结构力学第10章矩阵位移法c
- 格式:ppt
- 大小:530.00 KB
- 文档页数:28
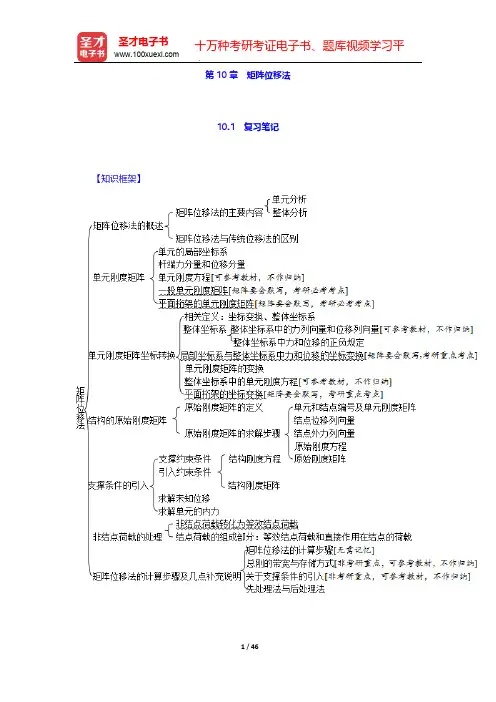
《结构力学》第十章矩阵位移法矩阵位移法是结构力学中的一种重要分析方法,通过将结构的受力分析转化为矩阵运算,可以有效地求解复杂结构的位移和应力分布。
本文将分为四个部分来介绍矩阵位移法的基本原理和应用。
第一部分将介绍矩阵位移法的基本原理。
矩阵位移法基于结构的受力平衡方程和变形条件,建立了适用于不同类型结构的一般形式的位移函数。
通过对这些位移函数进行适当组合,可以得到一个较为简化的位移矩阵方程。
这个方程可以通过矩阵运算求解,从而得到结构的位移和应力分布。
第二部分将介绍矩阵位移法的应用。
矩阵位移法可以用于求解各种类型的结构,包括梁、柱、框架等。
具体应用时,首先需要确定结构的边界条件和受力情况,然后根据结构的几何形状和材料性质,建立相应的位移函数。
之后,将位移函数按照一定的规则组合起来,建立一个位移矩阵方程。
通过解这个方程,可以得到结构的位移和应力分布。
第三部分将介绍矩阵位移法的优点。
相比于传统的力方法,矩阵位移法具有计算简单、准确性高、适用范围广等优点。
这是因为矩阵位移法可以通过矩阵运算将结构的受力分析转化为代数运算,减少了繁琐的计算过程,并且可以应用于各种不规则结构。
第四部分将介绍矩阵位移法的局限性。
矩阵位移法虽然具有很多优点,但也有一些限制。
首先,矩阵位移法对结构的刚度矩阵的求取较为复杂,需要通过精确和谐振数法等途径进行求解。
其次,矩阵位移法不能用于解决非线性和动力问题。
总结起来,矩阵位移法是一种重要的结构力学分析方法,通过将结构的受力分析转化为矩阵运算,可以有效地求解复杂结构的位移和应力分布。
它具有计算简单、准确性高、适用范围广等优点,但也有一些局限性。
因此,在实际应用中需要根据具体情况选择合适的方法。
同时,矩阵位移法的进一步研究和发展也是一个非常重要的方向。

第十章、矩阵位移法授课题目:第一节概述第二节单元坐标系中的单元刚度方程和单元刚度矩阵教学目的与要求:1.掌握整体刚度矩阵中的位移矩阵和结点力矩阵 2.掌握局部坐标系中刚度矩阵教学重点与难点:重点:结构的离散化,自由式杆件的单元刚度矩阵难点:无教学方法:讲授法教学手段:多媒体、板书教学措施:理论分析与实际工程相结合讲解讲授内容:第十章、矩阵位移法第一节概述结构矩阵分析方法是电子计算机进入结构力学领域而产生的一种方法。
它是以传统结构力学作为理论基础,以矩阵作为数学表述形式,以电子计算机作为计算手段,三位一体的方法。
1.结构的离散化由若干根杆件组成的结构称为杆件结构.使用矩阵位移法分析结构的第一步,是将结构“拆散”为一根根独立的杆件,这一步骤称为离散化。
为方便起见,常将杆件结构中的等截面直杆作为矩阵位移法的独立单元,这就必然导致结构中杆件的转折点、汇交点、支承点、截面突变点、自由端、材料改变点等成为连接各个单元的结点。
只要确定了杆件结构中的全部结点,结构中各结点间的所有单元也就随之确定了。
(a)(b)2。
结点位移和结点力由于矩阵位移法不再为了简化计算而忽略杆件的轴向变形,因此,对于平面刚架中的每个刚结点而言,有三个相互独立的位移分量:水平方向的线位移分量u,竖直方向的线位移分量v,和结点的转角位移分量q。
对于这三个分量,本章约定线位移与整体坐标系方向一致为正,转角以顺时针转向为正,反之为负.结点荷载是指作用于结点上的荷载.本章约定结点集中力和支反力均以与整体坐标系方向相同时为正,反之为负。
结点集中力偶和支座反力偶以顺时针转向为正,反之为负.()()N 1Q 23N 4Q 56e e i i e i i ee j j j j Ff F f M f F f F f M f ⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎡⎤===⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦F F F()()123456e e i i e i i ee j j j j u v u v δδθδδδθδ⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎡⎤===⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦δδδ3。
程序:#include ”stdafx。
