车辆系统动力学结构模型
- 格式:ppt
- 大小:5.39 MB
- 文档页数:44
整车动力学模型的建立与优化方法研究整车动力学模型是指通过对汽车整体结构、动力系统、传动系统等各个部分进行建模和仿真,来分析和优化整车性能的一种方法。
建立和优化整车动力学模型对于提高汽车性能、降低燃料消耗和减少排放具有重要意义。
本文将从动力学模型的建立和优化方法两个方面进行探讨。
首先,动力学模型的建立是整车设计和优化的基础。
建立整车动力学模型需要考虑到车辆在不同工况下的运动学和动力学特性。
其中,运动学特性包括车辆的加速度、速度和位移等;动力学特性则包括车辆的加速度、力和扭矩等。
为了准确地描述车辆在运动中的行为,需要综合考虑车辆的转向、制动、加速等各种因素。
在建立整车动力学模型时,可以采用多种方法。
一种常用的方法是基于物理原理的建模方法。
这种方法利用牛顿力学和运动学等基本原理,通过建立汽车动力学方程和约束方程来描述车辆的运动状态。
另一种方法是基于试验数据的建模方法。
这种方法通过对车辆在实际行驶中的数据进行采集和分析,然后利用数学模型对数据进行处理,得到模型参数。
这两种方法可以结合使用,通过不断调整模型参数,逐步优化整车动力学模型的准确性和可靠性。
其次,优化整车动力学模型是提高汽车性能的关键。
在优化整车动力学模型时,需要考虑各种约束条件和目标函数。
约束条件包括车辆的动力系统、传动系统和悬挂系统等各个部分的性能指标。
目标函数则包括提高车辆的操控性、减少能量消耗和降低排放等方面的指标。
通过调整不同参数,可以改变整车的性能和特性,进而实现优化目标。
为了有效地优化整车动力学模型,可以采用多种方法。
一种是基于多目标优化的方法。
这种方法通过设置多个相互独立的优化目标,将整车动力学模型转化为一个多维优化问题。
然后利用多目标优化算法对模型进行求解,得到一组最优解。
另一种方法是基于遗传算法的方法。
这种方法通过模拟生物进化过程,不断优化整车动力学模型的参数,以获得最佳的性能表现。
此外,还可以利用仿真软件进行优化,利用虚拟试验来评估和优化整车性能。
理想差速轮车的动力学模型差速轮车是一种常见的机动车辆,它具有独特的动力学特性。
理想差速轮车的动力学模型可以帮助我们更好地理解其运动规律和性能表现。
本文将介绍理想差速轮车的动力学模型,从而帮助读者对差速轮车有更深入的了解。
差速轮车是一种由两个驱动轮和一个差速器组成的车辆。
差速器是连接两个驱动轮的装置,它可以使两个驱动轮以不同的速度旋转。
这种设计使得差速轮车能够更好地适应转弯等复杂路况,提高车辆的操控性和稳定性。
在理想差速轮车的动力学模型中,我们假设车辆在平坦的道路上行驶,并忽略空气阻力等外部因素。
我们将车辆简化为一个质点,忽略车身结构和悬挂系统对车辆运动的影响。
这样可以简化计算,更好地研究差速轮车的基本运动规律。
首先,我们需要确定差速轮车的坐标系。
一般来说,我们可以选择一个固定于地面的坐标系作为参考系,以便描述车辆的运动。
在这个坐标系中,我们可以定义车辆的位置、速度和加速度等物理量。
接下来,我们需要确定差速轮车的运动方程。
根据牛顿第二定律,我们知道物体的加速度与作用在物体上的合力成正比。
对于差速轮车来说,合力包括驱动力、制动力和摩擦力等。
其中,驱动力是由发动机提供的推力,制动力是由刹车系统提供的阻力,摩擦力是由轮胎与地面之间的摩擦产生的。
在差速轮车的动力学模型中,我们还需要考虑转弯时的侧向力。
