加速度计24位置标定
- 格式:doc
- 大小:94.00 KB
- 文档页数:3
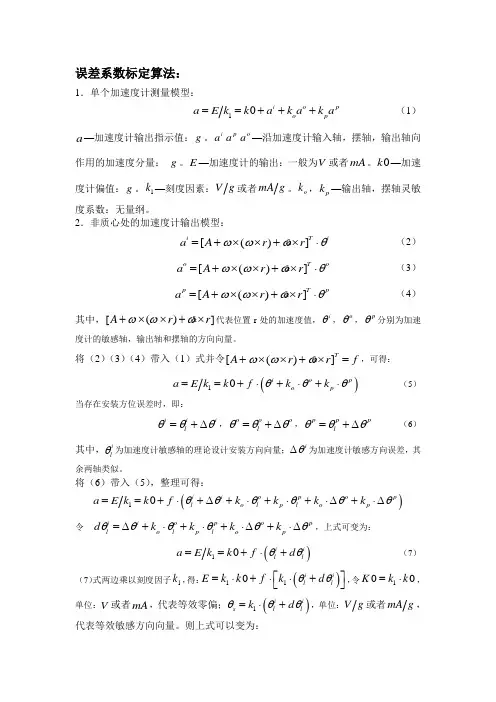
误差系数标定算法:1.单个加速度计测量模型:10i o po p a E k k a k a k a ==+++ (1)a —加速度计输出指示值:g 。
ia pa oa —沿加速度计输入轴,摆轴,输出轴向作用的加速度分量: g 。
E —加速度计的输出:一般为V 或者mA 。
0k —加速度计偏值:g 。
1k —刻度因素:V g 或者m A g 。
o k ,p k —输出轴,摆轴灵敏度系数:无量纲。
2.非质心处的加速度计输出模型:[()]i T ia A r r ωωωθ=+⨯⨯+⨯⋅ (2) [()]o T oa A r r ωωωθ=+⨯⨯+⨯⋅ (3) [()]p T pa A r r ωωωθ=+⨯⨯+⨯⋅ (4) 其中,[()]A r r ωωω+⨯⨯+⨯ 代表位置r 处的加速度值,iθ,oθ,pθ分别为加速度计的敏感轴,输出轴和摆轴的方向向量。
将(2)(3)(4)带入(1)式并令[()]TA r r f ωωω+⨯⨯+⨯= ,可得: ()10iopo p a E k k f k k θθθ==+⋅+⋅+⋅ (5)当存在安装方位误差时,即:i i i l θθθ=+∆,o o ol θθθ=+∆,pppl θθθ=+∆ (6)其中,il θ为加速度计敏感轴的理论设计安装方向向量;iθ∆为加速度计敏感方向误差,其余两轴类似。
将(6)带入(5),整理可得:()10iiopopl o l p l o p a E k k f k k k k θθθθθθ==+⋅+∆+⋅+⋅+⋅∆+⋅∆令 i iopopl o lplopd k kkk θθθθθθ=∆+⋅+⋅+⋅∆+⋅∆,上式可变为:()10iil l a E k k f d θθ==+⋅+ (7)(7)式两边乘以刻度因子1k ,得:()110i il l E k k f k d θθ⎡⎤=⋅+⋅⋅+⎣⎦,令100K k k =⋅,单位:V 或者mA ,代表等效零偏;()1iis l lk d θθθ=⋅+,单位:Vg 或者m A g ,代表等效敏感方向向量。
惯性测量单元误差标定马帅旗【摘要】针对低成本惯性测量单元标定中的速度和精度问题,建立了惯性测量单元的误差模型,提出了一种针对惯性测量单元零偏、标度因数和安装误差角的标定方法.利用6状态法标定出加速度计参数,利用4状态法标定出了陀螺参数.对标定后的惯性测量单元进行试验测试,结果表明,标定后惯性测量单元的测量精度满足预期要求,标定方法正确、有效.%In terms of the issue of precision and calibrated speed in low cost micro inertial measurement unit, an error calibration model of gyroscope and accelerometer was built, and calibration algorithm was pro-posed to compensate for the bias, scale factor and misalignment angle.The accelerator' s parameters were esti-mated by six states method, and gyroscope' s parameters were estimated by four states method, and test exper-iment was carried out after calibrated.The experiment results show that expected precision has been achieved, and the availability and validity of the calibration algorithm was verified.