第4章 形状和位置公差(答案)
- 格式:doc
- 大小:386.00 KB
- 文档页数:9

公差与配合习题及参考答案第一章绪论1-1.什么叫互换性?为什么说互换性已成为现代机械制造业中一个普遍遵守原则?列举互换性应用实例。
(至少三个)。
答:(1)互换性是指机器零件(或部件)相互之间可以代换且能保证使用要求的一种特性。
(2)因为互换性对保证产品质量,提高生产率和增加经济效益具有重要意义,所以互换性已成为现代机械制造业中一个普遍遵守的原则。
(3)列举应用实例如下:a、自行车的螺钉掉了,买一个相同规格的螺钉装上后就能照常使用。
b、手机的显示屏坏了,买一个相同型号的显示屏装上后就能正常使用。
c、缝纫机的传动带失效了,买一个相同型号的传动带换上后就能照常使用。
d、灯泡坏了,买一个相同的灯泡换上即可。
1-2 按互换程度来分,互换性可分为哪两类?它们有何区别?各适用于什么场合?答:(1)按互换的程来分,互换性可以完全互换和不完全互换。
(2)其区别是:a、完全互换是一批零件或部件在装配时不需分组、挑选、调整和修配,装配后即能满足预定要求。
而不完全互换是零件加工好后,通过测量将零件按实际尺寸的大小分为若干组,仅同一组内零件有互换性,组与组之间不能互换。
b、当装配精度要求较高时,采用完全互换将使零件制造精度要求提高,加工困难,成本增高;而采用不完全互换,可适当降低零件的制造精度,使之便于加工,成本降低。
(3)适用场合:一般来说,使用要求与制造水平,经济效益没有矛盾时,可采用完全互换;反之,采用不完全互换。
1-3.什么叫公差、检测和标准化?它们与互换性有何关系?答:(1)公差是零件几何参数误差的允许范围。
(2)检测是兼有测量和检验两种特性的一个综合鉴别过程。
(3)标准化是反映制定、贯彻标准的全过程。
(4)公差与检测是实现互换性的手段和条件,标准化是实现互换性的前提。
1-4.按标准颁布的级别来分,我国的标准有哪几种?答:按标准颁布的级别来分,我国标准分为国家标准、行业标准、地方标准和企业标准。
1-5.什么叫优先数系和优先数?答:(1)优先数系是一种无量纲的分级数值,它是十进制等比数列,适用于各种量值的分级。
第四章形状和位置公差及检测(一)一、判断题1.有位置公差要求的被测要素都不是单一要素。
()2.在位置公差中基准只有一个。
()3.给定相互垂直的两个方向的垂直度要求时,公差带形状是一个四棱柱。
()4.定向公差带具有确定的位置,还具有综合控制被测要素的方向和形状的职能。
()5.三基面体系中的三个平面相互是垂直的。
()6.径向圆跳动中,在测量时测量仪器可以在圆柱面上来回移动。
()7.径向全跳动与圆柱度的公差带形状一样,故含义也一样。
()8.基准选择时,主要考虑基准统一原则,再兼顾设计要求及装配要求。
()二、解答题1.习题图4-1所示销轴的三种形位公差标注,它们的公差带有何不同?图4—1 销轴2.习题图4-2所示零件标注的位置公差不同,它们所要控制的位置误差区别何在?试加以分析说明。
图4—2 零件图3.在底板的边角上有一孔,要求位置度公差为Φ0.1mm,习题图4-3所示的四种标注方法,哪种标注方法正确?为什么另一些标注方法不正确?a)b)c)d)图4—3 零件图4.习题图4-4所示的零件,标注了两种不同的位置公差,它们的要求有何不同?a) b)图4—4 零件图第四章形状和位置公差及检测(二)一、判断题1.采用零形位公差,指在任何情况下被测要素的形位公差总是零。
()2.最大实体要求应用于被测要素又应用于基准要素时,公差值只能从被测要素或基准要素一处得到补偿。
()3.在满足功能要求的前提下,形位公差项目的选择应尽量选测量简单的项目。
()4.在保证关联作用尺寸不超越最大实体尺寸的场合下,最好在选择公差原则时选最大实体要求。
()5.国家标准对位置度公差值直接规定了具体等级和数值。
()6.国家标准对形位公差的未注公差值均未规定公差等级和数值。
()7.用与理想要素比较原则测量形位公差时,理想要素要绝对精确,不能用模拟法获得。
()8.用两点法测量圆度误差时,只能得到近似的测量结果。
()二、解答题1.试按习题图4-5的形位公差要求填写下表图4—5零件图2.某种零件表面的平面度公差为0.02mm,经实测,实际表面上的九点对测量基准的读数(单位为μm),如习题图4-6所示,问该表面的平面度误差是否合格?图4—6 零件平面度测得数据3.习题图4-7中的四种标注方法,分析说明它们所表示的要求有何不同(包括采用的形位公差原则,理想边界尺寸、允许的垂直度误差等)?a)b)c)d)图4—7 公差的标注。