当车辆转弯时,驱动轮和非驱动轮之间会产生不同的旋转速度,从而产生侧向力。
这种侧向力会影响车辆的行驶方向和稳定性。
此外,在差速轮车的动力学模型中,我们还需要考虑车辆的转弯半径和转弯角度等因素。
转弯半径决定了车辆在转弯过程中所需的侧向力和角加速度。
转弯角度决定了车辆转弯时所需的时间和空间。
综上所述,理想差速轮车的动力学模型是一个复杂而全面的研究课题。
通过建立合理的数学模型和进行精确的计算,我们可以更好地理解差速轮车的运动规律和性能表现。
这对于改进差速轮车的设计和优化其性能具有重要意义。
希望本文对读者对差速轮车有所帮助,并激发更多人对差速轮车动力学模型研究的兴趣。
1 绪论随着社会的发展和文明的进步,汽车作为一种交通工具,已成为人们出行的主要选择,汽车乘坐的安全性、舒适性已成为世人关注的焦点。
汽车作为高速客运载体,其运行品质的好坏直接影响到人的生命安全,因此,与乘坐安全性、舒适性密切相关的轿车动力学性能的研究就显得非常重要。
悬架系统汽车的一个重要组成部分,它连接车身与车轮,主要由弹簧、减震器和导向机构三部分组成。
它能缓冲和吸收来自车轮的振动,传递车轮与地面的驱动力与制动力,还能在汽车转向时承受来自车身的侧倾力,在汽车启动和制动时抑制车身的俯仰和点头。
悬架系统是提高车辆平顺性和操作稳定性、减少动载荷引起零部件损坏的关键。
一个好的悬架系统不仅要能改善汽车的舒适性,同时也要保证汽车行驶的安全性,而提高汽车的舒适性必须限制汽车车身的加速度,这就需要悬架有足够的变形吸收来自路面的作用力。
然而为了保证汽车的安全性,悬架的变形必须限定在一个很小的范围内,为了改善悬架性能必须协调舒适性和操作稳定性之间的矛盾,而这个矛盾只有采用这折衷的控制策略才能合理的解决。
因此,研究汽车振动、设计新型汽车悬架系统、将振动控制在最低水平是提高现代汽车性能的重要措施[1][2]。
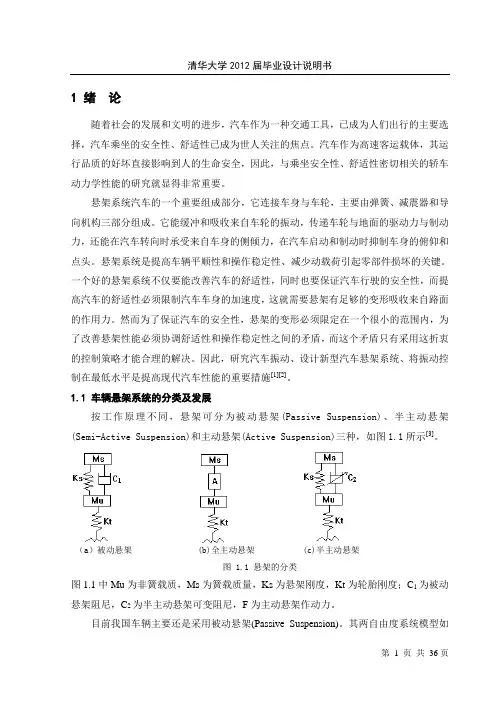
1.1 车辆悬架系统的分类及发展按工作原理不同,悬架可分为被动悬架(Passive Suspension)、半主动悬架(Semi-Active Suspension)和主动悬架(Active Suspension)三种,如图1.1所示[3]。
(a)被动悬架 (b)全主动悬架 (c)半主动悬架图 1.1 悬架的分类图1.1中Mu为非簧载质,Ms为簧载质量,Ks为悬架刚度,Kt为轮胎刚度;C1为被动悬架阻尼,C2为半主动悬架可变阻尼,F为主动悬架作动力。
目前我国车辆主要还是采用被动悬架(Passive Suspension)。
其两自由度系统模型如图1.1(a)所示。
传统的被动悬架一般由参数固定的弹簧和减振器组成,其弹簧的弹性特性和减振器的阻尼特性不能随着车辆运行工况的变化而进行调节,而且各元件在工作时不消耗外界能源,故称为被动悬架。
基于神经网络逆系统的车辆动力学模型解耦法
常亚妮;郭红戈;张春美
【期刊名称】《太原科技大学学报》
【年(卷),期】2024(45)2
【摘要】为了消除车辆各系统纵横向之间的耦合影响,对车辆动力学模型进行了神经网络逆系统解耦控制。
选用的研究对象为四轮驱动、前轮转向的无人驾驶车辆。
首先,将包含侧向运动和横摆运动两个自由度的车辆动力学模型通过Interactor算
法进行可逆性分析;其次,搭建卷积神经网络(Convolutional Neural
