3曲柄群模型
- 格式:doc
- 大小:1.10 MB
- 文档页数:40
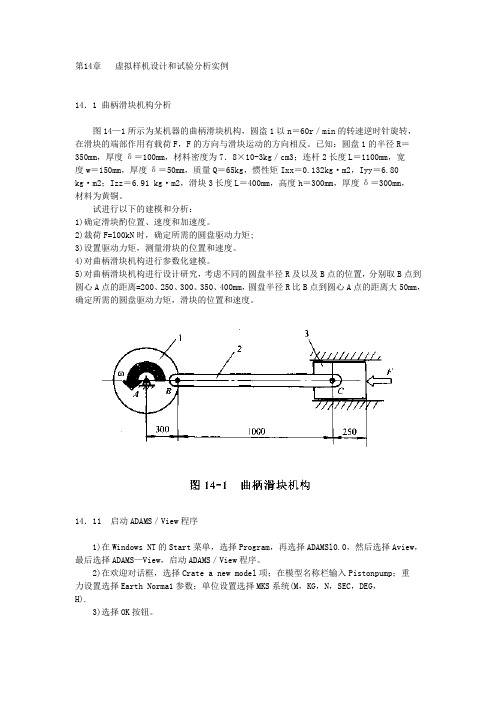
第14章虚拟样机设计和试验分析实例14.1 曲柄滑块机构分析图14—1所示为某机器的曲柄滑块机构,圆盗1以n=60r/min的转速逆时针旋转,在滑块的端部作用有载荷F,F的方向与滑块运动的方向相反。
已知:圆盘1的半径R=350mm,厚度δ=100mm,材料密度为7.8×10-3kg/cm3;连杆2长度L=1100mm,宽度w=150mm,厚度δ=50mm,质量Q=65kg,惯性矩Ixx=0.132kg·m2,Iyy=6.80 kg·m2;Izz=6.91 kg·m2,滑块3长度L=400mm,高度h=300mm,厚度δ=300mm,材料为黄铜。
试进行以下的建模和分析:1)确定滑块酌位置、速度和加速度。
2)裁荷F=l00kN时,确定所需的圆盘驱动力矩;3)设置驱动力矩,测量滑块的位置和速度。
4)对曲柄滑块机构进行参数化建模。
5)对曲柄滑块机构进行设计研究,考虑不同的圆盘半径R及以及B点的位置,分别取B点到圆心A点的距离=200、250、300、350、400mm,圆盘半径R比B点到圆心A点的距离大50mm,确定所需的圆盘驱动力矩,滑块的位置和速度。
14.11启动ADAMS/View程序1)在Windows NT的Start菜单,选择Program,再选择ADAMSl0.0,然后选择Aview,最后选择ADAMS—View,启动ADAMS/View程序。
2)在欢迎对话框,选择Crate a new model项;在模型名称栏输入Pistonpump;重力设置选择Earth Norma1参数;单位设置选择MKS系统(M,KG,N,SEC,DEG,H).3)选择OK按钮。
14.12检查和设置建模基本环境(1)检查默认单位系统在Settings菜单选择Units命令,显示单位设置对话框当前的设置应该为MKS系统(M,KG,N,SEC,DEG , H).(2)设置工作栅格1)在settings菜单,选择working Grid命令.显示设置工作栅格对话框。

(第8题)温州市2023年初中学业水平第三次适应性考试 数学试题卷 2023.06卷 Ⅰ一、 选择题(本题有10小题,每小题4分,共40分. 每小题只有一个选项是正确的,不选、多选、错选,均不给分)临近中考,为了回归基础知识的复习,九年(8)班数学项目化学习小组开展了基础知识梳理会,请你帮助他们完成1-4小题.1. 有理数的运算:计算7+(−3)的结果是(▲)A. −10B. −4C. 4D. 102. 实数的分类:小赫制作了如图所示的实数分类导图,下列选项能按序正确填入两个空格的是(▲)A. −2;−πB. 9;−√17C. −9;−√83D. 2;−5 3. 科学记数法:据估计,2023年温州市初中学业水平考试共计有94600位考生参加. 其中数据94600用科学记数法表示为(▲)A. 94.6×103B. 9.46×103C. 9.46×104D. 0.946×105 4. 幂的运算:计算(−aa 2)4÷aa 4的结果是(▲)A.−aa 4B.−aa 2C.aa 4D.aa 2 中考结束后,九年(8)班全体同学和老师们举行了户外研学活动,请你据此完成5-8小题.5. 选择活动项目:出发前,班委对全体成员的活动意向进行了调查(每人仅可选择一项),得到的统计图如图所示. 若九年(8)班共有学生45人,老师5人. 则选择野营的比观海的多(▲)A. 8人B. 14人C. 16人D. 12人 6. 确认小组成员:为了活动方便,植树小组打算进行两两随机组队. 若小哲和小涵都选择了植树,则他们被分到同一组的概率是(▲)A. 12B.13 C. 14 D. 15 7. 设计植树方案:在种植树木时,负责人员要求株距(相邻两树间的水平距离)为4mm . 如图,若在坡比为1:2的山坡上种树,那么相邻两树间的坡面距离为(▲)A. 2√5mmB. 4mmC. 8mmD. 4√5mm 8. 植树准备工作:小哲匀速地向一个容器装水,直至装满容器. 若在接水的过程中,水面高度ℎ随时间tt 的变化规律如图所示,则这个容器的形状可能是下列图中的(▲)A.B. C. D.