【期刊名称】《陕西理工学院学报(自然科学版)》【年(卷),期】2015(031)005【总页数】6页(P31-35,40)【关键词】惯性测量单元;标定;零偏;标度因数;安装误差【作者】马帅旗【作者单位】陕西理工学院电气工程学院,陕西汉中 723000【正文语种】中文【中图分类】V241惯性测量单元(IMU)是一种由三轴加速度计、三轴陀螺和三轴磁力传感器等组成的惯性测量器件,主要用于测量飞行器3个自由度的角速率、加速度和磁航向等信息。
物理实验技术中加速度计测量与标定技巧加速度计是物理实验中常用的一种仪器,用于测量物体的加速度。
在物理实验中,准确测量和标定加速度计是非常重要的。
本文将介绍加速度计的测量原理以及标定技巧,帮助读者更好地理解和应用加速度计。
一、加速度计的测量原理加速度计是一种用来测量物体加速度的设备,主要通过测量物体的惯性变化来实现。
常见的加速度计有压电式加速度计、光电式加速度计等。
压电式加速度计是利用压电材料的特性实现的。
压电材料在受到力或压力时会产生电荷,从而产生电压信号。
当加速度计受到加速度时,压电材料也会产生变形,并相应地产生电压信号。
通过测量产生的电压信号的大小,即可计算出物体的加速度。
光电式加速度计则是利用光电传感器测量物体的位移变化来实现的。
光电传感器通过光电效应将光信号转化为电信号,当加速度计受到加速度时,物体会发生位移变化,从而导致光电传感器测量到的光信号发生变化。
通过测量光信号的变化,即可计算出物体的加速度。
二、加速度计的标定技巧标定加速度计是为了使其输出的电信号与真实的物体加速度之间有一个准确可靠的对应关系。
下面介绍几种常见的标定技巧。
1. 零点校准零点校准是指在没有受到加速度时,将加速度计的输出调整为零。
可以将加速度计放在静止的平面上进行校准,通过调整仪器上的相关设置使输出为零。
经过零点校准后,可以保证在没有受到加速度时,加速度计的输出为零。
2. 常重校准常重校准是指在受到固定加速度(常重)下,将加速度计的输出调整为一个已知的数值。
首先需要提供一个已知的固定加速度,例如放置在重力水平方向的斜面上,使其受到斜面上固定的加速度。
然后通过调整加速度计的相关设置,使其输出与已知的加速度值相等。
3. 多点标定多点标定是指在多个已知加速度点上进行标定。
可以准备多个已知加速度的实验环境,然后将加速度计分别放置在这些实验环境中进行测量,记录加速度计的输出值。
根据已知的加速度和加速度计的输出值,可以建立起一个加速度与输出值之间的对应关系。
基于CMAES算法的加速度计多位置新型标定方法
仲志丹;张玮琪;杜慧颖
【期刊名称】《智能计算机与应用》
【年(卷),期】2018(008)002
【摘要】针对粒子群优化算法(PSO)和遗传算法(GA)在加速度计标定优化后期出现早熟、陷入局部最优,以及在设计与应用过程中存在的缺陷,将自适应协方差矩阵进化策略(CMAES)算法应用于加速度计的快速标定:采用具有不同函数特征的Sphere、Rastrigin和Rosen三个基准函数对比测试CMAES算法的总体性能;以模观测标定方法为基础建立加速度计标定模型,选取加速度计的24个位置进行仿真观测.实验结果表明:CMAES算法在收敛速度、收敛精度、全局搜索等方面性能优异,将加速度计的标定精度提升了12个数量级,为其它算法标定加速度计奠定了良好基础,对位移系统测量研究具有重要意义.
