(详细)基于黑白摄像头的智能小车路径识别系统设计
- 格式:pdf
- 大小:703.81 KB
- 文档页数:4
基于摄像头的智能车路径识别方案摘要:本文按照第四届“飞思卡尔”杯全国大学生智能汽车邀请赛的技术要求,经过一段时间的资料的采集与样本电路的参照,本文主要介绍了车模的系统设计原理,系统软件,与方案简介。
在硬件电路的设计与实现中,描述了最小系统设计,电源模块,并且着重描述数字摄像头OV6620,在软件系统设计中,讲述了时钟模块,ECT模块,图像采集以及图像处理等内容,经过实践证明,这些理论方案都可以得到证明,能使汽车稳定快速运行。
关键字:智能车;摄像头;电源模块;图像采集The identification of intelligent vehicle path of program is based on CameraAbstract:This article in accordance with the 4th "flying to Karl" Cup National University SMART Car Invitational technical requirements for the time of the information gathering and sample circuits in the light of this article introduces the car model system design principles, system software, and the programme profile. On the hardware circuit design and implementation, describes the minimum system design, power supply, with emphasis on described digital camera OV 6620 in software design of the system on the clock module, ECT modules, image acquisition and image processing, the practice has proved that these theories programmes can be proved that auto steady and rapid operationKeywords: SMART cars; camera; power supply; image acquisition目录前言 4第1章系统设计概述 51.1系统设计原理 51.2系统软件 61.3方案简介 6第2章硬件电路的设计与实现 72.1最小系统板设计 72.2电源模块 82.2.1 5v电源 92.2.2 6V电源 92.3数字摄像头OV6620 102.3.1 OV6620简介 102.3.2 OV6620 和普通摄像头的对比 102.3.3 OV6620管脚说明 112.3.4 OV6620图像采集 11第3章软件系统设计 143.1 时钟模块 143.2 ECT模块 143.3 图像采集 163.4 图像处理 173.4.1 二值化算法 175.4.2 黑线提取流程 19结论 21致谢 22参考文献 23附录A 24前言智能汽车,是一种集环境感知、规划决策、自动行驶等功能于一体的综合系统,集中地应用到自动控制、模式识别、传感器技术、汽车电子、电气、计算机、机械等多个学科,是典型的高新技术综合体,具有重要的军用及民用价值。
基于黑白摄像头的智能小车路径识别系统设计The Design of Intelligent V eh icle Path Recognition Based on M onochro m e Camera吴吟箫* 张 虹 王新生W U Y i n -x i ao Z H AN G H ong WANG X in -sheng do:i 10.3969/.j issn .1672-9528.2009.02.015摘 要路径识别是汽车智能化发展的必然趋势。
在基于飞思卡尔单片机的智能车路径识别系统的设计中,首先采用基于黑白摄像头的图像采样模块获取路径图像信息;然后分别说明图像采集,图像预处理,黑线提取,路径判断部分的软件设计。
其中,在图像预处理中使用了二值化和中值滤波算法,并且在黑线提取中提出了改进插值算法。
实验表明,整个系统硬件设计简单,软件算法快速有效。
