DBM-01 挖、推、机械手、小车运动、四驱机械手模型
- 格式:doc
- 大小:408.00 KB
- 文档页数:2


机械臂dh法建模
机械臂的DH(Denavit-Hartenberg)法建模,是一种常用的机器人建模方法。
DH法把机器人的各关节看作旋转副和平移副,并将它们
连接起来组成一条运动链。
通过坐标系变换,可以将运动链上每个部
件的运动描述成沿着z轴的旋转和沿着x轴的平移。
每个部件的旋转
和平移被定义为4个参数:$d_i$、$\theta_i$、$r_i$和$\alpha_i$,这些参数可以用来描述机器人的几何特性。
其中,$d_i$表示关节$i$绕过前一个关节时所在的平移距离,
$\theta_i$表示关节$i$绕过前一个关节时的旋转角度,$r_i$表示关
节$i$与前一个关节之间的距离,$\alpha_i$表示关节$i$绕过前一个
关节时的旋转轴与该关节的轴之间的夹角。
通过DH法建立的机器人模型具有简单明了、参数可控和计算方
便等优点,在机器人运动控制和轨迹规划的研究中被广泛应用。

数控车床自动上下料机械手结构设计摘要:本课题针对于数控车床而设计了结构圆柱坐标型的自动上下料机械手,通过对机械手的传动机构,驱动系统、液压系统以及控制系统进行了理论分析和计算。
同时对机械手整体结构进行了详细的设计,主要包括机械手的机身机座,机械手手臂,机械手手爪等部分。
并分析了数控车床自动上下料机械手的操作流程,主要采用液压缸、步进电机等元件实现机械手的运动部分。
关键词:数控车床;机械手;传动机构:液压系统;驱动系统1、数控车床自动上下料机械手的设计方案1.1机械手结构的设计工业机器人的结构形式主要包括直角坐标型机器人、圆柱坐标型机器人、球坐标型机器人、关节型坐标机器人四种。
其对应的特点如表1。
表1工业机器人结构类型球坐标型机器人两个回抬运动以及一个直线运动结构简单.造价成本较低、精度较差搬运机器人关节型机器人三个回转运动动作灵活、结构疑凌焊接机器人、喷漆机器人、搬运1.2数控车床自动上下料机械手手部设计1.2.1机械手手部的设计要求本课题机械手手爪开闭范围需够大。
在机械手工作时,其中一个手爪张开夹紧角度的最大变化量为开闭范围。
手爪开闭范围的要求与工件的形状以及尺寸等因素都有关联。
通常情况下,机械手手爪的开闭范围越大越好。
1.2.2手爪结构的采用方案结合具体的工作要求,综上所述,本课题采用的是齿轮齿条式。
通过活塞往返带动齿条完成手爪张开或夹紧的动作。
1.3数控车床自动上下料机械手腕部设计机械手手腕主要功能是可以使被夹持工件的方位产生变化,此时机械手手腕需做回转运动,即只存在一个回转自由度。
结合本课题,本设计手腕不加自由度以便于机械手结构简单,操作简单。
1.4数控车床自动上下料机械手手臂设计考虑到操纵器在工作中的稳定性和安全性,将两个平行的导向杆添加到该对象的水平框架中,使其与运动活塞杆截面形成等腰三角形结构,以保证其结构更加稳定牢靠。
垂直手臂添加四个导杆其截面为正四边形,每个导杆都选用空心结构以保证机械手整体重量。

湖南工业大学本科毕业设计(2009届)本科毕业设计资料I湖南工业大学本科毕业设计摘要柔性制造系统是今后工业发展的一个趋势,送料机械手是生产流通中一个必不可少的环节,随着现代工业的发展,以往人工送料的方式已不能满足快速,准确的自动化生产需要,为了把人从繁重的送料工作中解脱出来,送料机械手的研制显得的尤为重要。
本论文详细介绍了柔性制造系统送料机械手的工作原理、结构特点及其设计。
对送料机械手的总体设计过程及计算方法作了具体的描述和分析。
该机械手的组成分为三个部分:机械系统、驱动系统、控制系统。
机械系统为机械手的手部、手臂旋转、底座的回转和进给机构。
文中通过对以上各机械部分的设计、计算和校核,实现了机械手4个自由度、运动轨迹、行程等各方面的要求。
设计选用了机械驱动方式,分别对机械系统和机械传动方式进行计算和设计。
