H无穷控制
- 格式:doc
- 大小:235.50 KB
- 文档页数:10



Scilab 常用指令一览表Scilab常用指令一览表2011-04-11 22:451通用指令help在线帮助apropos文档中关键词搜寻ans缺省变量名以及最新表达式的运算结果clear从内存中清除变量和函数exit关闭scilab quit退出scilab save把内存变量存入磁盘exec运行脚本文件mode文件运行中的显示格式getversion显示scilab版本ieee浮点运算溢出显示模式选择who列出工作内存中的变量名edit文件编辑器type变量类型what列出scilab基本命令format设置数据输出格式chdir改变当前工作目录getenv给出环境值mkdir创建目录pwd显示当前工作目录evstr执行表达式2运算符和特殊算符+加-减*矩阵乘.*数组乘^矩阵乘方.^数组乘方\反斜杠或左除/斜杠或右除./或.\数组除==等号~=不等号小于大于=小于等于=大于等于&,and逻辑与|,or逻辑或-,not逻辑非:冒号()圆括号方括号{}花括号.小数点,逗号;分号//注释号=赋值符号'引号'复数转置号.'转置号ans最新表达式的运算结果%eps浮点误差容限%i虚数单位%inf正无穷大%pi圆周率3编程语言结构abort中止计算或循环break终止最内循环case同select一起使用continue将控制转交给外层的for或while循环else同if一起使用elseif同if一起使用end结束for,while,if语句for按规定次数重复执行语句otherwise可同switch一起使用pause暂停模式return返回select多个条件分支then同if一起使用while不确定次数重复执行语句eval特定值计算feval函数特定值计算或多变量计算function函数文件头global定义全局变量isglobal检测变量是否为全局变量error显示错误信息lasterror显示最近的错误信息sprintf按格式把数字转换为串warning显示警告信息4基本数学函数acos反余弦acosh反双曲余弦acot反余切acoth反双曲余切acsc反余割acsch反双曲余割asin反正弦asinh反双曲正弦atan反正切atanh反双曲正切cos余弦cosh双曲余弦cot余切coth双曲余切sin正弦sinh双曲正弦tan正切tanh双曲正切exp指数log自然对数log10常用对数log2以2为底的对数sqrt平方根abs绝对值conj复数共轭imag复数虚部real复数实部ceil向正无穷大方向取整floor向负无穷大方向取整fix向零方向取整round四舍五入取整sign符号函数gsort降次排序erf误差函数erfc补误差函数gamma gamma函数interp插值函数interpln线性插值函数intsplin样条插值函数smooth样条平滑函数spline样条函数quarewave方波函数double将整数转换为双精度浮点数5基本矩阵函数和操作eye单位矩阵zeros全零矩阵ones全1矩阵rand均匀分布随机阵genmar kov生成随机Markov矩阵linspace线性等分向量logspace对数等分向量logm矩阵对数运算cumprod矩阵元素累计乘cumsum矩阵元素累计和toeplitz Toeplitz矩阵disp显示矩阵和文字内容length确定向量的长度size确定矩阵的维数diag创建对角矩阵或抽取对角向量find找出非零元素1的下标matrix矩阵变维rot90矩阵逆时针旋转90度sub2ind全下标转换为单下标tril抽取下三角阵triu抽取上三角阵conj共轭矩阵companion伴随矩阵det行列式的值norm矩阵或向量范数nnz矩阵中非零元素的个数null清空向量或矩阵中的某个元素orth正交基rank矩阵秩trace矩阵迹cond矩阵条件数inv矩阵的逆rcond逆矩阵条件数lu LU分解或高斯消元法pinv伪逆givens Givens变换linsolve求解线性方程lyap Lyapunov方程hess Hessenberg矩阵poly特征多项式schur