变频器实例组态入门
- 格式:pdf
- 大小:2.54 MB
- 文档页数:16

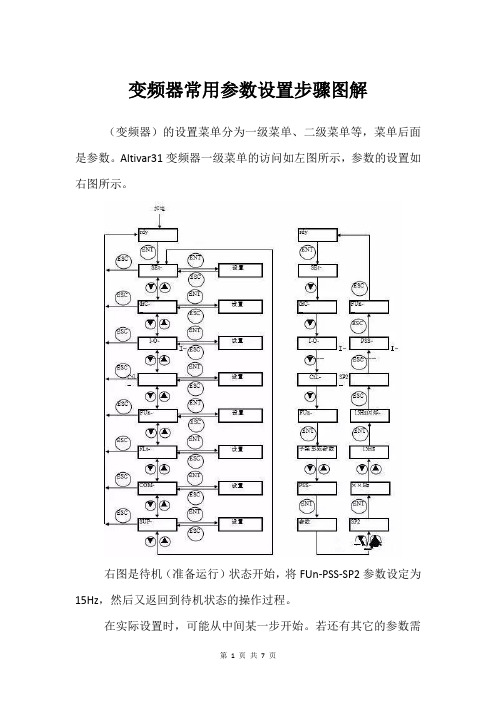
变频器常用参数设置步骤图解(变频器)的设置菜单分为一级菜单、二级菜单等,菜单后面是参数。
Altivar31变频器一级菜单的访问如左图所示,参数的设置如右图所示。
右图是待机(准备运行)状态开始,将FUn-PSS-SP2参数设定为15Hz,然后又返回到待机状态的操作过程。
在实际设置时,可能从中间某一步开始。
若还有其它的参数需要设置,不需要返回到待机状态,只要返回到相应的一级继续设置即可。
全部参数设置完毕需要返回到待机状态准备开车。
有些参数还可以在变频器有些过程中进行设置。
错误的设置可能损坏变频器!没有弄清楚的参数不要随意设置!常用参数是经常使用的一些参数,主要包括以下内容(以Altivar31变频器为例):1、上限频率(高速)SEt-HSP与下限频率(低速)SEt-LSP上限频率是最大给定所对应的频率,下限频率是最小给定所对应的频率。
上下限频率的设定是为了限制电动机的转速,从而满足设备运行控制的要求。
2、加速时间(加速斜坡时间)SEt-ACC与减速时间(减速斜坡时间)SEt-dEC加速时间是变频器从0Hz加速到额定频率(通常为50Hz)所需的时间,加速斜坡类型由FUn—rPC-rPt设置。
减速时间是变频器从额定频率减速到0Hz所需的时间。
设定加、减速时间必须与负载的加、减速相匹配。
(电机)功率越大,需要的加、减速时间也越长。
一般11kW以下的电机,加、减速时间可设置在10s以内。
对于大容量的电机,若设置加速时间太短,可能会使变频器过流跳闸;设置减速时间太短,可能会使变频器过压跳闸。
对于多电机同步运行的情况,若设置加速时间太短,可能会使变频器过流跳闸,设置加速时间太长,会使开车时同步性能变坏;设置减速时间太短,可能会使变频器过压跳闸,设置减速时间太长,由于各电机功率不同,负载差异较大,可能会使各电机不能同时停转,造成下次开车困难。
因此,多电机同步运行时,需要精确设置加、减速时间,这也是设备调试的主要项目之一。


SEW变频器MC07B使用说明MCO7B型号变频器不带编码器,无法反馈实时位置,只能检测到0度和180度,不要无限旋转,以免扭断线缆或气管。
变频器在出厂时供应商已经设置好,我们只需用在PLC中组网分配IP地址即可。
注意:FIBRO转台原点位置由机械结构决定,提醒机械设计人员注意。
一、PLC组态1、添加GSD文件我们需用通过博途软件中选项—支持包—从文件系统添加(找到GSD文件位置)点击安装即可。
2、网络组态在硬件目录其他现场设备—PROFINET IO—Drivers中找到对应设备,同时分配IO地址,连接好通讯网线,完成后下载硬件和软件到PLC中即可。
二、变频器状态SEW变频器与PLC的通讯状态:通讯异常:显示屏下的小灯熄灭;BUS FAULT灯常亮;H1指示灯常亮;通讯正常:显示屏下的小灯常亮;BUS FAULT灯熄灭;H1指示灯熄灭;通讯异常通讯正常1、连接随机发来的这条通讯线2、网线接口正常,在PLC中组态完成后,此处BUSFAULT指示灯熄灭同时RUN指示灯变为绿色3、此处的两个拨码开关S1、S2均拨至上方ON的位置4、此处有两个拨码开关EFIP、AS,用小一字螺丝刀将AS拨至1处5、H1指示灯熄灭三、变频器参数要通过变频器的X44口可以查看参数,也可以进行手动调试(顺时针、逆时针旋转)。
1、通讯参数通讯方式是通过参数P100和p101设置的,其设置如下:2、速度设置由于此款变频器无法通过PLC自由更改速度,只有高速和低速两种速度。
参数P160设置高速运转时的转速,P161设置低速运转时的转速。
另外,参数P301用于限制最低转速,P302用于限制最高转速。
控制字如下图:我们在PLC中分配的I\O变量表是IB300-IB305,QB300-QB305。
DI00 Byte6.6即Q305.6复位,在使用STOP停止变频器后需要通过此位复位;DI01 Byte6.3即Q305.3顺时针,在给START信号之前先选择旋转方向;DI02 Byte6.4即Q305.4逆时针,在给START信号之前先选择旋转方向;DI03 Byte6.1即Q305.1,DI04 Byte6.2即Q305.2 这两个信号点是转台下方的接近开关信号,无需外部给信号;DI05 温度传感器,可以不接;DI10 Byte6.0即Q305.0启动,在DO02为高电平时,且预先选择旋转方向后给高电平脉冲信号后,转台开始旋转;DI11 Byte6.5即Q305.5停止,在需要停止时给此高电平脉冲信号后,转台停止旋转;DI12 Byte6.7即Q305.7高低速选择,高电平时选择高速(P160值),低电平时选择低速(P161值);其他DI信号未使用到。
