同济大学朱慈勉-结构力学第8章矩阵位移法
- 格式:pdf
- 大小:4.93 MB
- 文档页数:57
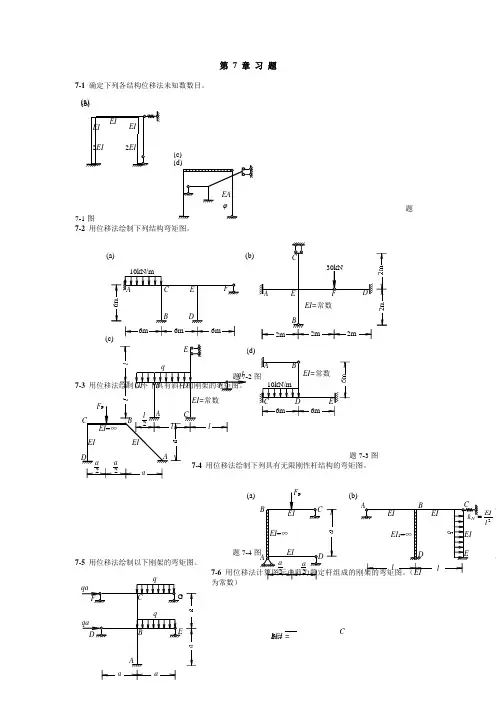
C 第 7 章 习 题7-1 确定下列各结构位移法未知数数目。
题7-1图7-2 用位移法绘制下列结构弯矩图。
用位移法绘制以下下具有斜杆的刚架的弯矩图。
题7-3图题7-47-5 用位移法绘制以下刚架的弯矩图。
7-6 用位移法计算图示由剪力静定杆组成的刚架的弯矩图。
(EI为常数)A 6m 6m 6m(a) D(b)GF C E D 常数 6m 6m a 22(a)EI 2lEI k l l (b)(a) (b) (c) aak N = =3EIl 3BAliiD题 7-5图题 7-6图7-7 利用对称性,用位移法求作下列结构的弯矩图。
题7-7图 7-8 试用位移法求作下列结构由于支座位移产生的弯矩。
7-9 用混合法求作弯矩图。
题 7-9图C E F 2m 2m A ′D ′B ′ EI 2EI4m 3EI A D C B l EI EIϕl Δ=ϕ题 7-8图(a) B 4m 4m DAC B 2kN/m16m (b) EI=常数第7章7-1 (a )一个角位移未知量。
(b )三个角位移未知量,一个线位移未知量。
(c )四个角位移未知量,三个线位移未知量。
(d )三个角位移未知量,一个线位移未知量。
(e )一个角位移未知量,一个线位移未知量;或两个线位移未知量。
(f )三个角位移未知量,两个线位移未知量。
(g )一个角位移未知量,一个线位移未知量。
(h )一个角位移未知量,一个线位移未知量。
(i )三个角位移未知量,一个线位移未知量。
7-5 (a )2472ql MDC-=,62qlMDB=,8Q ql F AD -=。
(b )m kN 26⋅=BA M (上边受拉),m kN 14⋅=BC M (左侧受拉)。
(c )P49F MAD=(左侧受拉)。
(d )P N 6.0F F BE =,P N 2.1F F CF =,a F M BA P 6.0=(上边受拉)。
(e )PN )21(2221F F DC ++=,PN )21(22F F AC +=。

同济大学朱慈勉 结构力学 第8章 矩阵位移法习题答案8-1 试说出单元刚度矩阵的物理意义及其性质与特点。
8-2 试说出空间桁架和刚架单元刚度矩阵的阶数。
8-3 试分别采用后处理法和先处理法列出图示梁的结构刚度矩阵。
(a)解:(a )用后处理法计算 (1)结构标识(2)建立结点位移向量,结点力向量[]T44332211 θνθνθνθν=∆[]T y M F M F M F M F F 4y43y32y211 =θ(3)计算单元刚度矩阵⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡-=⎥⎥⎦⎤⎢⎢⎣⎡=2222322211211462661261226466126122EI 21 l l -l l l -l -l l -l l l l - l k k k k k ①①①①①⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡-=⎥⎥⎦⎤⎢⎢⎣⎡=222233332232223 33 6 3632336 362EI 21 l l - l l l - l -l l -l l l -l l k k k k k ②②②②②lll⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡-=⎥⎥⎦⎤⎢⎢⎣⎡=222234443343323 33 6 3632336 362EI 2 1 l l - l l l - l -l l -l l l -l l k k k k k ③③③③③(4)总刚度矩阵⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡++=222222222234443343333322322222112112 3300003 6 3 6 000 03403003601236000 0 3632600 363186120000 26460 0 0 06126122EI 0 0 00 0 0 4 3 2 1 4 3 2 1 l l -l l l - l - - l l -l l l l - l - - l l -l l -l l l l - -l -- l l -l l l l - l k k k k k k k k k k k k k ③③③③②②②②①①①①θ (5)建立结构刚度矩阵支座位移边界条件[][]00004311 θ θ θν=将总刚度矩阵中对应上述边界位移行列删除,得刚度结构矩阵。
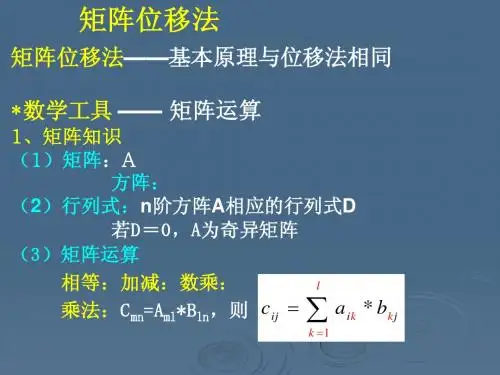