【总页数】5页(P30-34)
【作者】仲志丹;张玮琪;杜慧颖
【作者单位】河南科技大学机电工程学院,河南洛阳471000;河南科技大学机电工程学院,河南洛阳471000;信息工程大学洛阳校区, 河南洛阳471003
【正文语种】中文
【中图分类】TP181
【相关文献】
1.MEMS三轴加速度计6位置标定方法的研究 [J], 石玺文;李杰;胡陈君;秦丽
2.正交双加速度计两种安装位置在重力场中的标定方法 [J], 董春梅;陈希军;刘庆博;任顺清
3.基于Kalman滤波的加速度计十位置标定方法 [J], 孙枫;曹通
4.基于CMAES算法的加速度计多位置新型标定方法 [J], 仲志丹;张玮琪;杜慧颖;;;
5.基于多位置的MEMS加速度计快速自标定 [J], 王学瀚
因版权原因,仅展示原文概要,查看原文内容请购买。
改进的IMU传感器安装误差正交补偿方法马亚平;魏国;周庆东【摘要】针对传统的正交补偿方法难以保证惯性测量单元具有较高的正交补偿精度的问题,提出了一种改进的适用于大角度和小角度安装误差角情形的正交补偿方法,该方法分别建立三轴加速度计和三轴光纤陀螺传感器的安装误差方程,对惯性测量单元进行速率标定和多位置静态标定,并利用最小二乘法求解惯性测量单元的安装误差方程参数.仿真和实验结果表明:该方法较传统的正交补偿方法具有较高的正交补偿精度和传感器标定精度,且回避了静态标定时在较大安装误差角下利用转位机构获得零偏存在较大误差的问题,大大地提高了标定效率.【期刊名称】《传感器与微系统》【年(卷),期】2016(035)009【总页数】5页(P9-13)【关键词】惯性测量单元;大角度安装误差;正交补偿;最小二乘法【作者】马亚平;魏国;周庆东【作者单位】哈尔滨工业大学自动化测试与控制系,黑龙江哈尔滨150001;哈尔滨工业大学自动化测试与控制系,黑龙江哈尔滨150001;哈尔滨工业大学自动化测试与控制系,黑龙江哈尔滨150001【正文语种】中文【中图分类】TE927捷联惯性系统是将加速度计和陀螺仪组成的惯性测量单元(inertial measurement unit,IMU)直接固连在运载体上(如测斜仪、舰艇和飞机等),根据惯性传感器IMU提供的测量值来解算出运载体的姿态信息[1,2]。
由于IMU本身存在机械加工工艺和安装结构的限制,不可避免地带来IMU传感器之间以及传感器与安装固件之间的非正交误差,这些误差统一称为IMU安装误差。
针对捷联惯性导航系统要求精度较高的情况,需要具有较高的安装误差补偿计算精度[3]。
IMU的标定和安装误差补偿是针对IMU传感器建立相应的数学模型,并进行该数学模型参数计算的过程。
在捷联惯性导航系统的标定过程中,实际IMU传感器坐标系与理想载体坐标系之间存在的安装误差不可忽略。
在传统的IMU传感器正交补偿中,所采用的补偿方法仅仅适用于较小正交误差(通常小于60″),并且使用的正交补偿矩阵对角线元素往往近似为单位1[4,5]。
三轴转台误差对光纤捷联惯组陀螺标定精度的影响胡梦纯;魏莉莉;傅长松【摘要】研究了利用三轴转台标定时,转台不水平度、不正交度、定位精度和惯组与转台坐标系不重合度对光纤捷联惯组中陀螺标定结果的影响.基于更符合工程实际的陀螺组合标定模型,用四元数法建立了转台误差模型,推导了误差传递途径,定量分析12位置法、多速率点速率法标定编排方式下的陀螺标定误差.研究和仿真发现:陀螺零偏误差基本与陀螺测量误差为同一量级,安装系数误差基本与转台不正交度与定位精度的和为同一量级.【期刊名称】《上海航天》【年(卷),期】2015(032)005【总页数】5页(P60-64)【关键词】三轴转台误差;惯性测量单元;陀螺组合;标定误差【作者】胡梦纯;魏莉莉;傅长松【作者单位】上海航天控制技术研究所,上海201109;上海航天控制技术研究所,上海201109;上海航天控制技术研究所,上海201109【正文语种】中文【中图分类】V241.550 引言捷联惯性导航系统的核心是惯性测量单元(IMU),又称捷联惯性组合,简称捷联惯组。
