最新并联机构运动学能分析与优化动力学
- 格式:doc
- 大小:9.63 MB
- 文档页数:91

并联机器人机构构型创新设计研究汪劲松.关立文.王立平.李铁民.提出一种并联机器人机构构型创新设计新方法——桁架推演法,该方法包括三个主要步骤:根据具体设计需求选择自由度为0的并联机构桁架,并选择适当的推演规则;在一定的约束条件下对桁架进行推演;对推演结果分析、判断和决策,得到新并联机构构型。
最后举例说明了桁架和推演规则等对并联机器人机构构型创新设计具有决定性影响的关键技术问题。
MATLAB 在并联机器人机构仿真中的应用运用Matlab语言给出了平面3RRR并联机构三维仿真实体模型的简单画法及三维实体模型的运动仿真,同时又运用微分法和影响系数两种算法仿真了机构的速度及加速度曲线,最后从仿真图中直接分析了机构的奇异位型点,并说明了文献[7]中运用新的性能分析方法所得出的机构尺寸变化对机构性能影响的结论的实用性。
这充分展现了Matlab的科学计算可视化技术在机器人领域的应用及发展前景。
一种6-6UHU并联机器人的设计和实验研究研制了一种新型结构的大工作空间6 6UHU并联机器人。
通过对虎克铰摆角极限对机器人工作空间的影响研究,在机构设计上解决了杆间干涉和下关节极限问题,简化了干涉检测算法,降低了运动控制算法的复杂性,并且增大了工作空间。
研制出基于DSP的多轴控制器PMAC卡的交流伺服电机控制系统和实验系统,并进行了实验。
给出了不同姿态下该机器人的工作空间分析。
仿真数据和实验结果表明,所研制的新型6 6UHU 并联机器人,结构精巧,工作空间大,动平台的倾斜角达到4 5°;同时具有高刚度、高精度、操作性能好等特点。
干涉防护系统能保证机器人在大工作空间机动运行情况3转动1移动并联机器人机构的结构综合房海蓉.方跃法.胡明.利用螺旋和反螺旋之间的互易关系,分析了给定机构运动自由度与支链约束之间的关系,提出了基于螺旋理论的4自由度并联机器人机构结构综合的一种方法.据此构造了3转动1移动4自由度并联机器人机构的可能支链类型,列举了多种新型对称机构和非对称机构.所提方法对其它少自由度并联机器人机构的结构综合具有普遍意义.并联机构激光加工系统创新设计孙会来.林树忠.李洪来.高铁红.提出了一种新型的两自由度并联平动机构 ,并将其成功的应用到YAG激光加工平台当中。
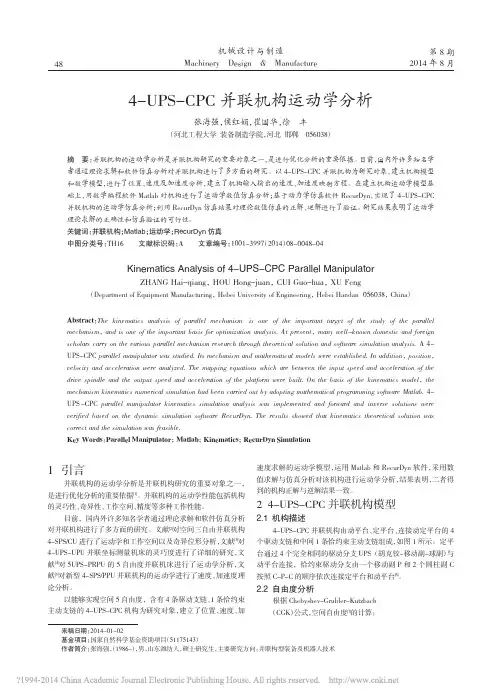
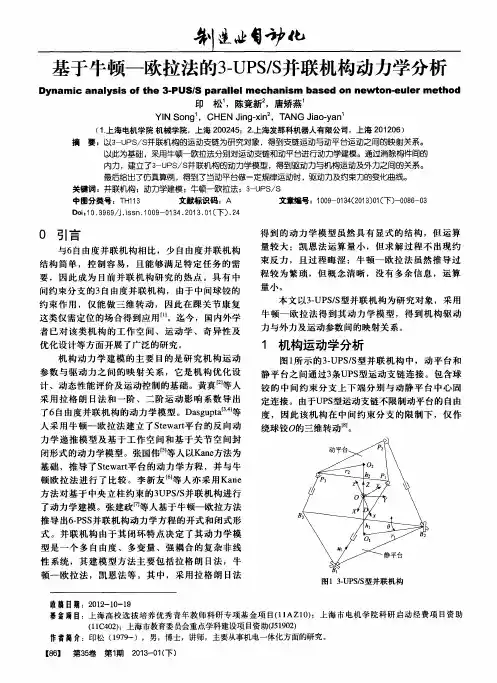
4-UPS-CPC 并联机构运动学分析张海强,侯红娟,崔国华,徐丰(河北工程大学装备制造学院,河北邯郸056038)来稿日期:2014-01-02基金项目:国家自然科学基金资助项目(51175143)作者简介:张海强,(1986-),男,山东潍坊人,硕士研究生,主要研究方向:并联构型装备及机器人技术1引言并联机构的运动学分析是并联机构研究的重要对象之一,是进行优化分析的重要依据[1]。
并联机构的运动学性能包括机构的灵巧性、奇异性、工作空间、精度等多种工作性能。
目前,国内外许多知名学者通过理论求解和软件仿真分析对并联机构进行了多方面的研究。
文献[2]对空间三自由并联机构4-SPS/CU 进行了运动学和工作空间以及奇异位形分析,文献[3]对4-UPS-UPU 并联坐标测量机床的灵巧度进行了详细的研究,文献[4]对5UPS-PRPU 的5自由度并联机床进行了运动学分析,文献[5]对新型4-SPS/PPU 并联机构的运动学进行了速度、加速度理论分析。
以能够实现空间5自由度,含有4条驱动支链、1条恰约束主动支链的4-UPS-CPC 机构为研究对象,建立了位置、速度、加速度求解的运动学模型,运用Matlab 和RecurDyn 软件,采用数值求解与仿真分析对该机构进行运动学分析,结果表明,二者得到的机构正解与逆解结果一致。
24-UPS-CPC 并联机构模型2.1机构描述4-UPS-CPC 并联机构由动平台、定平台、连接动定平台的4个驱动支链和中间1条恰约束主动支链组成,如图1所示。
定平台通过4个完全相同的驱动分支UPS (胡克铰-移动副-球副)与动平台连接,恰约束驱动分支由一个移动副P 和2个圆柱副C 按照C-P-C 的顺序依次连接定平台和动平台[6]。
2.2自由度分析根据Chebyshev-Grubler-Kutzbach (CGK )公式,空间自由度[7]的计算:摘要:并联机构的运动学分析是并联机构研究的重要对象之一,是进行优化分析的重要依据。
![毕业设计(论文)-空间3-rps并联机构的运动分析与仿真[管理资料]](https://uimg.taocdn.com/3ad4a49648d7c1c709a145a5.webp)
毕业设计(论文)题目:空间3-RPS并联机构的运动分析与仿真题目类型:论文型学院:机电工程学院专业:机械工程及自动化年级:级学号:学生姓名:指导教师:日期: 2010-6-11摘要3-PRS并联机构是空间三自由度机构,该机构具有支链数目少、结构对称、驱动器易于布置、承载能力大、易于实现动平台大姿态角运动等特点,目前已在工程中得到成功应用。