关键词路径识别 中值滤波 寻线算法Abstract Inte lli gentize of vehic l e is a trend o f cars develop m ent in the future .P ath recogn ition i s one o fthe appli cation d i rections .Th is pa t h recogn iti on syste m of i ntelli g ent car uses i m age -sensor m odu l e based on ca m era to obta i n lane i m age i n f o r m ati on .The who le syste m i s d i v i ded into f our parts :i m age acqu i s ition ,i m age pre-pro cessi ng ,abstracting t he black li ne ,and road detec tion .The i m age pre-pro cessi ng part uses the b i nary zation and t he m ed ian filter i ng to i m prove the i m age i n f o r m ati on .Then by us i ng the i m proved a l go rith m,the resu lt of abstracting t he black li ne becomes m ore prec i se .The ulti m ate a i m of the w ho le syste m i s to accurate l y abstract the b l ack gu i de li nes fro m the wh ite race w ay ,f o ll ow i ng the road pa ra m e ters and conditi ons i n front ,m aki ng the car m ove prope rly .K ey word s R oad detecti on M ed i an filteri ng L i ne-tracking*哈尔滨工业大学(威海)信息科学与工程学院 264209基金项目:山东省自然科学基金(Y 2007G 20)1 引言智能化技术与汽车相结合产生的智能汽车将在未来工业生产和日常生活中扮演重要的角色,而路径识别则正是体现智能车智能水平的一个重要标志。

基于摄像头的智能车路径识别方案摘要:智能车硬件平台开采用飞思卡尔 16 位微控制器 MC9S12DG128 为核心的控制单元,由清华大学飞思卡尔嵌入式系统研发中心提供的开发板MC9S12EVKC 单片机最小系统板,并在此基础上自行完成的外围硬件电路设计;软件开发环境使用Metrowerks 公司为 MC9S12 系列单片机专门提供的全套开发工具 CodeWarrior IDE。
文中介绍了智能车的系统总体结构,软硬件模块及开发流程。
其中重点介绍摄像头的硬件电路的设计,摄像头输出数字信号的采集,视频图像信号处理及控制系统硬件电路设计,速度与转向控制算法,以及包括调试中遇到的问题的解决方法。
关键字:智能车,摄像头,视频数据采集,路径识别,速度与转向控制Intelligence Car Based On Digital Camera Abstract:In this article, article present the embedded systems design results of Wuxi professional collage of science and technology zhenze motorcade working during the period of preparing the fourth session of the Freescale Intelligence Car Competition, Including hardware design, software design of smart car. the hardware platform of the smart car bases on S12 development board which features MC9S12DG128 micro-controller, Freescale Embedded Systems, Tsinghua University R & D Center provides the development board of the smallest single-chip system board MC9S12EVKC, And on this basis to the completion of the