结构力学矩阵位移法
- 格式:ppt
- 大小:1.06 MB
- 文档页数:2
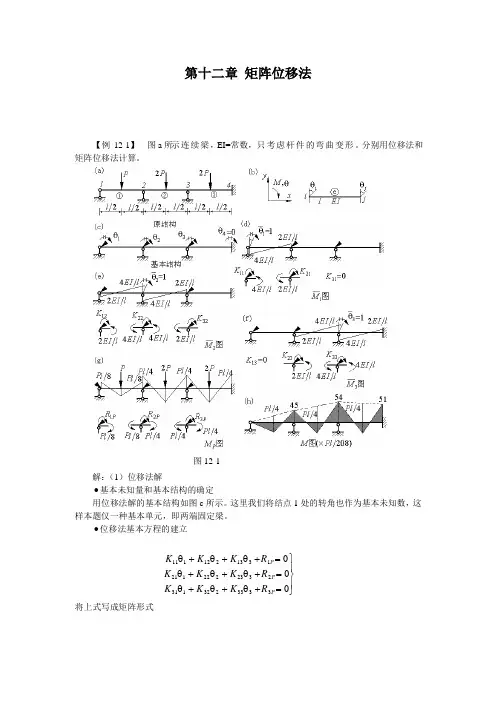
第十二章 矩阵位移法【例12-1】 图 a 所示 连 续 梁 ,EI=常数,只 考 虑 杆 件 的 弯 曲 变 形 。
分别用位移法和矩阵位移法计算。
图12-1解:(1)位移法解•基本未知量和基本结构的确定用位移法解的基本结构如图c 所示。
这里我们将结点1处的转角也作为基本未知数,这样本题仅一种基本单元,即两端固定梁。
•位移法基本方程的建立⎪⎭⎪⎬⎫=+θ+θ+θ=+θ+θ+θ=+θ+θ+θ000333323213123232221211313212111P P P R K K K R K K K R K K K 将上式写成矩阵形式⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧=⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧+⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧θθθ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡000321321333231232221131211P P P R R R K K K K K K K K K•系数项和自由项 计算(须绘出单位弯矩图和荷载弯矩图)由图d ,结点力矩平衡条件∑=0M ,得 EI K 411=,l EI K 221=,031=K由图e ,结点力矩平衡条件∑=0M ,得l EI K 212=,l EI l EI l EI K 84422=+=,l EI K 232=由图f ,结点力矩平衡条件∑=0M ,得 013=K ,l EI K 223=,l EI EI EI K 84433=+=由图g ,结点力矩平衡条件∑=0M ,得81Pl R p -=,2Pl R P -=,03=P R将系数项和自由项代入位移法基本方程,得⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧=⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧--+⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧θθθ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡0000118820282024321Pl l EI •解方程,得⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧-=⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧θθθ14114162321EI Pl •由叠加法绘弯矩图,如图h 所示。
(2)矩阵位移法解•对单元和结点编号(图a ) 本题只考虑弯曲变形的影响,故连续梁每个结点只有一个角位移未知数。
《结构力学》第十章矩阵位移法矩阵位移法是结构力学中的一种重要分析方法,通过将结构的受力分析转化为矩阵运算,可以有效地求解复杂结构的位移和应力分布。
本文将分为四个部分来介绍矩阵位移法的基本原理和应用。
第一部分将介绍矩阵位移法的基本原理。
矩阵位移法基于结构的受力平衡方程和变形条件,建立了适用于不同类型结构的一般形式的位移函数。
通过对这些位移函数进行适当组合,可以得到一个较为简化的位移矩阵方程。
这个方程可以通过矩阵运算求解,从而得到结构的位移和应力分布。
第二部分将介绍矩阵位移法的应用。
矩阵位移法可以用于求解各种类型的结构,包括梁、柱、框架等。
具体应用时,首先需要确定结构的边界条件和受力情况,然后根据结构的几何形状和材料性质,建立相应的位移函数。
之后,将位移函数按照一定的规则组合起来,建立一个位移矩阵方程。
通过解这个方程,可以得到结构的位移和应力分布。
第三部分将介绍矩阵位移法的优点。
相比于传统的力方法,矩阵位移法具有计算简单、准确性高、适用范围广等优点。
这是因为矩阵位移法可以通过矩阵运算将结构的受力分析转化为代数运算,减少了繁琐的计算过程,并且可以应用于各种不规则结构。
第四部分将介绍矩阵位移法的局限性。
矩阵位移法虽然具有很多优点,但也有一些限制。
首先,矩阵位移法对结构的刚度矩阵的求取较为复杂,需要通过精确和谐振数法等途径进行求解。
其次,矩阵位移法不能用于解决非线性和动力问题。
总结起来,矩阵位移法是一种重要的结构力学分析方法,通过将结构的受力分析转化为矩阵运算,可以有效地求解复杂结构的位移和应力分布。
它具有计算简单、准确性高、适用范围广等优点,但也有一些局限性。
因此,在实际应用中需要根据具体情况选择合适的方法。
同时,矩阵位移法的进一步研究和发展也是一个非常重要的方向。