Networks,CNN)和长短期记忆神经网络(Long Short-Term Memory,LSTM)逆系
统结构构建逆系统,并验证该方法的可行性;将该解耦方法应用于无人驾驶车辆的轨
迹跟踪控制设计中,通过CarSim和Matlab/Simulink联合仿真试验证明,设计的CNN+LSTM神经网络逆系统解耦控制在多种工况下都具较好的跟踪特性及稳定性。
【总页数】7页(P125-131)
【作者】常亚妮;郭红戈;张春美
【作者单位】太原科技大学电子信息工程学院
【正文语种】中文
【中图分类】U461
【相关文献】
1.基于神经网络逆系统的感应电机变频系统解耦控制
2.基于BP神经网络的电磁轴承逆系统解耦控制
3.基于神经网络逆系统方法的汽车底盘解耦控制
4.基于神经网
络逆系统的稳压器水位与压力解耦控制探析5.两电机调速系统的神经网络逆无模型自适应鲁棒解耦控制
因版权原因,仅展示原文概要,查看原文内容请购买。

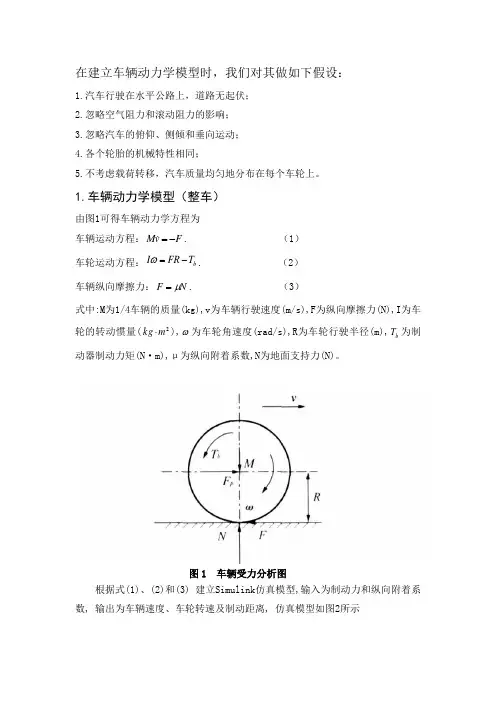
在建立车辆动力学模型时,我们对其做如下假设:1.汽车行驶在水平公路上,道路无起伏;2.忽略空气阻力和滚动阻力的影响;3.忽略汽车的俯仰、侧倾和垂向运动;4.各个轮胎的机械特性相同;5.不考虑载荷转移,汽车质量均匀地分布在每个车轮上。
1.车辆动力学模型(整车)由图1可得车辆动力学方程为车辆运动方程:F vM -= . (1) 车轮运动方程:b T FR I -=ω. (2) 车辆纵向摩擦力:N F μ=. (3)式中:M 为1/4车辆的质量(kg),v 为车辆行驶速度(m/s),F 为纵向摩擦力(N),I 为车轮的转动惯量(2m kg ⋅),ω为车轮角速度(rad/s),R 为车轮行驶半径(m),b T 为制动器制动力矩(N ·m),μ为纵向附着系数,N 为地面支持力(N)。
图1 车辆受力分析图根据式(1)、(2)和(3) 建立Simulink 仿真模型,输入为制动力和纵向附着系数, 输出为车辆速度、车轮转速及制动距离, 仿真模型如图2所示图2 车辆动力学仿真模型2.轮胎模型轮胎模型是指制动过程中轮胎附着力和其它各种参数之间的函数关系式,通常用轮胎附着系数与各种参数的函数关系式来表示。
而影响附着系数的因素很多,如前所述.除滑移率外,道路的材料、路面的状况与轮胎的结构、胎面花纹、材料以及汽车运动速度等都是影响因素。
但在实际应用中,很难得出上述多种变量对附着系数影响的关系式,而较为实际与合理的办法则是只考虑对附着系数影响较大的因素,建立附着系数的计算表达式。
经典的轮胎模型有魔术公式轮胎模型、双线性模型、Dugoff轮胎模型和Burckhardt轮胎模型等,这里采取应用比较广泛的双线性模型。
图3 纵向附着系数μ 与滑移率S 的关系曲线根据上图,推导出双线性轮胎模型的数学表达式为:................................................................................................................11h opt opt hg opt h g optopt opt S S S S S S S S S S μμμμμμμ⎧=⋅≤⎪⎪⎨-⋅-⎪=-⋅>⎪--⎩(4)基于本课题的研究目的,我们采用双线性模型分别模拟三种典型路面的 曲线,并应用于汽车防抱制动系统的控制仿真模型中。