external hardware circuit design software development environment software development used Code warrior IDE as its tool, which is Metrowerks Corporation technically provide a complete set of development tools to MC9S12 series of single-chip.This article introduces the intelligent car systems architecture, software and hardware modules and development process, Which focuses on Camera hardware circuit design, Camera output digital signal collection, Video image signal processing, Control system hardware circuit design, speed and direct control algorithm, As well as the solution of problem in debugging.Key Word: Intelligent car, Camera, Video Sample Collection, Speed and Direct Control目录第一章绪论 (3)1.1课程意义 (3)1.2课题背景 (3)1.3任务 (4)第二章硬件系统设计 (5)2.1单片机主要元件介绍 (5)2.1.1 摄像头的介绍 (5)2.2硬件总体框图 (6)2.2.1 电源、稳压电路 (7)2.2.2 单片机控制板 (9)2.2.3 测速电路 (10)2.2.4 摄像头电路 (10)2.2.5 舵机电路 (11)2.2.6 软件方案选择电路 (11)2.2.7 电机驱动电路 (12)2.2.8 调试电路 (13)第三章软件系统设计 (14)3.1软件总体框架 (14)3.2图像采集与处理 (14)3.2.1 采集方法 (14)3.2.2 路径识别 (17)3.3速度和方向的控制 (21)3.3.1 PID算法介绍 (21)3.3.2 闭环控制 (23)谢辞 (24)参考文献 (24)第一章绪论1.1 课程意义通过智能车的软硬件设计,较为深入的了解嵌入式设计,提升自己的知识层面,拓展自己的思维,增强自己的动手能力,提高团队协作能力,为以后向嵌入式方向发展打下一定的基础。
智能寻迹避障小车寻迹系统设计文档编制序号:[KKIDT-LLE0828-LLETD298-POI08]第二章智能寻迹避障小车寻迹系统设计1.任务任务一:产生智能寻迹避障小车沿黑线转圈的控制程序;任务二:产生智能寻迹避障小车带状态显示沿黑线转圈的控制程序;2.要求(1)能控制智能寻迹避障小车沿黑线实现转圈功能;(2)行走过程中小车一直压着黑线走,不得冲出黑线圆圈之外或之内;(3)智能寻迹避障小车可以从小于90度的任意方向寻找到黑线圆圈;项目描述该项目的主要内容是:在智能寻迹避障小车电机控制系统之上扩展寻迹电路,然后运用C语言对系统进行编程,使智能寻迹避障小车实现沿黑线转圆圈的功能,并且在行走过程中小车一直压着黑线走,不得冲出黑线圆圈之外或之内;当人为将小车拿开,再从小于90度的任意方向放置小车,小车应能重新找回轨道,并沿黑线继续转圈。
通过该项目的学习与实践,可以让读者获得如下知识和技能:继续掌握单片机I/O端口的应用;掌握红外线收、发对管的工作原理与控制方法;掌握数码管的工作原理与控制方法;掌握单片机C语言的编程方法与技巧;能够编写出智能寻迹避障小车沿黑线实现转圈功能的控制函数;必备知识2.1.1 关于红外线传感器红外线定义:在光谱中波长自至400微米的一段称为红外线,红外线是不可见光线。
所有高于绝对零度(℃)的物质都可以产生红外线。
现代物理学称之为热射线。
医用红外线可分为两类:近红外线与远红外线。
红外线发射器:红外线发射管在LED封装行业中主要有三个常用的波段,如下850NM、875NM、940NM。
根据波长的特性运用的产品也有很大的差异,850NM波长的主要用于红外线监控设备,875NM主要用于医疗设备,940NM波段的主要用于红外线控制设备。
如:红外线遥控器、光电开关、光电计数设备等。
红外线对管应用:本项目中,小车的寻迹功能采用红外线收、发对管实现。
具体工作过程如下:两对红外线收、发对管安装在智能寻迹避障小车底盘正前方,红外发射管一直发射信号,接收管时刻准备接收信号。