(第2题) (第5-6题) (第7题)9. 已知二次函数yy =49(x −1)2−1上的两点PP (xx 1,yy 1),QQ (xx 2,yy 2)满足xx 1=3+xx 2,则下列结论中正确的是(▲)A. 若xx 1<−12,则yy 1>yy 2>−1B. 若−12<xx 1<1,则yy 2>0>yy 1C. 若xx 1<−12,则yy 1>0>yy 2D. 若−12<xx 1<1,则yy 2>yy 1>0 10. 如图,以RRtt △ABC 的三边为边分别向外作正方形. 连结EEEE 交BBBB 于点JJ ,作JJ JJ //BBAA 交EE II 于点JJ ,连结EE AA 交JJ JJ 于点LL . 若SS AAAAAAAA :SS AAAAAAAA =9:16,则JJJJ JJLL 的值为(▲)A. √62B. 2825C. 76D. √2 卷 Ⅱ二、 填空题(本题有6小题,每小题5分,共30分)11. 分解因式:4xx 2−16= ▲ . 12. 若关于xx 的方程(xx −mm )2−2=nn 有两个不相等的实数根,则nn 的取值范围是 ▲ . 13. 已知圆锥的底面半径为2ccmm ,表面积为14ππccmm 2,则该圆锥的母线长为 ▲ ccmm .14. 如图,已知BBAA 平分∠BBBBBB ,AAEE ⊥BBBB 于点EE ,AACC ⊥BBBB 的延长线于点CC . 且BBAA =AABB =10, BBBB =21,BBBB =9. 则BBAA 的长为 ▲ . 15. 如图,过原点的直线与反比例函数yy =kk xx (kk >0)的图象交于BB ,BB 两点,点BB 在第一象限,点AA 在xx 轴正半轴上,连结BBAA 交反比例函数图象于点BB . BBEE 为∠BBBBAA 的平分线,过点BB 作BBEE 的垂线,垂足为EE ,连结BBEE . 若BBAA =3BBAA ,△BBBBEE 的面积为12,则kk 的值为 ▲ . 16. 如图1是机械设计上的曲柄摇杆机构模型图,该机械可以抽象成如图2的数学模型,曲柄BBBB 绕点BB 旋转,带动摇杆BBAA 在BBAA 1和BBAA 2间反复摆动.已知BBBB =4ccmm ,BBBB =8ccmm ,BBAA =12ccmm .在旋转过程中,设点BB 与点AA 的距离为xx ccmm ,则xx 的最小值为 ▲ . 若BBEE ⊥AA 1AA 2于点EE ,AA 1AA 2//BBBB ,则sin ∠AA 1BBEE = ▲ .三、 解答题(本题有8小题,共80分,解答需写出必要的文字说明、演算步骤或证明过程)17. (本题10分)(1)计算:|−5|−3tt aa nn 30°−(1+ππ)0+(−2)−2.(2)解不等式组:�4xx −2⩾3(xx −1)xx −5+1>−3 . (第14题)(第10题) (第15题) (第16题)(第20题) 18. (本题8分)如图是由小正方形组成的7×8网格,每个小正方形的顶点叫做格点,矩形BBBBAABB 的四个顶点都是格点. 请仅用无刻度的直尺在给定网格中完成作图,作图痕迹用虚线表示.(1)请在图1中的边BBBB 上画点EE ,使BBEE =2BBEE .(2)请在图2中的边BBBB 上画点II ,使BBII =BBII .注:图1、图2均在答题卡中.19. (本题8分)2023年温州市初中毕业生体育学业水平考试已经结束,九年(8)班30名学生的考试成绩统计如下. 按照规定,成绩在39分及以上的属于优秀. 成绩(分)40 39 38 37 36 35 34 人数(人) 10 5 7 5 2 0 1(1)求九年(8)班学生体育学业水平考试成绩的平均数、中位数和优秀率.(2)九年(7)班30名学生的本次考试成绩的平均数为38分,中位数为38.5分,优秀率为60%,请结合上述统计量进行比较分析,从不同角度衡量两个班级的体育学业模拟考试成绩的水平.20. (本题8分)如图所示,在△BBBBAA 中,BBBB 是边BBAA 上的高线,AAEE 是边BBBB 上的中线,BBDD ⊥AAEE 于点DD ,AABB =BBEE . (1)证明:AADD =EEDD .