Schur分解expm矩阵指数expm1矩阵指数的Pade逼近expm2用泰勒级数求矩阵指数expm3通过特征值和特征向量求矩阵指数funm计算一般矩阵函数logm矩阵对数sqrtm矩阵平方根6特性值与奇异值spec矩阵特征值gspec矩阵束特征值bdiag块矩阵,广义特征向量eigenmar-正则化Markov特征kov向量pbig特征空间投影svd奇异值分解sva奇异值分解近似7矩阵元素运算cumprod元素累计积cumsum元素累计和hist统计频数直方图min最小值mean平均值median中值prod元素积sort由大到小排序std标准差sum元素和trapz梯形数值积分corr求相关系数或方差8稀疏矩阵运算sparse稀疏矩阵adj2sp邻接矩阵转换为稀疏矩阵full稀疏矩阵转换为全矩阵mtlb_sparse将scilab稀疏矩阵转换为matlab稀疏矩阵格式sp2adj将稀疏矩阵转换为邻接矩阵speye稀疏矩阵方式单位矩阵sprand稀疏矩阵方式随机矩阵spzeros稀疏矩阵方式全零阵lufact稀疏矩阵LU分解lusolve稀疏矩阵方程求解spchol稀疏矩阵Cholesky分解9输入输出函数diary生成屏幕文本记录disp变量显示file文件管理input用户键盘输入load读已经存在的变量mclose关闭文件mget读二进制文件mgetl按行读ascii码文件mgetstr读字符串中单个字mopen打开文件mput写二进制文件mfscanf读ascii码文件print将变量记录为文件read读矩阵变量save将变量存为二进制文件startup启动文件write按格式存文件xgetfile对话方式获取文件路径x_dialog建立xwindows参数输入对话框Tk_Getvar得到Tk文件变量Tk_EvalFile执行Tk文件10函数与函数库操作deff在线定义函数edit函数编辑器function打开函数定义functions scilab函数或对象genlib在给定目录下建立所有文件的函数库get_function_path读函数库的文件存储目录路径getd读函数库中的全部文件getf在文件中定义一个函数lib函数库定义macro scilab函数或对象macrovar输入变量个数newfun输出变量个数11字符串操作code2str将scilab数码转换为字符串convstr字母大小转换emptystr清空字符串grep搜寻相同字符串part字符提取str2code将字符串转换为scilab数码string字符串转换strings scilab对象,字符串strcat连接字符stringex字符串的字符位置搜寻strsubst字符串中的字符替换12日期与时间date日期getdate读日期与时间timer cpu时间计时13二维图形函数plot2d直角坐标下线性刻度曲线champ二维向量场champ1由颜色箭头表示的二维向量场contour2d等高线图errbar曲线上增加误差范围框线条grayplot应用颜色表示的表面xgrid画坐标网格线histplot统计频数直方图Matplot散点图阵列14三维图形函数plot3d三维表面plot3dl用颜色或灰度表示的三维表面param3d三维中单曲线param3dl三维中多曲线contour三维表面上的等高线图hist3d三维表示的统计频数直方图geom3d三维向二维上的投影15线条类图形xpoly单线条或单多边形xpolys多线条或多多边形xrpoly正多边形xsegs非连接线段xfpoly单个多边形内填充xfpolys多个多边形内填充xrect矩形xfrect单个矩形内填充xfrects多个矩形内填充xarc单个弧线段或弧圆xarcs多个弧线段或弧圆xfarc单个弧线段或弧圆填充xfarcs多个弧线段或弧圆填充xarrows多箭头16图形注释,变换xstring图形中字符xstringb框内字符xtitle图形标题xaxis轴名标注plotframe图形加框并画坐标网格线isoview等尺寸比例显示(原图形窗口不改变) square等尺寸比例显示(原图形窗口改变) xsetech设置小窗口xchange转换实数为图形像素坐标值subplot设置多个子窗口17图形颜色及图形文字colormap应用颜色图getcolor交互式选择颜色图addcolor增加新色于颜色图graycolormap线性灰度图hotcolormap热色颜色图xset图形显示方式设定xget读当前图形显示方式设定getsymbol交互式选择符号和尺寸18图形文件及图形文字xsave将图形存储为文件xload从磁盘中读出图形文件xbasimp将图形按ps文件打印或存储为文件xs2fig将图形生成xfig格式文件xclear清空图形窗口driver选择图形驱动器xinit图形驱动器初始化xend关闭图形xbasr图形刷新replot更改显示范围后的图形刷新xdel关闭图形xname改变当前图形窗口名称19控制分析图形bode伯德图坐标gainplot幅值图坐标(伯德图中的幅值图) nyquist乃奎斯特图m_circle m-圆图chart尼库拉斯图black black-图evans根轨迹图sgr id s平面图plzr零极点图zgrid z平面图20图形应用中的其他指令graphics图形库指令表xclick等待鼠标在图形上的单击输入locate由单击读入图形中的多点位置坐标xgetmouse由单击读入图形中当前点位置坐标21系统与控制abcd状态空间矩阵cont_mat可控矩阵csim线性系统时域响应dsimul状态空间的离散时域响应feedback反馈操作符flts时域响应(离散,采样系统)freq2tf基于传递函数的频域响应freq频域响应g_margin幅值裕量imrep2ss基于状态空间的脉冲响应lin线性化操作lqe kalman滤波器lqg lqg补偿器lqr lq补偿器ltitr基于状态空间的离散时域响应obscont基于观测器的控制器obsv_mat观测矩阵p_margin相位裕量phasemag相位与幅值计算ppol极点配置repfreq频域响应ricc riccati方程rtitr基于传递函数的离散时域响应sm2ss系统矩阵到状态空间的变换ss2ss反馈连接的状态空间到状态空间的变换ss2tf状态空间到传递函数的变换stabil稳定性计算tf2ss传递函数到状态空间的变换time_id siso系统最小方差辨识22鲁棒控制augment被控对象增广操作bstap Hankel矩阵近似ccontrg H无穷大控制器dhnorm离散H无穷大范数h2norm H2范数h_cl闭环矩阵h_inf h无穷大控制器h_norm h无穷大范数hankelsv hankel矩阵奇异值leqr h无穷大控制器的lq增益linf无穷范数riccati riccati矩阵sensi敏感函数23动态系统arma arma模型arma2p基于ar模型获得多项式矩阵armac armax辨识arsimul armax系统仿真noisegen噪声信号发生器odedi常微分方程仿真检测prbs_a伪随机二进制序列发生器reglin线性拟合24系统与控制实例artest arnold动态系统bifish鱼群人口发展的离散时域模型boucle具有观测器的动态系统相位图chaintest生物链模型gpech渔业模型fusee登录火箭问题lotest lorennz吸引子mine采矿问题obscontl可控可观系统portr3d三维相位图portrait二维相位图recur双线性回归方程systems动态系统tangent动态系统的线性化tadinit动态系统的交互初始化25非线性工具(优化与仿真) bvode边界值问题的常微分方程dasrt隐式微分方程过零解dassl代数微分方程datafit基于测量数据的参数辨识derivative导数计算fsolve非线性函数过零解impl线性微分方程int2d二维定积分int3d三维定积分intg不定积分leastsq非线性最小二乘法linpro线性规划lmisolver线性不等矩阵ode常微分方程ode_discrete离散常微分方程ode_root常微分方程根解odedc连续离散常微分方程optim非线性优化quapro线性二次型规划semidef半正定规划26多项式计算coeff多项式系数coffg多项式矩阵逆degree多项式阶数denom分母项derivat有理矩阵求导determ矩阵行列式值factors因式分解hermit