结构力学 矩阵位移法 结构动力学 习题
- 格式:doc
- 大小:661.50 KB
- 文档页数:11
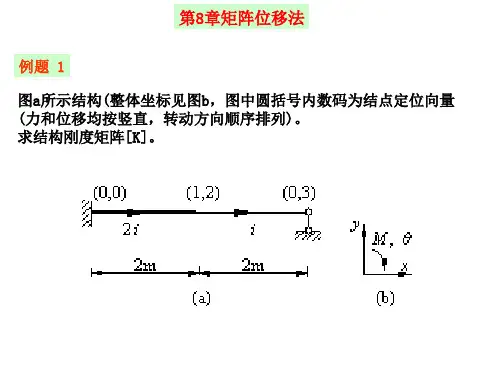
第9章矩阵位移法习题解答习题9.1是非判断题(1)矩阵位移法既可计算超静定结构,又可以计算静定结构。
()(2)矩阵位移法基本未知量的数目与位移法基本未知量的数目总是相等的。
()(3)单元刚度矩阵都具有对称性和奇异性。
()(4)在矩阵位移法中,整体分析的实质是建立各结点的平衡方程。
()(5)结构刚度矩阵与单元的编号方式有关。
()(6)原荷载与对应的等效结点荷载使结构产生相同的内力和变形。
()【解】(1)正确。
(2)错误。
位移法中某些不独立的杆端位移不计入基本未知量。
(3)错误。
不计结点线位移的连续梁单元的单刚不具奇异性。
(4)正确。
(5)错误。
结点位移分量统一编码会影响结构刚度矩阵,但单元或结点编码则不会。
(6)错误。
二者只产生相同的结点位移。
习题9.2填空题(1)矩阵位移法分析包含三个基本环节,其一是结构的,其二是分析,其三是分析。
(2)已知某单元的定位向量为[3 5 6 7 8 9]七则单元刚度系数炫应叠加到结构刚度矩阵的元素中去。
(3)将非结点荷载转换为等效结点荷载,等效的原则是。
(4)矩阵位移法中,在求解结点位移之前,主要工作是形成矩阵和_________________ 列阵。
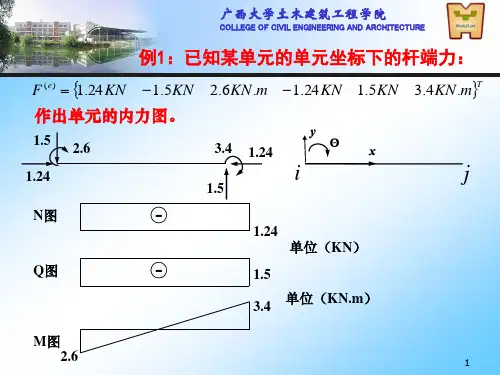
(5)用矩阵位移法求得某结构结点2的位移为4=[. V2 ft]T=[0.8 0.3 0.5]T,单元①的始、末端结点码为3、2,单元定位向量为尸>=[0 0 0 3 4 5]T ,设单元与x轴之间的夹角为a =买,则2 尹> =O(6 )用矩阵位移法求得平面刚架某单元在单元坐标系中的杆端力为F e =[7.5 -48 -70.9 -7.5 48 -121.09]T ,则该单元的轴力心=kN。
【解】(1)离散化,单元,整体;(2)灯8;(3)结点位移相等;(4)结构刚度,综合结点荷载;(5)[0 0 0 0.3 -0.8 0.5]。
(6)-7.5o离、空的值以及K ⑴中元素妍、愚、姒的值。
【解】各刚度系数的物理意义如习题解9.3图所示。
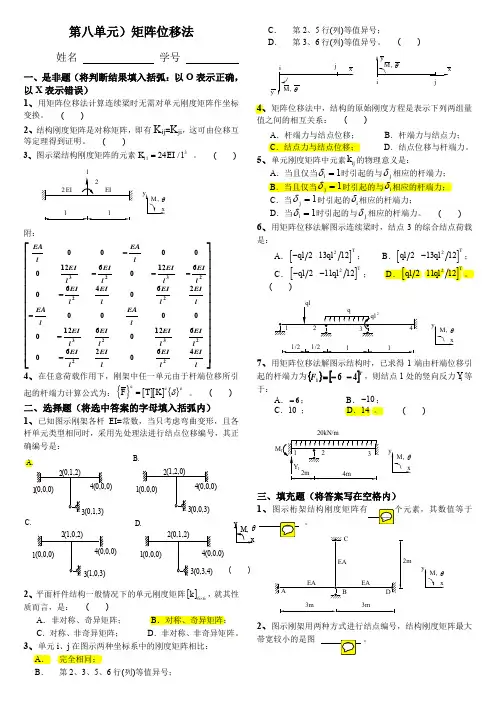
结构力学自测题(第八单元)矩阵位移法姓名 学号一、是 非 题(将 判 断 结 果 填 入 括 弧 :以 O 表 示 正 确 ,以 X 表 示 错 误 )1、用 矩 阵 位 移 法 计 算 连 续 梁 时 无 需 对 单 元 刚 度 矩 阵作 坐 标 变 换。
()2、结 构 刚 度 矩 阵 是 对 称 矩 阵 ,即 有K ij = K ji ,这 可 由位 移 互 等 定 理 得 到 证 明 。
() 3、图 示 梁 结 构 刚 度 矩 阵 的 元 素 K EI l 11324=/ 。
()EI llEI 212xy M , θ附:⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡--------l EI l EI l EI l EI lEI l EI l EI l EI l EAl EA l EI lEI l EI l EI l EI l EI l EI l EI lEA l EA 4602606120612000002604606120612000002223232223234、在 任 意 荷 载 作 用 下 ,刚 架 中 任 一 单 元 由 于 杆 端 位移 所 引 起 的 杆 端 力 计 算 公 式 为 :{}[][]{}FT K eee=δ 。
()二、选 择 题 ( 将 选 中 答 案 的 字 母 填 入 括 弧 内 )1、已 知 图 示 刚 架 各杆 EI = 常 数,当 只 考 虑 弯 曲 变 形 ,且各 杆 单 元 类 型 相 同 时 ,采 用 先 处 理 法 进 行 结 点 位 移 编 号 ,其 正 确 编 号 是 :(0,1,2) (0,0,0) (0,0,0) (0,1,3) (0,0,0) (1,2,0) (0,0,0) (0,0,3)(1,0,2)(0,0,0) (0,0,0) (1,0,3) (0,0,0)(0,1,2)(0,0,0) (0,3,4)A.B.C.D.2134 123 4 12 34 1 2 3 4 xyM , θ ( ) 2、平 面 杆 件 结 构 一 般 情 况 下 的 单 元 刚 度 矩 阵 []k 66⨯,就 其 性 质 而 言 ,是 :()A .非 对 称 、奇 异 矩 阵 ;B .对 称 、奇 异 矩 阵 ;C .对 称 、非 奇 异 矩 阵 ;D .非 对 称 、非 奇 异 矩 阵 。