《互换性与技术测量》习题答案,如某些题存在错误,请与万书亭联系(,),欢迎批评指正第1章绪论1-1.互换性在机器制造业中有什么作用和优越性互换性原则已经成为提高生产水平和促进技术进步强有力的手段之一,主要体现在:1)对机械设计方面。
设计过程中,设计人员应尽量采用具有互换性的标准化零部件,这样将简化设计量,大大缩短设计周期,同时有利于实现计算机辅助设计。
2)对零部件加工方面。
零部件具有互换性,有利于实现专业化协作生产,这样产品单一,有利于提高产品质量和提高生产率,同时采用高效率的专业设备,实现生产过程的自动化。
3)在装配过程方面。
零部件具有互换性,有利于专业化分散生产,集中装配。
所以大大提高了生产率,同时实现自动化流水作业,大大降低工人的劳动强度。
4)对机器使用和维修方面。
当机器零件磨损或损坏后,可用相同规格的备件迅速替换,缩短修理时间,节约维修费用,保证机器工作的连续性和持久性,提高机器的使用率。
{1-2.完全互换与不完全互换有何区别用于何种场合零件或部件在装配成机器或更换时,既不需要选择,也不需要辅助加工与修配就能装配成机器,并能满足预定的使用性能要求,这样的零部件属于完全互换,而需要经过适当选择才能装配成机器,属于不完全互换。
不完全互换应用于机器装配精度高的场合。
1-3.下面两列数据属于哪种系列公比q为多少(1)电动机转速有(单位为r/min):375,600,937,1500…。
(2)摇臂钻床的主参数(最大钻孔直径,单位为mm):25,31,40,50…。
答:1)属于R5系列,公比为2)属于R10系列,公比为.第2章测量技术基础]2-1.量块的“等”和“级”是怎样划分的使用时有何不同量块按制造精度分为5级,即0、1、2、3和K级,其中0级精度最高,3级最低,K 为校准级,用来校准0、1、2、3级量块。
使用量块时,由于摩擦等原因使实际尺寸发生变化,所以需要定期地检测量块的实际尺寸,再按检测的实际尺寸来使用量块。
互换性与测量技术基础习题第一章:绪论一、判断题(×)1.为了使零件具有完全互换性,必须使零件的几何尺寸完全一致。
(×)2.有了公差标准,就能保证零件的互换性。
(√)3.为使零件的几何参数具有互换性,必须把零件的加工误差控制在给定的公差范围内。
(√)4.完全互换的装配效率必定高于不完全互换。
二、选择题1.保证互换性生产的基础是(A)。
A.标准化B.生产现代化 C.大批量生产 D.协作化生产2.下列论述中正确的有(ADE)。
A.因为有了大批量生产,所以才有零件互换性,因为有互换性生产才制定公差制.B.具有互换性的零件,其几何参数应是绝对准确的。
C.在装配时,只要不需经过挑选就能装配,就称为有互换性。
D.一个零件经过调整后再进行装配,检验合格,也称为具有互换性的生产。
E.不完全互换不会降低使用性能,且经济效益较好。
三、填空题:1.根据零部件互换程度的不同,互换性可分(完全)互换和(不完全)互换。
2.互换性是指产品零部件在装配时要求:装配前(不经挑选),装配中(不需调整或修配),装配后(能满足功能要求)。
3.公差标准是对(几何量误差) 的限制性措施,( 采用相应的技术措施)是贯彻公差与配合制的技术保证。
4.优先数系的基本系列有: (R5 )(R10)(R20)(R40)和R80,各系列的公比分别为:()()()()和()。
5.公差类型有(尺寸(角度))公差,(形状)公差,(位置)公差和(表面粗糙度)。
6.零件几何要求的允许误差称为(几何量公差),简称(公差)。
四、问答题:1.什么叫互换性?它在机械制造业中有何作用?答:*互换性是指制成的同一规格的零(部)件中,在装配时不作任何选择,附加调整或修配,能达到预定使用性能的要求。
*它在机械制造业中的作用反映在以下几个方面:(1)在设计方面,可简化设计程序,缩短设计周期,并便于用计算机辅助设计;(2)在制造方面,可保证优质高效生产;(3)在使用方面,使机器维修方便,可延长机器寿命。
第4章形位公差1.属于形状公差的有AB。
A.圆柱度。
B.平面度。
C.同轴度。
D.圆跳动。
E.平行度。
2.属于位置公差的有ACD。
A.平行度。
B.平面度。
C.端面全跳动。
D.倾斜度。
E.圆度。
