机械原理第八版第三章解剖
- 格式:ppt
- 大小:643.50 KB
- 文档页数:19
机械原理——平面机构的运动分析第3章平面机构的运动分析3-1 机构运动分析的目的和方法3-2 速度瞬心法求机构速度3-3 矢量方程图解法求速度、加速度3-4 综合法进行速度分析3-5 解析法求运动分析基本要求: 理解速度瞬心的概念、数目和位置的确定方法熟练掌握速度瞬心法在机构速度分析中的应用熟练掌握矢量方程图解法进行运动分析掌握用解析法对机构进行运动分析机械原理——平面机构的运动分析任务、方法一、机构运动分析的任务已知:原动件的运动规律和机构运动尺寸确定:⑴各构件的位置、角位移、角速度、角加速度;⑵构件上某些点的轨迹、位移、速度、加速度二、机构运动分析的方法图解法: 速度瞬心法、矢量方程图解法解析法:矢量法、复数法矩阵法、基本杆组法机械原理——平面机构的运动分析3-2 速度瞬心法求机构速度一、速度瞬心的概念二、机构的瞬心数目三、瞬心位置的确定四、用速度瞬心进行机构的速度分析机械原理——平面机构的运动分析一、速度瞬心Instant Center 《理论力学》:当任一刚体相对于另一刚体作平面运动时,在任一瞬时,都可2 以认为它们是绕某一点作相对转动,该点称为瞬时相对回转中心。
υA2A1AA1瞬时相对回转中心的位置P12 2B 2B 1υ B2B1既然P12是瞬时相对回转中心则该瞬时两构件在P12的相对速度为零,或者说绝对速度相等所以P12为两构件该瞬时的等速重合点P12 速度瞬心:两构件瞬时等速重合点相对速度为零,绝对速度相等 1 瞬心:相对瞬心、绝对瞬心瞬心:机械原理——平面机构的运动分析三、瞬心位置的确定1 由瞬心定义确定通过运动副直接相联的构件——显瞬心n P12 ∞ P12 P12 C P23 纯滚2 滚+动滑P12 B 3 P12 1 P12机械原理——平面机构的运动分析瞬心位置的确定2 借助三心定理确定不通过运动副直接相联的构件——隐含的瞬心三心定理:三个相互作平面运动的构件有三个瞬心,且在一条直线上。
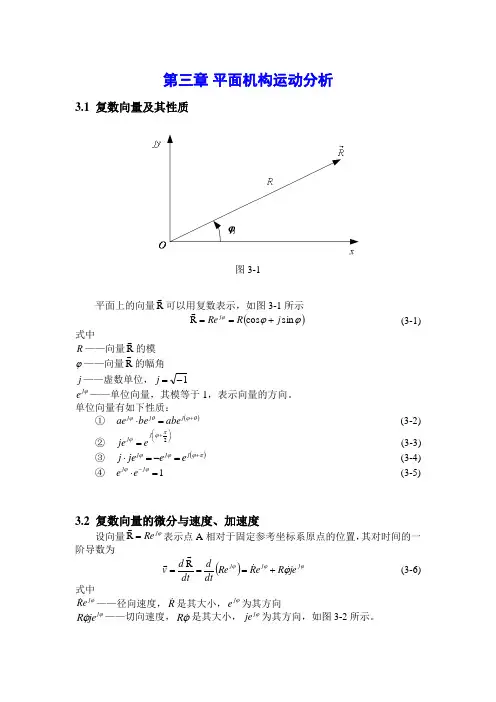
第三章 平面机构运动分析3.1 复数向量及其性质图3-1平面上的向量R可以用复数表示,如图3-1所示()ϕϕϕsin cos R j R Re j +==(3-1)式中R ——向量R的模ϕ——向量R的幅角j ——虚数单位,1-=jϕj e ——单位向量,其模等于1,表示向量的方向。
单位向量有如下性质:① ()θϕθϕ+=⋅j j j abe be ae (3-2)② ⎪⎭⎫ ⎝⎛+=2πϕϕj j e je (3-3) ③ ()πϕϕϕ+=-=⋅j j j e e je j (3-4) ④ 1=⋅-ϕϕj j e e (3-5)3.2 复数向量的微分与速度、加速度设向量ϕj Re =R表示点A 相对于固定参考坐标系原点的位置,其对时间的一阶导数为()ϕϕϕϕj j j je R e RRe dtd dt d v +===R (3-6) 式中ϕj e R——径向速度,R 是其大小,ϕj e 为其方向 ϕϕj je R ——切向速度,ϕ R 是其大小,ϕj je 为其方向,如图3-2所示。
图3-2将式(3-6)再次时间求导,有ϕϕϕϕϕϕϕj j j j je R je R e R e R dtv d dt d a2R 222++-=== (3-7) 式中ϕj e R——径向加速度,大小R ,方向ϕj e ϕϕj e R 2 -——法向加速度,大小2ϕ R ,方向ϕj e - ϕϕj je R ——切向加速度,大小ϕ R ,方向ϕj je ϕϕj je R2——哥氏加速度,大小ϕ R 2,方向ϕj je 上述加速度分量如图3-3所示。
图3-33.3 铰链四杆机构的运动分析机构的运动分析需要解决三个问题,位移、速度和加速度,其中位移的求解是最困难的。
这是因为机构的位置方程往往是非线性方程或方程组。
在位移已知的情况下,速度和加速度方程是线性的。
所以说,机构的位移分析是机构运动分析的难点。
如图3-4所示,铰链四杆机构由一个双杆组和机架与原动件组成,是最简单的机构形式。