hermit型horner多项式计算invr有理矩阵逆lcm最小公倍数ldiv多项式矩阵长除numer分子项pdiv多项式矩阵除pol2des将多项式矩阵变换为表达式pol2str将多项式变换为字符串polfact最小因式residu余量roots多项式的根simp多项式的简化systmat系统矩阵27信号处理%asn椭圆积分%k jacobi完全椭圆积分%sn jacobi椭圆函数analpf模拟量低通滤波器buttmag butterworth滤波器响应cepstrum倒谱计算cheb1mag chebyshev一型响应cheb2mag chebyshev二型响应chepol chebyshev多项式convol卷积corr相关,协方差cspect谱估计dft离散傅立叶变换fft快速傅立叶变换filter滤波器建模fsfirlin fir滤波器设计hank协方差矩阵到hankel矩阵变换hilb hilbert变换iir iir数字滤波器intdec信号采样率更改kalm kalman滤波器更新mese最大熵谱估计mfft多维快速傅立叶变换mrfit频率响应拟合phc maikov过程srkf kalman滤波器平方根sskf稳态kalman滤波器system观测更新wfir线性相位fir滤波器weiener weiener滤波器window对称窗函数yulewalk最小二乘滤波器zpbutt buthererworth模拟滤波器zpchl chebyshev模拟滤波器28音频信号analyze音频信号频域图auread读*.au音频文件auwrite写*.au音频文件lin2mu将线性信号转换为miu率码信号loadwave取*.wav音频文件mapsound音频信号图示mu2lin将mu码率信号转换为线性信号playsnd音频信号播放savewave存*.wav音频文件wavread读*.wav音频文件wavwrite写*.wav音频文件29语言与数据转换工具ascii字符串的ascii码excel2sci读ascii格式的excel文件fun2string将scilab函数生成ascii码mfile2sci将matlab的m格式文件转换为sci格式文件mtlb_load取matlab第四版本文件中变量matlb_save按matlab第四版本文件格式存变量pol2tex将多项式转换为tex格式sci2for将scilab函数转换为fortran格式文件texprint按tex格式输出scilab对象translatepaths将子目录下的所有matlab文件转换为sci文件格式。

无穷级数用解析的形式来逼近函数,一般就是利用比较简单的函数形式,逼近比较复杂的函数,最为简单的逼近途径就是通过加法,即通过加法运算来决定逼近的程度,或者说控制逼近的过程,这就是无穷级数的思想出发点。
目录概述历史判断数项级数的性质幂级数泰勒展开式Fourier级数收敛与发散性质概述历史判断数项级数的性质幂级数泰勒展开式Fourier级数收敛与发散性质判别法展开无穷级数是研究有次序的可数或者无穷个数函数的和的收敛性及和的数值的方法,理论以数项级数为基础,数项级数有发散性和收敛性的区别。
只有无穷级数收敛时有一个和;发散的无穷级数没有和。
算术的加法可以对有限个数求和,但无法对无限个数求和,有些数列可以用无穷级数方法求和。
包括数项级数、函数项级数(又包括幂级数、Fourier级数;复变函数中的泰勒级数、Laurent(洛朗)级数)。
英国曼彻斯特大学和埃克塞特大学的研究小组指出,喀拉拉学校也曾发现可用于计算圆周率的无穷级数,并利用它将圆周率的值精确到小数点后第9位和第10位,后来又精确到第17位。
研究人员说,一个极有说服力的间接证据是,15世纪,印度人曾经将他们的发现告知造访印度的精通数学的耶稣会传教士。
‚无穷级数‛可能最终摆到了牛顿本人的书桌上。
约瑟夫是在通读字迹模糊的印度文字材料时得出这些发现的,他的畅销著作《孔雀之冠:非欧洲的数学之根》(The Crest of the Peacock: the Non-European Roots of Mathematics)的第3版将刊登此次发现,该书由普林斯顿大学出版社负责出版。