---文档均为word文档,下载后可直接编辑使用亦可打印---绪论1.1 课题背景目前,在企业生产技术不断提高、对自动化技术要求不断加深的环境下,智能车辆以及在智能车辆基础上开发出来的产品已成为自动化物流运输、柔性生产组织等系统的关键设备。
世界上许多国家都在积极进行智能车辆的研究和开发设计。
智能车辆也叫无人车辆,是一个集环境感知、规划决策和多等级辅助驾驶等功能于一体的综合系统。
它具有道路障碍自动识别、自动报警、自动制动、自动保持安全距离、车速和巡航控制等功能。
智能车辆的主要特点是在复杂的道路情况下,能自动地操纵和驾驶车辆绕开障碍物并沿着预定的道路(轨迹)行进。
智能车辆在原有车辆系统的基础上增加了一些智能化技术设备:1)计算机处理系统,主要完成对来自摄像机所获取的图像的预处理、增强、分析、识别等工作。
2)摄像机,用来获得道路图像信息。
3)传感器设备,车速传感器用来获得当前车速,障碍物传感器用来获得前方、侧方、后方障碍物等信息。
智能车辆作为移动机器人的一个重要分支正得到越来越多的关注。
1.2 国内外发展现状及趋势智能化作为现代社会的新产物,是以后的发展方向,他可以按照预先设定的模式在一个特定的环境里自动的运作,无需人为管理,便可以完成预期所要达到的或是更高的目标。
同遥控小车不同,遥控小车需要人为控制转向、启停和进退,比较先进的遥控车还能控制其速度,而智能小车,则可以通过计算机编程来实现其对行驶方向、启停以及速度的控制,无需人工干预,是一个集环境感知、规划决策,自动行驶等功能于一体的综合系统,它集中地运用了计算机、传感、信息、通信、导航、人工智能及自动控制等技术,是典型的高新技术综合体。
国外智能车辆的研究历史较长。
它的发展历程大体可以分成三个阶段:第一阶段 20世纪50年代是智能车辆研究的初始阶段。
1954年美国BarrettElectronics 公司研究开发了世界上第一台自主引导车系统AGVS(Automated Guided Vehicle System)。
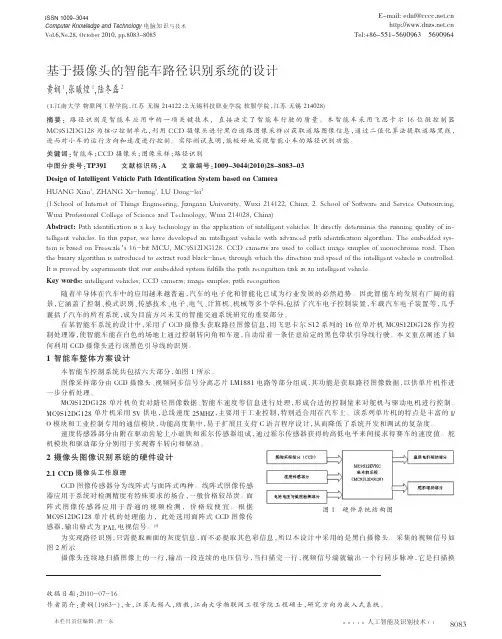
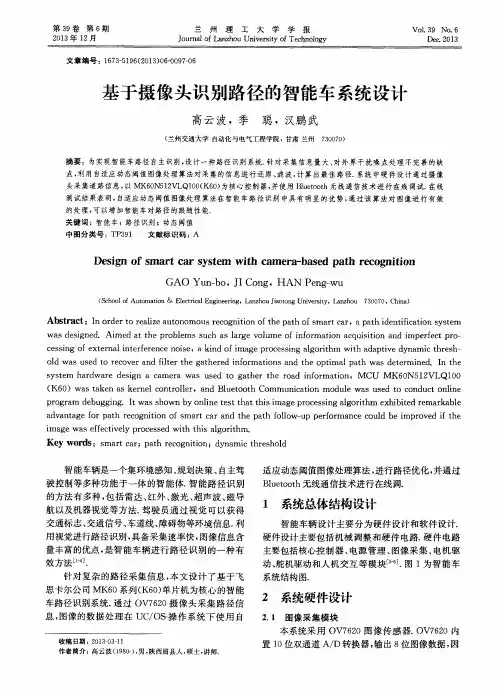
Computer Knowledge and Technology 电脑知识与技术人工智能及识别技术本栏目责任编辑:唐一东第6卷第28期(2010年10月)基于摄像头的智能车路径识别系统的设计黄娴1,张曦煌1,陆冬磊2(1.江南大学物联网工程学院,江苏无锡214122;2.无锡科技职业学院软服学院,江苏无锡214028)摘要:路径识别是智能车应用中的一项关键技术,直接决定了智能车行驶的质量。
本智能车采用飞思卡尔16位微控制器MC9S12DG128为核心控制单元,利用CCD 摄像头进行黑白道路图像采样以获取道路图像信息,通过二值化算法提取道路黑线,进而对小车的运行方向和速度进行控制。
实际测试表明,能较好地实现智能小车的路径识别功能。
关键词:智能车;CCD 摄像头;图像采样;路径识别中图分类号:TP391文献标识码:A 文章编号:1009-3044(2010)28-8083-03Design of Intelligent Vehicle Path Identification System based on CameraHUANG Xian 1,ZHANG Xi-huang 1,LU Dong-lei 2(1.School of Internet of Things Engineering,Jiangnan University,Wuxi 214122,China;2.School of Software and Service Outsourcing,Wuxi Professional College of Science and Technology,Wuxi 214028,China)Abstract:Path identification is a key technology in the application of intelligent vehicles.It directly determines the running quality of in -telligent vehicles.In this paper,we have developed an intelligent vehicle with advanced path identification algorithm.The embedded sys -tem is based on Freescale ’s 16-bit MCU,D cameras are used to collect image samples of monochrome road.Then the