(2)若BBBB =10,BBBB =6,求AAEE 的长.21. (本题10分)图1是安装在倾斜屋顶上的热水器,图2是热水器的侧面示意图. 已知屋面BBEE 的倾斜角∠EEBBBB 为22°,真空管BBBB 与水平线BBBB 的夹角∠BBBBBB 为37°,安装热水器的铁架竖直管AAEE 的长度为0.6米,水平横管BBAA 的长度0.25米.(1)求水平横管BBAA 到水平线BBBB 的距离.(2)求真空管BBBB 与屋面BBEE 的长度差.(参考数据:ssss nn 37°≈35,ccccss 37°≈45,ttaann 37°≈34,ssss nn 22°≈38,ccccss 22°≈1516,ttaann 22°≈25) 22. (本题10分)如图,在菱形BBBBAABB 中,点EE ,CC 在对角线BBBB 上(点EE 在点CC 左侧),连结BBEE ,BBCC ,AACC ,BBEE //AACC ,连结并延长AAEE 交BBBB 于点II . (1)证明:四边形BBEEAACC 是菱形.(2)若AAII ⊥BBBB ,2BBEE =3EECC ,菱形BBEEAACC 的面积为16. 求菱形BBBBAABB 的周长.(第21题)(第18题)(第22题)(图1). 24. (本题14分)如图,在△ABC 中,BBBB =BBAA . 以BBAA 为直径的半圆交BBAA 于点BB ,点EE 为⌒CD 上一动点,连结AAEE 、EEBB 、BBEE ,已知tt aa nn ∠DEA =34. 点CC 为AAEE 延长线上一点,且AAEE =EECC ,在线段BBAA 上取点DD ,使得BBDD =DDCC ,连结CCDD 、DDBB .(1)求AAAA AAAA 的值. (2)求证:∠GAE =12∠BAC . (3)若BBAA =10,连结EEDD .①若△EGA 是以EEDD 为腰的等腰三角形,求所有符合条件的EEAA 的长.②将线段AACC 绕点AA 逆时针旋转90°至AAII ,若DD 、BB 、II 在同一条直线上,则SS △BGA SS △CAH = ▲ .(图2)(第24题)。
铰链四杆机构的基本性质一、教材分析1、教学对象分析学生在前面章节中已经学习了典型的机械传动知识,对机械基础课程有一定的认识,具备基本的分析机构特性的能力。
技工学校的学生由于知识基础较差,对知识的理解、转移和迁徙的能力还不够强,我们的培养目标是技能的培养,学生重操作技能轻理论学习,导致对理论学习的兴趣不够浓厚。
2、教学内容“铰链四杆机构的基本性质”是全国中等职业技术学校机械类专业通用教材《机械基础》第五章第二节的内容。
3、教学内容的分析处理《机械基础》课程主要内容包括常用机械传动、常用机构、轴系零件及液压传动。
第五章“平面四杆机构”是学生在学完机械传动后学习的第一中常用机构,而铰链四杆机构在实际生产和生活中应用广泛,它的学习将对今后的生产实践与创新产生很大影响。
本次课学习的“铰链四杆机构的基本性质”是本章的重点内容,既是第一节内容的归纳总结,又是后续章节的基础,是培养学生推理分析问题、解决实际问题的工作能力过程。
机械基础这门课的教学要求之一是:能作简单的有关设计计算和创新。
这一节的内容在教材中起承上启下的作用,其教学的成败,将对后续内容的掌握起到决定性作用。
为了激发学生的学习热情,提高学生注意力集中程度,充分发挥学生的主动性和创新意识,我的做法是:1)通过上一次课的学习,让学生自己动手制作一个铰链四杆机构模型,增加学生的学习兴趣和动手能力;2)利用课件形式增加动画欣赏,起到丰富教学内容、理论联系实际、加强专业知识素养,使学生明确学习目的,从而使学习兴趣和主动性增强。
3)针对学生基础知识薄弱,理解能力不够强的特点,对“曲柄存在条件”、“急回特性”、“死点位置”进行动画演示和公式推导,增加对应的例题讲解和相应的课堂学习。
4、教学目标知识目标:1.理解铰链四杆机构的基本特性;2.能够利用曲柄存在条件判断机构类型;3.掌握急回特性系数、急回特性、死点位置等概念。
能力目标:1.知识的获取、消化、吸收的能力;2.分析、判断、解决问题的能力;3.动手能力,创新能力。