本文基于空间机构学理论,对3-RPS并联机构进行了相关的运动学分析。
在对机构结构分析的基础上,对机构的输出位姿参数进行了解耦分析,得到了机构输出参数间的解耦关系式;用解析法推导了机构的位置反解方程;用数值法实现了机构的位置正解;依据驱动副行程、铰链转角、连杆尺寸干涉等限制因素确立约束条件,利用极限边界搜索算法搜索了3-PRS并联机构的工作空间,分析了该机构工作空间的特点,并进行了工作空间体积计算。
最后基于ADAMS软件平台,建立了3-RPS并联机构的三维实体简化模型,对3-RPS并联机构的运动进行了仿真。
本文的研究为3-RPS并联机构的结构设计与应用提供了参考。
关键词:3-PRS并联机构;位置正解;位置反解;工作空间;运动仿真ABSTRACT3-PRS parallel mechanism is a three degrees of freedom of space agencies, the agency has a small number of branched-chain, structural symmetry, the drive is easy layout, carrying capacity, easy to implement a large moving platform attitude angle motion and other characteristics, has been successfully applied in engineering . Based on the theory of space agencies, on the 3-RPS parallel mechanism was related to kinematics analysis. In the analysis of the structure, based on the position and orientation of the body of the output parameters of the decoupling analysis, the decoupling of the output parameters of the relationship; analytic method derived by inverse position equations institutions; achieved by numerical methods body forward position; based driver Vice trip, hinge angle, rod size interference and other constraints set constraints, using the limit boundary search algorithm for searching for the 3-PRS parallel mechanism of the working space, analysis of the sector space characteristics, and a working space of volume. Finally, based on ADAMS software platform, the establishment of the 3-RPS parallel mechanism of three-dimensional solid simplified model of 3-RPS parallel mechanism of the movement is simulated. This study for the 3-RPS parallel mechanism structure provides a reference design and application.Key word: 3-PRS parallel mechanism; forward position;inverse position;workspace ;motion simulation.目录摘要IIABSTRACT III前言VII第1章绪论1课题研究的意义 1并联机构简介 2并联机构的国内外发展现状 3少自由度机构介绍 6少自由度的研究意义 6少自由度并联机构的研究现状 (6)本文主要研究内容7第2章并联机构的组成原理及运动学分析 (9)引言9并联机构自由度分析9并联机构的组成原理10并联机构的研究内容11运动学分析11工作空间分析12本章小结13第3章3-PRS并联机构位置分析14引言14空间3-RPS并联机构14机构组成143-RPS并联平台机构的位姿描述 (15)3-RPS并联平台机构位姿解耦 (19)3-RPS并联平台机构的位姿反解203-RPS并联平台机构的位置正解23本章小结:25第4章3-RPS并联机构的工作空间分析 (26)引言263-RPS并联平台机构的工作空间分析 (26)机构的运动学约束263-RPS并联机构工作空间边界的确定 (28)工作空间分析算例29工作空间体积的计算方法29本章小结30第5章3-RPS并联机构的仿真与应用 313-RPS并联机构的的三维建模31ADAMS软件介绍313-RPS并联机构的建模313-RPS并联机构的运动仿真323-RPS并联机构的应用34本章小结37总结与体会38谢辞39参考文献40前言机构的发明与发展同人类的生产、生活息息相关,它促进着生产力的发展、生产工具的改进和人类生活水平的不断提高。