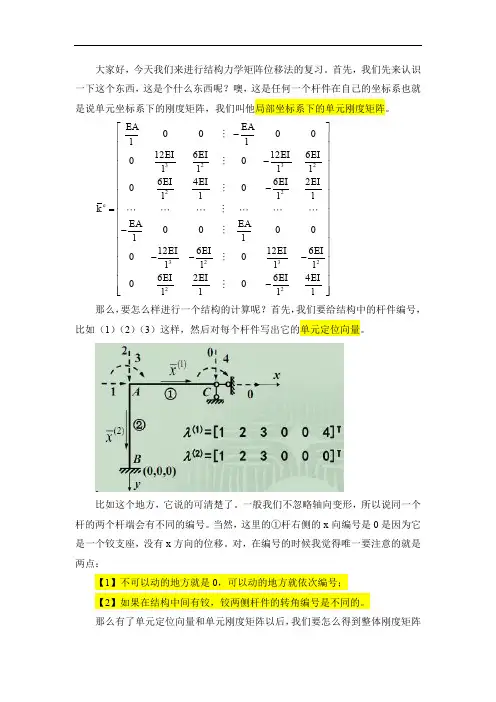

第8章 矩阵位移法 ♍♦♐ 制作同济大学教材笔记(本章答案陆续上传中)一、知识要点: 1.结构坐标系一般采用右手坐标系,记为xoy 。
此时,结点位移和结点力均取与结构坐标系方向一致为正,其中结点的角位移和结点力矩按右手法则均取逆时针方向为正。
2.局部坐标系主要注意α角的定义,看如下图示即明白。
yxoijexyα3.桁架单元刚度方程000000000000eeexi i yi i xj j yj j EAEA F u l lF v EA EAF u l l F v ⎛⎫-⎛⎫⎛⎫ ⎪ ⎪ ⎪⎪ ⎪ ⎪⎪= ⎪ ⎪⎪ ⎪ ⎪-⎪ ⎪ ⎪⎪⎝⎭⎝⎭⎪⎝⎭桁架结构变换矩阵Tcos sin 00sin cos 0000cos sin 00sin cos T αααααααα⎛⎫⎪-⎪= ⎪ ⎪-⎝⎭桁架在结构坐标系下的单元刚度矩阵22222222ee c sc c sc sc s sc s EA k l c sc c sc sc s sc s ⎛⎫-- ⎪-- ⎪=⎪-- ⎪⎪--⎝⎭4.刚架单元刚度方程32322232322212612664621261266264eeeyi i i i yj j j j EIEI EI EI l l l l F v EI EI EI EI M l l l l EI EI EI EI F v l l l l M EI EI EI EI l l l l θθ⎛⎫- ⎪⎪⎛⎫⎛⎫ ⎪ ⎪ ⎪- ⎪⎪ ⎪=⎪ ⎪ ⎪ ⎪ ⎪ ⎪--- ⎪ ⎪ ⎪⎝⎭⎝⎭⎪⎪-⎝⎭5.受轴向力作用的一般刚架单元刚度方程32322232322200001261260064620000001261260062640eexi i yi i i i xj j yj j EAEA ll EI EIEI EI F u l l l l F v EI EI EI EI M l l l l EA EA F u l l F v EIEI EI EI M l l l l EI EI EI EI l lllθ⎛⎫- ⎪⎪ ⎪⎛⎫- ⎪ ⎪⎪ ⎪ ⎪ ⎪- ⎪ ⎪=⎪ ⎪ ⎪- ⎪ ⎪ ⎪ ⎪ ⎪ ⎪--- ⎪⎝⎭⎪ ⎪- ⎪⎝⎭ej j ⎛⎫⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎝⎭一般刚架单元刚度方程的坐标变换矩阵Tcos sin 0000sin cos 0000001000000cos sin 0000sin cos 0001T αααααααα⎛⎫⎪- ⎪ ⎪=⎪ ⎪ ⎪- ⎪ ⎪⎝⎭结构坐标系下的一般刚架单元刚度矩阵e k12412423523545645612412423523545645622ea a a a a a a a a a a a a a a a a a k a a a a a a a a a a a a a a a a a a --⎛-- --=---- ---- --⎝6.为什么已知杆端位移能求得单元的唯一杆端力,而已知杆端力却无法唯一确定杆端位移这是因为支座位移条件不已知,可能相差一个刚体位移,即位移的绝对值不同。