第9章矩阵位移法习题解答习题9・1是非判断题(1)矩阵位移法既可计算超静定结构,又可以计算静定结构。
(T )(2)矩阵位移法棊木未知量的数冃与位移法棊木未知量的数冃总是相等的。
(|T*) F(3)单元刚度矩阵都具有对称性和奇界性。
(F )(4)在矩阵位移法中,整体分析的实质是建立各结点的平衡方程。
(T )(5)结构刚度短阵与单元的编号方式冇关。
(F )(6)原荷载与对应的等效结点荷载使结构产生相同的内力和变形。
(F )【解】(1)正确。
(2)错误。
位移法中某些不独立的杆端位移不计入基本未知量。
(3)错谋。
不计结点线位移的连续梁单元的单刚不具奇异性。
(4)正确。
(5)错误。
结点位移分量统-•编码会影响结构刚度矩阵,但单元或结点编码则不会。
(6)错误。
二者只产生相同的结点位移。
习题9.2填空题(1) ______________________________________________________________ 矩阵位移法分析包含三个基本环节,其一是结构的___________________________________ ,其二是_________ 分析,-其三是______ 分析。
(2)已知某单元©的定位向量为[3 5 6 7 8 9]丁,则单元刚度系数紜应叠加到结构刚度矩阵的元素—中去。
(3) ________________________________________________________________________ 将非结点荷载转换为等效结点荷载,等效的原则是____________________________________ o(4)矩阵位移法屮,在求解结点位移之前,主要工作是形成_____________________ 矩阵和_______________ 列阵。
(5)用矩阵位移法求得某结构结点2的位移为J2=[w2V2 ft]T=[O.S 0.3 0.5]丁,单元①的始、末端结点码为3、2,单元定位向量为= [0 0 0 3 4 5]T,设单元与兀轴之间的夹角为« = |,则(6 )用短阵位移法求得平面刚架某单元在单元坐标系中的杆端力为戸=[7.5 -48 -70.9 -7.5 48 -121.09]7,则该单元的轴力F* _______________________ k N。
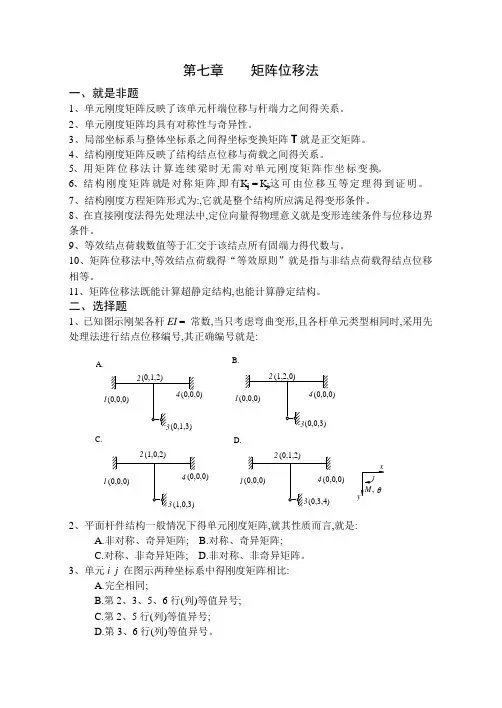
第七章 矩阵位移法一、就是非题1、单元刚度矩阵反映了该单元杆端位移与杆端力之间得关系。
2、单元刚度矩阵均具有对称性与奇异性。
3、局部坐标系与整体坐标系之间得坐标变换矩阵T 就是正交矩阵。
4、结构刚度矩阵反映了结构结点位移与荷载之间得关系。
5、用 矩 阵 位 移 法 计 算 连 续 梁 时 无 需 对 单 元 刚 度 矩 阵 作 坐 标 变 换。
6、结 构 刚 度 矩 阵 就是 对 称 矩 阵 ,即 有K i j = K j i ,这 可 由 位 移 互 等 定 理 得 到 证 明 。
7、结构刚度方程矩阵形式为:,它就是整个结构所应满足得变形条件。
8、在直接刚度法得先处理法中,定位向量得物理意义就是变形连续条件与位移边界条件。
9、等效结点荷载数值等于汇交于该结点所有固端力得代数与。
10、矩阵位移法中,等效结点荷载得“等效原则”就是指与非结点荷载得结点位移相等。
11、矩阵位移法既能计算超静定结构,也能计算静定结构。
二、选择题1、已知图示刚架各杆EI = 常数,当只考虑弯曲变形,且各杆单元类型相同时,采用先处理法进行结点位移编号,其正确编号就是:(0,1,2)(0,0,0)(0,0,0)(0,1,3)(0,0,0)(1,2,0)(0,0,0)(0,0,3)(1,0,2)(0,0,0)(0,0,0)(1,0,3)(0,0,0)(0,1,2)(0,0,0)(0,3,4)A.B.C.D.21341234123412342、平面杆件结构一般情况下得单元刚度矩阵,就其性质而言,就是:A.非对称、奇异矩阵;B.对称、奇异矩阵;C.对称、非奇异矩阵;D.非对称、非奇异矩阵。
3、单元i j 在图示两种坐标系中得刚度矩阵相比:A.完全相同;B.第2、3、5、6行(列)等值异号;C.第2、5行(列)等值异号;D.第3、6行(列)等值异号。
4、矩阵位移法中,结构得原始刚度方程就是表示下列两组量值之间得相互关系:A.杆端力与结点位移;B.杆端力与结点力;C.结点力与结点位移;D.结点位移与杆端力。