6-RSS并联机器人动力学与控制研究6-RSS并联机器人动力学与控制研究引言并联机器人是指由多个平行连接构成的机械结构,在工业生产和科学研究中具有广泛的应用。
6-RSS并联机器人是一种典型的并联机器人结构,它由六个平行结构的自由度所组成。
本文将介绍6-RSS并联机器人的动力学与控制研究的最新进展。
一、6-RSS并联机器人的动力学建模动力学建模是研究机器人运动和力学性能的基础,对于实现机器人的精确控制至关重要。
6-RSS并联机器人的动力学建模可以采用拉格朗日方法或牛顿-欧拉方法。
这两种方法都是常用的机器人动力学建模方法,可以描述机器人结构的运动学和动力学特性。
二、6-RSS并联机器人的逆动力学控制逆动力学控制是指根据所期望的机器人末端运动来计算所需要的关节力和力矩,从而实现末端运动的精确控制。
逆动力学控制是关节空间控制的一种重要方法。
对于6-RSS并联机器人,可以通过将逆动力学控制问题转化为代数方程组的求解来实现。
三、6-RSS并联机器人的前向动力学控制前向动力学控制是指根据所给定的关节力和力矩来计算机器人末端的运动,并用于机器人的轨迹规划和控制。
前向动力学控制是一种模型预测控制方法,可以通过数值求解差分方程来实现6-RSS并联机器人的运动控制。
四、6-RSS并联机器人的优化控制优化控制是指根据所给定的性能指标和约束条件来优化机器人的运动控制策略。
在6-RSS并联机器人的运动控制中,可以通过优化控制方法来实现机器人的性能优化和约束条件的满足。
五、6-RSS并联机器人的仿真实验仿真实验是验证动力学与控制策略有效性的一种重要手段。
通过将6-RSS并联机器人的动力学模型与控制算法实现仿真,并与实际机器人运动进行对比,可以评估和改进控制策略的性能。
六、6-RSS并联机器人的应用前景6-RSS并联机器人在工业生产和科学研究中有广泛的应用前景。
它可以用于精确定位和操作、高速加工和装配等任务,对提高生产效率和产品质量具有重要意义。
并联机器人逆运动学求解方法
并联机器人逆运动学求解方法是一种用于确定机器人末端执行器相对于基座坐
标系的位置和姿态的技术。
在并联机器人中,由于存在多个执行机构同时作用于末端执行器,逆运动学求解变得更加复杂。
一种常用的方法是基于解析求解的方法,其中通过建立系统的运动学模型,并
利用数学方法求解方程组以确定机器人的关节角度。
这种方法的优势在于可以精确计算机器人的姿态,并且求解速度较快。
但是,由于并联机器人的动力学模型通常相当复杂,求解方程组可能会变得非常困难。
另一种常用的方法是基于数值求解的方法,如迭代法和递归法。
这些方法通常
通过迭代计算来逼近机器人的关节角度,直到满足指定的位置和姿态要求。
虽然这些方法的求解精度可能较差,但它们更加灵活和可靠,适用于复杂的机器人系统。
此外,还存在一些基于优化算法的求解方法,如遗传算法和粒子群算法。
这些
方法通过优化搜索过程来求解机器人的逆运动学问题。
虽然这些方法的计算量较大,但它们可以有效地应用于复杂的并联机器人系统。
综上所述,并联机器人逆运动学求解方法有一些常用的方法,包括解析求解、
数值求解和优化算法。
根据机器人系统的实际情况和性能要求,选择相应的方法进行逆运动学求解,以精确计算机器人的位置和姿态。
这些方法为并联机器人的运动控制和路径规划提供了重要的理论基础。
基于ADAMS软件的Tricept并联机构动力学仿真分析摘要:随着信息技术的不断发展,人们对应用机械动力学仿真软件的开发越来越关注,本文主要阐述了当前在这种仿真软件adams的基础上建立的一种并联机构的动力学仿真模型的相关内容,供大家参考。
关键词:并联机构;adams;动力学仿真计算机仿真的主要功能之一就是对机械系统的运动学和动力学进行仿真分析,以确定系统及其各个构件在任意时刻的位置、速度和加速度,同时,通过求解代数方程组确定引起系统及其各个构件运动所需的作用力及其反作用力[1]。
在计算机仿真方面已推出的有:美国mdi公司开发的adams、美国eds子公司sdrc公司的i-deas、cadsi的dads(dynamic analysis and design system)及德国航天局的simpack等。
这些软件能够被大家广泛应用主要是因为它们集中了最新的动力学理论成果、数学求解器、各种强大的后处理模块等等,这些都是用来建立机械系统的仿真模型。