对于控制系统,进行了简明的介绍,选择了PLC控制。
通过上述三部分的设计,设计出了一种小型柔性制造系统送料机械手,达到此次设计的目的。
关键词:送料,机械手,控制系统,柔性制造系统II湖南工业大学本科毕业设计ABSTRACTFMS is a trend of industry development in future. Feeding manipulator is an essential part of production circulation. As modern industrial developing, the old artificial stacking has failed to meet the needs of rapid and accurate automated production. The research of stacking manipulator is very important to release people from the heavy feeding work as soon as possible. This paper introduced the bit feeding manipulator's principle of work, the unique feature and the design in detail, at the same time, it has made the concrete description and the analysis on the feeding manipulator's system design process and the computational method. The mechanical industry machinery includes three parts: manipulator's hand, arm revolving, foundation's rotation and advanced gear. In the article through above various machine part's design, the computation and the examination, has realized the manipulator 4 degrees-of-freedom, the path, the traveling schedule and various aspects request. As to the drive part, I select the machinery drive type, separately carries on the computation and the design to the mechanical system and the mechanical drive way. Regarding to the control system, I have carried on the concise introduction, and have chosen the PLC control system. Through the above three parts of designs, I design a deliver the small- scale feeding manipulator of FMS to reach an aim in the design.Keywords:feeding , manipulator, control system,FMSIII湖南工业大学本科毕业设计(论文)目录第1章绪论 (1)1.1 机械手的简介 (1)1.2机械手的发展 (1)1.3机械手的分类 (2)1.3.1 按控制形式分类 (2)1.3.2 按用途分类 (3)1.3.3 按功能分类 (3)第2章送料机械手的方案设计及论证 (5)2.1 送料机械手的组成及各部分关系概述 (5)2.2设计要求及方案的拟定 (6)2.2.1 设计要求 (6)2.2.2 方案拟定 (6)第3章送料机械手的机械系统设计 (11)3.1工作参数的确定 (11)3.2底座旋转机构的设计 (11)3.2.1 电动机的选择 (12)3.2.2 齿轮的选择计算校核 (13)3.3底座进给机构的设计 (18)3.3.1 电动机的选择 (19)3.3.2 齿轮的设计计算 (19)3.3.3 齿条的设计计算 (23)3.3.4 轴的设计计算 (23)3.3.5 滚动轴承的校核 (25)3.4机械手手臂设计 (26)3.4.1 手臂的速度分析 (26)3.4.2 手臂的结构参数选择 (28)3.5末端执行机构的设计 (28)3.5.1 末端执行机构的结构设计 (28)IV湖南工业大学本科毕业设计(论文)3.5.2 末端执行机构的设计计算 (29)第4章机械手控制系统的系统设计 (31)4.1 PLC控制系统的介绍 (31)4.1.1 PLC控制系统的设计原则 (31)4.1.2 PLC控制系统的设计步骤 (31)4.2 机械手PLC控制系统的设计 (32)4.2.1 工况的分析和控制原理 (32)4.2.2 建立输入、输出地址分配表,并选择PLC (32)4.2.3 简化后的工艺要求与动作流程 (34)4.2.4 系统指令 (35)结论 (37)参考文献 (38)致谢 (39)V湖南工业大学本科毕业设计第1章绪论1.1 机械手的简介机械手是一种能模拟人的手臂的部分动作,按预定的程序、轨迹及其它要求,实现抓取、搬运工件或操纵工具的自动化装置。
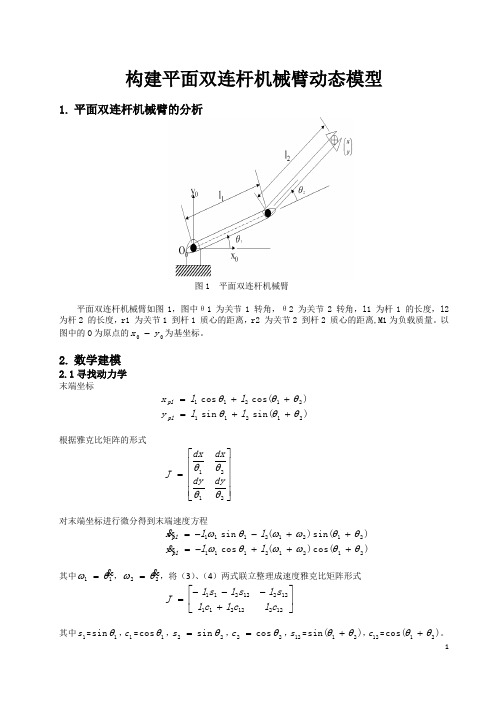
构建平面双连杆机械臂动态模型1. 平面双连杆机械臂的分析图1 平面双连杆机械臂平面双连杆机械臂如图1,图中θ1 为关节1 转角,θ2 为关节2 转角,l1 为杆1 的长度,l2为杆2 的长度,r1 为关节1 到杆1 质心的距离,r2 为关节2 到杆2 质心的距离,M1为负载质量。
以图中的O 为原点的00y x -为基坐标。
2. 数学建模2.1寻找动力学末端坐标)cos(cos 21211θθθ++=l l x pl )sin(sin 21211θθθ++=l l y pl根据雅克比矩阵的形式⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=2121θθθθdy dy dx dx J对末端坐标进行微分得到末端速度方程)sin()(sin 21212111θθωωθω++--=l l x pl & )cos()(cos 21212111θθωωθω+++-=l l y pl &其中11θω&=,22θω&=,将(3)、(4)两式联立整理成速度雅克比矩阵形式 ⎥⎦⎤⎢⎣⎡+---=1221221112212211c l c l c l s l s l s l J其中1s =1sin θ,1c =1cos θ,22sin θ=s ,22cos θ=c ,12s =)sin(21θθ+,12c =)cos(21θθ+。
在机器人基础坐标系中的速度与各关节速度间的关系以及手部与外界接触力与对应各关节间的关系可以利用雅克比矩阵来建立。
对机械臂末端速度方程(3) 、方程(4) 进行求导得到末端加速度方程如下[]1221222122211221121221122112)()(c l c l c l c l s l s l s l x pl ωωωωαα+++-=+++&& []1221222122211221121221122112)()(s l s l s l sl s l s l s l y pl ωωωωαα+++-=+++&&其中1α=1θ&&,2α=2θ&&,上述推导的方程构成了进行动力学仿真的基础,它们表明了有效负荷的加速度与 两节点处电动机的角速度和角加速度之间的关系。