组态王与ALPHA5000/6000变频器通讯教程(一)打开组态王新建项目(二)选择新建设备————Alpha2点击下一步,填写设备名称()再下一步,选择串口号下一步,填写设备地址,即变频器地址PB.01对应,如果有多台设备相连,要注意地址对应。
下一步,完成,见下图。
(三)选择变量,新建设备变量。
1)控制变量。
变量类型为I/O整数,连接设备为刚才所建对应设备Alpha2,对运行控制指令0001H-0004H读写属性为只写,采集频率为0毫秒(数值有变化时进行写操作),防止频繁更改运行控制指令造成变频器错误运行。
2)寄存器选择4,变量后面地址为变频器说明书中MODBUS地址+1,数据类型为USHORT,其他保持默认即可。
详情见下图图1。
控制变量图13)状态变量读取:阿尔法变频器可以读取的地址包括(0020H-00FEH),功能组参数设定(P0-PE组)。
对于读取变量读写属性必须为只读,地址为437(4寄存器类型,后边数字37=0024H+0001H为实际输出频率对应地址),变量采集频率根据需要设置,但最好不要低于100MS详见下图图2。
实际频率输出图24)状态变量写入:阿尔法变频器,可写入参数地址包括:频率设定(0002H或者0100H),PID设定(0003-0004H),功能组参数设定(P0-PE组)。
以设定频率为例。
修改为P0.00设定频率(MODBUS地址为0100H),读写属性为只写或者读写都可以,由于组态王开始工作时,这种修改数值型参数起始值都为0,所以要把保存数值一项选中。
变量采集频率为0。
详见下图图3。
频率设定图3(四)控制画面设定控制启停:组态一个按钮,在按下时命令窗口写“运行控制=1”即可停止命令:直接在命令窗口写“运行控制=0”即可。
故障复位命令““运行控制=8””数值输入:由于输入0-5000对应0-50.00Hz,所以组态时可以在新建一个内存整数变量,数值输入时先把0.5000的数值存到内存中然后再画面属性——命令语言中添加\\本站点\频率设定=\\本站点\内存频率设定*100;即可。
SIMOVERT基于Drive ES PCS7 V6.1的使用入门 Drive ES PCS7 V6.1 Getting Started for SIMOVERT摘要本文简单介绍了使用Drive ES monitor 对SIMOVERT MASTERDRIVES进行参数化,及在PCS7V6.1SP1下,基于Drive ES PCS7 V6.1对SIMOVERT MASTERDRIVES变频器进行实例组态的过程。
关键词 Drive ES PCS7,SIMOVERT MASTERDRIVES,PCS7,集成DP接口,Y-LinkKey Words Drive ES PCS7,SIMOVERT MASTERDRIVES,PCS7,Integrated DP,Y-LinkA&D Service & Support Page 2-16目录SIMOVERT基于Drive ES PCS7 V6.1的使用入门 (1)1. Drive ES PCS7 功能库简介 (4)2.Drive ES 安装要求 (4)3. 对SIMOVERT MASTERDRIVER参数化 (4)4. Drive ES PCS7 组态过程 (7)5.Drive ES PCS7总结 (13)A&D Service & Support Page 3-161. Drive ES PCS7 功能库简介Drive ES PCS7 是SIEMENS公司专门为PCS7 系统开发的变频驱动器控制功能库,它包含了DRVPCS7 Library(AS)和DRVPCS7 Library(OS)两部分。
此功能库继承了PCS7一贯的简单易懂的编程思想,只需要通过简单的硬件配置及CFC编程,即可完成PCS7系统总对变频驱动器控制的集成,并提供丰富的只能诊断和控制功能。
在操作员站可以通过Drive ES PCS7 集成的面板对变频驱动器的相关过程变量进行监视与操作,Drive ES PCS7 也可以将相关的驱动数据集成到PCS7 资产管理系统中。