结构力学-矩阵位移法答案第七章 矩阵位移法(参考答案)四、1、[]K i i i i i i i i i =⎡⎣⎢⎢⎢⎤⎦⎥⎥⎥4202224122223333(+) 4(+) 02、[]K i i i i i i i =⎡⎣⎢⎢⎢⎢⎢⎤⎦⎥⎥⎥⎥⎥840012216612 0 对称,i EI l =/ 3、{}P ql ql ql ql =--⎧⎨⎪⎪⎩⎪⎪⎫⎬⎪⎪⎭⎪⎪2222242524248//// 4、{}[]T ql ql pl pl M P 12/)12/8/()8/(22-+-+=5、42.8851.4090(kN m).M6、R ql B=↑067857.() 7、⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧-=⎭⎬⎫⎩⎨⎧⎥⎦⎤⎢⎣⎡3320392422821θθi i i i⎭⎬⎫⎩⎨⎧=⎭⎬⎫⎩⎨⎧39821121i θθ ()()⎭⎬⎫⎩⎨⎧-=⎭⎬⎫⎩⎨⎧⎭⎬⎫⎩⎨⎧-=⎭⎬⎫⎩⎨⎧01249826221121M M M M8、[]K 2221636003600=⨯⎡⎣⎢⎤⎦⎥ 6104 9、[]K i l i l i l i i i i EI l =-⎡⎣⎢⎢⎢⎢⎤⎦⎥⎥⎥⎥=366622/// 12 4对称,式中: 10、(0,0)(1,2)(0,3)(0,0)① ② ③{}P =--⋅-⋅⎧⎨⎪⎩⎪⎫⎬⎪⎭⎪ kN 5kN m 16kN m 211、{}[]T P 0 34 7-=12、 {}{}{}{}δδ①②①②=-⎧⎨⎪⎪⎪⎩⎪⎪⎪⎫⎬⎪⎪⎪⎭⎪⎪⎪=-⎧⎨⎪⎪⎪⎩⎪⎪⎪⎫⎬⎪⎪⎪⎭⎪⎪⎪=-⎧⎨⎪⎪⎪⎩⎪⎪⎪⎫⎬⎪⎪⎪⎭⎪⎪⎪=---⎧⎨⎪⎪⎪⎩⎪⎪⎪⎫⎬⎪⎪⎪⎭⎪⎪⎪ , , , 005120512000525252525252525233l EI l EI F F 13、i K l EI i i K l EA k k l i K 4,/,12,/,/361333222====+=14、K EA l EI l K EI l K 223342151260=+==//,/,15、[][][][][][]K K K K K K 222222222421=++=①②③③,16、[][][][][][][][]K K K K K K K K =+++⎡⎣⎢⎢⎢⎤⎦⎥⎥⎥22222112112222①③③③③②④17、[]⎥⎦⎤⎢⎣⎡=336lEI K18、(0,0,0)统一编码如图:① ② ③ (1,0,4)63(0,0,0)1(1,0,2)4(1,0,3)5(0,0,0)219、k k k k k k 221112212222①②②②②③++⎡⎣⎢⎢⎤⎦⎥⎥ 20、21、{}⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧-=2kN.m 12kN 2kN 3EP 22、{}P ql ql ql 2E 24=--⎧⎨⎪⎩⎪⎫⎬⎪⎭⎪//22223、P ql P ql P ql 1324224===-,/,[]4 0 4 0 0 46- 0 0 12223⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎪⎭⎫ ⎝⎛+=l EI l EI l EIl EI l EI l EA K []K =⨯⎡⎣⎢⎢⎢⎤⎦⎥⎥⎥1061203003240300300424、{}P ql ql ql =-⎧⎨⎪⎩⎪⎫⎬⎪⎭⎪ ///222524225、P ql P ql P ql 45622212==-=/,/,/26、P p l P P ql P M P l q l 113341282812=-=--=-+,,27、P ql P ql P ql P 327891112220==-=-=/,/,/,28、{}[]P =---6 22 14 5 12 18T29、{}[]P =---4 10 4 0 6 4T30、{}P P P Pl 2 =--⎧⎨⎪⎩⎪⎫⎬⎪⎭⎪///2323431、(0,0,0)(1,4,3)(0,0,0)(1,2,3)1234 {}P =---⋅⎧⎨⎪⎪⎩⎪⎪⎫⎬⎪⎪⎭⎪⎪38170kN kN kN m32、(1,0,2)(3,4,5)(0,6,0,)(0,0,0) {}P ql ql ql ql ql =--⎧⎨⎪⎪⎪⎪⎩⎪⎪⎪⎪⎫⎬⎪⎪⎪⎪⎭⎪⎪⎪⎪ 01112238222//// 33、{}[]P T 40 -32 -14=34、{}P =--⋅⎧⎨⎪⎩⎪⎫⎬⎪⎭⎪ kN 10kN 