binary algorithm is introduced to extract road black-lines,through which the direction and speed of the intelligent vehicle is controlled.It is proved by experiments that our embedded system fulfills the path recognition task as an intelligent vehicle.Key words:intelligent vehicles;CCD cameras;image samples;path recognition随着半导体在汽车中的应用越来越普遍,汽车的电子化和智能化已成为行业发展的必然趋势。
基于摄像头的智能循迹小车控制算法设计智能循迹小车的设计包括车的机械结构设计,硬件电路设计和控制算法设计三个方面。
文章采用模糊控制和PID算法进行电机和舵机的控制,完成智能循迹小车的控制算法设计。
该控制算法能够使得智能循迹小车在指定赛道内完成自动行驶的功能,达到设计要求。
标签:算法设计;智能循迹小车;行驶控制引言随着人工智能技术的发展,智能行车软件开发已成为计算机科学领域的研究热点之一,许多的实验平台和驾驶辅助系统已经开发出来。
自动驾驶的实现需要依靠人工智能、视觉计算、雷达、监控装置和全球定位系统协同合作,让电脑可以在没有任何人类主动的操作下,自动安全地操作机动车辆。
基于摄像头的智能循迹小车的设计与控制软件研发是探索自动驾驶技术的一种有效途径,它以摄像头为路况监测传感器,完成在指定道路上的不同任务。
智能循迹小车的设计与控制软件研发主要包含三个基本方面[1-3]:机械结构的设计、硬件系统的搭建、软件系统的编写。
机械结构调整模仿汽车的机械结构,包括重心调整,前轮定位等。
硬件电路的设计遵从可靠性,稳定性和完整性,设计出一套符合要求的硬件电路。
软件设计通过道路识别算法和控制算法完成控制,同时以大量的赛道数据为基础保证了智能车的稳定性。
1 智能循迹小车的机械结构小车的机械结构主要由电机,底盘,舵机和摄像头四个部分构成。
在智能车底板与后驱动模块之间增加垫片可以降低底盘离地的间隙,为了保证智能车在弯道行驶时不发生侧滑,底盘离地的间隙应该是越小越好,但还要考虑车模在坡道处底盘不会碰到赛道,经过实验设置底盘离地间隙为8mm。
舵机采用前置悬置方式安装,使摆臂和舵机始终处于同一个水平面,有利于转向的灵活性,缩短舵机反应时间。
智能车CMOS摄像头的安装主要考虑了三个因素[4-5]:首先,保证摄像头的位置绝对居中且正对前方;其次,在安装高度上要尽量高,获取足够多的路况信息;最后,近瞻距离智能车20CM之内,用来保证智能车不偏离赛道。
基于视觉感知的自动小车跟踪系统设计与实现1. 系统概述基于视觉感知的自动小车跟踪系统旨在通过摄像头采集到的实时图像识别和分析,实现对目标小车的跟踪和追踪控制。
该系统主要包括图像采集模块、目标检测与识别模块、路径规划与控制模块等。
2. 图像采集模块图像采集模块负责从摄像头中获取实时图像数据。
可以使用USB摄像头或者专用的图像采集设备,并通过相关的软件库进行图像数据的采集与处理。
在设计过程中,应选用合适的设备和算法来保证图像质量和实时性。
3. 目标检测与识别模块目标检测与识别模块是核心模块之一,用于对图像中的小车进行识别和定位。
常用的目标检测算法包括基于特征的方法(如Haar特征、HOG特征)和基于深度学习的方法(如卷积神经网络)。
根据实际需求和系统性能,选择合适的算法进行目标检测与识别。
4. 路径规划与控制模块路径规划与控制模块负责根据目标小车的位置信息,通过调节小车的转向和速度,实现对目标小车的跟踪和追踪控制。
常用的路径规划算法包括PID控制、模糊控制和自适应控制等。
根据系统要求和实际情况,选择合适的算法进行路径规划与控制。
5. 系统集成与优化在完成各个模块的设计与实现后,需要将其进行集成并进行系统优化。
集成时要确保模块之间的数据传输和信息交互正常可靠,优化则是对系统整体效果进行调试和改善。
通过实际测试和参数调整,提高系统的稳定性、准确性和实时性。
6. 系统应用拓展基于视觉感知的自动小车跟踪系统可以应用于许多领域,如智能仓储系统、无人驾驶等。
在具体应用中,可以根据实际需求进行功能拓展和性能优化,例如增加目标识别的分类数量、增强图像处理的实时性等。
7. 系统应用前景基于视觉感知的自动小车跟踪系统具有广阔的应用前景。
随着人工智能和计算机视觉技术的不断发展,这种系统将在物流仓储、智能交通、工业自动化等领域得到更为广泛的应用。
总结:基于视觉感知的自动小车跟踪系统设计与实现涉及图像采集、目标检测与识别、路径规划与控制以及系统集成与优化等多个模块。