功能库中提供如下变频器的控制功能块:9 MASTERDRIVES:SIMO_MD(针对SIMOVERT MASTERDRIVER VC和MC)9 MICROMASTER:SIMO_MM3、SIMO_MM4(针对MICROMASTER 第3和第 4代产品)9SIMOREG DC MASTER:SIMO_DCM(针对SIMIOREG DC Master)9 SINAMICS G/S Serials:SINA_GS(针对SINAMICS S120/150和G130/150)9 VIK/Namur:VIKNAMUR功能库支持德、英、法三种语言。
2.Drive ES 安装要求显示器分辨率:至少1024*768SIMATIC CPU/CP要求:CPU41x-y from V3.1.0 (6ES7 414-3XJ00-0AB0, 6ES7 416-2XK02-0AB0,6ES7 416-3XL00- 0AB0, 6ES7 417-4XL00-0AB0)CPU41x-4H from V3.1.1 (6ES7 414-4HJ00-0AB0, 6ES7 417-4HL01-0AB0)CP443-5ext from V5.1.0 (6GK7 443-5DX03-0XE0)操作系统要求:Windows 2000 、Windows XP professional、Windows 2003PCS7 V6.1 or higher3. 对SIMOVERT MASTERDRIVER参数化在使用 Drive ES PCS7 功能库驱动 SIMOVERT MASTERDIRVER之前,必须对SIMOVERT MASTERDRIVER进行参数化。
参数化有两种方式,一种是通过MASTERDRIVER上自带的面板进行参数设置,另外一种是使用Drive ES Basic软件中的Drive ES monitor对SIMOVERT MASTERDRIVER进行参数化。
关于Drive ES Basic 软件的用法可参考手册Working with Drive ES Basic或参考在线帮助。
下面演示了通过Drive ES Basic软件对SIMOVERT参数化的步骤。
1) 打开PCS7 项目,插入Drive 对象。
A&D Service & Support Page 4-16图1插入Drive 对象2) 选择MASTERDRIVER 类型,并设定从站地址。
图2 设置类型及地址A&D Service & Support Page 5-163) 插入参数表图3 插入参数表4) 打开参数表,进行参数设定。
图4 打开参数表A&D Service & Support Page 6-16图5 设定参数在Drive ES PCS7 中下列参数必须分配给SIMOVERT:P060=4:选择硬件组态功能P918:Profibus 从站地址P060=1:结束硬件组态P053=3 :使能对CBP/2和PMU 的参数化P722.1=10:激活报文故障监视其它参数参见附表1、2、34. Drive ES PCS7 组态过程在对SIMOVERT 参数化之后,可以运行PCS7使用Drive ES 功能库进行编程组态。
下面针对SIMOVERT MASTERDIRVER 在PCS7 中的使用,分两种情况(标准CPU 和冗余CPU)进行具体演示。
1) 标准CPU 集成DP接口或扩展DP接口方式I. 打开PCS7 系统,插入AS 站,进行硬件组态。
选择Drive ES profile下的硬件列表,插入DBP2。
由于SIMOVERT 与CPU 通讯是通过一个安装在SIMOVERT上的Profibus DP 通讯卡来进行的,所以组态时,应插入通讯卡的型号,本例中为CBP。
然后组态DP通讯接口区间。
如图6所示A&D Service & Support Page 7-16图6 接口通信区间设置注意:必须选择PCS7,PZD 6/6,PCS7功能库仅支持PZD通讯方式,且Consistency类型需设置为Entire Length。
接口区间的输入输出映象区起始地址必须相同,此处为IW512/QW512。
II. CFC编程,使用SIMO_MD功能块,如图7所示,连接到地址IW512(接口区首地址),输出地址无需连接,在CFC编译时选择Generate module driver和updatesample time,在CFC编译后,功能块的输出QC会自动与模板驱动相连接。
注意:AC_START设置为1:非循环读取Fault Message。
A&D Service & Support Page 8-16图7 CFC 编程连接III. 插入PC STATION ,编译OS,运行,面板如图8所示,可进行启动停止等操作,可以检测反馈电流,设置转速等。