10kN m 1035、{}TPl ql ql P P ⎥⎦⎤⎢⎣⎡+--=812,2,2,0,0236、{}[]∆=0 0 0 -0.1569 -0.2338 0.4232 0 0 0T,2336.02=②F37、F F 3603330333=⋅=-⋅.,.kN m kN m38、{}⎪⎪⎪⎪⎭⎪⎪⎪⎪⎬⎫⎪⎪⎪⎪⎩⎪⎪⎪⎪⎨⎧----=kN.m kN kN kN.m kN kN 1321726.193.19561.651726.193.19③F39、40、{}Fql ql ql ql ①分=⎧⎨⎪⎪⎪⎪⎩⎪⎪⎪⎪⎫⎬⎪⎪⎪⎪⎭⎪⎪⎪⎪ 007902340020800575722....() 41、M 28925②=-.kN 42、123①②③ (0,0)(0,0)(0,1)(0,1)(2,3)(2,3)[]K EA l =⨯+-+---⎡⎣⎢⎢⎢⎤⎦⎥⎥⎥24221111221111143、{}P =⎧⎨⎩⎫⎬⎭8kN 6kN 44、{}[]kN P T 40,30,20,10--=45、{}F①=-⎧⎨⎪⎪⎩⎪⎪⎫⎬⎪⎪⎭⎪⎪1116011160..kN46、{}∆=(/())1EA ×[]T 1167.111- 137.680-01139.555- 00322.342 {}[]F①=-85581.kN 85.581kN T47、NP ①=3(压 力 )48、{}⎪⎪⎭⎪⎪⎬⎫⎪⎪⎩⎪⎪⎨⎧-=0505 kN kN ①F49、l EAlEI K +=3441245=K2134(1,2,3)(10,11,12)(7,8,9)(4,5,6)(4,5,0)①②③(7,8,0)50、(0,0,0)(0,0,0)(1,2,3)(0,0,0)(1,2,0)③①②1352451、K EA l K EI l EA l K EI l 4455366336412==+=/,//,/ 52、积分变换法求解定解问题为了说明傅氏变换法解非齐次方程特别简便,我们特举一强迫弦振动问题: 求解无限长弦的强迫振动方程的初值问题200(,), ()|() |()tt xx t t t u a u f x t x u x u x ϕψ==⎧-=-∞<<∞⎪=⎨⎪=⎩ 【解】 作傅氏变换[(,)](,), [(,)](,),[()](), [()]()u x t U t f x t F t x x ωωϕωψω===Φ=ψF F F F我们容易得到原定解问题可变换为下列常微分方程的问题222200(,)(,)(,)|(),(,)|(),t t t U a U t F t t U t U t ωωωωωωω==⎧∂+=⎪∂⎪⎨=Φ⎪⎪=ψ⎩上述问题的解为01()(,)(,)sin ()d ()cos()sin()t U t F a t at a t a a ωωωτωττωωωωωψ=-+Φ+⎰利用傅氏变换的性质有1 1[(,)](,)1[(,)](,)d i xx F t f x t F f ωωτξτξω--==⎰F F故得到()1i ()1[(,)](,)d i x a t a t x e F t f τωτωξτξω±--±-=⎰F i ()i ()1sin[()][]2i a t a t a t e e ωτωτωτ----=-代入得到()()01(,)[(,)d (,)d ]d 211 [()()]()d 22t x a t x a t x x x atx at u x t f f a x at x at a ττξτξξτξτϕϕψξξ+---+-=-+++-+⎰⎰⎰⎰即得()0()1(,)(,)d d 211 [()()]()d 22t x a t x a t x atx at u x t f ax at x at a ττξτξτϕϕψξξ+---+-=+++-+⎰⎰⎰例15.2 求解无限长细杆的热传导(无热源)问题200, (,0)|() t xx t u a u x t u x ϕ=⎧-=-∞<<∞>⎨=⎩【解】 作傅氏变换,[(,)](,)u x t U t ω=F [()]()x ϕω=ΦF 定解问题变换为22(,)0(,0)()U a U t U ωωωω'⎧+=⎨=Φ⎩ 常微分方程的初值问题的解是22(,)()a tU t e ωωω-=Φ 再进行逆傅里叶变换,22221i i i 1(,)[(,)]()d 2π1 [()d ]d 2πa t x a t x u x t U t e e e e e ωωωξωωωωωϕξξω∞---∞∞∞---∞-∞==Φ=⎰⎰⎰F交换积分次序得22i ()1(,)()[d ]d 2πa t x u x t e e ωωξϕξωξ∞∞---∞-∞=⎰⎰引用积分公式22224d e e eβσωβωσω∞--∞=⎰且令 i()x σβξ==- 以便利用积分公式,即得到天津大学专用纸学院专业班年级学号共 3 页第 1 页。

