车辆动力传动系统弯扭耦合振动模型的建立及复模态分析(精)
- 格式:doc
- 大小:179.50 KB
- 文档页数:21


![[材料科学]55车辆振动模型](https://img.taocdn.com/s1/m/fed4e86fc850ad02de80419e.png)

动力传动系扭振激励的整车振动研究的开题报告一、研究背景随着汽车工业的发展,越来越多的车辆采用了前置后驱或四驱的动力传动形式。
这种传动系统由发动机、离合器、变速器、传动轴、差速器和驱动轮等组成。
在这些部件之间传递的扭矩和转速的变化会引起整车的扭振。
扭振会使车身产生周期性的共振,导致车辆的行驶稳定性受到影响,严重时还会影响驾驶员的驾驶体验和乘客的舒适性。
因此,研究动力传动系扭振激励的整车振动问题具有重要的理论和实际意义。
二、研究内容本研究拟研究动力传动系扭振激励的整车振动问题,具体包括以下内容:1.动力传动系扭振激励机理的分析和建模通过对动力传动系统的结构和工作原理进行分析,建立一种合理的动力传动系统扭振激励的数学模型,以定量描述动力传动系扭振激励对整车振动的影响。
2.整车振动模型的建立以4轮汽车为研究对象,建立一种适用于动力传动系统扭振激励的整车振动模型。
通过对车身、车轮、悬挂、轮胎等复杂结构的建模,分析整车在不同路面、不同振动激励下的运动状态和振动特性。
3.振动分析方法和实验设计应用Matlab、Simulink等软件,选择适当的振动分析方法,对动力传动系扭振激励的整车振动进行数值模拟,并设计一系列实验,验证数值模拟结果的准确性和可靠性。
4.参数敏感性分析针对整车振动模型中的主要参数,分析它们对系统响应的影响,并对参数的敏感性进行分析,确定关键参数。
三、研究目标本研究旨在探究动力传动系统扭振激励对整车振动特性的影响机理和规律,为改善以上问题提供理论和技术支持。
具体目标包括:1.解析动力传动系统扭矩传递特性及其激励规律,深入挖掘扭振源的本质;2.建立适用于动力传动系统扭振激励的整车振动模型,并对模型进行验证和优化;3.定量描述扭振激励对整车振动的影响,分析不同扭振激励下整车振动的特性和规律;4.分析整车振动模型中的主要参数,确定关键参数以指导相关工程实践。
四、研究方法本研究采用以下方法:1.文献综述法:对动力传动系统扭振激励的整车振动相关研究文献进行全面的调研和分析,从中总结出该领域存在的问题和需求。
车辆传动系的扭转振动的复合模型和仿真
A.范世典法 ;M.鄂伯黑弥 ;H.柏特勒
【期刊名称】《传动技术》
【年(卷),期】2003(017)002
【摘要】车辆传动系是一个小阻尼的非线性系统,具有不同分系统之间相互动态作用的多自由度.具有许多激振源,如在动力传动链中的间隙形成的扭转冲击,这样的激振源存在于传动系花键和差速器内的小齿轮对冠齿轮的传动间隙中.在慢速行驶中突然增加和释放油门或离合器的快速接合都可随之带来噪音和振动响应,涉及工业中的‘微冲'.本文介绍一种车辆传动系的模拟方法,它可以证实大家熟知的微振
‘Clonk'和‘慢动'现象.这种模拟是以车辆传动系可认为部分集总和部分分散的假定为基础,而对于这种装置是完全合适的.由此可以导出控制方程式的一个分析解,这是过去不曾研究过的.由该模拟求得的结果与可比车辆传动系总集成模型相比较.【总页数】9页(P37-45)
【作者】A.范世典法 ;M.鄂伯黑弥 ;H.柏特勒
【作者单位】无
【正文语种】中文
【中图分类】U463.2
【相关文献】
1.车辆-路面耦合振动系统模型与仿真分析 [J], 张丙强;李亮
2.汽车动力传动系扭转振动仿真模型简化方法 [J], 吕峰;李文睿;王东
3.轮式车辆传动系自激扭转振动仿真计算研究 [J], 葛剑敏;王佐民;郑联珠
4.汽车动力传动系扭转振动仿真模型简化方法 [J], 吕峰;李文睿;王东;;;
5.前置后驱车辆传动系统扭转振动建模仿真与优化 [J], 唐振天;刘夫云;耿立冬;余汉红;胡汝凯
因版权原因,仅展示原文概要,查看原文内容请购买。
第一章绪论第一章绪论1.1课题来源本课题来源于上海市科委基础研究重点资助项目(12JC1407000);上海汽车工业科技发展基金资助项目(1210)。