他说:‚现代数学的起源通常被视为欧洲人取得的一项成就,但中世纪(14至16世纪)印度的这些发现却被人们忽视或者遗忘了。
17世纪末期,牛顿的工作取得了辉煌的成就。
他所做的贡献是不容人们抹杀的,尤其在提到微积分的运算法则时更是如此。
但喀拉拉学校的学者——特别是马德哈瓦(Madhava)和尼拉坎特哈(Nilakantha)的名字也同样不能忘记,他们取得的成就足以和牛顿平起平坐,因为正是他们发现了微积分的另一个重要组成部分——无穷级数。

高阶无穷小运算技巧概述及解释说明1. 引言1.1 概述本文是关于高阶无穷小运算技巧的概述及解释说明。
高阶无穷小是微积分中一个重要的概念,它在许多科学和工程领域中具有广泛的应用。
通过掌握高阶无穷小的性质、特点以及运算规则,我们可以更加深入地理解微积分中的极限和导数,并且能够应用到实际问题中。
1.2 文章结构本文共分为五个部分:引言、高阶无穷小的概念、高阶无穷小运算技巧、实际应用场景和结论。
在引言部分,我们将介绍本文所涉及内容的背景和目标。
接下来,在高阶无穷小的概念部分,我们将详细解释高阶无穷小的定义以及与极限的关系,并探讨其性质和特点。
然后,在高阶无穷小运算技巧部分,我们将讲解如何进行渐近展开法,并介绍高阶无穷小加减运算规则以及乘除运算规则。
之后,在实际应用场景部分,我们会给出物理学、工程学和经济学中使用高阶无穷小的实际应用举例。
最后,在结论部分,我们将对全文进行总结和归纳。
1.3 目的本文的目的主要有两个方面。
首先,通过阅读本文,读者将能够了解高阶无穷小这一微积分中重要的概念,并理解它与极限的关系以及其性质和特点。
其次,读者还将学到高阶无穷小的运算技巧,包括渐近展开法、加减运算规则和乘除运算规则等,从而能够灵活应用到实际问题中。
通过掌握这些知识和技巧,读者可以更好地理解微积分相关内容,并能够在工作和学习中运用到高阶无穷小相关的领域中。
2. 高阶无穷小的概念:2.1 高阶无穷小的定义:在微积分中,高阶无穷小是指当自变量趋于某一点时,相对于其他无穷小来说增长更快的无穷小。
更准确地说,设函数f(x)是自变量x的函数,在某一点a处取值为0。
如果存在另一个函数g(x),在点a处也取值为0,并且当x趋近于a时,f(x)/g(x)趋于零,则称f(x)为比g(x)高阶的无穷小。
2.2 高阶无穷小与极限的关系:高阶无穷小和极限密切相关。
在求解极限过程中,我们经常需要研究无穷小量之间的比较大小情况。
如果一个函数f(x)在某一点a处取值为0,并且它比另一个函数g(x)增长得更快,那么我们可以认为f(x)是比g(x)高阶的无穷小。
驱动电机负载模型H∞控制器设计一、引言电动机是指能将直流电能转换成机械能的旋转电机。
电动机按使用电源不同分为直流电动机、交流电动机;按照定子和转子的相对速度可分为同步电机、是异步电机。
作为最常用的驱动执行器,它在车辆中应用广泛,如门窗的起降,自动雨刮器,电动汽车驱动,冷却风扇,发动机起动机等等。
目前电机的控制,尤其是直流电机的控制方法,主要以PID控制和LQR控制为主。
随着汽车性能要求的不断提高,人们越来越关注于系统的稳定性,对于电机的控制也提出了新的要求。
尤其是作为电动汽车的驱动电机,在车辆行驶过程中,特别是高速行驶中,一个微小的摄动可能会对车辆运动产生很大的影响。
在驱动电机工作过程中,由于环境温度变化等工作状况的变动;外部路面干扰;车辆负载突增;老化机械参数变化;建模误差等缘故,会造成模型不精确,也就是模型的不确定性是广泛存在,不可避免的。
因此,需要一种固定的控制器,可以保证模型与实际系统出现偏差时,仍能保持所需的控制品质。
而鲁棒性就是系统的强壮性。
这便引出了使用鲁棒控制来解决电机负载扰动这一问题的讨论。
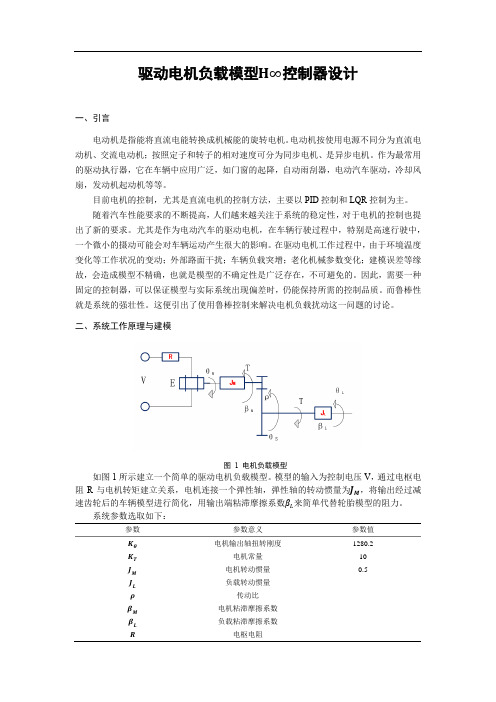
二、系统工作原理与建模图 1 电机负载模型如图1所示建立一个简单的驱动电机负载模型。
模型的输入为控制电压V,通过电枢电阻R与电机转矩建立关系,电机连接一个弹性轴,弹性轴的转动惯量为J M,将输出经过减速齿轮后的车辆模型进行简化,用输出端粘滞摩擦系数βL来简单代替轮胎模型的阻力。
系统参数选取如下:参数参数意义参数值Kθ电机输出轴扭转刚度1280.2K T电机常量10J电机转动惯量0.5MJ负载转动惯量Lρ传动比β电机粘滞摩擦系数Mβ负载粘滞摩擦系数LR电枢电阻建立系统的微分方程。