第十二章 矩阵位移法【例12-1】 图 a 所示 连 续 梁 ,EI=常数,只 考 虑 杆 件 的 弯 曲 变 形 。
分别用位移法和矩阵位移法计算。
图12-1解:(1)位移法解∙基本未知量和基本结构的确定 用位移法解的基本结构如图c 所示。
这里我们将结点1处的转角也作为基本未知数,这样本题仅一种基本单元,即两端固定梁。
∙位移法基本方程的建立⎪⎭⎪⎬⎫=+θ+θ+θ=+θ+θ+θ=+θ+θ+θ000333323213123232221211313212111P P P R K K K R K K K R K K K 将上式写成矩阵形式⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧=⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧+⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧θθθ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡000321321333231232221131211P P P R R R K K K K K K K K K∙系数项和自由项 计算(须绘出单位弯矩图和荷载弯矩图)由图d ,结点力矩平衡条件∑=0M ,得 l EI K 411=,l EI K 221=,031=K由图e ,结点力矩平衡条件∑=0M ,得l EI K 212=,l EI l EI l EI K 84422=+=,EI K 232=由图f ,结点力矩平衡条件∑=0M ,得 013=K ,l EI K 223=,EI l EI EI K 84433=+=由图g ,结点力矩平衡条件∑=0M ,得1Pl R p -=,2Pl R P -=,03=P R将系数项和自由项代入位移法基本方程,得⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧=⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧--+⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧θθθ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡0000118820282024321Pl l EI ∙解方程,得⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧-=⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧θθθ14114162321EI Pl ∙由叠加法绘弯矩图,如图h 所示。
(2)矩阵位移法解∙对单元和结点编号(图a ) 本题只考虑弯曲变形的影响,故连续梁每个结点只有一个角位移未知数。
1文档收集于互联网,已整理,word 版本可编辑.第八章 矩阵位移法 – 老八校一、判断题:1、单元刚度矩阵反映了该单元杆端位移与杆端力之间的关系。
2、单元刚度矩阵均具有对称性和奇异性。
3、局部坐标系与整体坐标系之间的坐标变换矩阵T 是正交矩阵。
4、结构刚度矩阵反映了结构结点位移与荷载之间的关系。
5、结构刚度方程矩阵形式为:[]{}{}K P ∆=,它是整个结构所应满足的变形条件。
6、图示结构用矩阵位移法计算时(计轴向变形)未知量数目为8个。
7、在直接刚度法的先处理法中,定位向量的物理意义是变形连续条件和位移边界条件。
8、等效结点荷载数值等于汇交于该结点所有固端力的代数和。
9、矩阵位移法中,等效结点荷载的“等效原则”是指与非结点荷载的结点位移相等。
10、矩阵位移法既能计算超静定结构,也能计算静定结构。
11、已知图示刚架各杆EI = 常数,当只考虑弯曲变形,且各杆单元类型相同时,采用先处理法进行结点位移编号,其正确编号是: 二、计算题:12、用先处理法计算图示结构刚度矩阵的元素133322,,K K K 。
13、用先处理法计算图示刚架结构刚度矩阵的元素153422,,K K K 。
EI ,EA 均为常数。
14、计算图示结构整体刚度矩阵的元素665544,,K K K 。
E 为常数。