这些软件的开发有利于将工作的重点放在模型的设计上,而节省了建立方程和求解等工作中,有效地提高了设计人员的工作效率,进而提高了机械系统仿真的技术含量。
adams(automatic dynamic analysis of mechanical system)全称是机械系统自动动力分析软件,是美国mdi(mechanical dynamics inc.)公司研制开发的一种虚拟样机仿真分析软件。
adams 软件是以多体动力学为核心建立起来的以描述机械系统运动规律、运动特性为目标的仿真软件,可用于预测机械系统的性能、运动范围、碰撞检测、峰值载荷以及计算有限元的输入载荷等。
这种软件已经被世界所认可并被广泛的应用到机械系统仿真分析软件,在这一领域占有试产达到百分之七十,这种虚拟样机的功能更加受到了机器人人员的喜爱。
我国对这一软件也开始重视起来,并已经对这一软件进行细致地分析。
一种四索牵引平动并联机器人的运动分析与控制的开题报告摘要:本文介绍了一种四索牵引平动并联机器人的运动分析与控制方法。
首先,对机器人的运动学参数进行了分析和计算,然后建立了机器人的运动学模型和动力学模型。
接着,采用PD控制和顺序控制算法,设计了机器人运动控制器。
最后,通过仿真实验验证了所提出的控制方法的可靠性和有效性。
关键词:机器人,牵引平动并联机构,运动学,动力学,控制一、研究背景和意义随着工业自动化程度的不断提高,机器人系统在制造业、医疗保健等领域得到了广泛的应用。
其中,平行机构机器人由于其高速度、高精度、高可靠性等重要特性,被广泛应用于工业自动化生产线。
牵引平动并联机构是平行机构机器人的一种典型形式,具有拥有更大的有效载荷和更高的转动速度的优点。
本文旨在研究一种四索牵引平动并联机器人,旨在提出一种新的运动分析和控制方法,以满足高速、高精度和高稳定性的控制需求。
这对于机器人系统的自动化控制和性能优化具有重要意义。
二、相关工作综述目前,有关牵引平动并联机构的研究主要集中在其动力学建模和运动学建模方面。
通常,运动学模型用于机器人的轨迹规划和控制方法的设计,而动力学模型则用于机器人的力学性能分析和优化。
其中,拆分阶段法和拉格朗日动力学是两种常用的动力学建模方法。
对于机器人运动控制方面的研究,PD控制是一种简单且有效的方法,被广泛应用于机器人控制和机器人操作。
此外,一些高级控制算法,如模糊控制和神经网络控制,也被用于机器人控制。
三、研究内容本文旨在设计一个四索牵引平动并联机器人系统的运动分析和控制方法。
具体来说,本文的研究内容包括以下三个方面:1. 机器人运动学分析:该部分将涉及牵引平动并联机器人的电气、机械和运动学参数的分析和计算,建立机器人的运动学模型。
2. 机器人动力学分析:该部分将采用拉格朗日动力学方法建立机器人的动力学模型,并对机器人的动力学性能进行分析。
3. 控制器设计和仿真:该部分将设计一种采用PD控制和顺序控制算法的机器人控制器,并通过仿真实验验证控制器的有效性和可靠性。
并联机构工作空间方法的分析并联机构是指由多个平行连接的机构成为一个整体的机构,并且各个机构的端部都连接在一个移动平台上。
由于并联机构的结构特点和运动特性,使其在实际应用中具有广泛的应用前景。
并联机构的工作空间分析是指研究机构在各个自由度上能够达到的位置的空间范围,通过对工作空间的分析可以发现机构的最优设计方案,也可以作为机构控制算法的基础。
本文通过解析并联机构运动学进行点的追踪和空间区域的计算,具体阐述了并联机构工作空间的方法分析。
1. 并联机构的运动学并联机构是一个复杂的系统,机构中的每个部件都是由一些特定的活动单元构成,并且这些活动单元之间通过连接装置连接在一起。
因此,机构的运动学可以通过各个活动单元的运动来描述。
并联机构的运动学方程可以表示为:F_1(x_1, y_1, z_1) + F_2(x_2, y_2, z_2) + ... + F_n(x_n, y_n, z_n) = 0其中,F_i 表示第 i 个活动单元的旋转和转移运动,(x_i, y_i, z_i) 表示第 i 个活动单元的位移向量。
并联机构的运动学分析需要通过运动学基本参数的计算和方程的求解来完成。
由于并联机构的结构复杂,运动学分析过程中需要使用较为复杂的数学方法,如向量代数、矩阵运算等。
通过运动学分析可以得到并联机构各个自由度的移动范围,进而分析机构的工作空间。
并联机构的工作空间计算方法可以分为两大类,一是几何法,二是向量法。
(1) 几何法几何法是通过几何分析来计算并联机构的工作空间。
将机构各个部件的长度、角度、形状等几何参数代入相应的几何模型中,运用几何关系计算出机构在各自由度上的工作空间。
几何法的优点是计算简单,直接,易于应用。
但是,几何法受制于机构结构和形状的限制,难以解决复杂机构的工作空间分析问题。
另外,对于活动单元的未知参数难以求出,也是几何法的局限之一。
(2) 向量法向量法是指利用向量运算来计算并联机构的工作空间。
Stewart平台电液驱动机构设计摘要Stewart平台是六自由度并联机构的基础平台。