h”#include ”stdio。
h"#include ”math。
h"#include ”stdlib。
h”void main(){int loc[3][2]={0},ifix[6]={0};float area[3]={0.0},fint[3]={0.0},cx[4]={0。
0},cy[4]={0.0},f[12]={0。
0},fr[12]={0.0},fe[3][6]={0.0};int nn,ne,nd,nfix;float ea;int i,j,k;FILE *shuru,*shuchu;shuru=fopen("shuru.dat",”r");shuchu=fopen("shuchu。
dat”,”w”);fscanf(shuru,"%d%d%d%d%f”,&nn,&ne,&nd,&nfix,&ea);fprintf(shuchu,"nn ne nd nfix e\n%d %d %d %d %f\n”,nn,ne,nd,nfix,ea);i=0;while(i〈=ne-1){fscanf(shuru,"%d%d%f%f",&loc[i][0],&loc[i][1],&area[i],&fint[i]);i++;}fprintf(shuchu,"element node1 node2 area fint\n”);i=0;while(i<=ne—1){fprintf(shuchu,”%d %d %d %f %f\n”,i+1,loc[i][0],loc[i][1],area[i],fint[i]); i++;}j=0;while(j〈=nn-1){fscanf(shuru,"%f%f”,&cx[j],&cy[j]);j++;}fprintf(shuchu,"node x—coord y-coord\n”);j=0;while(j<=nn-1){fprintf(shuchu,”%d %f %f\n",j+1,cx[j],cy[j]);j++;}k=0;while(k〈=nfix-1){fscanf(shuru,"%d",&ifix[k]);k++;}fprintf(shuchu,”ifix=”);k=0;while(k<=nfix-1){fprintf(shuchu,"%d ”,ifix[k]);k++;}fprintf(shuchu,”\n");void cst(int (*loc)[2],int *ifix,float *area,float *fint,float *cx,float *cy,float *f,float *fr,float (*fe)[6],FILE *shuru,FILE *shuchu,float ea);cst(loc,ifix,area,fint,cx,cy,f,fr,fe,shuru,shuchu,ea);fprintf(shuchu,”node x-disp y-disp thita\n”);i=0;while(i〈=3){fprintf(shuchu,”%d %f %f %f\n",i+1,f[3*i],f[3*i+1],f[3*i+2]);i++;}fprintf(shuchu,”reaction nodal forces from the equations\n");fprintf(shuchu,”node x-load y-load moment\n");i=0;while(i<=3){fprintf(shuchu,”%d %f %f %f\n",i+1,fr[3*i],fr[3*i+1],fr[3*i+2]);i++;}fprintf(shuchu,”element axi—f shear—q moment—m\n”);i=0;while(i〈=ne—1){fprintf(shuchu,"%d %f %f %f %f %f %f\n”,i+1,fe[i][0],fe[i][1],fe[i][2],fe[i][3],fe[i][4],fe[i][5]);i++;}fclose(shuru);fclose(shuchu);}void cst(int (*loc)[2],int *ifix,float *area,float *fint,float *cx,float *cy,float *f,float *fr,float (*fe)[6],FILE *shuru,FILE *shuchu,float ea){int np,nvd;float p1[3][6]={0.0},p2[3][6]={0.0},gk[12][12]={0。