15、写出图示结构以子矩阵形式表达的结构原始刚度矩阵的子矩阵[][]K K 2224,。
16、已知平面桁架单元在整体坐标系中的单元刚度矩阵,计算图示桁架结构原始刚度矩阵[]K 中的元素,,7877K K EA =常数。
,cos α=C ,sin α=S ,C C A ⋅= S S D S C B ⋅=⋅=,,各杆EA 相同。
2文档收集于互联网,已整理,word 版本可编辑.17、计算图示刚架结构刚度矩阵中的元素8811,K K (只考虑弯曲变形)。
设各层高度为h ,各跨长度为l h l 5.0,=,各杆EI 为常数。
18、计算图示结构原始刚度矩阵的元素4544,K K 。
习 题8-1 试说出单元刚度矩阵的物理意义及其性质与特点。
8-2 试说出空间桁架和刚架单元刚度矩阵的阶数。
8-3 试分别采用后处理法和先处理法列出图示梁的结构刚度矩阵。
(a)解:(a )用后处理法计算 (1)结构标识(2)建立结点位移向量,结点力向量[]T44332211 θνθνθνθν=∆[]Ty M F M F M F M F F 4y43y32y211 =θ(3)计算单元刚度矩阵⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡-=⎥⎥⎦⎤⎢⎢⎣⎡=2222322211211462661261226466126122EI 21 l l -l l l -l -l l -l l l l - l k k k k k ①①①①①⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡-=⎥⎥⎦⎤⎢⎢⎣⎡=222233332232223 33 6 3632336 362EI 21 l l - l l l - l -l l -l l l -l l k k k k k ②②②②②lll⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡-=⎥⎥⎦⎤⎢⎢⎣⎡=222234443343323 33 6 3632336 362EI 2 1 l l - l l l - l -l l -l l l -l l k k k k k ③③③③③(4)总刚度矩阵⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡++=222222222234443343333322322222112112 3300003 6 3 6 000 03403003601236000 0 3632600 363186120000 26460 0 0 06126122EI 0 0 00 0 0 4 3 2 1 4 3 2 1 l l -l l l - l - - l l -l l l l - l - - l l -l l -l l l l - -l -- l l -l l l l - l k k k k k k k k k k k k k ③③③③②②②②①①①①θ (5)建立结构刚度矩阵支座位移边界条件[][]00004311 θ θ θν=将总刚度矩阵中对应上述边界位移行列删除,得刚度结构矩阵。
矩阵位移法、结构动力计算(总分:100.00,做题时间:90分钟)一、{{B}}填空题{{/B}}(总题数:5,分数:10.00)1.用先处理法求解如下图所示结构(图中圆括号内数码为结点定位向量),则荷载向量{P}=______。
(分数:2.00)填空项1:__________________ (正确答案:[-2 5 16]T)解析:2.干扰力频率θ与自振频率ω之比在 1区间时称共振区。
(分数:2.00)填空项1:__________________ (正确答案:0.75~1.25)解析:3.下图所示体系EI=常数(忽略杆件质量),则结构的自振频率ω=______;在图示简谐荷载(荷载频率为θ)作用下,体系的振动微分方程为______。
(分数:2.00)填空项1:__________________ (正确答案:[*])解析:自振频率的计算与外荷载无关,可用柔度法求解。
简谐荷载作用下的振动微分方程也可由柔度法列出:y(t)=[*]+δ12Msinθt,这里设质点竖直方向为1、转角方向为2,求出此两柔度系数便可列出该微分方程。
4.两自由度振动体系,已知质量m1=2m,m2=m,其第一振型向量为[1 5]T,则第二振型向量为[1 1]T。
(分数:2.00)填空项1:__________________ (正确答案:[*])解析:根据主振型的第一正交关系{Y(1)}T[M]{Y(2)}=0求解。
