面三维激光扫描仪的检校与精度评估
- 格式:pdf
- 大小:202.89 KB
- 文档页数:10
地面三维激光扫描仪的检校与精度评估摘要:本文针对地面三维激光仪的各项指标提出系统的检校方法,并据此得到地面三维激光扫描仪器精度评估结果,为后期的工程应用提供精度依据和质量控制。
为此,首先针对激光扫描仪的特点,建立各种误差源的误差模型,围绕常规工程关心的精度指标,完成对仪器整体的检校和精度评定。
关键词:地面三维激光扫描仪;检校;精度评估引言在地面三维激光的应用中,扫描仪的测量精度起着重要的角色,尤其在一些工程建设和变形监测中,为了使点云数据达到最大精度,必须进行扫描仪的检校。
若因使用时的外力碰撞和其他未知因素造成仪器内部构造发生变化,则扫描结果可能含有系统性误差。
1、概述三维激光扫描测量系统,也称为三维激光成图系统,主要由三维激光扫描仪和系统软件组成,其工作目标就是快速、方便、准确地获取近距离静态物体的空间三维模型,以便对模型进行分析和处理。
激光扫描仪所获得的数据是由离散的三维点构成的点云。
点云的每一个像素包含有一个距离值和一个角度值。
三维激光扫描技术获取的点云数据,可以达到毫米级的采样间隔,从而激光扫描技术可以应用于工程测量、古建筑和文物保护、数字城市等领域,并已有许多成功例子。
然而,三维激光扫描仪在使用过程中,对于仪器的精度和指标都有严格的研究。
事实上,三维激光扫描仪的分辨率、回波、时间和大气影响等都是影响点云精度的误差来源。
通常情况,仪器与被测点的距离越近,激光光斑越小,分辨率越高,回波信号越强,相应的测量精度就越高,反之,则测量精度越低。
此外,回波还受目标材质的反射率和边缘效应影响。
而温度的变化也可令某种激光扫描仪测距结果在x,y方向产生偏移。
现有关于地面三维激光扫描技术的研究较多集中在逆向工程中的应用及数据处理,然而地面三维激光扫描技术的精度以及对工程应用的影响是实际工程中需要面对的重要问题,激光扫描测量仪器的精度也影响三维点云模型的建立和应用,因此地面三维激光扫描仪的检校与精度评估对于三维激光扫描仪的有效应用是十分必要的。

第33卷第11期传感技术学报Vol.33No.11 2020年11月CHINESE JOURNAL OF SENSORS AND ACTUATORS Nov.2020 Error Analysis and Calibration of Terrestrial3D Laser Scanner"XIA Guisuo1,NIU Zhisheng2,LIU Fang1,FU Yanjun1(1. Ministry of Education Key Laboratory of Nondestructive Testing, Nanchang Hangkong University,Nanchang Jiangxi330063 ,China;2.Hebei Special Equipment Supervision and Inspection Institute Handan Branch,Handan Hebei056000,China)Abstract:A calibration method based on distance error identification was proposed for ground3D laser scanner.The structure and optical system of the instrument were introduced,and various system errors of the instrument were analyzed,and the error correction algorithm was designed.In the calibration process,multiple targets were arranged in a large range,and the space coordinates of the targets were measured at different