机械原理课程机构设计实验报告题目:曲柄滑块机构的运动分析及应用小组成员与学号:泽陆(11071182)柯宇 (11071177)熊宇飞(11071174)保开 (11071183)班级: 1107172013年6月10日摘要 (3)曲柄滑块机构简介 (4)曲柄滑块机构定义 (4)曲柄滑块机构的特性及应用 (4)曲柄滑块机构的分类 (8)偏心轮机构简介 (9)曲柄滑块的动力学特性 (10)曲柄滑块的运动学特性 (11)曲柄滑块机构运行中的振动与平衡 (14)参考文献 (15)组员分工 (15)摘要本文着重介绍了曲柄滑块机构的结构,分类,用途,并进行了曲柄滑块机构的动力学和运动学分析,曲柄滑块机构的运动学特性分析,得出了机构压力表达式,曲柄滑块机构的运动特性分析,得出了滑块的位移、速度和加速度的运动表达式。
最后,对曲柄滑块机构运动中振动、平衡稳定性等进行了总结。
关键字:曲柄滑块动力与运动分析振动与平稳性ABSTRACTThe paper describes the composition of planar linkage, focusing on the structure, classification, use of a slider-crank mechanism and making the dynamic and kinematic analysis, kinematics characteristics of the crank slider mechanism analysis for a slider-crank mechanism, on one hand , we obtain the drive pressure of the slider-crank mechanism ,on the other hand,we obtain the expression of displacement, velocity and acceleration of movement. Finally, the movement of the vibration and balance stability of the crank slider mechanism are summarized.曲柄滑块机构简介曲柄滑块机构定义曲柄滑块机构是铰链四杆机构的演化形式,由若干刚性构件用低副(回转副、移动副)联接而成的一种机构。

公开课教案教学环节教学内容师生活动教学方法设计意图课前任务任务1 利用学习通完成微课《铰链四杆机构组成、类型及应用》学习任务2 完成章节小测验,查看学习成效任务 3 将自主学习过程中存在的疑问在讨论区留言,课上解决【教师】利用“超星”发布课前学习任务,收集学生任务完成数据【学生】完成课前学习任务,提出学习过程的疑问培养学生自主学习的能力一、知识回顾(5分钟)1.动手做一做,每位同学制作一组铰链四杆机构2.铰链四杆机构的组成?3.铰链四杆机构的基本类型?【教师】展示学生超星平台学习成果【学生】动手完成一个铰链四杆机构制作,并结合课前学习内容回答教师问题让学生动手制作,可以活跃课堂氛围,同时对课前自学内容进行简短的总结,为新课教学最好铺垫。
二、创设情境(2分钟)情境:识别生活中存在的铰链四杆机构送料机构——曲柄摇杆机构有一个曲柄车轮转向机构——双摇杆机构无曲柄惯性筛——双曲柄机构有两个曲柄【教师】提供生活中铰链四杆机构应用实例【学生】观察四杆机构运动过程,投票决定四杆机构类型。
创设情境多媒体展示启发式教学自主探究创设情境,引导学生发现生活中隐藏的铰链四杆机构,让学生学会观察和思考,提起学生学习兴趣,激发学习欲望。
启发学生的思维,让学生学会发现,学会探索。
三、新课讲授(30分钟)平面连杆机构的基本特性——铰链四杆机构曲柄存在的条件提出疑问:有曲柄&无曲柄?一、新知:铰链四杆机构曲柄存在的条件曲柄存在条件之一:在铰链四杆机构其中三根杆长不变,观察第四根杆长变化对铰链四杆机构形式的影响结论:曲柄存在与杆长有关最短杆与最长杆和VS 其余两杆和有无曲柄AB DA CD BC65 + 160 <120 + 140 有65 + 160 >120 + 90 无65 + 160 =120 + 105 有曲柄存在条件一:最短杆与最长杆的长度之和小于或等于其他两杆长度之和。