5.已知下图所示体系的第二主振型为,则第一主振型为______。
已知m1=m2=m,不计阻尼,不计柱的质量。
(分数:2.00)填空项1:__________________ (正确答案:[*])解析:利用正交性。
二、{{B}}选择题{{/B}}(总题数:10,分数:20.00)6.在矩阵位移法计算中,下图所示各图中单元刚度矩阵为奇异矩阵的是______。
A. B.C. D(分数:2.00)A.B. √C.D.解析:B图为几何可变体系,其所对应的单元刚度矩阵为奇异矩阵。
第十章 矩阵位移法一、判断题:1、单元刚度矩阵反映了该单元杆端位移与杆端力之间的关系。
2、单元刚度矩阵均具有对称性和奇异性。
3、局部坐标系与整体坐标系之间的坐标变换矩阵T 是正交矩阵。
4、结构刚度矩阵反映了结构结点位移与荷载之间的关系。
5、结构刚度方程矩阵形式为:[]{}{}K P ∆=,它是整个结构所应满足的变形条件。
6、图示结构用矩阵位移法计算时(计轴向变形)未知量数目为8个。
7、在直接刚度法的先处理法中,定位向量的物理意义是变形连续条件和位移边界条件。
8、等效结点荷载数值等于汇交于该结点所有固端力的代数和。
9、矩阵位移法中,等效结点荷载的“等效原则”是指与非结点荷载的结点位移相等。
10、矩阵位移法既能计算超静定结构,也能计算静定结构。
11、已知图示刚架各杆EI = 常数,当只考虑弯曲变形,且各杆单元类型相同时,采用先处理法进行结点位移编号,其正确编号是:(0,1,2)(0,0,0)(0,0,0)(0,1,3)(0,0,0)(1,2,0)(0,0,0)(0,0,3)(1,0,2)(0,0,0)(0,0,0)(1,0,3)(0,0,0)(0,1,2)(0,0,0)(0,3,4)A.B.C.D.2134123412341234( )二、计算题:12、用先处理法计算图示结构刚度矩阵的元素133322,,K K K 。
123ll4l5EI2EIEA(0,0,0)(0,0,1)(0,2,3)(0,0,0)(0,2,4)(0,0,0)EI13、用先处理法计算图示刚架结构刚度矩阵的元素153422,,K K K 。
EI ,EA 均为常数。
l,0)14、计算图示结构整体刚度矩阵的元素665544,,K K K 。
E 为常数。
l l1342A , I AA /222A I , 2A15、写出图示结构以子矩阵形式表达的结构原始刚度矩阵的子矩阵[][]K K 2224,。
[][]k k 1112 [][]k k 2122 []k =ii iii单刚分块形式为 :16、已知平面桁架单元在整体坐标系中的单元刚度矩阵,计算图示桁架结构原始刚度矩阵[]K 中的元素,,7877K K EA =常数。
,cos α=C ,sin α=S ,C C A ⋅=S S D S C B ⋅=⋅=,,各杆EA 相同。
l[]k EA l i=A B A BD B D A B D -ii---对称17、计算图示刚架结构刚度矩阵中的元素8811,K K (只考虑弯曲变形)。
设各层高度为h ,各跨长度为l h l 5.0,=,各杆EI 为常数。
18、计算图示结构原始刚度矩阵的元素4544,K K 。
l19、用先处理法写出图示梁的整体刚度矩阵[]K 。
123llli 0123i i20、用先处理法写出图示梁的结构刚度矩阵[]K 。
123ll4lEI EI EI 2321、已知图示结构在整体坐标系中的单元刚度矩阵。
用先处理法集成结构刚度矩阵[]K 。
(用子块形式写出)。
[][]k k 1112 [][]k k 2122 []k =ii iii单刚分块形式为 :22、用先处理法写出图示结构的结构刚度矩阵[]K 。
E =常数。
ll)23、用先处理法写出图示刚架的结构刚度矩阵[]K ,只考虑弯曲变形。
EI EI EIEI=o olll24、用先处理法写出图示结构的结构刚度矩阵[]K 。
各杆长度为l ,EA 、EI 为常数。
ABCD25、用先处理法写出图示结构的结构刚度矩阵[]K 。
各杆长度为 l 。
ABCD EA EIEI226、用先处理法写出以子块表示的图示结构的结构刚度矩阵[]K 。
m12m27、用先处理法写出图示桁架的结构刚度矩阵[]K 。
已知各杆EA =常数。
[][]kkEA l ①②==--⎡⎣⎢⎢⎢⎢⎤⎦⎥⎥⎥⎥1010000010100000,整体坐标系中的单元刚度矩阵:[]k EA l ③=--------⎡⎣⎢⎢⎢⎢⎤⎦⎥⎥⎥⎥241111111111111111l28、用先处理法写出图示刚架结构刚度矩阵[]K 。