捷联惯组的精度直接影响导航精度,捷联惯导系统误差随时间积累,时间越长,误差就越大,这要求对正在研制和已经定型生产的惯性器件定期进行精确标定。
惯组的标定是进行惯性导航的前提,目的是确定惯导系统的误差模型参数[1]。
在标定过程中,环境、设备等不确定性均会引起标定误差,对标定精度产生影响。
尽管误差处于较小的量级水平,但在高精度运载火箭中,其影响不能忽略,需确定标定误差的大小。
转台误差包括各轴的正交度、相交度、回转精度等[2]。
文献[3]分析了三轴转台误差对加速度计标定系数的影响;文献[4]推导了转台不正交度和不水平度对陀螺标度因数的影响,但未分析零偏;文献[5]对24位置法标定编排及单速率点速率法中的标定误差进行分析。
转台安装误差也会影响标定精度,掌握转台安装误差与标定参数间的定量关系,可为何时对转台对北和调平提供依据[6]。
三轴数字MEMS加速度计现场标定方法彭孝东;张铁民;李继宇;闫国琦【期刊名称】《振动、测试与诊断》【年(卷),期】2014(000)003【摘要】微机电系统(micro electro mechanical systems ,简称MEMS)加速度传感器作为低成本惯性测量单元在物体姿态监测中有着广泛应用。
根据三轴数字加速度传感器的输出数学模型,详细推导了如何计算数学模型中标度因数、安装误差系数以及零偏值。
提出一种基于长方体的六位置简单标定方法,对比三轴转台精确标定结果表明六位置简单标定法简单易行,精度较高,易于单片机实现,适合不具备三轴转台的场所,且该方法对M EM S三轴数字加速度计的校准具有很好的通用性。
【总页数】5页(P544-548)【作者】彭孝东;张铁民;李继宇;闫国琦【作者单位】华南农业大学工程学院广州,510642; 机器人学国家重点实验室沈阳,110016;华南农业大学工程学院广州,510642;华南农业大学工程学院广州,510642;华南农业大学工程学院广州,510642【正文语种】中文【中图分类】V241.4;U666.12【相关文献】1.基于圆球拟合MEMS加速度计零位现场标定技术研究 [J], 周新淳2.微型航姿系统中三轴MEMS加速度计组合误差建模方法 [J], 陆辰;李荣冰;刘建业;杭义军3.MEMS三轴加速度计6位置标定方法的研究 [J], 石玺文;李杰;胡陈君;秦丽4.一种基于改进型自适应遗传算法的MEMS三轴加速度计标定方法 [J], 邹泽兰;徐祥;徐同旭;赵鹤鸣5.基于ACS算法的MEMS加速度计现场标定方法 [J], 乔美英;高翼飞;李宛妮;赵岩因版权原因,仅展示原文概要,查看原文内容请购买。
一种基于六姿态模型的加速度计校准方法研究张文瑞;张丕状;翟子雄【摘要】MEMS加速度计和陀螺仪是惯性导航系统的重要测量组件.为提高惯性导航系统的测量精度,在使用加速度计前需要对其各项参数进行标定.在构建了一种理想的三轴MEMS加速度传感器输出与重力加速度值、零偏、标度因子之间的模型基础上,根据加速度计在静止状态下重力加速度在各轴分量的模值与重力加速度的关系,提出了一种零偏和标度因子的六姿态校准方法,并建立了标定方程.以MPU6050加速度陀螺仪为例,通过实验验证了该方法的正确性.结果表明:通过该校准方法可以有效地提高加速度传感器的零偏和标度因子技术指标精度.【期刊名称】《传感器与微系统》【年(卷),期】2016(035)003【总页数】4页(P37-39,48)【关键词】MEMS加速度计;零偏;标度因子;姿态校准【作者】张文瑞;张丕状;翟子雄【作者单位】中北大学仪器科学与动态测试教育部重点实验室,山西太原030051;中北大学仪器科学与动态测试教育部重点实验室,山西太原030051;中北大学仪器科学与动态测试教育部重点实验室,山西太原030051【正文语种】中文【中图分类】V249MEMS惯性器件以其结构简单、低成本、小体积等优势在太空、工业机器人及汽车领域取得了广泛的应用。
但是MEMS惯性器件的精度指标与其他同类传感器的精度相比要低得多,制约了它的进一步的应用。
目前,对三轴零偏和标度因子进行校准已经成为一个研究热点[1,2]。
MEMS加速度计的主要技术指标有零偏和标度因子。