智能寻迹小车设计方案智能寻迹小车设计方案一、项目概述智能寻迹小车是一种能够自主行走并根据黑线路径进行导航的小型机器人。
本设计方案旨在实现小车的自主控制和路径识别功能,为用户提供一个可以根据预定路径行走的智能小车。
二、技术原理智能寻迹小车的核心技术包括光电传感器模块、控制模块和驱动模块。
光电传感器模块用于感知黑线路径,控制模块用于辨识路径信号并控制小车的行走方向,驱动模块用于控制小车的轮子转动。
小车通过光电传感器模块获取黑线路径的信号,经过控制模块的处理后,驱动模块控制轮子的转动实现小车的行走。
三、硬件配置1. 光电传感器:用于感知黑线路径,采用多个红外线光电二极管和光敏二极管进行测量。
2. 控制模块:采用单片机作为控制核心,用于接收和处理光电传感器的信号,并根据信号控制车轮转动。
3. 驱动模块:采用直流电机作为驱动装置,驱动车轮的转动。
四、软件架构1. 信号处理算法:根据光电传感器模块的输出信号,设计信号处理算法,将感知到的黑线路径转化成可识别的控制信号。
2. 路径识别算法:分析感知到的黑线路径信号,识别出黑线的走向,并根据识别结果控制小车的行走方向。
3. 控制算法:根据路径识别算法的结果,控制驱动模块产生适当的电压,实现小车轮子的转动。
五、功能实现1. 自主行走功能:小车能够根据识别的黑线路径自主地行走,避免碰撞障碍物或偏离路径。
2. 路径识别功能:小车能够准确地识别黑线路径,并根据路径进行相应的控制。
3. 远程控制功能:用户可以通过无线遥控器对小车进行远程控制,包括行走方向和速度的控制。
六、性能指标1. 导航准确性:小车在正确识别黑线路径的情况下完成整个行程,保持在路径上的偏离范围小于5mm。
2. 响应速度:小车对路径信号的处理和控制反应时间小于100ms。
3. 可靠性:小车在连续行走1小时内不发生故障,并能正常完成指定的行走任务。
七、安全性考虑1. 碰撞检测:小车装配超声波传感器,能够检测前方的障碍物并自动停止行走,避免碰撞事故的发生。
万方数据万方数据瞄董j磁&圜匡豆可.堡星篁查墨堡皇鱼可以消除影响。
因而从去噪效果和计算量两方面来考虑,lx3模板中值滤波更具有优势。
4黑线中心提取提取黑线中心部分是小车路径识别系统中最为重要的一个环节,关系到智能小车运行质量的好坏。
这里黑线中心提取方法为:先判断每行的第一个点是否为自点,如是白点则依次对白点进行计数(设计数为a,当遇到连续黑点时则计数黑点个数(设计数为b,再次遇到白点时则退出该行计数,此时黑线中心所在列为a+b/2;如果第一个为黑点,且不是噪声点(即为连续的黑点,则直接对黑点计数(设计数为b,当遇到连续白点后则退出计数,这种情况下得到的黑线中心位于第b/2列。
最后将从一幅图像上得到的所有中心位置按行存人一个一维数组中。
但是不得不考虑两种比较特殊的情况,起始线和十字交叉线。
通过观察发现这两种情况下每行出现黑点的数量远远大于黑线的黑点数(黑线一般能采集到2—3个黑点,所以当采集到的黑点数超过正常值时,便判定这一行为特殊行,并赋予特殊标志位(这里将特殊行中心点标志为50,因为经过图像处理后图像变成38}20数组,标志为50能将特殊点和正常点很明显的区分开,也方便了下面的改进差值算法。
由于规则要求小车能识别起始线,因而还需对特殊行进行分析。
图7为采到起始线的情况,可以看出起始线所在行具有多个跳变,考虑到车体偏离等情况,可以用白点跳变为黑点的次数(方案中选2或3来判定是否为起始线,如果符合情况则标志出这一行。
则其他的特殊行均为十字交叉情况。
虽然在前面已经有去噪处理,但是偶尔还是会有干扰,这样提取出来的某些行黑线中心位置就发生了跳变。
同时,为了后续的控制模块得到准确的道路信息,需要对特殊行及跳变点进行插值处理,即赋予其前后两行的平均值作为黑线中心值。
但是考虑到会出现这样的复杂情况:连续两行出现跳变点或者特殊行的前后出现跳变点,这时如果简单的按上面的方法进行插值,会插入一个误差很大的中心点,使道路产生弯点。
基于STM32的智能小车摄像头循迹系统_毕业设计论文精品智能小车摄像头循迹系统是基于STM32单片机开发的一种智能控制系统,在汽车行驶过程中利用摄像头采集车辆所在位置信息,并根据此信息实现车辆的自动导航。
本文将介绍该系统的设计流程、硬件架构和软件开发。
一、设计流程1.系统需求分析:确定系统的功能需求,包括摄像头采集图像、图像处理和车辆导航等。
2.系统设计:根据需求确定系统的硬件和软件设计方案。
3.摄像头选型与接口设计:选择合适的摄像头模块,并实现与STM32的接口设计。
4.图像采集与处理:利用摄像头采集图像,并通过图像处理算法提取车辆所在位置信息。
5.车辆导航算法设计:根据图像处理的结果,设计车辆导航的控制算法。