第1页第一章 D-H 模型1.1 XX 机器人D-H 变换z4图1- 1 XX 机器人模型建立上述坐标系以后,坐标系i 关于坐标系1i -的位置和方向就完全由下列参数给定:a :(相邻两个Z 轴之间的垂直的距离,即连杆的长度。
)d :(相邻两个X 轴之间的垂直距离,即相连坐标系原点间的距离。
) α:(相邻两个Z 轴之间的夹角。
)θ:(相邻两个X 轴之间的夹角。
) 接下来进行相邻坐标系之间的坐标变换,运动顺序按照:1、将坐标系沿着轴1i Z -平移i d ,再绕着轴1i Z -旋转i θ,用齐次坐标变换描述:1'cos sin 00sin cos 00001001i i i i i i i A d θθθθ--⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎣⎦2、通过中间坐标系沿着轴'i X 平移i a ,并且绕着轴'i X 旋转i α,用齐次坐标变换描述为:1'1000cos sin 00sin cos 001i i i i i i i a A αααα-⎡⎤⎢⎥-⎢⎥=⎢⎥⎢⎥⎣⎦3、坐标变换通过右乘得到:1cos cos sin sin sin cos sin cos cos cos sin sin 0sin cos 01i i i i i i i i i i i i i i i i i i ia a A d θαθθαθθθαθαθαα--⎡⎤⎢⎥-⎢⎥=⎢⎥⎢⎥⎣⎦表1- 1 巨轮机器人的DH 参数表θ daα0-1 1θ1d 1a 1α 1-2 2θ 2d2a2α2-3 3θ3d 3a 3α 3-4 4θ 4d 4a 4α 4-5 5θ5d5a5α5-66θ 6d 6a 6α第3页1.2 旋转变换1、参考坐标系绕Z 轴旋转θ角的旋转矩阵为:cos sin 0sin cos 001Z R θθθθθ-⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦2、参考坐标系绕X 轴旋转α角的旋转矩阵为:1000cos sin 0sin cos x R ααααα⎡⎤⎢⎥=-⎢⎥⎢⎥⎣⎦ 得到关于两轴的旋转变换:R = [ cos(theta), -cos(alpha)*sin(theta), sin(alpha)*sin(theta)] [ sin(theta), cos(alpha)*cos(theta), -sin(alpha)*cos(theta)] [ 0, sin(alpha), cos(alpha)]1.3 正运动学变换0012345123456n T A A A A A A =1.4 逆运动学变换逆运动学是已知末端连杆的位置和方向,求机器人各个关节变量。
基于PLC的机械手控制设计一四轴联动简易机械手的结构及动作过程机械手结构如下图1所示,有气控机械手(1)、XY轴丝杠组(2)、转盘机构(3)、旋转基座(4)等组成。
其运动控制方式为:(1)由伺服电机驱动可旋转角度为360°的气控机械手(有光电传感器确定起始0点);(2)由步进电机驱动丝杠组件使机械手沿X、Y轴移动(有x、y轴限位开关);(3)可回旋360°的转盘机构能带动机械手及丝杠组自由旋转(其电气拖动部分由直流电动机、光电编码器、接近开关等组成);(4)旋转基座主要支撑以上3部分;(5)气控机械手的张合由气压控制(充气时机械手抓紧,放气时机械手松开)。
其工作过程为:当货物到达时,机械手系统开始动作;步进电机控制开始向下运动,同时另一路步进电机控制横轴开始向前运动;伺服电机驱动机械手旋转到达正好抓取货物的方位处,然后充气,机械手夹住货物。
步进电机驱动纵轴上升,另一个步进电机驱动横轴开始向前走;转盘直流电机转动使机械手整体运动,转到货物接收处;步进电机再次驱动纵轴下降,到达指定位置后,气阀放气,机械手松开货物;系统回位准备下一次动作。