3.圆柱度公差可以同时控制AB。
A.圆度。
B.素线直线度。
C.径向全跳动。
D.同轴度。
E.轴线对端面的垂直度。
4.下列论述正确的有ABC。
A.给定方向上的线位置度公差值前应加注符号“Φ”。
B.空间中,点位置度公差值前应加注符号“SΦ”。
C.任意方向上线倾斜度公差值前应加注符号“Φ”。
D.标注斜向圆跳动时,指引线箭头应与轴线垂直。
E.标注圆锥面的圆度公差时,指引线箭头应指向圆锥轮廓面的垂直方向。
5.对于径向全跳动公差,下列论述正确的有BC。
A.属于形状公差。
B.属于位置公差。
C.属于跳动公差。
D.与同轴度公差带形状相同。
E.当径向全跳动误差不超差时,圆柱度误差肯定也不超差。
6.形位公差带形状是半径差为公差值t的两圆柱面之间的区域有BD。
A.同轴度。
B.径向全跳动。
C.任意方向直线度。
D.圆柱度。
E.任意方向垂直度。
7.形位公差带形状是直径为公差值t的圆柱面内区域的有CDE。
A.径向全跳动。
B.端面全跳动。
C.同轴度。
D.任意方向线位置度。
E.任意方向线对线的平行度。
8.形位公差带形状是距离为公差值t的两平行平面内区域的有ACE。
A.平面度。
B.任意方向的线的直线度。
C.给定一个方向的线的倾斜度。
D.任意方向的线的位置度。
E.面对面的平行度。
9.对于端面全跳动公差,下列论述正确的有BCE。
A.属于形状公差。
B.属于位置公差。
C.属于跳动公差。
D.与平行度控制效果相同。
E.与端面对轴线的垂直度公差带形状相同。
10.下列公差带形状相同的有BD。
A.轴线对轴线的平行度与面对面的平行度。
B.径向圆跳动与圆度。
C.同轴度与径向全跳动。
D.轴线对面的垂直度与轴线对面的倾斜度。
E.轴线的直线度与导轨的直线度11.某轴Φ10 0mm○E则ADE。
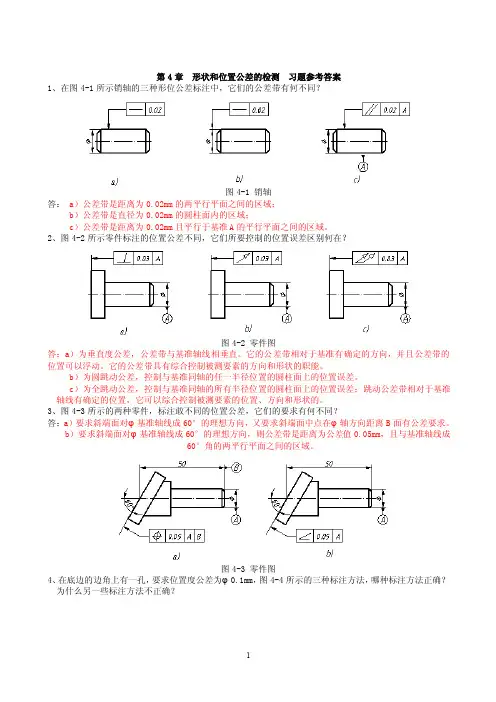
第4章形状和位置公差的检测习题参考答案1、在图4-1所示销轴的三种形位公差标注中,它们的公差带有何不同?图4-1 销轴答:a)公差带是距离为0.02mm的两平行平面之间的区域;b)公差带是直径为0.02mm的圆柱面内的区域;c)公差带是距离为0.02mm且平行于基准A的平行平面之间的区域。
2、图4-2所示零件标注的位置公差不同,它们所要控制的位置误差区别何在?图4-2 零件图答:a)为垂直度公差,公差带与基准轴线相垂直。
它的公差带相对于基准有确定的方向,并且公差带的位置可以浮动。
它的公差带具有综合控制被测要素的方向和形状的职能。
b)为圆跳动公差,控制与基准同轴的任一半径位置的圆柱面上的位置误差。
c)为全跳动公差,控制与基准同轴的所有半径位置的圆柱面上的位置误差;跳动公差带相对于基准轴线有确定的位置,它可以综合控制被测要素的位置、方向和形状的。
3、图4-3所示的两种零件,标注敢不同的位置公差,它们的要求有何不同?答:a)要求斜端面对φ基准轴线成60°的理想方向,又要求斜端面中点在φ轴方向距离B面有公差要求。
b)要求斜端面对φ基准轴线成60°的理想方向,则公差带是距离为公差值0.05mm,且与基准轴线成60°角的两平行平面之间的区域。
图4-3 零件图4、在底边的边角上有一孔,要求位置度公差为φ0.1mm,图4-4所示的三种标注方法,哪种标注方法正确?为什么另一些标注方法不正确?图4-4 零件图答:a)尺寸无公差而且也不是理论正确尺寸,无基准;b)基准符号标注位置不对;c)正确。
5、图4-5所示零件的技术要求是:⑴ 2×φd轴线对其公共轴线的同轴度公差为φ0.02mm;⑵φD轴线对2×φd公共轴线的垂直度公差为100:0.02;⑶φD轴线对2×φd公共轴线的偏离量不大于±10μm。
试用形位公差代号标出这些要求。
图4-5 零件图解:参考答案如图所示:图4-5 零件图参考答案6、图4-6所示零件的技术要求是:⑴法兰盘端面A对φ18H8孔的轴线的垂直度公差为0.015mm;⑵φ35圆周上均匀分布的4×φ8H8孔,要求以φ18H8孔的轴线和法兰盘端面A为基准以互换装配,位置度公差为φ0.05mm;⑶ 4×φ8H8四孔组中,有一个孔的轴线与φ4H8孔的轴线应在同一平面内,它的偏离量不大于±10μm。
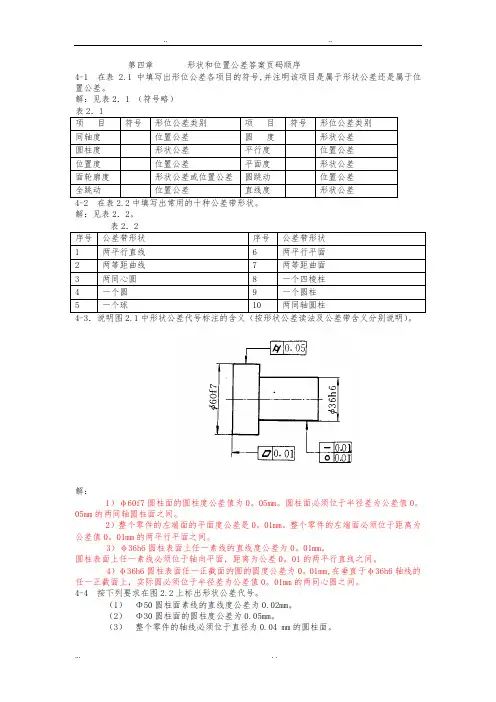
第四章形状和位置公差答案页码顺序4-1 在表2.1中填写出形位公差各项目的符号,并注明该项目是属于形状公差还是属于位置公差。