Stewart平台具有诸多优良特性,它在许多领域得到了广泛应用。
六自由度运动平台由于应用场合不同,采用不同的驱动方式。
目前,这种并联机构驱动方式主要包括电机驱动滚珠丝杠驱动方式、阀控液压缸驱动方式、气动人工肌肉驱动方式、电动液压混合执行器驱动方式、压电陶瓷驱动方式、电机驱动滑轮钢索驱动方式等。
阀控液压缸驱动方式的优点是刚度大、抗干扰能力强、功率-重量比和力矩-惯量比大、响应速度快、系统频带宽。
对该平台的驱动机构设计对于深刻理解并联机床和运动模拟器的机理具有重要的意义.本文的核心是研制一个满足实验要求Stewart平台的驱动机构,为了完成此机构的优化设计,本文主要从以下三个方面进行了理论分析。
对Stewart平台的运动学参数进行了理论分析和计算。
重点分析了动平台的位置、速度和加速度和支撑杆的相应参数之间的关系。
对Stewart平台的驱动机构进行了设计和校核,并对液压伺服系统进行了运动学仿真。
利用以上的理论分析和计算过程,本文针对设计目标的参数要求,给出了Stewart平台的驱动机构优化设计方案,并完成了平台的各个组件的设计。
关键词Stewart 平台;运动学;液压伺服系统The hydraulic drive mechanism of the Stewartplatform designAbstractThe Stewart Platform is the base of the six degree-of-freedom parallel mechanism. Stewart platform has many fine characteristics, which in many areas has been widely applied. Six degree-of-freedom campaign platform is used in different applications, so using different-driven approach. At present, the drive way of the parallel institutions contains Motor driven a ball screw-driven approach, valve controlled hydraulic cylinder-driven approach, pneumatic muscle-driven approach, hydraulic hybrid electric actuator-driven approach, piezoelectric ceramic-driven approach, Motor drive pulley cables-driven approach and so on. The advantage of Valve controlled hydraulic cylinder driven approach is high stiffness, Strong anti-interference capability, high Power - weight ratio and Torque –inertia ratio, Fast response, and wide system frequency band. It is critical to the consideration of parallel machine and motion simulation that theoretical research of the Stewart Platform is being carried.The core of the dissertation is to design a drive mechanism for Stewart Platform to meet a certain requirements. Three parts of research are being managed to approach the goal.To analysis and calculations the parameters of theoretical kinematics of the Stewart platform. Lay the emphases on the analysis of Moving platform position, speed acceleration and the relationship of corresponding parameters of the Supporting bar.Design and check the drive mechanism of the Stewart platform. And kinematics simulate for the hydraulic servo system.An optimization of Stewart platform