二控制器件选型为达到精确控制的目的,根据市场情况,对各种关键器件选型如下:1. 步进电机及其驱动器机械手纵轴(Y轴)和横轴(X轴)选用的某公司的42BYG250C型两相混合式步进电机,步距角为0.9°/1.8°,电流1.5A。
M1是横轴电机,带动机械手机构伸、缩;M2是纵轴电机,带动机械手机构上升、下降。
所选用的步进电机驱动器是SH-20403型,该驱动器采用10~40V直流供电,H桥双极恒相电流驱动,最大3A的8种输出电流可选,最大64细分的7种细分模式可选,输入信号光电隔离,标准单脉冲接口,有脱机保持功能,半密闭式机壳可适应更恶劣的工况环境,提供节能的自动半电流方式。
驱动器内部的开关电源设计,保证了驱动器可适应较宽的电压范围,用户可根据各自情况在10~40VDC 之间选择。
《装备制造技术》2021年第2期四自由度工业机器人运动学分析与仿真张洪波1,孟丹1,潘宜斌2,冯宝林1,岳亮亮1,李磊1 (1•常州先进制造技术研究所,江苏常州213164:2.合肥固泰自动化有限公司,合肥230051 )摘要:以高粉尘环境下四自由度工业机器人为研究对象,利用D-H法建立机器人运动学方程,求出其位置的解析解,利用solidworks软件建立机器人的三维虚拟样机,并用recurdyn软件进行了运动学仿真验证关键词:工业机器人;运动学分析;运动学仿真中图分类号:TP242.2 文献标识码:A 文章编号:1672-545X(2021 >02-0017-030引言随着人力成本的逐步提高,搬运码垛等运输工 业的发展遭遇了前所未有的掣肘,高速重载工业机 器人技术的研究已成为我国工业领域亟待解决的问 题。
当前,四自由度码垛机器人多是由两个旋转关节 和两个移动关节组成的混联机器人,而四个旋转关 节机器人具有动作灵活、工作空间大、干涉小、结构 紧凑、易密封防尘等优点l h21。
本文采用双平行四边形 串联机构,增加了机器人本体整体刚度,同时可以维 持末端执行机构的水平姿态;对四自由度工业机器 人的四个旋转关节进行结构分析和运动学分析,在 不考虑力与力矩情况下,将机器人相对于固定参考 坐标系的运动作为时间的函数,研究了关节变量和 机器人末端位姿的关系i3'并用recurdyn进行运动 学仿真,验证了机器人数值计算,同时为机器人后续 的轨迹规划,动力学性能分析提供参考。
1机器人结构设计本文机器人的设计负载250 kg,主要由四个旋 转关节组成:(1)转座通过轴线竖直的旋转关节与底 座相连;(2)转座为机器人本体的支撑机构,其上安 装有平衡缸、大臂和副杆连杆;(3)小臂通过电机、减 速器直驱方式安装在大臂关节处,旋转关节处亦为 副杆连杆支撑点;(4)腕部与小臂通过旋转关节相连, 通过副杆连杆和大、小臂形成的平行四边形机构,使 腕部始终保持水平,同时满足腕部的易控性,腕部结 构为法兰盘形式,根据执行机构的不同,连接特定的执行器|51。
梅卡曼德产品手册Mech-Eye工业级3D相机Mech-Vision图形化机器视觉软件 Mech-DLK 深度学习平台软件Mech-Viz机器人智能编程环境梅卡曼德AI+3D视觉专家梅卡曼德致力于用AI+3D技术加速各行业智能化升级。
经多年潜心研发,梅卡曼德现已形成包括Mech-Eye工业级3D相机、Mech-Vision图形化机器视觉软件、Mech-DLK深度学习平台软件、Mech-Viz机器人智能编程环境在内的完整产品链。
可应用于无序物体抓取、高精度定位、装配、工业检测/测量、自动生成轨迹等典型场景。