解:见表2.1 (符号略)项目符号形位公差类别项目符号形位公差类别同轴度位置公差圆度形状公差圆柱度形状公差平行度位置公差位置度位置公差平面度形状公差面轮廓度形状公差或位置公差圆跳动位置公差全跳动位置公差直线度形状公差解:见表2.2。
序号公差带形状序号公差带形状1 两平行直线 6 两平行平面2 两等距曲线7 两等距曲面3 两同心圆8 一个四棱柱4 一个圆9 一个圆柱5 一个球10 两同轴圆柱解:1)φ60f7圆柱面的圆柱度公差值为0。
05mm。
圆柱面必须位于半径差为公差值0。
05mm的两同轴圆柱面之间。
2)整个零件的左端面的平面度公差是0。
01mm。
整个零件的左端面必须位于距离为公差值0。
01mm的两平行平面之间。
3)φ36h6圆柱表面上任一素线的直线度公差为0。
01mm。
圆柱表面上任一素线必须位于轴向平面,距离为公差0。
01的两平行直线之间。
4)φ36h6圆柱表面任一正截面的圆的圆度公差为0。
01mm,在垂直于φ36h6轴线的任一正截面上,实际圆必须位于半径差为公差值0。
01mm的两同心圆之间。
4-4 按下列要求在图2.2上标出形状公差代号。
(1)Φ50圆柱面素线的直线度公差为0.02mm。
(2)Φ30圆柱面的圆柱度公差为0.05mm。
(3)整个零件的轴线必须位于直径为0.04 mm的圆柱面。
解:按要求在图2.1上标出形状公差代号图2.14-5 将下列技术要求用代号表注在图2.5上。
(1)Φ20d7圆柱面任一素线的直线度公差为0.05mm。
(或Φ20d7圆柱面任一素线必须位于轴向平面距离为公差值0.05mm的两平行直线之间。
)(2)被测Φ40m7轴线相对于Φ20d7轴线的同轴度公差为Φ0.01mm。
(或Φ40m7轴线必须位于直径为公差值0.01mm,且与Φ20d7轴线同轴的圆柱面。
第四章形状与位置公差一.判断题(正确的打√,错误的打×)1. 形位公差的研究对象是零件的几何要素。
()2. 基准要素是用来确定被测要素方向和位置的要素。
()3. 基准要素为中心要素时,基准符号应该与该要素的轮廓要素尺寸线错开。
()4. 一要素既有位置公差要求,又有形状公差要求时,形状公差值应大于位置公差值。
()5. 端面全跳动公差和端面对轴线垂直度公差的作用完全一致。
()6. 径向全跳动公差可以综合控制圆柱度和同轴度误差。
()7. 最大实体状态就是尺寸最大时的状态。
().8. 独立原则是指零件无形位误差。
()9. 最大实体要求之下关联要素的形位公差不能为零。
()10. 建立基准的基本原则是基准应符合最小条件。
()11. 理想要素与实际要素相接触即可符合最小条件。
()12. 某平面对基准平面的平行度误差为0.05mm,那么这平面的平面度误差一定不大于0.0 5mm。
( )13. 某圆柱面的圆柱度公差为0.03 mm,那么该圆柱面对基准轴线的径向全跳动公差不小于0.03mm。
()14. 对同一要素既有位置公差要求,又有形状公差要求时,形状公差值应大于位置公差值。
()15. 对称度的被测中心要素和基准中心要素都应视为同一中心要素。
()16. 某实际要素存在形状误差,则一定存在位置误差。
()17. 图样标注中Φ20+0.021 0mm孔,如果没有标注其圆度公差,那么它的圆度误差值可任意确定。
()18. 圆柱度公差是控制圆柱形零件横截面和轴向截面内形状误差的综合性指标。
()19. 线轮廓度公差带是指包络一系列直径为公差值t的圆的两包络线之间的区域,诸圆圆心应位于理想轮廓线上。
()20. 零件图样上规定Φd实际轴线相对于ΦD基准轴线的同轴度公差为Φ0.02mm。
这表明只要Φd实际轴线上各点分别相对于ΦD基准轴线的距离不超过0.02 mm,就能满足同轴度要求。
()二.单项选择题:1. 作用尺寸是由_____而形成的一个理想圆柱的尺寸。
第四章形状与位置公差一.判断题(正确的打√,错误的打×)1. 形位公差的研究对象是零件的几何要素。
( y )2. 基准要素是用来确定被测要素方向和位置的要素。
( y )3. 基准要素为中心要素时,基准符号应该与该要素的轮廓要素尺寸线错开。
( n )4. 一要素既有位置公差要求,又有形状公差要求时,形状公差值应大于位置公差值。
(n )5. 端面全跳动公差和端面对轴线垂直度公差的作用完全一致。
(y )6. 径向全跳动公差可以综合控制圆柱度和同轴度误差。