positions from the targets by the terrestrial3D laser scanner.Then the distance between any two targets were calculated,and the instrument correction parameters were identified according to the calibration algorithm.The calibration method neither to obtain the spatial coordinates of the target,nor to perform the conversion between the scanner coordinate system and the world coordinate system can greatly reduce the number of calibration parameters.The calibration test and the accuracy verification test showed that the measurement accuracy of the points near10m,20m,and30m from the instrument were respectively±2.7mm,±2.9mm,±4.1mm,and met the accuracy index requirements of±(2+L/10000)mm.The calibration method was easy to operate,had low requirements for calibration conditions,and had strong practicability. Key words:terrestrial3D laser scanner;calibration;distance;targets;parameter identificationEEACC:7230doi:10・3969/j・i s sn.1004-1699・2020・11・014地面三维激光扫描仪误差分析及标定*夏桂锁",牛志盛2,刘芳打伏燕军1(1.南昌航空大学无损检测教育部重点实验室,江西南昌330063;2.河北省特种设备监督检验研究院邯郸分院,河北邯郸056000)摘要:提出一种基于距离误差辨识的地面三维激光扫描仪标定方法。
地面三维激光扫描仪变形精度试验研究地面三维激光扫描仪是近些年发展速度较快的一种测量仪器,具有诸多的优点,在数据监测方法有着较大的优势。
本文结合笔者工作经验,通过介绍地面三维激光扫描仪的数据获取方法,重点探讨了三维激光扫描仪变形精度评估工作,以供类似研究工作参考。
标签:三维激光扫描点云数据测量数据精度评估随着我国科学技术的快速发展,激光扫描技术得到进一步的提高,高端的三维激光扫描仪器逐渐进入普通人的视野。
地面三维激光扫描仪是近年来出现的一种新型仪器,在国内越来越引起研究领域的关注。
它具有高精确、快速、无接触测量等优点,可以以无接触形式快速获取地球表面及其上面各种目标海量的三维点云数据,这使得三维激光扫描仪的应用领域由传统的建筑、制造和室内设计向工程测量、变形监测等测绘领域逐渐发展。
目前,在三维激光扫描仪应用于变形监测工作当中,许多新的技术方法、数据处理研究方法需要随之跟上,如何利用好这项先进的技术做变形监测工作也成为测量人员有待深入研究的话题。
本文针对三维激光扫描仪变形精度研究进行探讨,希望对推广这项技术的应用有所帮助。
1数据获取方法本实验采用索佳精密监测全站仪SOKKIANET1和徕卡三维激光扫描仪LeicaScanStation2来获取被监测对象的变形数据。
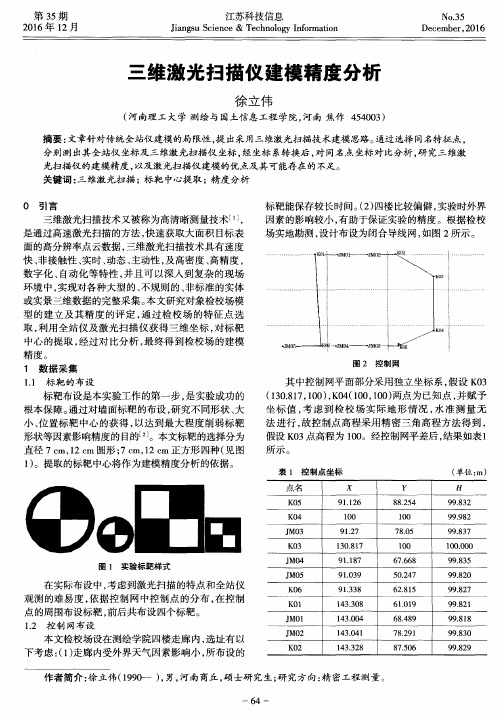
数据获取流程为:(1)进行现场踏勘,(2)布设控制点和标靶点,如图1所示。