由于批量生产工艺等方面的原因,产品的一致性不易精确控制,厂家给出的技术指标较低,难以满足一些高精度测量的需要,故对加速度计的各项系数进行标定非常重要。
目前普遍采用三轴转台上进行标定陀螺和加速度计[3],大量的研究集中在标定算法的解算上[4]。
这些方法以精密转台为实验平台,进行翻滚获取被标定传感器的实验数据,利用转台上的参考加速度计的姿态指向等信息,通过各种解算算法完成传感器标定。
基于改进六位置法的一种MEMS加速度计标定补偿方案向高林;路永乐;刘宇;龚大伟;吕玲;吴林志【期刊名称】《重庆邮电大学学报(自然科学版)》【年(卷),期】2017(029)001【摘要】微机电系统(micro electronic mechanical system,MEMS)加速度计在测量过程中受安装误差、刻度因子及零偏影响,为提高MEMS加速度计的测量精度,在六位置法标定的基础上,提出一种改进的MEMS加速度计标定补偿方案.利用小波滤波对MEMS加速度计的原始测量值进行滤波,运用六位置法对6个位置的原始数据进行标定得到补偿模型.通过实验验证,MEMS加速度计测量精度由标定前的1.2 m/s2提高到0.01 m/s2,由MEMS加速度计解算的横滚角和俯仰角精度由标定前的1°提高到0.166 4°.【总页数】6页(P62-67)【作者】向高林;路永乐;刘宇;龚大伟;吕玲;吴林志【作者单位】重庆邮电大学光电信息感测与传输技术重庆市重点实验室,重庆400065;重庆邮电大学光电信息感测与传输技术重庆市重点实验室,重庆400065;重庆邮电大学光电信息感测与传输技术重庆市重点实验室,重庆400065;重庆邮电大学光电信息感测与传输技术重庆市重点实验室,重庆400065;重庆邮电大学光电信息感测与传输技术重庆市重点实验室,重庆400065;重庆邮电大学光电信息感测与传输技术重庆市重点实验室,重庆400065【正文语种】中文【中图分类】TN212【相关文献】1.一种改进 MEMS 加速度计标定补偿方法 [J], 刘宇; 曹原2.一种基于改进型自适应遗传算法的MEMS三轴加速度计标定方法 [J], 邹泽兰;徐祥;徐同旭;赵鹤鸣3.基于多位置的MEMS加速度计快速自标定 [J], 王学瀚4.MEMS加速度计混合误差标定补偿方案 [J], 刘宇;余跃;路永乐;邸克;郭俊启5.基于Kalman滤波和六位置法的加速度计标定补偿 [J], 刘宇;季廷洪;向高林;张欣;龚爽;宁莉莎因版权原因,仅展示原文概要,查看原文内容请购买。
12位置法 imu标定12位置法(12-point calibration)是一种用于惯性测量单元(Inertial Measurement Unit,简称IMU)标定的方法。
IMU是一种能够测量物体加速度和角速度的装置,广泛应用于航空航天、导航、机器人等领域。
在实际应用中,IMU的准确度对于测量结果的精度和可靠性至关重要。
因此,通过进行标定来修正IMU的误差是必不可少的。
12位置法是一种基于位置变化的标定方法。
它的原理是在不同的位置和姿态下,通过记录IMU的输出数据,利用数学模型计算出IMU 的误差参数。
具体步骤如下:第一步,确定位置:在标定过程中,需要选择一系列不同的位置和姿态。
这些位置应该尽可能地覆盖整个测量空间,并且需要保证在这些位置下IMU的输出数据是可靠和准确的。
第二步,收集数据:在每个位置和姿态下,将IMU固定在物体上,收集IMU的输出数据。
这些数据包括加速度计和陀螺仪的测量值。
为了提高测量精度,通常需要多次重复测量,并取平均值。
第三步,建立数学模型:利用收集到的数据,建立IMU的误差模型。
这个模型可以通过线性回归、最小二乘法等数学方法来求解。
根据模型求解出的参数,可以修正IMU的输出数据。
第四步,计算误差参数:根据数学模型,计算出IMU的误差参数。
这些参数包括零偏、尺度因子、非正交性等。
这些参数可以用于修正IMU的输出数据,提高测量的准确度和精度。
第五步,验证标定结果:对于标定结果的准确性和可靠性,需要进行验证。
可以使用一些已知的准确测量值来比较标定后的测量结果,以确保标定的有效性。