智能程度高:Mech-Vision图形化机器视觉软件内置深度学习等先进算法,可处理纸箱、麻袋、工件、货品等多种物体,应对随意堆叠、无序放置、一定程度反光、暗色等复杂情况;稳定可靠:Mech-Eye工业级3D相机已通过上万小时的连续运行测试;IP65防护等级,防尘防水,可在严苛工业环境中稳定运行;且Mech-Eye已通过CE、FCC、 VCCI及RoHS认证;性价比高:整套方案的价格仅为国外典型同类产品的二分之一;开放性强:产品可适配各种主流品牌的机器人;支持对接各种系统及软件二次开发;部署简单高效:即插即用,节省大量部署时间;完全可视化、无代码的编程界面,极大降低使用难度和部署成本;应用案例丰富:在物流、电商、工程机械、汽车、钢铁、家电等领域已有上千个实际落地案例;在中国、美国、韩国、日本、德国、新加坡、意大利、西班牙等地已部署众多实际应用。
产品优势1梅卡曼德机器人推动智能机器人无所不在的存在 2AI+3D+工业机器人解决方案全力协助业务伙伴提升竞争力,把握智能机器人时代的先机获取物体高精度的 3D 信息完成复杂条件下的识别、定位、测量等视觉功能控制机器人应对复杂的应用Mech-Eye 工业级 3D 相机高性能工业级3D相机,可对众多类型的物体输出高质量的3D数据多种相机型号,满足不同场景中抗环境光、高精度、高速度、小体积等多样化需求Mech-Viz 机器人智能编程环境新一代机器人智能编程环境,可视化、无代码的编程界面,一键仿真内置轨迹规划、碰撞检测、抓取规划、混码等智能算法,已适配国内外众多主流品牌机器人支持和服务梅卡曼德团队超600人,可为机器人集成商提供交付支持、人员培训、参考方案设计、展会支持、重难点项目攻关等支持和服务Mech-Vision 图形化机器视觉软件新一代机器视觉软件,完全图形化界面,无需编写代码即可完成拆垛、无序工件上料、免注册货品抓取、涂胶/喷胶、精确定位、缺陷检测、尺寸测量等先进机器视觉应用内置3D视觉、深度学习等前沿算法模块,可满足复杂、多样的实际需求Mech-DLK帮助集成商可自主在本地进行深度学习模型训练3梅卡曼德机器人推动智能机器人无所不在的存在4单位:mmMech-Eye Nano Mech-Eye Pro S Enhanced Mech-Eye Pro M Enhanced Mech-Eye Laser L高性能与性价比的精巧诠释高性能工业级3D 相机,可对众多类型的物体输出高质量的3D 数据;多种相机型号,满足不同场景中抗环境光、高精度、高速度、小体积等多样化需求。
DBM-01 挖土机实训模型
集PLC技术、微机控制技术与一体,即有形像的模型,又有生动具体的运转机构,实验操作方便,是
各院校可编程控制器技术进行实物实验的理想模型。
DBM-01 推土机实训模型
集PLC技术、微机控制技术与一体,即有形像的模型,又有生动具体的运转机构,实验操作方便,是
各院校可编程控制器技术进行实物实验的理想模型。
DBM-01 机械手实训模型
一、组成及特点:
1、机械手实验装置由底座、旋转底座、气动部分、三维(X、Y、Z)运动机械及电气控制等四部分组成。
气动部分由电磁阀和气缸组成。三维运动机械部分是一个采用滚珠丝杠传动的齿轮传动相结合的模块化结
构,用于实现定位功能。
2、电气控制由三菱可编程控制器(PLC自备),步进电机驱动器、电源、传感器等组成。
3、通过传感器信号采集,PLC编程,实现对步进电机、直流电机、电磁阀进行较复杂的位置控制、时序
逻辑控制及开关控制等功能。
4、能完成PLC主机网络及MCGS工控组态棒图动态跟踪实验教学。
二、通过编程,可实现如下实验功能
开机复位、横轴前伸/缩回、竖轴上升/下降、底盘旋转、手旋转、手张开/夹紧,通过编程,使上述
功能按一定顺序排列即可完成将一定范围内的物品转运到指定位置。
DBM-01 小车运动控制系统实训教学模型
本装置采用丝杆传动系统,实现传动和定位要求。造型精美、体积紧凑、重量轻、坚固耐用,采用步
进电机控制高质量驱动方案,有力保证系统稳定、精密和快捷响应能力。行程范围2.4M,装有六只霍尔进
引位器反馈控制,由数码管显示小车运动次数,能满足大中专院校可编程控制器技术的教学、课程设计和
毕业设计。PLC自备。
DBM-01E 四驱机械手
通过PLC控制,实现机械手的真实工作状况。