车辆动力学模型滚阻系数车辆动力学模型是研究车辆运动的数学模型,其中一个重要的参数是滚阻系数。
滚阻系数是指车辆在行驶过程中轮胎与地面之间摩擦力的大小,它对车辆的动力性能和能耗有重要影响。
本文将从滚阻系数的定义、影响因素和测量方法三个方面来进行详细阐述。
一、滚阻系数的定义滚阻系数是指车辆在行驶过程中轮胎与地面之间摩擦力与轮胎垂直压力之比。
它是车辆运动中的一个重要参数,直接影响着车辆的行驶阻力、能耗和动力性能。
滚阻系数越大,车辆在行驶过程中所受到的阻力越大,需要更多的能量来克服阻力。
二、滚阻系数的影响因素滚阻系数与轮胎和地面的摩擦特性、轮胎的结构和材料、轮胎的气压、车辆的负荷以及行驶速度等因素密切相关。
1. 轮胎和地面的摩擦特性:不同的地面类型和轮胎材质具有不同的摩擦系数,这直接影响着滚阻系数的大小。
例如,干燥的柏油路面上的滚阻系数通常较低,而湿滑的泥泞路面上的滚阻系数较高。
2. 轮胎的结构和材料:不同类型和品牌的轮胎在结构和材料上存在差异,这也会导致滚阻系数的不同。
一般来说,胎面较宽、胎压较低的轮胎滚阻系数较高。
3. 轮胎的气压:轮胎的气压对滚阻系数有直接影响。
气压过高或过低都会导致滚阻系数的增加,因此保持适当的轮胎气压有助于减小滚阻系数。
4. 车辆的负荷:车辆所承载的负荷越大,轮胎与地面之间的接触面积越大,滚阻系数也会相应增加。
5. 行驶速度:车辆的行驶速度对滚阻系数有影响。
一般来说,当车辆的行驶速度较低时,滚阻系数较大;而当车辆的行驶速度较高时,滚阻系数较小。
三、滚阻系数的测量方法测量滚阻系数的方法有多种,常用的方法包括:行驶阻力法、滚动试验法和滚动台试验法。
1. 行驶阻力法:这是一种实际道路上进行的测量方法。
通过在实际道路上行驶一段距离,并测量车辆所需的驱动力和阻力,从而计算出滚阻系数。
2. 滚动试验法:这种方法通常在实验室条件下进行。
将车辆轮胎安装在滚动试验机上,通过模拟车辆行驶状态,测量所需的驱动力和阻力,从而计算出滚阻系数。
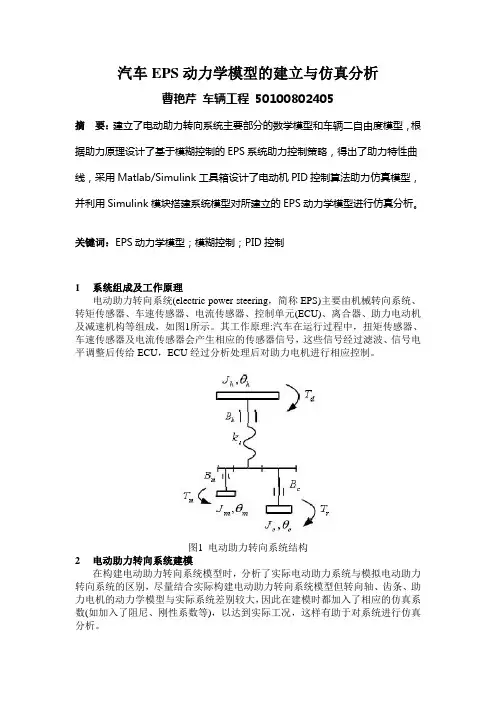
汽车EPS动力学模型的建立与仿真分析曹艳芹车辆工程50100802405摘要:建立了电动助力转向系统主要部分的数学模型和车辆二自由度模型,根据助力原理设计了基于模糊控制的EPS系统助力控制策略,得出了助力特性曲线,采用Matlab/Simulink工具箱设计了电动机PID控制算法助力仿真模型,并利用Simulink模块搭建系统模型对所建立的EPS动力学模型进行仿真分析。
关键词:EPS动力学模型;模糊控制;PID控制1 系统组成及工作原理电动助力转向系统(electric power steering,简称EPS)主要由机械转向系统、转矩传感器、车速传感器、电流传感器、控制单元(ECU)、离合器、助力电动机及减速机构等组成,如图1所示。
其工作原理:汽车在运行过程中,扭矩传感器、车速传感器及电流传感器会产生相应的传感器信号,这些信号经过滤波、信号电平调整后传给ECU,ECU经过分析处理后对助力电机进行相应控制。
图1 电动助力转向系统结构2 电动助力转向系统建模在构建电动助力转向系统模型时,分析了实际电动助力系统与模拟电动助力转向系统的区别,尽量结合实际构建电动助力转向系统模型但转向轴、齿条、助力电机的动力学模型与实际系统差别较大,因此在建模时都加入了相应的仿真系数(如加入了阻尼、刚性系数等),以达到实际工况,这样有助于对系统进行仿真分析。
