钟 SCLPIN14 行中断信号 HREFPIN16 场中断信号 VSYNPIN18 像素同步信号 PCLK(也叫TCLK)PIN32 模拟信号输出接口 VTO这里仅说明可能需要用到的管脚,模拟摄像头无非也就这几个信号,重要的是,模拟摄像头的信号线需要分离,这当然会给图像的采集带来本可以避免的干扰。