首先,电机扭矩与电流直接相关:M =K T ×I其中K T 是电机固有参数。
接下来建立驱动电机负载模型的扭矩关系式:J L ×ωL +K θ(θL −θM ρ)+βL ×ωL =0 (1) J M ×ωM =K T ×I −βM ×ωM +K θρ(θL −θM ρ) (2) 设置电机负载系统输入为电压值V ,输出为负载转速ωL ,建立驱动电机负载模型的状态空间方程。
3、五阶系统降阶为二阶后,利用H 无穷设计控制器。
将所得到的控制器去控制五阶系统,并画出系统的伯德图,阶跃响应曲线以及脉冲响应曲线。
通过比较选择较好的控制器。
已知车载雷达天线伺服系统的速度环5阶辨识模型的传递函数如下:
4545232+177.4895 30.12388334.29312.401501534341.5233192763396.418603+3579747.1483927130053+200719529.923316556143470.692.70100
86s s s s s s s s s -++++-一:
利用平衡实现得到的实现为:
a =
x1 x2 x3 x4 x5
x1 -3.797 -87.26 -7.154 -1.089 15.46
x2 87.26 -22.64 -37.32 -1.64 61.06
x3 -7.154 37.32 -20.01 -110.7 49.5
x4 1.089 -1.64 110.7 -0.16 18.63
x5 15.46 -61.06 49.5 -18.63 -130.9
b =
u1
x1 3.065
x2 -6.73
x3 3.676
x4 -0.3234
x5 -7.254
c =
x1 x2 x3 x4 x5
y1 3.065 6.73 3.676 0.3234 -7.254
d =
u1
y1 0
降阶得到的实现为:
a =
x1 x2
x1 -3.797 -87.26
x2 87.26 -22.6
b =
u1
x1 3.065
x2 -6.73
c =
x1 x2
y1 3.065 6.73
d =
u1
y1 0
①取r=100时, 状态反馈矩阵为
G = -3.214920344598795 1.203978656643358
加入反馈状态二阶系统的伯德图与未加二阶反馈系统的伯德图如下:
tfG表示反馈之后的二阶系统,tfc表示降阶的二阶系统
加入反馈状态二阶系统的阶跃响应曲线与未加反馈二阶系统的阶跃响应曲线如下:
tfun 表示加入反馈状态二阶系统的阶跃响应曲线,tfunc表示未加反馈二阶系统的阶跃响应曲线
②取R=1时,G = -3.214920381319644 1.203978662164900
tfG表示反馈之后的二阶系统,tfc表示降阶的二阶系统
加入反馈状态二阶系统的阶跃响应曲线与未加反馈二阶系统的阶跃响应曲线如下:
tfun 表示加入反馈状态二阶系统的阶跃响应曲线,tfunc表示未加反馈二阶系统的阶跃响应曲线
③取r=0.1时, 黎卡提方程找不到合适的解。
二:
通过多次试验可以找到使二阶系统性能较好的控制器,使得系统的相角裕度较大,阶跃响应超调量小,调节时间小。
这里选取r=1,控制器为G = -3.214920381319644 1.203978662164900通过在控制器后面加三个零构造一个五阶的控制器,进而应用到五阶模型上。
加入反馈状态五阶系统的伯德图与未加反馈五阶系统的伯德图如下:
其中tfGo表示加反馈的系统,tfG5表示未加反馈的系统。
可以发现添加反馈之后系统的相角裕度变大,稳定性增强。
加入反馈状态五阶系统的阶跃响应曲线图与未加反馈五阶系统的阶跃响应曲线图如下:
其中实线表示加入反馈状态五阶系统的阶跃响应曲线图,虚线表示原来五阶系统的阶跃响应曲线图。
可以发现加入状态反馈之后系统比原系统超调量小,调节时间要短。
加入反馈状态五阶系统的脉冲响应曲线图与未加反馈五阶系统的脉冲响应曲线图如下:
其中实线表示加入反馈状态五阶系统的脉冲响应曲线图,虚线表示原来五阶系统的脉冲响应曲线图。
可以发现加入状态反馈之后系统比原系统超调量小,调节时间要短。
三:
程序:
感谢下载!
欢迎您的下载,资料仅供参考。