design is put forward based on theabove four parts of work. The mechanical design of every component of the Stewart Platform is accomplished finally.Keywords Stewart Platform, kinematics, hydraulic servo system目录摘要 (I)Abstract (II)第1章绪论 (6)1.1 课题背景 (6)1.2 选题的目的和意义 (6)1.3 仿真用模拟器的组成 (7)1.4 Stewart平台的机械结构组成 (7)1.5 Stewart平台运动系统的关键技术及研究现状 (7)1.5.1 Stewart平台系统的运动特点 (7)1.5.2 Stewart平台运动系统的机构学理论 (8)1.5.3 Stewart平台运动系统的驱动方式 (9)1.5.4 六自由度运动系统的控制策略 (9)1.6 Stewart平台的特点及应用 (10)1.6.1 性能特点 (10)1.6.2 技术特点 (10)1.6.3 检测和控制特点 (11)1.6.4 六自由度并联平台的应用 (12)1.7 论文所要研究的主要内容 (13)第2章六自由度运动平台运动学研究 (14)2.1 引言 (14)2.2 六自由度运动平台结构 (14)2.3 六自由度运动平台运动学 (15)2.3.1 旋转变换矩阵 (15)2.3.2 六自由度运动平台位置和速度反解 (17)2.3.3六自由度运动平台加速度反解 (20)2.4本章小结 (21)第3章Stewart平台的机械机构结构设计 (22)3.1 液压缸的设计 (22)3.1.1 液压缸主要尺寸的确定 (23)3.1.2 液压缸结构设计中的几个问题 (25)3.2 上、下平台虎克铰的设计 (26)3.3 上、下平台台体的设计 (29)3.4 本章小结 (30)第4章CAD和UG简介 (31)4.1参数化设计思想 (31)4.2机械设计方法的发展趋势 (31)4.3 CAD技术发展概况 (32)4.4 UG简介 (35)4.5 运动仿真 (37)4.6 运动仿真的创建 (37)4.7 运动仿真中机构的运动形式 (38)4.8 动画文件的创建 (39)结论 (40)致谢 (41)参考文献 (42)附录 (43)第1章绪论1.1课题背景Stewart平台是通过六个作动器的协调伸缩来实现平台沿x、y、z向的平移和绕x、y、z轴的旋转运动(共6个自由度),以及这些自由度的复合运动。
并联机构工作空间方法的分析并联机构工作空间方法是一种用于设计和分析机械装置工作空间的方法。
通过对工作空间的分析,可以优化并联机构的设计,提高其性能和效率。
本文将对并联机构工作空间方法进行分析,探讨其原理和应用。
一、工作空间的定义工作空间是指机械装置中可用于执行任务的区域。
对于并联机构而言,工作空间是六维度空间中的一个特定区域,其中包括三个平移自由度和三个旋转自由度。
工作空间的大小和形状直接影响了机构的性能和作业范围。
分析工作空间成为了优化机构设计的重要一步。
二、并联机构工作空间方法1. 构建运动学模型并联机构的运动学模型描述了机构中各个链接之间的几何关系和运动规律。
通过构建运动学模型,可以确定机构的工作空间,并对其进行分析。
一般来说,运动学模型包括机构的连杆参数、关节参数以及传动机构等。
通过运动学模型,可以求解机构的工作空间以及相关的性能指标。
2. 确定工作空间边界根据机构的运动学模型,可以确定机构的工作空间边界。
在确定工作空间边界时,需要考虑机构的所有可能运动状态,并对其进行综合分析。
通常情况下,工作空间边界是通过机构的连杆长度、关节角度和传动比等参数来确定的。
确定了工作空间边界之后,可以进一步分析机构的性能和工作范围。
3. 优化工作空间一旦确定了机构的工作空间边界,就可以进行工作空间的优化设计。
优化工作空间的目标是最大化空间利用率,提高机构的性能和效率。
通常情况下,工作空间的优化设计包括几个方面:一是通过改变机构参数来扩大工作空间,例如改变连杆长度、关节角度等。
二是通过改变传动机构来优化机构的运动规律,提高工作空间的利用率。
三是通过改变机构的结构形式来优化工作空间,提高机构的适用范围和灵活性。
1. 工业生产在工业生产领域,并联机构工作空间方法被广泛应用于工程机械、装配线、自动化生产线等领域。
通过分析机构的工作空间,可以优化机构设计,提高生产效率和质量。
例如在汽车生产线上,通过分析机器人的工作空间,可以确定机器人的作业范围,提高装配精度和速度。