12位置法作为一种常用的IMU标定方法,具有以下优点:1. 精度高:通过在不同位置和姿态下进行标定,可以更全面地考虑IMU的误差特性,提高测量的准确度和精度。
2. 可靠性强:通过多次重复测量,并取平均值,可以减小随机误差的影响,提高标定结果的可靠性。
3. 适用范围广:12位置法适用于各种类型的IMU,无论是MEMS (Micro-Electro-Mechanical Systems)还是光纤陀螺等。
加速度计标定方法(一)加速度计标定标定是指校准传感器以确保其准确度和可靠性的过程。
在加速度计(accelerometer)使用过程中,进行加速度计标定是非常重要的一步,它能够提高测量结果的准确性。
本文将介绍几种常见的加速度计标定方法,以帮助读者更好地理解和应用加速度计。
方法一:零偏标定(Zero Offset Calibration)零偏标定主要是通过采集静态状态下的数据进行校准,步骤如下:1.将加速度计放置在稳定的平面上,确保不发生位移。
2.采集一段时间的数据,通常在几秒钟到一分钟之间。
3.计算采集到的数据的平均值,并将其作为零偏值。
方法二:尺度因子标定(Scale Factor Calibration)尺度因子标定方法可以校准加速度计的感受性(sensitivity),即加速度计输出和实际加速度之间的比例关系。
下面是一种常见的尺度因子标定方法:1.加速度计放置在重力加速度已知的平面上。
2.测量加速度计输出的数值,并将其除以已知的重力加速度,得到尺度因子。
3.重复上述步骤多次,并计算尺度因子的平均值。
方法三:轴对齐标定(Axis Alignment Calibration)轴对齐标定用于校准加速度计的坐标轴与参考坐标系之间的偏移。
通常,加速度计的坐标轴与参考坐标系的三个轴并不完全对齐,因此需要进行轴对齐标定。
以下是一种常用的轴对齐标定方法:1.放置加速度计在一个固定的平面上,该平面的方向与参考坐标系的一个轴尽可能保持一致。
2.通过施加静态的加速度(例如,旋转平面)或应用静态的力对加速度计进行刺激。
3.记录加速度计的输出并分析数据,计算出与参考坐标系的轴对齐的偏移量。
方法四:温度补偿标定(Temperature Compensation Calibration)温度补偿标定用于校准加速度计在不同温度下的输出变化。
由于温度会对加速度计的性能产生影响,因此温度补偿标定是非常重要的。
以下是一种常用的温度补偿标定方法:1.在不同温度下,分别对加速度计进行静态状态下的测量。
imu标定方法
imu标定是指对惯性测量单元(IMU)进行精确校准,以确保其测量结果的准确性和稳定性。
IMU是一种集成了加速度计、陀螺仪和磁力计等传感器的装置,用于测量物体的加速度、角速度和方向信息。
IMU标定的目的是消除传感器的误差,使其输出的测量结果更加准确。
标定过程通常包括以下几个步骤:
1. 加速度计标定:加速度计常常存在漂移和非线性误差。
在标定过程中,需要将IMU放置在不同的位置和方向,通过与重力加速度的比较来校准加速度计的零偏和比例因子。
2. 陀螺仪标定:陀螺仪也存在漂移和非线性误差。
在标定过程中,需要将IMU 放置在静止和旋转的状态下,通过与已知旋转速度的比较来校准陀螺仪的零偏和比例因子。
3. 磁力计标定:磁力计容易受到外部磁场的干扰,因此需要进行磁力计校准来消除这些干扰。
标定过程中,需要将IMU在不同方向下移动,通过与已知地磁场的比较来校准磁力计的零偏和比例因子。
除了上述传感器的标定,还可以对温度、偏航角等进行标定,以进一步提高IMU 的测量精度。
IMU标定通常需要使用专业的标定设备和算法来实现。
例如,可以使用机械平台来控制IMU在不同的姿态下进行标定,同时使用最小二乘法等算法来进行误差估计和校准参数的求解。
IMU标定的结果对于定位、导航和姿态估计等应用非常重要。
准确的IMU测量结果可以提高飞行器、机器人等系统的运动控制和路径规划的精度,从而提升整个系统的性能和可靠性。
总之,IMU标定是一项重要的工作,通过消除传感器误差和干扰,可以提高IMU 的测量精度,进而提高相关应用的性能。