1.2课题研究背景汽车因为自身是一个质量、弹簧和阻尼系统,对汽车振动问题进行分析研究时,可以将其作为一个系统进行分析。
汽车内部的各个零部件固有频率都不相同,行驶时往往会由于路面不平度、行驶速度和运动方向的变化,车轮、发动机和传动系统之间的不平衡,再加上齿轮冲击等各种来自于外部和内部的激振,导致整车或局部产生强烈的振动[1]。
振动会使汽车的动力性、经济性、舒适性和使用寿命受到极坏的影响,发动机及其传动系统所引起的振动是汽车本身自振的重要原因之一。
轴系的扭转振动是汽车动力传动系统的主要振动形式之一,也是影响汽车整体性能的重要因素,是影响汽车NVH(Noise、Vibration&Harshness)性能的一个重要原因。
扭转振动将使汽车车身产生非常严重的振动和噪声,从而影响乘坐舒适性。
当发生共振时,扭振振幅和零件应力会发生急剧的增大,零件应力甚至可能达到平常应力的好几倍,传动系统各个零部件发生撞击、点蚀或断齿等现象,导致连接器件受到破坏,并最终中断车辆动力的传递[2]。
本课题基于某款直列4缸前置后驱7座商用车在标准水泥路面进行夏季路试时,当测试人员快速从2档切换至4档的时候,突然明显感受到车身抖动和明显噪声。
后进过多次测试发现当该车发动机在3档附近并转速达到1800rpm附近时,车身明显产生抖动伴随车内booming。
整车厂对随车测试的数据进行分析后发现是传动系统在该转速段有频响波峰。
但是由于整车系统庞大,常规的测试方即使测得了振动信号也不能确定是哪里产生的振动。
大量的元件谐振,反馈信号多,干扰信号多,无法对解决这一工程问题提供任何帮助。
故本文以此项目为题建立传动系统轴系的振动模型,分析轴系的振动机理,并利用试验和仿真等方法进行分析,了解和掌握汽车轴系的振动规律,为汽车的动力上海理工大学硕士学位论文传动系统设计提供参考,具有实际的工程应用意义,也为寻找和解决这一振动问题提供依据和方案。
车辆多自由度振动系统的建立【摘要】为了评价汽车的平顺性,建立了汽车七自由度振动模型。
通过拉格朗日方程推导出了数学模型。
依托MATLAB软件,结合编程语言与SIMULINK 平台仿真分析了模型的频域响应和时域响应。
结果表明,此种多自由度振动模型符合实车情况。
【关键词】车辆;多自由度;振动模型1.引言随着生活水平的提高和生活节奏的加快,人们对汽车乘坐舒适性的要求越来越高[1]。
汽车平顺性是影响汽车乘坐舒适性的重要原因[2]。
所谓汽车平顺性是指汽车在一般行驶速度范围内行驶时,能保证成员不会因车身振动而引起不舒服和疲劳的感觉,以及保证所运货物完整无损的性能[3]。
车辆的振源主要有路面不平度,发动机,传动轴不平衡,轮胎以及侧向风的激励[4]。
一般汽车参数模型越多就越接近实际情况;然而参数过多就会导致模型复杂,求解困难[5]。
因此,合理选择车辆振动系统的自由度数至关重要。
2.汽车多自由度振动系统模型在汽车振动模型中,前轮与后轮可以近似为弹簧;前悬架与后悬架可以近似为弹簧与阻尼的并联;驾驶员座椅可以近似为弹簧与阻尼的并联;动力总成前悬置与后悬置同样可以近似为弹簧与阻尼的并联,如图1所示。
此模型具有七个自由度:前轮跳动,后轮跳动,车身跳动,车身俯仰,座椅跳动,动力总成跳动,动力总成俯仰。
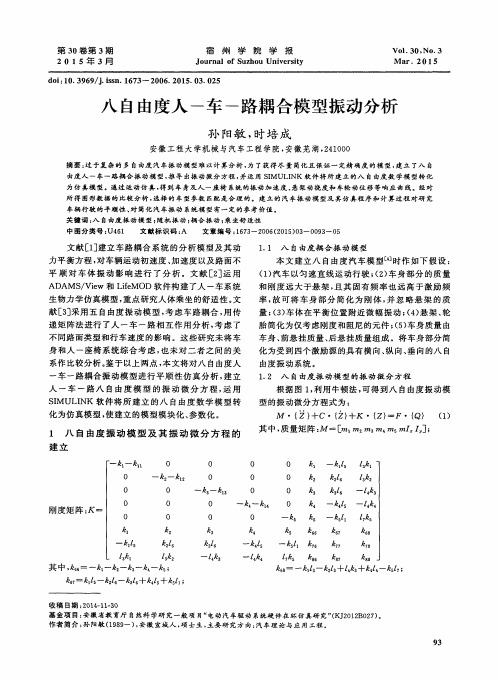
模型中参数:mb为车身质量,Ib为车身绕惯性轴的转动惯量;kf为前悬架刚度,cf为前悬架阻尼,lf为前悬架到质心的距离,kr为后悬架刚度,cr为后悬架阻尼,lr为后悬架到质心的距离;mtf为前轮胎质量,ktf为前轮胎刚度,mtr为后轮胎质量,ktr为后轮胎刚度;mp为动力总成质量,Ip为动力总成绕惯性轴的转动惯量,lp为动力总成质心至汽车车身质心的水平距离,kp1为动力总成前悬置刚度,cp1为动力总成前悬置阻尼,lp1为动力总成前悬置到汽车质心的水平距离,kp2为动力总成后悬置刚度,cp2为动力总成后悬置阻尼,lp2为动力总成后悬置到汽车质心的水平距离;ms为座椅系统等效质量,ks为座椅系统等效刚度,cs为座椅系统等效阻尼,ls为座椅系统距离质心位置的水平距离;qf为来自于地面的前轮激励刚度,qr为来自于地面的后轮激励刚度。