同学制作的铰链四杆机构是否满足条件最短杆长+最长杆长≤其余两杆长度和曲柄存在条件之二:在满足曲柄存在一的前提下,让学生尝试取不同的构件为机架,观察铰链四杆机构类型构件2做机架为曲柄摇杆机构构件1做机架为双曲柄机构构件3做机架为双摇杆机构构件4做机架为曲柄摇杆机构【教师】引导学生提出铰链四杆机构中有无曲柄存在的疑问【教师】演示铰链四杆机构中杆长变化过程【学生】观察思考。
基于ABAQUS的偏置曲柄滑块机构运动仿真分析
王剑宏;肖洁
【期刊名称】《农业装备技术》
【年(卷),期】2024(50)2
【摘要】曲柄滑块机构广泛应用于往复活塞式发动机、压缩机、冲床等机构中,曲柄滑块机构以曲柄为主动件,滑块为从动件,将曲柄的转动转换为滑块的往复运动。
为了研究偏心距对曲柄滑块机构的影响,通过在三维设计软件UG建立曲柄滑块机构UG模型,并使用ABAQUS软件对不同偏心距的曲柄滑块机构进行动力学仿真分析,仿真结果分析了曲柄滑块机构的位移曲线以及应力变化曲线,发现偏置曲柄滑块机构具有急回特性,因此在需要较稳定的场合,尽可能不要使用偏置曲柄滑块机构,应使用对心曲柄滑块机构,合适的偏心距可以降低连杆连接处的应力,因此在低速重载的场合应该使用小偏心距的偏置曲柄滑块机构。
【总页数】3页(P47-48)
【作者】王剑宏;肖洁
【作者单位】贵州省毕节市农业机械研究所
【正文语种】中文
【中图分类】TG3
【相关文献】
1.基于MATLAB_Simulink的偏置式曲柄滑块机构运动学仿真
2.基于Simmechanics的偏置曲柄滑块机构运动学建模及仿真研究
3.基于SolidWorks
偏置曲柄滑块机构运动仿真分析4.基于ADAMS的偏置曲柄滑块机构的运动学及动力学仿真研究5.基于Matlab的偏置曲柄滑块机构的运动特性仿真研究
因版权原因,仅展示原文概要,查看原文内容请购买。
曲柄摇杆机构名词解释1. 什么是曲柄摇杆机构?曲柄摇杆机构是一种常见的机械传动装置,用于将旋转运动转换为直线运动或者将直线运动转换为旋转运动。
它由曲柄、摇杆和连杆组成。
2. 曲柄曲柄是曲线形状的轴,它通常被安装在一个旋转轴上。
曲柄的一端与旋转轴连接,另一端则通过连杆与摇杆相连。
当旋转轴旋转时,曲柄就会带动摇杆和连杆做相应的运动。
3. 摇杆摇杆是一个具有固定中心点的刚性杆件,它可以绕着中心点进行旋转。
摇杆的一端与连杆相连,另一端则可以用来传递力量或者控制其他装置。
通过改变中心点和长度,可以调整摇杆的运动特性。
4. 连杆连杆是连接曲柄与摇杆的关键部件,它通常是一个刚性的直线导向元件。
连杆有时也被称为“连接杆”或“连杆杆件”。
它的作用是将曲柄的旋转运动转换为摇杆的直线运动,或者将摇杆的直线运动转换为曲柄的旋转运动。
5. 曲柄摇杆机构的工作原理曲柄摇杆机构的工作原理基于连杆机构和曲线运动的特性。
当曲柄绕旋转轴旋转时,连杆会带动摇杆做直线运动。
具体来说,当曲柄处于水平位置时,连杆与摇杆呈直线状,并且摇杆处于最低点。
随着曲柄的旋转,连杆开始向上运动,同时带动摇杆沿着一个特定的轨迹做上下振动。
当曲柄继续旋转至垂直位置时,连杆达到最高点,并且摇杆处于最高点。
在曲柄继续旋转过程中,连杆再次向下移动并带动摇杆做相应的振动。
通过调整连杆和摇杆的长度以及中心点位置,可以改变曲柄摇杆机构的输出特性,如振幅、周期等。
6. 曲柄摇杆机构的应用曲柄摇杆机构广泛应用于各种机械装置中,包括发动机、泵、压缩机、内燃机等。
它们可以用于转换旋转运动和直线运动之间的能量和力量传递。
在发动机中,曲柄摇杆机构被用来将活塞的往复运动转换为曲轴的旋转运动,从而驱动汽车或者其他设备。
在泵和压缩机中,曲柄摇杆机构被用来增加或减少压力,并实现液体或气体的输送。
曲柄摇杆机构还常见于一些玩具、模型和工艺品中,用于制造有趣的动态效果。
7. 曲柄摇杆机构的优点和局限性优点:•简单可靠:曲柄摇杆机构由少量的部件组成,结构简单且可靠性高。