6.系统实现与调试:将各个模块进行集成,完成系统的硬件搭建和软件编程,并进行调试和测试。
二、硬件架构该系统主要包括STM32单片机、摄像头模块、电机驱动模块和车辆控制模块。
1.STM32单片机:负责系统的整体控制和图像处理,并根据图像处理的结果发送控制信号给电机驱动模块。
2.摄像头模块:通过图像传感器采集图像,并将图像数据传输给STM32单片机进行处理。
3.电机驱动模块:根据STM32单片机发送的控制信号,控制车辆的运动方向和速度。
4.车辆控制模块:用于接收电机驱动模块发送的控制信号,并控制车辆的运动。
三、软件开发1. 嵌入式软件开发:使用Keil或IAR等开发工具,编写STM32单片机的软件程序,实现图像采集、图像处理和车辆导航等功能。
2.图像处理算法设计:根据摄像头采集到的图像,设计图像处理算法,提取车辆所在位置信息。
3.车辆导航算法设计:根据图像处理的结果,设计车辆导航的控制算法,计算控制信号发送给电机驱动模块。
4.系统集成与调试:将上述软件程序上传到STM32单片机,并将各个硬件模块进行连接和调试,确保系统能够正常工作。
综上所述,基于STM32的智能小车摄像头循迹系统是一种基于图像处理的智能控制系统,通过摄像头采集车辆位置信息并实现自动导航。
基于摄像头的智能车路径识别方案摘要:本文按照第四届“飞思卡尔”杯全国大学生智能汽车邀请赛的技术要求,经过一段时间的资料的采集与样本电路的参照,本文主要介绍了车模的系统设计原理,系统软件,与方案简介。
在硬件电路的设计与实现中,描述了最小系统设计,电源模块,并且着重描述数字摄像头OV6620,在软件系统设计中,讲述了时钟模块,ECT模块,图像采集以及图像处理等内容,经过实践证明,这些理论方案都可以得到证明,能使汽车稳定快速运行。
关键字:智能车;摄像头;电源模块;图像采集The identification of intelligent vehicle path of program is based on CameraAbstract: This article in accordance with the 4th "flying to Karl" Cup National University SMART Car Invitational technical requirementsfor the time of the information gathering and sample circuits in the light of this article introduces the car model system design principles, system software, and the programme profile. On the hardware circuit design and implementation, describes the minimum system design, power supply, with emphasis on described digital camera OV 6620 in software design of the system on the clock module, ECT modules, image acquisition and image processing, the practice has proved that these theories programmes can be proved that auto steady and rapid operationKeywords: SMART cars; camera; power supply; image acquisition目录前言 4第1章系统设计概述 51.1系统设计原理 51.2系统软件 61.3方案简介 6第2章硬件电路的设计与实现 72.1最小系统板设计 72.2电源模块 82.2.1 5v电源 92.2.2 6V电源 92.3数字摄像头OV6620 102.3.1 OV6620简介 102.3.2 OV6620 和普通摄像头的对比 10 2.3.3 OV6620管脚说明 112.3.4 OV6620图像采集 11第3章软件系统设计 143.1 时钟模块 143.2 ECT模块 143.3 图像采集 163.4 图像处理 173.4.1 二值化算法 175.4.2 黑线提取流程 19结论 21致谢 22参考文献 23附录A 24前言智能汽车,是一种集环境感知、规划决策、自动行驶等功能于一体的综合系统,集中地应用到自动控制、模式识别、传感器技术、汽车电子、电气、计算机、机械等多个学科,是典型的高新技术综合体,具有重要的军用及民用价值。