车-桥耦合系统动力学建模与响应分析
车-桥耦合系统动力学建模与响应分析
车辆行驶过桥时,车与桥之间存在相互耦合作用.本文根据车的三种简化模型,分别建立了车与桥结构相互耦合作用的动力学模型,并给出桥结构在两轴车载荷作用下的动响应计算方法,该方法很容易推广到更一般的多轴车载荷作用的情况.文中通过数值算例计算了基于车的三种简化模型桥梁的响应,将三种计算结果与实验数据比较,证明二自由度的车简化模型为最优,此时桥梁的弯矩响应与实验结果能较好地吻合.
作者:秦远田陈国平余岭张方 Qin Yuantian Chen Guoping Yu Ling Zhang Fang 作者单位:秦远田,陈国平,张方,Qin Yuantian,Chen Guoping,Zhang Fang(南京航空航天大学,210016,南京)
余岭,Yu Ling(长江科学院爆破与振动研究所,430010,武汉)
刊名:应用力学学报 ISTIC PKU英文刊名:CHINESE JOURNAL OF APPLIED MECHANICS 年,卷(期):2008 25(1) 分类号:O322 关键词:车辆桥梁动力学模型响应。
第46卷第24期机械工程学报Vbl.46No.242010年12月JOURNALOFMECHANICALENGINEERINGDec.20l0DoI:10.3901/JME.2010.24.067车辆动力传动系统弯扭耦合振动模型的建立及复模态分析水刘辉项昌乐孙恬恬(北京理工大学车辆传动国家重点实验室北京100081)摘要:以某履带车辆的多轴齿轮动力传动系统为研究对象,按照一定的简化原则建立多自由度的弯扭耦合振动力学模型,并针对弯扭耦合振动力学模型的特点,利用有限元理论与数学模型的相结合,在ANSYS中建立考虑齿轮的啮合刚度和啮合阻尼,以及轴承的支承刚度和油膜阻尼的有限元模型,对有限元模型进行有阻尼的复模态计算,并对弯扭耦合振动特性进行分析。
探讨耦合模态中的振动形式以及模态参与因子和有效质量,研究齿轮时变啮合刚度和啮合阻尼对多轴齿轮动力传动系统弯扭耦合振动模态的影响情况。
对齿轮传动系统进行弯扭耦合振动台架试验,将试验数据与仿真计算结果进行对比,验证了有限元模型的正确性,为进一步的动力学分析奠定了基础。
关键词:动力传动系统齿轮时变啮合刚度模态参与因子有效质量中图分类号:TPl37.332THl33.4ConstructionofBending—torsionalCoupledVibrationModelandComplexModalAnalysisoftheVehiclePowertrainLIUHuiXIANGChangleSUNTiantian(TheStateKeyLaboratoryofVehicleTransmission,BeijingInstituteofTechnology,Beijing100081)Abstract:Themulti—axlegearpowertrainofacertaintrackedvehicle.Firstlythemechanicalmodelofmulti-DOFbending-torsioncoupledvibrationisestablishedaccordingtoacertainsimplificationprinciple,andbasedonthecharacteristicofthemechanicalmodel,thefiniteelementmodelofthesystemisestablishedinANSYSbycombiningthebending—torsioncoupledvibrationmathematicmodelandthefiniteelementtheorywhichtakesintoaccountthemeshstiffnessanddampingofthegear,andthesupportingstiffnessandoilfilmdampingofthebearing.Complexmodalcalculationofthedampedfiniteelementmodeliscarriedout.andthecharacteristicofbending—torsioncoupledvibrationisanalyzed.Thevibrationform,modalparticipationfactorandeffectivemassofthecoupledmodalarediscussed.Theinfluenceoftime-varyingmeshstiffnessandmeshdampingonthevibrationmodalisresearched.Atlastthebending-torsioncoupledvibrationbenchtestiscarriedoutforthegearsystem.ThecomparisonbetweentestdataandsimulationcalculationresultverifiestheCoITectrlessofthefiniteelementmodel,whichlaysthefoundationforfurthgrdynamicanalysis.Keywords:PowertrainTime-varyingmeshstiffnessofthegearModalparticipationfactorEffectivemass耦合振动,影响了车辆的可靠性和乘员的舒适性,0前言因此,研究齿轮传动系统的弯扭耦合振动具有重要的意义。
国内外许多学者对齿轮副的弯扭耦合振动目前,多轴齿轮传动是车辆传动系统的主要形进行了比较深入的研究,例如,文献[1]通过计入齿式之一。
传统的车辆动力传动系统的振动研究只考轮啮合线瞬时位置的变化对齿轮间动态啮合力的影虑扭转振动,不考虑轴承的支承弹性和阻尼,以及响,建立了弯扭耦合模型;文献[2]在考虑齿轮时变齿轮的啮合作用。
而实际上齿轮传动系统存在弯扭啮合刚度,齿侧间隙等非线性因素的情况下,用数值方法研究了齿轮耦合转子一滑动轴承系统的动力・国家自然科学基金资助项目(509050t8)。
20091216收到初稿。
20100601收到修改稿学模型;文献【3】中通过集中参数法建立了齿轮副的万方数据机械工程学报第46卷第24期弯扭耦合振动模型:文献【4冲介绍了应用传递矩阵法建立一对齿轮副弯扭耦合振动模型。
而针对多轴系齿轮传动系统,当考虑时变齿轮啮合刚度、轴系的弯曲刚度以及轴承的支撑刚度和油膜阻尼时,虽然其力学模型和数学模型的建立相对比较容易,但是系统刚度矩阵或者阻尼矩阵的参数获取比较困难,因此在求解时,通常会对系统参数进行简化,忽略其时变性或者不考虑轴承的弹性。
随着计算机技术和有限元理论的成熟,使用有限元软件可以更方便的建模和求解。
因此本文利用ANSYS建立车辆动力传动系统的有限元模型,使用这种方法可以在输入系统模型的基本参数(例如轴的尺寸、各个集中惯量的质量和转动惯量等)以及齿轮啮合刚度和啮合阻尼、轴承支撑刚度和油膜阻尼数值后,由有限元软件直接建立系统的刚度矩阵、阻尼矩阵,省去了求解轴系弯曲刚度和扭转刚度等繁琐的参数计算过程,并且可以利用其成熟的动力学算法和程序语言,方便地得到系统的振动特性,避免了编写计算程序。
l多自由度弯扭耦合振动系统建模某车辆动力传动系统主要包含曲柄连杆机构和齿轮传动机构两部分,传动轴之间通过齿轮啮合传递动力。
在以下假设的基础上,通过集中参数法建立动力传动系统弯扭耦合振动力学模型,如图1所示。
^7图l动力传动系统的力学模型(1)将轴的转动惯量按照动能等效原理分配到齿轮或转子上;换挡离合器、液力变矩器、活塞曲柄机构等简化为集中质量。
(2)曲柄连杆机构的轴都比较短,或者支承比较密集,仅考虑扭转方向的自由度;而传动轴比较长,并且支承距离也较远,因此考虑传动轴的扭转弹性变形和弯曲弹性变形以及轴承支承的弹性变形;传动轴上的集中质量考虑弯曲方向和扭转方向的自由度。
