机械原理第九章 轮系.ppt
- 格式:ppt
- 大小:3.07 MB
- 文档页数:54
《机械原理》第九章齿轮系及其设计——周转轮系传动比的计算2H 2H 1313反转原理:给整个周转轮系加上“-ωH ”,不改变轮系中各构件之间的相对运动,但原周转轮系将转化成为一定轴轮系,可按定轴轮系的公式计算转化后轮系的传动比。
转化后所得轮系称为原周转轮系的2K-H 型“转化轮系”-ωH1 ω1将轮系按-ωH 反转后,各构件的角速度的变化如下:2 ω23 ω3H ωH转化后: 系杆=>机架,周转轮系=>定轴轮系构件原角速度转化后的角速度2H 13ω1H =ω1-ωHω2H =ω2-ωH ω3H =ω3-ωHωH H =ωH -ωH =02H 13上式“-”说明在转化轮系中ω1H 与ω3H 方向相反。
H H H i3113ωω=2132z z z z -=13z z -=H Hωωωω--=312H 132H 131133i ωω=周转轮系中1、3之间的传动比2132z z z z -=H Hωωωω--=31H H H i3113ωω=13z z -=通用表达式:Hn Hm ωωωω--=m n m n =±转化轮系中由至各从动轮齿数的乘积转化轮系中由至各主动轮齿数的乘积H nH m H mniωω=1. 齿轮m 、n 和H 的轴线必须平行。
2.公式中的“±” 不能去掉,它不仅表明转化轮系中两个太阳轮m 、n 之间的转向关系,而且影响到ωm 、ωn 、ωH 的计算结果。
特别注意:通用表达式:Hn H m ωωωω--=m n m n =±转化轮系中由至各从动轮齿数的乘积转化轮系中由至各主动轮齿数的乘积H nH m H mniωω=特别注意:3. ωm 、ωn 、ωH 的已知值代入上式时必须带正负号,当假定其中某一已知值的转向为正时,则转向与之相同的取正,与之相反的取负。
4.i mn H ≠i mn ,i mn H 为转化轮系中m 、n 两轮的角速度之比,其大小和方向按定轴轮系传动比的计算来确定;i mn 为周转轮系中m 、n 两轮的绝对速度之比,其大小和方向按其转化轮系的公式推导出来。
《机械原理》第九章齿轮系及其设计——轮系的类型轮系:由一系列齿轮组成的传动系统。
通常用来实现变速、变向及实现大传动比等。
轮系:由一系列齿轮组成的传动系统。
通常用来实现变速、变向及实现大传动比等。
轮系:由一系列齿轮组成的传动系统。
通常用来实现变速、变向及实现大传动比等。
76N S1234589101112HME 通常用来实现变速、变向及实现大传动比等。
轮系:由一系列齿轮组成的传动系统。
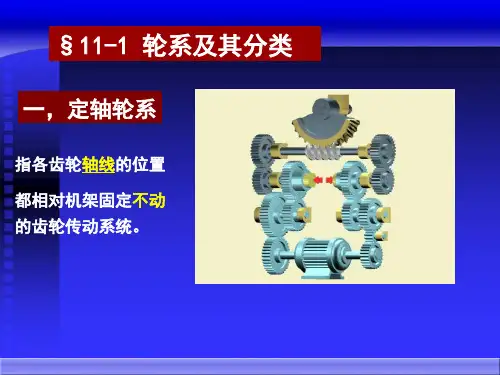