并联机构运动学能分析与优化动力学分类号:TH113.2+2 密级:公开U D C:单位代码:10424工程硕士学位论文4-UPS-RPS并联机构运动学性能分析与优化孙先洋申请学位级别:硕士学位领域名称:机械工程指导教师姓名:陈修龙职称:副教授副指导教师姓名:朱苏宁职称:高级工程师山东科技大学二零一三年五月论文题目:4-UPS-RPS并联机构运动学性能分析与优化作者姓名:孙先洋入学时间:2011年9月领域名称:机械工程研究方向:先进设计与制造技术指导教师:陈修龙职称:副教授副指导教师:朱苏宁职称:高级工程师论文提交日期:2013年5月论文答辩日期:2013年6月8日授予学位日期:KINEMATICS PERFORMANCE ANALYSIS AND OPTIMIZATION OF 4-UPS-RPS PMTA Dissertation submitted in fulfillment of the requirements of the degree ofMASTER OF ENGINEERINGfromShandong University of Science and TechnologybySun XianyangSupervisor: Associate Professor Chen XiulongCollege of Mechanical and Electronic EngineeringMay 2013声明本人呈交给山东科技大学的这篇工程硕士学位论文,除了所列参考文献和世所公认的文献外,全部是本人在导师指导下的研究成果。
该论文资料尚没有呈交于其它任何学术机关作鉴定。
硕士生签名:日期:AFFIRMATIONI declare that this dissertation, submitted in fulfillment of the requirements for the award of Master of Engineering in Shandong University of Science and Technology, is wholly my own work unless referenced of acknowledge. The document has not been submitted for qualification at any other academic institute.Signature:Date:摘要本文以一种新型五自由度并联机构—4-UPS-RPS并联机构作为研究对象,对其位置反解、运动学及其性能、结构参数优化设计等方面进行了全面系统的研究。
对4-UPS-RPS并联机构的结构进行了介绍,利用Kutzbach Grubler公式计算出了机构的自由度数;建立了位置反解数学模型,并进行了运动反解分析,完成了刀位数据的坐标转换;对机构进行虚拟运动仿真,用球坐标搜索法确定了该并联机构的工作空间。
推导出了该并联机构的力雅克比矩阵和速度雅克比矩阵,对速度和加速度进行了分析,通过对比Matlab数值计算和Adams虚拟仿真的结果,相互验证了反解数学模型和雅克比矩阵的正确性。
定义了力和力矩灵巧度评定指标、速度加速度评定指标,对平均条件数、最小奇异值和可操作性三个灵巧度评定指标进行了分析,并对以上指标进行了三维可视化仿真分析。
综合以上指标,定义了一个综合评定指标—平方平均灵巧度系数指标,并基于平方平均灵巧度系数指标对并联机构进行了结构优化分析,得到了动平台和定平台铰链点分布角及其所在圆半径的最优参数。
关键词:并联机构,工作空间,雅克比矩阵,运动学分析,结构优化ABSTRACTThis article put a new five-axis 4-UPS-RPS PMT as the research object, and its position reverse solution, kinematics and performance, structural parameters’ optimization are studied comprehensively and systematically.The composition of the 4-UPS-RPS PMT is introduced, and use the Kutzbach Grubler formula to calculate the degree of freedom.Position reverse solution of mathematical model is established, the reverse kinematics and the cutter location data’s conversion are completed. The motion simulation of the PMT is finished. Then analyzing the working space of the PMT with the spherical coordinates search method.The force Jacobian matrix and velocity Jacobian matrix are identified, then analyze the velocity and acceleration. Based on the