加速度计标定实验
1加速度计的数学模型
0)/cos(,)cos(,)cos(,)(j j x y z j j x j y j z K K A A A N -=++
其中:
j=x/y/z ;
j N 为加速度计的输出;
0j K 为加速度计的零偏;
//x y z A 为加速度计在理想坐标系下敏感的加速度;
)//,cos(z y x j 为加速度计为i 轴与其他两轴加速度计的交叉耦合角的方向余弦。
2加速度计标定方法-“六位置24点标定”
六位置指x/y/z 轴加速度计的输入轴分别指向上和下,共为六个位置,在每个位置绕铅垂线转一圈,间隔90º转动4个点,共为24点。
在每个点采集n 数据,求取平均值作为这个点的采集数值:
n i z y x N j z y x M n
i /)),//(((),//(1∑==,j=1…24。
对每个位置四个点的值求平均,为该位置的加速度计的输出值。
如x 轴加速度计在六个位置采集地数据为:
∑==41
)
,()1,(i i x M x F ;
∑==85
),()2,(i i y M x F ;
∑==12
9
),()3,(i i z M x F ;
∑==1613
),()4,(i i x M x F ;
∑==20
17
),()5,(i i x M x F ;
∑==24
21),()6,(i i x M x F 。
y 轴和z 轴的数据处理方法和x 轴的相同。
加速度计的零偏:
0((,1)(,2)(,3)(,4)(,5)(,6))/6j F j F j F j F j F j F j K =+++++
(j=x/y/z )
j 轴加速度计标度因数的分当量为:
((1,)(2,))/2*xj F j F j g K =-
((3,)(4,))/2*yj F j F j g K =-
((5,)(6,))/2*zj F j F j g K =-
j=x/y/z ,j 轴加速度计的标度因数为j K =交叉耦合角的方向余弦为:
cos(,)/xj j j x K K =
cos(,)/yj j j y K K =
cos(,)/zj j j x K K =
3误差的补偿
加速度计的输出补偿:
在t 时刻采集到三只加速度计的输出值为:123,,N N N ,有以下三个方程:
1011()/cos(1,)cos(1,)cos(1,)
x y z N K K A x A y A z -=++
2022()/cos(2,)cos(2,)cos(2,)x y z N K K A x A y A z -=++
3033()/cos(3,)cos(3,)cos(3,)x y z N K K A x A y A z -=++
其中Ax, Ay, Az 为理想坐标系中的三轴加速度计敏感的加速度,是要求的未知量。
上面的方程组可以简化为
j N CA =
[]101120223033()/()/()/j N N K K N K K N K K =---
⎥⎥⎥⎦
⎤⎢⎢⎢⎣⎡=),3cos(),3cos(),3cos(),2cos(),2cos(),2cos(),1cos(),1cos(),1cos(z y x z y x z y x C x y z A A A A ⎡⎤=⎣⎦
1j A C N -=
4 标定自检
原理: 利用当地重力加速度标定后的性能进行鉴定。
考核加速度计组合对重力加速度的判断能力,对三个加速度敏感轴,在同样时间t 间隔内进行采样,获取t 时刻的加速度输入:
()A t =此时()A t 与当地G 的差值即代表组合在此刻对加速度的测量精度。
5实验与结论
采用三轴加速度计对24位置三轴比力信息进行采集,采用24位置标定方法对三轴加速度计进行标定。
经计算标定结果如下:
零偏:-0.0096 -0.0036 0.0016
标度:9.7573 9.7733 9.7780
误差补偿矩阵:1.0000 0.0046 0.0005
-0.0038 1.0000 -0.0022
0.0000 0.0020 1.0000。