( y )7. 最大实体状态就是尺寸最大时的状态。
( n ).8. 独立原则是指零件无形位误差。
( n)9. 最大实体要求之下关联要素的形位公差不能为零。
( n )10. 建立基准的基本原则是基准应符合最小条件。
(n )11. 理想要素与实际要素相接触即可符合最小条件。
(n )12. 某平面对基准平面的平行度误差为0.05mm,那么这平面的平面度误差一定不大于0.0 5mm。
( y )13. 某圆柱面的圆柱度公差为0.03 mm,那么该圆柱面对基准轴线的径向全跳动公差不小于0.03mm。
(n )14. 对同一要素既有位置公差要求,又有形状公差要求时,形状公差值应大于位置公差值。
(n)15. 对称度的被测中心要素和基准中心要素都应视为同一中心要素。
(n)16. 某实际要素存在形状误差,则一定存在位置误差。
(y)17. 图样标注中Φ20+0.021 0mm孔,如果没有标注其圆度公差,那么它的圆度误差值可任意确定。
(y )18. 圆柱度公差是控制圆柱形零件横截面和轴向截面内形状误差的综合性指标。
(y )19. 线轮廓度公差带是指包络一系列直径为公差值t的圆的两包络线之间的区域,诸圆圆心应位于理想轮廓线上。
(y)20. 零件图样上规定Φd实际轴线相对于ΦD基准轴线的同轴度公差为Φ0.02mm。
这表明只要Φd实际轴线上各点分别相对于ΦD基准轴线的距离不超过0.02 mm,就能满足同轴度要求。
第4章 形状和位置公差判断题(对的填上“√”,错的填上“×”)1、某平面对基准平面的平行度误差为0.05mm ,那么这平面的平面度误差一定不大于0.05mm 。
( )2、某圆柱面的圆柱度公差为0.03 mm ,那么该圆柱面对基准轴线的径向全跳动公差不小于0.03mm 。
( )3、对同一要素既有位置公差要求,又有形状公差要求时,形状公差值应大于位置公差值。
( )4、对称度的被测中心要素和基准中心要素都应视为同一中心要素。
( )5、某实际要素存在形状误差,则一定存在位置误差。
( )6、图样标注中021.0020+φ mm 孔,如果没有标注其圆度公差,那么它的圆度误差值可任意确定。
( )7、圆柱度公差是控制圆柱形零件横截面和轴向截面内形状误差的综合性指标。
( )8、线轮廓度公差带是指包络一系列直径为公差值t 的圆的两包络线之间的区域,诸圆圆心应位于理想轮廓线上。
( )9、零件图样上规定Φd 实际轴线相对于ΦD 基准轴线的同轴度公差为Φ0.02 mm 。
这表明只要Φd 实际轴线上各点分别相对于ΦD 基准轴线的距离不超过0.02 mm ,就能满足同轴度要求。
( )10、若某轴的轴线直线度误差未超过直线度公差,则此轴的同轴度误差亦合格。
( )11、端面全跳动公差和平面对轴线垂直度公差两者控制的效果完全相同。
( )12、端面圆跳动公差和端面对轴线垂直度公差两者控制的效果完全相同。
( )13、尺寸公差与形位公差采用独立原则时,零件加工的实际尺寸和形位误差中有一项超差,则该零件不合格。
( )14、独立原则是指零件无形位误差。
( )15、作用尺寸是由局部尺寸和形位误差综合形成的理想边界尺寸。
对一批零件来说,若已知给定的尺寸公差值和形位公差值,则可以分析计算出作用尺寸。
( )16、被测要素处于最小实体尺寸和形位误差为给定公差值时的综合状态,称为最小实体实效状态。
( )17、当包容要求用于单一要素时,被测要素必须遵守最大实体实效边界。
第4章形位公差1.属于形状公差的有AB。
A.圆柱度。
B.平面度。
C.同轴度。
D.圆跳动。
E.平行度。
2.属于位置公差的有ACD。
A.平行度。
B.平面度。
C.端面全跳动。
D.倾斜度。
E.圆度。
3.圆柱度公差可以同时控制AB。
A.圆度。
B.素线直线度。
C.径向全跳动。
D.同轴度。
E.轴线对端面的垂直度。
4.下列论述正确的有ABC。
A.给定方向上的线位置度公差值前应加注符号“Φ”。
B.空间中,点位置度公差值前应加注符号“SΦ”。
C.任意方向上线倾斜度公差值前应加注符号“Φ”。
D.标注斜向圆跳动时,指引线箭头应与轴线垂直。
E.标注圆锥面的圆度公差时,指引线箭头应指向圆锥轮廓面的垂直方向。
5.对于径向全跳动公差,下列论述正确的有BC。
A.属于形状公差。
B.属于位置公差。
C.属于跳动公差。
D.与同轴度公差带形状相同。
E.当径向全跳动误差不超差时,圆柱度误差肯定也不超差。