I 曲柄群驱动机构动力学建模与分析 摘 要 曲柄群驱动机构是一种近期在国内出现的新型传动机构,它由一个主动曲柄转动来带动其他若干从动曲柄同步转动,适用于驱动多个平行轴同步转动、传递扭矩不太大的场合,现已在部分烟草机械、专用钻床等轻工机械中得到使用。曲柄群驱动机构具有结构简单、价格低廉的优点,但现在仍属于初步开发应用阶段,缺乏对它的理论研究。 由于此机构是由多个平行四边形机构并联而成,本文就以含间隙的平行四边形机构为例,此机构中有两个曲柄,确定其中一曲柄为主动曲柄,研究分析其中各曲柄、连杆和间隙的运动、受力情况,通过联立约束法列出其运动学、动力学方程成,表达机构各组件位移、速度、加速度、受力、转矩等的关系,并组合成一组线性方程,建立起数学模型。 之后利用MATLAB软件中的Simulink工具箱建立出它的仿真模型,设置各项参数、输入仿真时间后运行仿真,经过多次调试得到结果,即各曲柄的转角、角速度及角加速度,和各杆受力情况的变化规律曲线。
关键词:曲柄群驱动机构,动力学建模与分析,MATLAB/Simulink II Dynamics Modeling and Analysis of the Crank-group Driving Mechanism
ABSTRACT The crank-group driving mechanism is a new type of transmission mechanism appears in China recently, which consists of one driving crank and many other driven cranks. It is suitable for driving a plurality of parallel axis synchronous rotation, or which torque is not too large. It has been used in some tobacco machine, special machine and other light industrial machines. The crank-group driving mechanism has the advantages of simple structure, low price, but still belongs to the initial development stage, lack of theoretical research. Because this mechanism is composed of some parallelogram mechanism, this paper uses the parallelogram mechanism with clearance as an example.There are two cranks in this mechanism, determine one of them to active crank. Then analysis and clearance of the movement, stress conditions. Use the simultaneous constraint method to lists the kinematics, dynamics equation,the relationship between the expression of each component displacement,speed, acceleration, force, torque, and combined into a set of linear equations, to build the mathematical model. At last,build the simulation model in MATLAB software Simulink toolbox, set the parameters, run the simulation input simulation time. After several debugging results, we can get the driven crank’s angle, angle velocity , angle acceleration and the rod stress changing curve.