在图1中,设转向盘和上端转向轴的转动惯量、电动机的转动惯量、前轮及转向机构向转向轴等效后的转动惯量分别为h J 、m J 、c J ,单位为2kg m ⋅;转向盘上施加的转矩、等效到转向轴的转向阻力矩、电动机的电磁转矩和电动机作用到转向轴的助力分别为d T 、r T 、m T 、a T ,单位为Nm ;转向轴与支承之间的摩擦系数、转向机构与前轮等效到转向轴的摩擦系数、电动机转轴与支承之间的摩擦系数分别为h B 、c B 、m B ,单位为Nms/rad ;转向盘的转角、前轮等效到转向轴的转角、电动机的转角分别为h θ、c θ、m θ,单位为rad ;转矩传感器刚度为s K ,单位为Nm/rad ;从电动机经减速机构到转向轴的传动比为G 。
系统动力学9种模型引言系统动力学是一种研究动态系统行为的方法论,它通过构建系统模型来分析系统的各种因果关系和变化规律。
在系统动力学中,有9种基本模型被广泛应用于各种领域的问题分析和解决。
本文将对这9种模型进行全面、详细、完整且深入地探讨。
1. 积累模型积累模型是系统动力学中最基本的模型之一,它描述了一个变量或者一组变量的积累过程。
例如,当我们考虑人口增长的问题时,可以使用积累模型来描述人口数量随时间的变化。
积累模型通常使用微分方程表示。
1.1. 特点 - 变量之间存在流入和流出的关系; - 变量之间的积累是连续的; - 流入量和流出量可以是恒定的或者变化的。
1.2. 应用示例积累模型在生态学、经济学、工程管理等领域得到了广泛的应用。
例如,在生态学中,可以使用积累模型来研究物种数量的变化;在经济学中,可以使用积累模型来研究货币的流通和储蓄;在工程管理中,可以使用积累模型来研究项目进展和资源分配。
1.3. 示例方程dP/dt = b*P - d*P其中,P表示人口数量,t表示时间,b表示出生率,d表示死亡率。
2. 流动模型流动模型描述了一个变量或者一组变量之间的流动过程。
它通常用来研究物质、能量、信息等在系统中的传递和传播。
例如,在物流管理中,可以使用流动模型来研究物料的流动和分配。
2.1. 特点 - 变量之间存在流动的关系; - 流动可以是单向的或者双向的; -流动可以是连续的或者离散的。
2.2. 应用示例流动模型在供应链管理、信息传输、能量传递等领域具有广泛的应用。
例如,在供应链管理中,可以使用流动模型来优化物料的流动和库存的控制;在信息传输中,可以使用流动模型来研究信息的传播和处理;在能量传递中,可以使用流动模型来分析能量的转化和利用。
2.3. 示例方程dQ/dt = f - k*Q其中,Q表示物料的数量,t表示时间,f表示流入量,k表示流失率。
3. 动力平衡模型动力平衡模型描述了一个变量或者一组变量在达到平衡状态时的行为。
履带车辆的动力学运动学模型在探索履带车辆的动力学运动学模型时,我们将以人类的视角来描述这一过程。
履带车辆是一种特殊的交通工具,它具有独特的设计和机械结构,使其能够在各种地形条件下行驶。
让我们一起来了解它的动力学和运动学原理。
动力学是研究物体运动和力的学科,而运动学则研究物体的运动状态和轨迹。
履带车辆的动力学运动学模型涉及到其推进力、摩擦力、速度和加速度等因素。
履带车辆的推进力是使其前进的关键。
它通常由发动机提供,通过传动系统传递到履带上。
这种推进力可以通过控制油门来调节,从而改变车辆的速度。