6.形位公差带形状是半径差为公差值t的两圆柱面之间的区域有BD。
A.同轴度。
B.径向全跳动。
C.任意方向直线度。
D.圆柱度。
E.任意方向垂直度。
7.形位公差带形状是直径为公差值t的圆柱面内区域的有CDE。
A.径向全跳动。
B.端面全跳动。
C.同轴度。
D.任意方向线位置度。
E.任意方向线对线的平行度。
8.形位公差带形状是距离为公差值t的两平行平面内区域的有ACE。
A.平面度。
B.任意方向的线的直线度。
C.给定一个方向的线的倾斜度。
D.任意方向的线的位置度。
E.面对面的平行度。
9.对于端面全跳动公差,下列论述正确的有BCE。
A.属于形状公差。
B.属于位置公差。
C.属于跳动公差。
D.与平行度控制效果相同。
E.与端面对轴线的垂直度公差带形状相同。
10.下列公差带形状相同的有BD。
A.轴线对轴线的平行度与面对面的平行度。
B.径向圆跳动与圆度。
C.同轴度与径向全跳动。
D.轴线对面的垂直度与轴线对面的倾斜度。
E.轴线的直线度与导轨的直线度○E11.某轴Φ10 0 -0.015 mm则ADE。
互换性与测量技术基础习题第一章:绪论一、判断题(×)1.为了使零件具有完全互换性,必须使零件的几何尺寸完全一致。
(×)2.有了公差标准,就能保证零件的互换性。
(√)3.为使零件的几何参数具有互换性,必须把零件的加工误差控制在给定的公差围。
(√)4.完全互换的装配效率必定高于不完全互换。
二、选择题1.保证互换性生产的基础是(A)。
A.标准化B.生产现代化 C.大批量生产 D.协作化生产2.下列论述中正确的有(ADE)。
A.因为有了大批量生产,所以才有零件互换性,因为有互换性生产才制定公差制.B.具有互换性的零件,其几何参数应是绝对准确的。
C.在装配时,只要不需经过挑选就能装配,就称为有互换性。
D.一个零件经过调整后再进行装配,检验合格,也称为具有互换性的生产。
E.不完全互换不会降低使用性能,且经济效益较好。
三、填空题:1.根据零部件互换程度的不同,互换性可分(完全)互换和(不完全)互换。
2.互换性是指产品零部件在装配时要求:装配前(不经挑选),装配中(不需调整或修配),装配后(能满足功能要求)。
3.公差标准是对(几何量误差) 的限制性措施,( 采用相应的技术措施)是贯彻公差与配合制的技术保证。
4.优先数系的基本系列有: (R5 )(R10)(R20)(R40)和R80,各系列的公比分别为:()()()()和()。
5.公差类型有(尺寸(角度))公差,(形状)公差,(位置)公差和(表面粗糙度)。
6.零件几何要求的允许误差称为(几何量公差),简称(公差)。
四、问答题:1.什么叫互换性?它在机械制造业中有何作用?答:*互换性是指制成的同一规格的零(部)件中,在装配时不作任何选择,附加调整或修配,能达到预定使用性能的要求。
*它在机械制造业中的作用反映在以下几个方面:(1)在设计方面,可简化设计程序,缩短设计周期,并便于用计算机辅助设计;(2)在制造方面,可保证优质高效生产;(3)在使用方面,使机器维修方便,可延长机器寿命。
第4章形位公差1.属于形状公差的有AB。
A.圆柱度。
B.平面度。
C.同轴度。
D.圆跳动。
E.平行度。
2.属于位置公差的有ACD。
A.平行度。
B.平面度。
C.端面全跳动。
D.倾斜度。
E.圆度。
3.圆柱度公差可以同时控制AB。
A.圆度。
B.素线直线度。
C.径向全跳动。
D.同轴度。
E.轴线对端面的垂直度。
4.下列论述正确的有ABC。
A.给定方向上的线位置度公差值前应加注符号“Φ”。
B.空间中,点位置度公差值前应加注符号“SΦ”。
C.任意方向上线倾斜度公差值前应加注符号“Φ”。
D.标注斜向圆跳动时,指引线箭头应与轴线垂直。
E.标注圆锥面的圆度公差时,指引线箭头应指向圆锥轮廓面的垂直方向。
5.对于径向全跳动公差,下列论述正确的有BC。
A.属于形状公差。
B.属于位置公差。
C.属于跳动公差。
D.与同轴度公差带形状相同。
E.当径向全跳动误差不超差时,圆柱度误差肯定也不超差。
6.形位公差带形状是半径差为公差值t的两圆柱面之间的区域有BD。
A.同轴度。
B.径向全跳动。
C.任意方向直线度。
D.圆柱度。
E.任意方向垂直度。
7.形位公差带形状是直径为公差值t的圆柱面内区域的有CDE。
A.径向全跳动。
B.端面全跳动。
C.同轴度。