KEYWORDS: Crank-group driving mechanism, Dynamic modeling and analysis, MATLAB/Simulink III 目 录 摘要 …………………………………………………………………………………………Ⅰ ABSTRACT ……………………………………………………………………………………Ⅱ 1绪论 ………………………………………………………………………………………1 1.1课题背景及意义……………………………………………………………………1 1.1.1 课题背景 ………………………………………………………………… 1 1.1.2 课题意义……………………………………………………………………1 1.2国内外相关问题研究现状…………………………………………………………2 1.3课题主要研究问题及目标…………………………………………………………3 1.3.1 主要研究问题和难点………………………………………………………3 1.3.2 解决方法和目标……………………………………………………………3 2 曲柄群驱动机构的动力学建模……………………………………………………………4 2.1动力学建模概念……………………………………………………………………4 2.1.1 机械动力学…………………………………………………………………4 2.1.2 系统的模型…………………………………………………………………4 2.1.3 动力学建模…………………………………………………………………5 2.2含间隙机构研究方法………………………………………………………………5 2.3动力学建模…………………………………………………………………………6 2.3.1动力学建模方法……………………………………………………………6 2.3.2 建模步骤……………………………………………………………………7 3 曲柄群驱动机构的动力学仿真模型…………………………………………………… 11 3.1 仿真概述………………………………………………………………………… 11 3.2 Simulink仿真建模……………………………………………………………… 11 3.2.1 MATLAB/Simulink简介……………………………………………………11 3.2.2 Simulink仿真…………………………………………………………… 13 3.2.3 含间隙平行四边形机构的Simulink仿真建模…………………………14 4 曲柄群驱动机构的动力学仿真结果分析……………………………………………… 26 4.1 运动分析………………………………………………………………………… 26 4.1.1 位移分析………………………………………………………………… 26 4.1.2 速度分析………………………………………………………………… 27 4.1.3 加速度分析………………………………………………………………28 4.2 受力分析…………………………………………………………………………29 4.3 小结………………………………………………………………………………33 IV 5 总结……………………………………………………………………………………… 34 致谢………………………………………………………………………………………… 35 参考文献…………………………………………………………………………………… 36 曲柄群驱动机构动力学建模与分析 1 1 绪论 1.1 课题背景及意义 1.1.1 课题背景
曲柄是一种与机架用转动副相连,并且能够绕该转动副轴线整圈旋转的构件。曲柄在机械机构中的使用相当广泛,尤其常出现在铰链四杆机构中。如存在一个曲柄和一个摇杆的曲柄摇杆机构,其中曲柄作为主动件等速转动,摇杆作为从动件作变速往返摆动,连杆则作平面复合运动,也有的用摇杆作为主动构件,摇杆的往复摆动转换成曲柄的转动。再比如具有一个曲柄和一个滑块的曲柄滑块机构,它通过曲柄和滑块来实现转动和移动相互转换,也称作曲柄连杆机构。如果在铰链四杆机构中,两个连杆架都是曲柄,那么可称此机构为双曲柄机构,若两对边的长度相等,则可称它为平行四边形机构,机构的两个曲柄都能够实现整周转动,此时,再把许多平行四边形机构并联,就可出现一种由一个主动曲柄转动带动其他若干从动曲柄同步转动而实现传动目的的机构,叫做曲柄群驱动机构。 曲柄群驱动机构是一种近期在国内出现的新型传动机构。传统传动机构包括齿轮传动、链传动、带传动、蜗轮蜗杆传动等传动方式现今都被广泛运用在各个机械系统中,但它们都有耗费功率大、结构复杂、传动噪声大、消耗大等缺点,有些为避免空间干涉而设计的过大的结构会对机械的摆放和运输造成不便,并会使机器显得繁冗。而曲柄群驱动机构的出现,从一定程度上解决了这些问题,它适用于驱动多个平行轴同步转动、传递扭矩不太大的场合,现已在部分烟草机械、专用钻床等轻工机械中得到使用,它相对传统传动机构的优越性在于充分利用了曲柄传动与连杆机构的优点,使其在实际机械中能发挥出结构简单、价格低廉的优势。
图1-1 曲柄群驱动机构的一般形式 1.1.2 课题意义 我国是制造业大国,制造业作为我国国民经济的支柱产业,是我国经济增长的主导部门和经济转型的基础,是经济社会发展的重要依托。目前看来,我国的制造业是发展较快、国际竞争力较强的产业门类,这大部分是多亏了对外开放的国策,对外商开放投