A&D Service & Support Page 9-16图8 上位机运行状况2) 冗余CPU通讯分两种情况Y-Link 方式在SIMOVERT MASTERDRIVER上插入两块CPB2通讯卡本文只介绍H-CPU通过Y-Link方式与SIMOVERT MASTERDRIVER 通讯I. 打开PCS7 项目,插入 AS 站进行硬件组态,插入Y-Link。
针对SIMOVERT在Y-link后的组态,应选择Standard profile下的CBP2,DP通讯区间选择PPO4,OPKW,6PZD。
A&D Service & Support Page 10-16图9 通信区间设置注意:MASTERDRIVES 在H系统Y-Link后不能选择Drive ES profile下的硬件。
由于PCS7 仅支持PZD方式,且Consistency类型为Total Length,所以只能选择PPO4。
接口区对应的输入输出映象区的首地址必须相同。
II. 在CFC 中插入SIMO_MD功能块,如图10所示。
连接到地址IW512(接口区首地址),输出地址无需连接,在CFC编译时选择Generate module driver和updatesample time,在CFC编译后,功能块的输出QC会自动与模板驱动相连接。
注意:AC_START设置为0:Y-link后不支持非循环读取Fault Message。
A&D Service & Support Page 11-16图10 CFC编程连接III. 插入PC STATION,编译OS,运行。
面板如图11所示,可进行启动停止等操作,可以检测反馈电流,设置转速等。
图11 上位机运行状况A&D Service & Support Page 12-16对于SIMOVERT MASTERDRIVER通过两块CBP2通讯卡与H-CPU 通讯方式,可参考下面的FAQ/cn/view/zh/6945631,当使用H-CPU与SIMOVERTMASTERDRIVER通讯时,通常推荐使用两个CBP2。
5.Drive ES PCS7总结:¾必须严格按照附表1、2、3对SIMOVERT进行参数化,否则PCS7与SIMOVERT将无法正常通讯。
¾硬件组态DP通讯接口区间的输入输出首地址必须完全相同。
¾数据读写使用SFC14/SFC15 以Consistent Data 的方式对数据进行读写操作,以SFB52/SFB53 以Data Record 的方式来对诊断记录进行读写。
因此在PCS7 中无法通过变量监控的方式来对DP 接口的过程映象区进行读写,此方式与使用Step7 编程有所区别。
¾Drive ES PCS7 仅仅支持循环读写过程值,即仅支持PZD 的读写方式,如果需要读写PKW 参数则必须使用Step7 来编程实现。
¾ Ylink 后不支持非循环的Fault Message 的读取,AC_START 需设置为0。
¾从经济上考虑,冗余CPU 与SIMOVERT MASTERDRIVER通讯时,推荐使用两块CBP2通讯卡的方式。
本文档基于如下软件硬件环境进行测试,仅供参考。
软件PCS7 V6.1SP1Drive ES for PCS7 V6.1SP1Operation system Windows XP SP2硬件417-4HL04-0AB0 CPU 6ES7157-0AA82-0XA0 Y-Link 6ES7SIMOVERT MASTERDIRVER 6SE7011-5EP60-ZCBP2 6SE70-090-0XX84-0FF5A&D Service & Support Page 13-16附表1SIMATIC>MASTERDIRVES附表2MASTER>SIMATICA&D Service & Support Page 14-16附表3LOCAL DATAA&D Service & Support Page 15-16附录-推荐网址PCS7西门子(中国)有限公司自动化与驱动集团客户服务与支持中心网站首页:/Service/专家推荐精品文档:/Service/recommend.aspPCS7常问问题:/CN/view/zh/10806846/133000 PCS7更新信息:/CN/view/zh/10806846/133400 Drive西门子(中国)有限公司自动化与驱动集团客户服务与支持中心网站首页:/Service/专家推荐精品文档:/Service/recommend.asp驱动技术常问问题:/CN/view/zh/10803928/133000 “找答案”驱动技术版区:/service/answer/category.asp?cid=1038A&D Service & Support Page 16-16。