D.任意方向线位置度。
E.任意方向线对线的平行度。
8.形位公差带形状是距离为公差值t的两平行平面内区域的有ACE。
A.平面度。
B.任意方向的线的直线度。
C.给定一个方向的线的倾斜度。
D.任意方向的线的位置度。
E.面对面的平行度。
9.对于端面全跳动公差,下列论述正确的有BCE。
A.属于形状公差。
B.属于位置公差。
C.属于跳动公差。
D.与平行度控制效果相同。
E.与端面对轴线的垂直度公差带形状相同。
10.下列公差带形状相同的有BD。
A.轴线对轴线的平行度与面对面的平行度。
B.径向圆跳动与圆度。
C.同轴度与径向全跳动。
D.轴线对面的垂直度与轴线对面的倾斜度。
E.轴线的直线度与导轨的直线度11.某轴Φ10 0 -0.015mm○E则ADE。
A.被测要素遵守MMC边界。
B.被测要素遵守MMVC边界。
C.当被测要素尺寸为Φ10 mm时,允许形状误差最大可达0.015 mm。
D.当被测要素尺寸为Φ9.985mm时,允许形状误差最大可达0.015 mm。
E.局部实际尺寸应大于等于最小实体尺寸。
12.被测要素采用最大实体要求的零形位公差时BCD。
A.位置公差值的框格内标注符号○E。
B.位置公差值的框格内标注符号Φ0○M。
C.实际被测要素处于最大实体尺寸时,允许的形位误差为零。
D.被测要素遵守的最大实体实效边界等于最大实体边界。
E.被测要素遵守的是最小实体实效边界。
13.下列论述正确的有BC。
A.孔的最大实体实效尺寸= D max一形位公差。
B.孔的最大实体实效尺寸= 最大实体尺寸一形位公差.C.轴的最大实体实效尺寸= d max十形位公差。
D.轴的最大实体实效尺寸= 实际尺寸十形位误差.E.最大实体实效尺寸= 最大实体尺寸。
E则AD。
14.某孔Φ10 +0.0150mm○A.被测要素遵守MMC边界。
B.被测要素遵守MMVC边界。
C.当被测要素尺寸为Φ10 mm时,允许形状误差最大可达0.015mm。
D.当被测要素尺寸为Φ10.01 mm时,允许形状误差可达0.01 mm 。
E.局部实际尺寸应大于或等于最小实体尺15.圆柱度和径向全跳动公差带相同点是公差带形状相同,不同点是前者公差带轴线位置浮动而后者轴线的位置是固定的。
16.在形状公差中,当被测要素是一空间直线,若给定一个方向时,其公差带是距离为公差值t的两平行平面之间的区域。
若给定任意方向时,其公差带是直径为公差值t的圆柱面内区域。
17.圆度的公差带形状是半径差为公差值t的两同心圆之间的区域,圆柱度的公差带形状是半径差为公差值t的两同轴圆柱面之间的区域。
18.当给定一个方向时,对称度的公差带形状是距离为公差值t,且相对基准中心平面(或中心线、轴线)对称配置的两平行平面之间的区域。
19.轴线对基准平面的垂直度公差带形状在给定两个互相垂直方向时是距离分别为公差值t1 、t2的两对平行平面之间的区域。
20.由于径向全跳动误差包括了圆柱度误差和同轴度误差,当径向全跳动误差不大于给定的圆柱度公差值时,可以肯定圆柱度误差不会超差。
21.当零件端面制成内凹或中凸时,端面圆跳动可能为零。
但却存在垂直度误差。
22.径向圆跳动在生产中常用它来代替轴类或箱体零件上的同轴度公差要求,其使用前提是满足其功能要求。
23.径向圆跳动公差带与圆度公差带在形状方面相同,但前者公差带圆心的位置是固定而后者公差带圆心的位置是浮动。
24.在任意方向上,线对面倾斜度公差带的形状是直径为公差值t,且与基准平面成理论正确角度的圆柱面内的区域,线的位置度公差带形状是直径为公差值t,且以线的理想位置为轴线的圆柱面内的区域。
25.图样上规定健槽对轴的对称度公差为0.05mm,则该键槽中心偏离轴的轴线距离不得大于0.025mm。
mm,轴线直线度公差为Φ0.005 mm,实测得其局部尺寸为Φ40.09 mm,27.某孔尺寸为Φ40+0.119+0.030轴线直线度误差为Φ0.003 mm,则孔的最大实体尺寸是Ф40.03mm,最小实体尺寸是Ф40.119m m,作用尺寸是Ф40.087mm。
mm,轴线直线度公差为Φ0.005 mm,实测得其局部尺寸为Φ40.031 mm,28.某轴尺寸为Φ40+0.041+0.030轴线直线度误差为Φ0.003 mm,则轴的最大实体尺寸是Ф40.041mm,最大实体实效尺寸是Ф4.0046 mm,作用尺寸是Ф40.033mm。