已知:[][][]k k k ①②③===⨯--------⎡⎣⎢⎢⎢⎢⎢⎢⎢⎢⎤⎦⎥⎥⎥⎥⎥⎥⎥⎥1030000300000123001230030100030503000030000012300123003050030100429、计算图示结构结点3的等效结点荷载列阵{}P 3E 。
m224m43kN/m30、计算图示结构结点2的等效结点荷载列阵{}P 2E 。
l /2ql /2q31、计算图示结构结点2的等效结点荷载列阵{}P 2E 。
l /2ll /2l32、计算图示结构的综合结点荷载列阵{}P 。
l /2l /2l /2l /2ll33、计算图示连续梁对应于自由结点位移的荷载列阵{}P 。
l /2l l /234、计算图示连续梁对应于自由结点位移的荷载列阵{}P 。
m3m3m 4m 435、用先处理法计算图示连续梁的结点荷载列阵{}P 。
m4m4m4第十四章结构动力学一、判断题:1、结构计算中,大小、方向随时间变化的荷载必须按动荷载考虑。
2、仅在恢复力作用下的振动称为自由振动。
3、单自由度体系其它参数不变,只有刚度EI增大到原来的2倍,则周期比原来的周期减小1/2。
4、结构在动力荷载作用下,其动内力与动位移仅与动力荷载的变化规律有关。
5、图示刚架不计分布质量和直杆轴向变形,图a刚架的振动自由度为2,图b刚架的振动自由度也为2。
6、图示组合结构,不计杆件的质量,其动力自由度为5个。
7、忽略直杆的轴向变形,图示结构的动力自由度为4个。
8、由于阻尼的存在,任何振动都不会长期继续下去。
9、设ωω,D分别为同一体系在不考虑阻尼和考虑阻尼时的自振频率,ω与ωD的关系为ωω=。
D二、计算题:10、图示梁自重不计,求自振频率ω。
l l/411、图示梁自重不计,杆件无弯曲变形,弹性支座刚度为k ,求自振频率ω。
l /2l /212、求图示体系的自振频率ω。
l l0.5l 0.513、求图示体系的自振频率ω。
EI = 常数。
ll 0.514、求图示结构的自振频率ω。
l l15、求图示体系的自振频率ω。
EI =常数,杆长均为l 。
16、求图示体系的自振频率ω。
杆长均为l 。
17、求图示结构的自振频率和振型。
l /2l /2l /18、图示梁自重不计,W EI ==⨯⋅2002104kN kN m 2,,求自振圆频率ω。
B2m2m19、图示排架重量W 集中于横梁上,横梁EA =∞,求自振周期ω。
EIEIW20、图示刚架横梁∞=EI 且重量W 集中于横梁上。
求自振周期T 。
EIEIWEI 221、求图示体系的自振频率ω。
各杆EI = 常数。
a aa22、图示两种支承情况的梁,不计梁的自重。
求图a 与图b 的自振频率之比。
l /2l/2(a)l /2l /2(b)23、图示桁架在结点C 中有集中重量W ,各杆EA 相同,杆重不计。
求水平自振周期T 。
3m 3m24、忽略质点m 的水平位移,求图示桁架竖向振动时的自振频率ω。
各杆EA = 常数。
m 4m4m25、图示体系E P W I =⨯====-2102052048004kN /cm s kN, kN, cm 214,,θ。
求质点处最大动位移和最大动弯矩。
W4mm2t26、图示体系EI k =⨯⋅==2102035kN m s 2-1,,θ×1055N /m, P =×N 103。
kN W 10=。
求质点处最大动位移和最大动弯矩。
m2m2sin P27、求图示体系在初位移等于l/1000,初速度等于零时的解答。
θωω=020.( 为自振频率),不计阻尼。
l28、图示体系受动力荷载作用,不考虑阻尼,杆重不计,求发生共振时干扰力的频率θ。
/3P t sin( )29、已知:m P ==38t, kN ,干扰力转速为150r/min ,不计杆件的质量,EI =⨯⋅6103kN m 2。
求质点的最大动力位移。
2m 2m30、图示体系中,电机重kN 10=W 置于刚性横梁上,电机转速n r =500/min ,水平方向干扰力为) sin(kN 2)(t t P θ⋅=,已知柱顶侧移刚度kN/m 1002.14⨯=k ,自振频率ω=-100s1。
求稳态振动的振幅及最大动力弯矩图。
m31、图示体系中,kN 10=W ,质点所在点竖向柔度917.1=δ,马达动荷载Pt t ()sin()=4kN θ,马达转速n r =600/min 。
求质点振幅与最大位移。
32、图示体系中,W =8kN ,自振频率ω=-100s 1,电机荷载P (t ) = 5kN ·sin(θt ),电机转速n = 550r/min 。
求梁的最大与最小弯矩图。
2m 2m P t ()。