轮系分类周转轮系定轴轮系(轴线固定)复合轮系平面定轴轮系空间定轴轮系根据轮系在运转过程中各轮几何轴线在空间的相对位置是否变化分:轮系分类周转轮系定轴轮系(轴线固定)复合轮系平面定轴轮系空间定轴轮系根据轮系在运转过程中各轮几何轴线在空间的相对位置是否变化分:轮系分类周转轮系定轴轮系(轴线固定)复合轮系平面定轴轮系空间定轴轮系根据轮系在运转过程中各轮几何轴线在空间的相对位置是否变化分:轮系分类周转轮系定轴轮系(轴线固定)复合轮系平面定轴轮系空间定轴轮系根据轮系在运转过程中各轮几何轴线在空间的相对位置是否变化分:1234轮系分类周转轮系定轴轮系(轴线固定)复合轮系平面定轴轮系空间定轴轮系根据轮系在运转过程中各轮几何轴线在空间的相对位置是否变化分:在轮系运转过程中至少有一个齿轮几何轴线的位置并不固定,而是绕着其它定轴齿轮轴线回转的轮系——周转轮系。
轮系分类周转轮系定轴轮系(轴线固定)复合轮系平面定轴轮系空间定轴轮系根据轮系在运转过程中各轮几何轴线在空间的相对位置是否变化分:2H13在轮系运转过程中至少有一个齿轮几何轴线的位置并不固定,而是绕着其它定轴齿轮轴线回转的轮系——周转轮系。
图示轮系中,齿轮1、3的轴线相重合,它们均为定轴齿轮,而齿轮2的转轴装在构件H的端部,在构件H的带动下,它可以绕齿轮1、3的轴线作周转。
轮系分类周转轮系定轴轮系(轴线固定)复合轮系平面定轴轮系空间定轴轮系根据轮系在运转过程中各轮几何轴线在空间的相对位置是否变化分:2H13中心轮——与行星轮相啮合的定轴齿轮1和3,又称为太阳轮。

机械原理——轮系机械原理,轮系轮系是机械中常见的一种传动机构,通过多个轮齿的互相啮合实现能量的传递和转换。
轮系一般由一个或多个主动轮和一个或多个被动轮组成。
主动轮通过外力的作用将动力传递给被动轮,被动轮则将动力传递给其他机械部件。
轮系的基本原理是利用轮齿的啮合来实现转动的传递。
在轮系中,两个轮齿垂直于轴线的轮称为齿轮,两个平行于轴线的轮称为平轮。
轮齿的形状和尺寸决定了轮系的传动比和转矩大小。
常见的齿轮包括圆柱齿轮、锥齿轮、斜齿轮等,而平轮通常为圆盘状。
轮系的主要功能是实现速度变换、转矩变换和传递。
其中,速度变换是指通过不同大小的齿轮组合来改变传动的速度。
传动比由齿轮的齿数比决定,齿数越大的齿轮转速越慢,齿数越小的齿轮转速越快。
通过适当选择齿数比,可以实现从高速到低速或从低速到高速的转变。
转矩变换是指通过轮系将一定转矩转换为不同大小的转矩。
转矩的大小由齿轮的半径和传动力决定,半径越大转矩越大,传动力越大转矩越小。
通过合理选择齿轮的半径,可以实现转矩的放大或减小。
轮系的传递过程中会有一定的功率损耗。
这是由于轮齿间的副动摩擦、齿轮的弹性变形和轴承摩擦等原因引起的。
为了减少功率损耗,需要选择合适的材料、润滑方式和合理的轴承布置。
轮系的应用十分广泛。
在机械工程中,轮系经常用于传动装置中,如汽车的变速器、液压泵、风力发电机等。
此外,在各类设备和仪器中,轮系也被广泛应用于地铁、电梯、空调等。
轮系作为一种传动机构,在实际应用中需要考虑的因素很多。
例如,齿轮的设计和加工精度、齿轮的材料和强度、齿轮啮合时的噪声和振动等。
为了确保轮系的正常运行和使用寿命,需要进行合理的设计和维护。
总之,轮系是机械中一种常见的传动机构,通过轮齿的啮合实现转动的传递。
它具有速度变换、转矩变换和传递的功能。
轮系在汽车、机械设备和仪器仪表等领域具有广泛的应用。
在实际应用中,需要考虑轮系的设计和加工精度、材料强度、噪声和振动等因素,以确保其正常运行和使用寿命。