mm○E,实测得其尺寸为Φ40.09 mm,则其允许的形位误差数值是0.06mm,29.某孔尺寸为Φ40+0.119+0.030当孔的尺寸是Ф40.119mm时,允许达到的形位误差数值为最大。
30.某轴尺寸为Φ40+0.041mm○E,实测得其尺寸为Φ40.03 mm,则允许的形位误差数值是0.011mm,+0.030该轴允许的形位误差最大值为0.011mm。
mm○E,遵守边界为MMC,边界尺寸为Ф20mm,实际尺寸为Φ20 mm时,允31.某轴尺寸为Φ20 0-0.1许的形位误差为_0_mm。
mm,被测要素给定的尺寸公差和形位公差采用最小实体要求,则垂直度公32.某轴尺寸为Φ10-0.018-0.028差0.01是在被测要素为最小实体状态时给定的。
当轴实际尺寸为_Ф9.972_mm是,允许的垂直度误差达最大,可达0.02mm。
33.改正图2-1中各项形位公差标注上的错误(不得改变形位公差项目)。
34. 改正图2-2中各项形位公差标注上的错误(不得改变形位公差项目)。
图2-235.改正图2-3中各项形位公差标注上的错误(不得改变形位公差项目)。
图2-310.改正图2-4中各项形位公差标注上的错误(不得改变形位公差项目)。
图2-411.改正图2-5中各项形位公差标注上的错误(不得改变形位公差项目)。
图2-512.改正图2-6中各项形位公差标注上的错误(不得改变形位公差项目)。
图2-613.改正图2-7中各项形位公差标注上的错误(不得改变形位公差项目)。
图2-716.将下列技术要求标注在图2-10。
(1)圆锥面的圆度公差为0.01 mm,圆锥素线直线度公差为0.02 mm。
(2)圆锥轴线对φd1和φd2两圆柱面公共轴线的同轴度为0.05 mm。
图2-1017.将下列技术要求标注在图2-11上。
(1)左端面的平面度公差为0.01 mm,右端面对左端面的平行度公差为0.04 mm。
(2)φ70H7孔的轴线对左端面的垂直度公差为0.02mm。
(3)φ210h7轴线对φ70H7孔轴线的同轴度公差为φ0.03mm。
(4)4-φ20H8孔的轴线对左端面(第一基准)和φ70H7孔轴线的位置度公差为φ0.15mm。
图2-1118.试将下列技术要求标注在图2-12上。
(1)2-φd轴线对其公共轴线的同轴度公差为φ0.02mm。
(2)φD轴线对2-φd公共轴线的垂直度公差为100 :0.02 mm。
(3)槽两侧面对φD轴线的对称度公差为0.04 mm。
槽图2-1219.试将下列技术要求标注在图2-13上。
(1)圆锥面a的圆度公差为0.1 mm。
(2)圆锥面a对孔轴线b的斜向圆跳动公差为0.02mm。
(3)基准孔轴线b的直线度公差为0.005mm。
(4)孔表面c的圆柱度公差为0.0lmm。
(5)端面d对基准孔轴线b的端面全跳动公差为0.01mm。
(6)端面e对端面d的平行度公差为0.03mm。
图2-1320.试将下列技术要求标注在图2-14上。
(1)φ30K7和φ50M7采用包容原则。
(2)底面F的平面度公差为0.02mm;φ30K7孔和φ50M7孔的内端面对它们的公共轴线的圆跳动公差为0.04 mm。
(3)φ30K7孔和φ50M7孔对它们的公共轴线的同轴度公差为0.03mm。
(4)6-φ11H10对φ50M7孔的轴线和F面的位置度公差为0.05mm,基准要素的尺寸和被测要素的位置度公差应用最大实体要求。
图2-1421.试将下列技术要求标注在图2-15上。
mm的圆柱度误差不大于0.02mm,圆度误差不大于0.0015 mm。
(l)φ5+0.05-0.03mm的轴线的端面圆跳动不大(2)B面的平面度误差不大于0.001mm,B面对φ5+0.05-0.03于0.04 mm,B面对C面的平行度误差不大于0.02mm。
(3)平面F对φ5+0.05mm轴线的端面圆跳动不大于0.04 mm。
-0.03mm内孔轴线的同轴度误差不大于0.2 mm。
(4)φ18d11外圆柱面的轴线对φ5+0.05-0.03(5)φ12b11外圆柱面轴线对φ5+0.05mm孔轴线的同轴度误差不大于φ0.16 mm。
-0.03mm孔轴线的同轴度误差不大于φ(6)90°30″密封锥面G对φ5+0.05-0.03(7)锥面G的圆度误差不大于0.002 mm。
图2-1525.按表2-2中的内容,说明图2-19中的公差代号的含义。
表2-2代 号解释代号含义公差带形状。