results of numerical calculation and simulation with the Matlab and Adams, the inverse solution model and the Jacobian matrix are verified. Defining the force and moment dexterity evaluation index, velocity and acceleration dexterity evaluation index. The average condition number, the smallest singular value ,operation dexterity evaluation index are analyzed. All of the dexterity evaluation index above are analyzed visually.Defining a comprehensive index: the square mean dexterity coefficient, and optimize he structural of PMT base on the new index, obtain the optimal parameter of the the joints’distribution position angle and the circle radius on the moving platform and stationary platform.Key words: parallel mechanism, work space, Jacobian matrix, kinematics analysis, structure optimization目录摘要 (3)ABSTRACT (4)目录 (5)Contents (7)第一章绪论 (1)1.1 并联机构的发展概况 (1)1.2 并联机构的理论研究现状 (6)1.3 课题的研究意义 (8)1.4 本文研究的主要内容 (8)第二章4-UPS-RPS并联机构运动学分析 (10)2.1 引言 (10)2.2 4-UPS-RPS并联机构描述 (10)2.3 4-UPS-RPS并联机构反解分析 (12)2.4 工作空间三维表示 (19)2.5 本章小结 (26)第三章4-UPS-RPS并联机构运动学性能分析 (27)3.1 引言 (27)3.2 并联机构的雅克比矩阵 (27)3.3 并联机构灵巧度的评定指标 (38)3.4 并联机构的灵巧度分析 (40)3.5 本章小结 (59)第四章4-UPS-RPS并联机构结构优化设计 (60)4.1 引言 (60)4.2 灵巧度的综合评定指标 (60)4.3 结构优化设计 (64)4.4 本章小结 (70)第五章结论与展望 (71)5.1 结论 (71)5.2 展望 (71)致谢 (72)参考文献 (73)攻读硕士学位期间从事科学研究及发表论文情况 (78)Contents摘要 (3)ABSTRACT (4)目录 (5)Contents (7)第一章绪论 (1)1.1 并联机构的发展概况 (1)1.2 并联机构的理论研究现状 (6)1.3 课题的研究意义 (8)1.4 本文研究的主要内容 (8)第二章4-UPS-RPS并联机构运动学分析 (10)2.1 引言 (10)2.2 4-UPS-RPS并联机构描述 (10)2.3 4-UPS-RPS并联机构反解分析 (12)2.4 工作空间三维表示 (19)2.5 本章小结 (26)第三章4-UPS-RPS并联机构运动学性能分析 (27)3.1 引言 (27)3.2 并联机构的雅克比矩阵 (27)3.3 并联机构灵巧度的评定指标 (38)3.4 并联机构的灵巧度分析 (40)3.5 本章小结 (59)第四章4-UPS-RPS并联机构结构优化设计 (60)4.1 引言 (60)4.2 灵巧度的综合评定指标 (60)4.3 结构优化设计 (64)4.4 本章小结 (70)第五章结论与展望 (71)5.1 结论 (71)5.2 展望 (71)致谢 (72)参考文献 (73)攻读硕士学位期间从事科学研究及发表论文情况 (78)第一章绪论1.1 并联机构的发展概况并联机构(Parallel Mechanism,简称PM)是由动平台和定平台通过两个或两个以上的运动链连接形成的闭环机构[1]。
它具有累计误差小、结构刚性大、承载力较强、动态响应好、末端质量轻等优点,被广泛应用于并联机床、工业机器人、运动模拟器、微操作机器人、传感器等设备中。
关于并联机构的研究理论很早就开始了[2-6]。
最早可以追溯到1897年,Bricard对一些球面并联机构进行了研究。
1931年,J. E. Gwinnett发明了一台基于球面并联机构的娱乐设备;1962年V. E. Gough和Whitehall共同发明了一种六自由度的机器人,该并联机构被用于轮胎检测装置。