在力学模型的基础上,建立动力传动系统的有限元模型。
轴段采用三维6自由度的梁单元模拟;曲柄轴采用弹簧单元。
齿轮、离合器主被动部分、曲柄连杆机构等集中惯量,使用质量点单元处理。
系统中的齿轮啮合关系通过刚度矩阵和阻尼矩阵模拟。
轴承通过选取轴上相应位置的一个节点和垂直于此节点在轴外建立另一个节点,以及这两个节点之间的刚度矩阵单元和阻尼矩阵单元来模拟。
如图2所示,图2中点代表齿轮、弹性联轴器主被动部分、离合器主被动部分等集中质量点;粗线代表轴;细线代表齿轮啮合刚度矩阵和阻尼矩阵以及轴承的刚度矩阵和阻尼矩阵。
万方数据2010年12月刘辉等:车辆动力传动系统弯扭耦合振动模型的建立及复模态分析69口。
——啮合线与z轴夹角琊,磁——主、被动齿轮的基圆半径k,‰,k,k——轴承的支撑刚度和轴的弯曲刚度的综合,其数值由有限元软件中,在建立了模拟轴段的梁图2某履带车辆动力传动系统有限元模型单元和模拟轴承支撑的刚度矩阵单元后,程序自动计算得到下面介绍如何通过刚度矩阵和阻尼矩阵建立齿轮啮合关系。
采用矩阵单元Matrix27,其特点是不用定义几何形状,通过定义刚度、阻尼或者质量系数来表征弹性运动。
这种单元只有两个节点,和k,c馏——齿轮副时变啮合刚度和啮合阻尼,,每个节点有6位移自由度。
与弹簧一阻尼单元和质量单元有相似之处。
为12x12阶对称矩阵或者不对称矩阵。
各行对应的自由度是节点川l勺以,q、配、匙、尺,、恐,接下来是节点-厂的以、以、以、最、风、尼。
如果其中1自由度被约束,则相应的行和列为零。
图1中,在传动轴1和2上的齿轮副的弯扭耦合振动数学方程如式(1)~(7)所示,其弯曲振动方向为x和z,扭转振动方向为母mp爻p+c盯j:p+k茚xp=一Fpe——齿形误差时变啮合刚度可以根据文献[3】中的Weber能量法求得,时变啮合阻尼和齿形误差通过文献[3]qh的经验公式(8)、(9)获得cm=2孝厝(9).e(t)=eo+P,sin(2兀t/Tz+力式中印,白——轮齿误差的常值和幅值,eo=0疋——齿轮的啮合周期疋=60/nzsina曙Q)(21(3)mPzv+cpzip+kp2Zp2一FpCOS曜‘%=一‘B一乙mgis+c群jcg+k擎xg=Fpsina鸭”●mg≥g+c弘ig+k弘zg=FpCOSa鸭en以——齿轮转速z——齿轮齿数伊——相位角,取妒=o{——轮齿啮合的阻尼比,按照KASUBA和WANG的分析计算,一般为0.03"一0.17,这里取为0.1毛%=‘咚一乙(6)0=‰[(巧%一毽%)+(%一xg)sinam+(Zp—z,)cosa.pg—P]+‰【-(q纬+毽唿)+(‘一/:g)sinan+(气一气)cosam一舌]式中(7)将式(1)~(7)中与位移相关的项(包括%,%和而,匆,喙,%)移到方程左边,并写成矩阵形式,便可得到式(10)、(11)。
式00)是与刚度有关的弹性力,式(11)是与阻尼有关的粘性力。
由式(11)、(12)可以得到刚度矩阵和阻尼矩阵的系数为式(13)、(14)。
%,%——主被动齿轮的扭转角劫,匆,%,zg——主被动齿轮在工、z方向的位移sin2%00sinamcosam00哗s协%0一sin2%0一sinamCOSam0-2sin%00000000000000COS2%0%COSamo—s洫%c08%00O000一COS2%0一毽COSam00000一RgRv0《0一Rpsinam最=k000一Rpcosam00sinamcosa/,g0sin2‰0O0毽s洫%0OO0COS。
a鸭0ORgcoSa/髫000《00和办和钐铷易靠妇%靠%艮(10)万方数据sin2吆0sina璐eosa馏0哗sin口2s0一sin2%0一sina飕COSapg0000000000o-R,sina,,g00OOOOOOOO0OO0COS2%0彤cosa嚣O-sina腭CO¥Ofpg0000一COS2%0o一毽c.,OSO‘pg00《0一彤sina馏0-R,cosa,,g0000o吨彤000Rs0CO¥O‘pg疋=c馏sin2%0sina船eosa馏0忍sina昭00COS2。