当油门增加时,发动机输出的功率增加,推进力也会增加,车辆加速前进。
摩擦力是履带车辆运动中一个重要的因素。
摩擦力产生于履带与地面之间的接触面,它是使车辆能够在不滑动的情况下前进的关键。
摩擦力的大小取决于地面的粗糙程度和履带的材质。
当地面较滑时,摩擦力较小,车辆容易打滑;而当地面较粗糙时,摩擦力较大,车辆能够更好地抓地。
速度和加速度是描述履带车辆运动状态的重要指标。
速度是指车辆在单位时间内前进的距离,可以用公里/小时或米/秒来表示。
加速度则是指车辆在单位时间内速度的变化量,可以用米/秒²来表示。
通过控制推进力的大小和方向,可以改变车辆的速度和加速度。
在履带车辆的动力学运动学模型中,还要考虑到其他因素的影响,如车辆质量、车辆的阻力和地形的坡度等。
车辆质量越大,需要更大的推进力才能使其前进;而阻力越大,车辆的速度和加速度就会受到更大的影响;地形的坡度也会对车辆的前进产生影响,车辆在上坡时需要更大的推进力,而在下坡时则可能需要制动力来控制速度。
履带车辆的动力学运动学模型是一个复杂而又有趣的领域。
通过对推进力、摩擦力、速度和加速度等因素的研究,我们可以更好地理解和控制履带车辆的运动行为。
这不仅有助于改进车辆的设计和性能,还为我们探索更广阔的交通工具领域提供了有益的启示。
unicycle动力学模型
unicycle动力学模型是描述单轮车运动的数学模型。
该模型可以用来研究单轮车的稳定性、控制和动力学行为。
一般来说,unicycle动力学模型可以分为两个主要部分:车辆的运动学模型和车辆的动力学模型。
1. 运动学模型:
运动学模型描述了车辆的运动状态和姿态。
常见的运动学模型包括车辆的位置、速度、加速度以及车辆前进方向的角度等。
在unicycle模型中,通常假设车辆沿着一个平面运动,因此可以用二维坐标系来描述车辆的位置。
车辆的姿态可以用车辆前进方向的角度来表示。
2. 动力学模型:
动力学模型描述了车辆的运动是如何受到外部力和力矩的影响的。
在unicycle模型中,主要考虑的外部力是重力和地面对车轮的支持力。
此外,还需要考虑车辆的惯性和摩擦等因素。
动力学模型可以用欧拉-拉格朗日方程或牛顿定律来描述车辆的运动。
根据运动学和动力学模型,可以通过数学方法求解车辆的运动轨迹、稳定性和控制策略。
这对于设计和控制unicycle车辆具有重要的意义,例如在自动驾驶车辆或机器人中的应用。
CarSim是一种用于汽车动力学仿真的模型,其结构通常包括以下几个部分:
1. 车辆动力学模型:该模型描述了汽车的运动状态和运动规律,包括车辆的动力学参数、悬挂系统、轮胎和制动系统等。
2. 驾驶员模型:该模型描述了驾驶员的行为和决策过程,包括驾驶员的行为和决策、车辆控制策略等。
3. 道路和环境模型:该模型描述了道路和环境的特性,包括道路的几何形状、路面特性、交通流量和天气等。
4. 控制系统模型:该模型描述了汽车的控制系统,包括发动机、变速器、制动系统、悬挂系统等。
这些模型通常通过建立数学模型或使用传感器数据来实现,并通过计算机程序进行仿真和分析。
通过这些模型,可以模拟汽车在不同道路和环境条件下的运动状态,并进行优化和改进。
