非线性振动第1章 多尺度复习课程
- 格式:ppt
- 大小:673.00 KB
- 文档页数:39
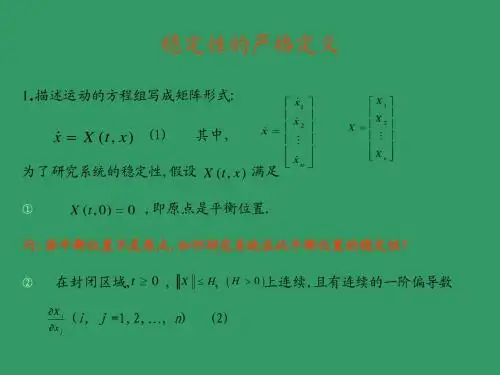
(完整word版)⼯程⾮线性振动学习总结,推荐⽂档东北⼤学《⾮线性振动》学习总结第⼀章⾮线性振动的定性分析⽅法1.1 稳定性理论的基本概念特定的运动成为系统的未受⼲扰的运动,简称为稳态运动,⽽受扰运动则是偏离稳态运动的系统的运动。
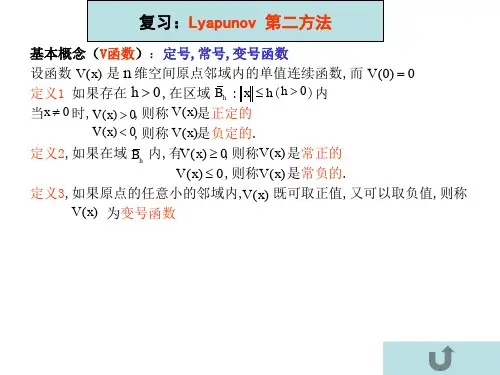
李雅普诺夫关于稳定性的定义有:稳定的、渐进稳定、不稳定李雅普诺夫直接⽅法的理论基础由三个定理组成:(1)若能够早可谓征订函数V(x),使得沿扰动⽅程解曲线计算的全导数V为半负定或等于零,则系统的未扰运动稳定。
(2)若能构造可微正定函数V(x),使得沿扰动⽅程解曲线计算的全导数V为负定,则系统的未扰运动渐进稳定。
(3)若能构造可微正定、半正定函数V(x),使得沿扰动⽅程解曲线计算的全导数V为正定,则系统的未扰运动不稳定。
定理:若保守系统的势能在平衡状态处有孤⽴极⼩值,则平衡状态稳定。
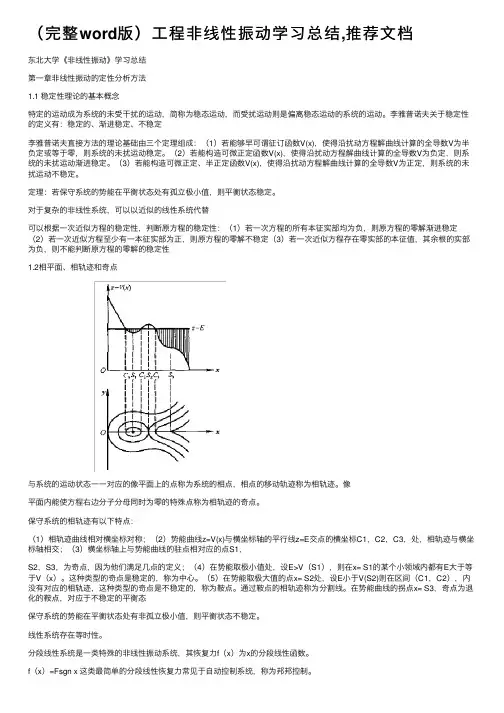
对于复杂的⾮线性系统,可以以近似的线性系统代替可以根据⼀次近似⽅程的稳定性,判断原⽅程的稳定性:(1)若⼀次⽅程的所有本征实部均为负,则原⽅程的零解渐进稳定(2)若⼀次近似⽅程⾄少有⼀本征实部为正,则原⽅程的零解不稳定(3)若⼀次近似⽅程存在零实部的本征值,其余根的实部为负,则不能判断原⽅程的零解的稳定性1.2相平⾯、相轨迹和奇点与系统的运动状态⼀⼀对应的像平⾯上的点称为系统的相点,相点的移动轨迹称为相轨迹。
像平⾯内能使⽅程右边分⼦分母同时为零的特殊点称为相轨迹的奇点。
保守系统的相轨迹有以下特点:(1)相轨迹曲线相对横坐标对称;(2)势能曲线z=V(x)与横坐标轴的平⾏线z=E交点的横坐标C1,C2,C3,处,相轨迹与横坐标轴相交;(3)横坐标轴上与势能曲线的驻点相对应的点S1,S2,S3,为奇点,因为他们满⾜⼏点的定义;(4)在势能取极⼩值处,设E>V(S1),则在x= S1的某个⼩领域内都有E⼤于等于V(x)。
这种类型的奇点是稳定的,称为中⼼。
(5)在势能取极⼤值的点x= S2处,设E⼩于V(S2)则在区间(C1,C2),内没有对应的相轨迹,这种类型的奇点是不稳定的,称为鞍点。
第一章非线性振动初步一、教学目标1、理解无阻尼单摆的相图;2、能分析出阻尼单摆的相图;3、了解杜芬方程、范德玻耳方程;4、掌握线性单摆的受迫振动;5、了解杜芬方程的受迫振动。
6、了解庞加莱映射。
二、教学重点1、阻尼单摆的相图2、杜芬方程三、教学难点杜芬方程、范德玻耳方程四、教学方法讲授并适当运用课件辅助教学五、教学建议在学习本章之前应复习《力学》中有关谐振子、单摆、共振的内容。
六、教学过程一、无阻尼单摆的自由振荡1、小角度无阻尼单摆 椭圆点单摆,一个由摆线l 联着的重量为mg 的摆锤所组成的力学系统,是力学教科书中通常都要进行讨论的一个简单的动力学模型。
其实我们将会看到,它具有非常复杂的动力学行为,是一个复杂系统。
我们研究一个理想的单摆,即忽略摆线l 质量,认为整个系统的质量都集中在摆锤上,是一个具有集中参数的数学摆,如图1-1所示。
因为如果把摆线与摆锤的质量一起计算,单摆就是一个具有分布参数的摆,与此相应的数学模型是偏微分方程,处理起来很复杂。
理想单摆的数学表达是常微分方程,研究起来就要容易得多了。
图1-1 数学摆首先忽略一切阻尼,例如忽略摆锤在运动中受到的空气阻力、摆线与悬挂点之间的摩擦力等等。
由牛顿第二运动定律,摆锤质量为m 的单摆的运动方程为:ml d dt mg 22θθ=-sin (1-1-1)式中θ为摆角,g 为重力加速度。
将等式右边项移到到左边,并以ml 相除后有:0sin 22=+θθl g dt d设 l g /0=ω,它是以单位时间的弧度为单位的角频率0ω,则式(1-1-1)可写为:0sin 2022=+θωθdt d (1-1-2)由于正弦函数是非线性的,因此这是一个二阶非线性微分方程。
用级数展开正弦函数:+-+-=!7!5!3sin 753x x x x x (1-1-3)如果x 很小,则可以忽略三次以上的高次项,即x x ≈sin 。
这就是说当单摆的摆角很小时,式(1-1-2)变为线性微分方程:02022=+θωθdt d (1-1-4)方程(1-1-4)的解可以通过如下的代换解获得:t e λθ=式中为常数。