重载货车系统动力学建模设计摘要:随着我国对货物运输需求的增大,未来开行30t和40t轴重重载线路已成为必然趋势,然而大量不利因素制约着货物运输的发展,包括山区小半径曲线、磨耗轮与轨廓形、货物偏载和轨道结构破坏失效等,本文研究目的是利用建立的重载列车-轨道親合动力学模型,仿真分析平纵断面曲线、轮轨磨耗及牵引制动工况下列车的动态行为、轮轨接触几何、轮轨作用力及纵向冲动机理,为重载线路几何参数设计、轮轨磨耗控制及列车牵引制动提供理论指导和建议。
关键词:重载货车;建模;运输上世纪90年代曾发生多起列车直线段脱轨,以及货物装载不合理而造成的铁路脱轨事故若货物存在偏载,将会加剧轮轨相互作用,造成车辆轨道部件失效或破坏,加速轮轨磨耗,反过来更不利于车辆的安全运行,严重情况下,甚至可能会导致车辆脱轨或倾覆。
鉴于重载铁路发展中所面临的困境,需要针对现有问题进行全面的理论和试验研究。
一.货车车辆动力学模型设计铁路货物运输中为适应运量大、检修方便和运输安全的需求,货车采用绍合金车体以减轻自重,可提高车辆最大载重,同时釆用三大件式转向架,结构简弟,容易拆装,维修方便快捷。
重载货车车辆动力学模型中将车辆视为多刚体系统,并将悬挂系统等效简化,其特性用数学模型来描述,货车车辆-轨道稱合动力学模型未能考虑车辆各子结构的柔性变形,通常将其简化为具有纵向、横移、沉浮、侧滚、点头及摇头六个自由度的多刚体,其中不考虑侧架侧滚运动和摇枕的除摇头以外的运动。
1.轴箱悬挂设计不同于传统摩擦导框式转向架定位方式,转K6在轴箱与侧架间加装弹性橡胶热,消除了轴箱间隙,实现轮对的弹性定位,将导框式定位转向架中侧架及拉杆等簧下质量变为簧上质量,减小轮对间动态作用力及降低磨耗,有效地改善车辆动力学性能。
橡胶塾的弹性作用,采用非线性弹簧阻尼单元来描述,并选用适当的三向刚度值,导框式定位转向架中轮对与轴箱横向和纵向存在一定间隙,间隙范围内一系作用力均为摩擦力,鉴于理想干摩擦模型简明易懂,在工程应用中得到广泛采用。
列车单质点动力学模型
列车单质点动力学模型是一种简化的列车运动描述方法,它将整列火车视为一个单一的质点,从而简化了复杂的列车动力学问题。
这一模型虽然在某些精细分析方面可能存在局限,但在许多工程实践中却极具实用性,能够为列车控制和运行优化提供基础支持。
单质点动力学模型基于牛顿第二定律,即F=ma,其中F是作用在列车上的合力,m是列车的质量,a是列车的加速度。
在这个模型中,列车被视为一个集中质量的点,所有外部作用力(如牵引力、制动力、空气阻力、坡道阻力等)都被集中在这个点上。
这样,列车的运动就可以通过一个简单的动力学方程来描述。
在列车单质点动力学模型中,通常会考虑列车的运动阻力,包括基本阻力(与列车速度成正比)和附加阻力(如坡道阻力和曲线阻力)。
这些阻力与列车速度、列车质量以及运行环境等因素密切相关。
通过测量和计算这些阻力,可以更准确地预测列车的运动状态。
此外,列车单质点动力学模型还可以用于分析列车的制动性能和牵引性能。
通过调整模型中的参数,可以模拟不同制动和牵引条件下的列车运动情况,从而为列车制动和牵引系统的设计和优化提供依据。
然而,值得注意的是,由于列车单质点动力学模型忽略了列车的内部结构和动力学特性,因此在一些需要更高精度分析的场合(如列车稳定性分析、车辆间动力学耦合等),这一模型可能不再适用。
在这些情况下,需要采用更为复杂的列车多质点动力学模型或有限元模型来进行研究。
综上所述,列车单质点动力学模型是一种简单而实用的列车运动描述方法,它能够在许多工程实践中提供有效的支持和指导。
虽然这一模型在某些方面可能存在局限,但其简洁性和实用性使其仍具有广泛的应用价值。