其中A、B、C和D为变形监测控制点,是稳固不变的点,用于将扫描的点云数据从仪器独立坐标系转换到测量坐标系或局部坐标系下面,同时,它们也可以作为标靶点用来做拼接使用;1~8号点是布设在变形体表面的标靶点,一是点云配准使用,二是作为变形体变形特征点使用(用于分析变形量及其精度评价)。
以上准备工作完成之后,接下来进行三维点云数据的获取。
SOKKIANET1全站仪集成了全站仪的最新技术,最小距离显示为0.1mm。
在无棱镜的条件下,其测量精度也达到了1mm的量级。
LeicaScanStation2的单点定位精度(50m距离)形成模型表面的精度±2mm,标靶获取精度±1.5mm。
三维激光扫描仪测量误差来源及精度分析[摘要] 本文首先介绍了三维激光扫描测量原理,进而分析了测量的误差来源,仪器误差,与目标物体反射面有关的误差和外界条件影响,最后对扫描精度做了分析。
[关键词] 三维激光扫描测量误差精度[Abstract] This article first introduces the measurement principle of the 3D laser scanning. After considered the effects in the ways of instrument,reflector and scanning environment,making a accuracy analysis of it.[Key words] 3D laser scanner surveying error accuracy0.引言三维激光扫描技术是继GPS空间定位技术后的又一项测绘技术革新,将使测绘数据的获取方法、服务能力与水平、数据处理方法等进入新的发展阶段[1]。
传统的大地测量方法,如三角测量方法,GPS测量都是基于点的测量,而三维激光扫描是基于面的数据采集方式。
三维激光扫描获得的原始数据为点云数据。
点云数据是一切后续工作的基础,在数据采集过程中不可避免地会带有误差,为了提高点云数据质量,需要对误差来源进行详细的分析。
1997年wallace等人研究了三角激光扫描仪的深度图像测量原理,并通过实验验证了扫描物体的移动能导致深度图像测量的系统性误差[2]。
2000年吴剑锋等人详细分析了激光三角法测距的误差[3]。
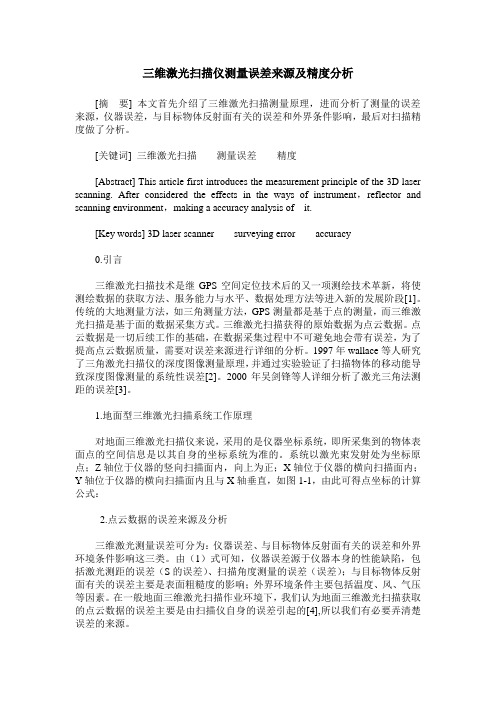
1.地面型三维激光扫描系统工作原理对地面三维激光扫描仪来说,采用的是仪器坐标系统,即所采集到的物体表面点的空间信息是以其自身的坐标系统为准的。
系统以激光束发射处为坐标原点;Z轴位于仪器的竖向扫描面内,向上为正;X轴位于仪器的横向扫描面内;Y轴位于仪器的横向扫描面内且与X轴垂直,如图1-1,由此可得点坐标的计算公式:2.点云数据的误差来源及分析三维激光测量误差可分为:仪器误差、与目标物体反射面有关的误差和外界环境条件影响这三类。

3D扫描和测量的精确性评估
介绍
本文档旨在评估3D扫描和测量的精确性。
我们将探讨3D扫描和测量的定义、原理以及精确性评估的常见方法。
该评估对于确保3D扫描和测量的可靠性和准确性至关重要。
3D扫描和测量的定义
3D扫描和测量是一种技术,通过捕捉物体的三维表面,并将其转换为数字模型,以实现精确测量和分析。
该技术广泛应用于建筑、工程、制造和医学领域等。
3D扫描和测量的原理
3D扫描和测量的原理基于光学、激光或摄像机等技术。
通过对物体表面进行扫描或测量,采集大量数据点,并使用算法将其转换为三维模型。
这些数据点的准确性和稳定性直接影响到最终模型的精确性。
精确性评估的方法
为了评估3D扫描和测量的精确性,我们可以采用以下常见方法:
1. 绝对测量:使用标准参考物体进行测量,比较实际尺寸与扫描结果之间的误差。
2. 相对测量:对同一物体进行多次测量,比较不同结果之间的一致性和准确性。
3. 点云对比:将多个扫描数据集进行对比,查看数据之间的差异。
4. 反向工程:将扫描结果与设计模型进行比较,评估其一致性和准确性。
5. 影响因素分析:分析可能影响测量精确性的因素,如光照条件、扫描距离等。
结论
3D扫描和测量的精确性评估是确保数据的准确性和可靠性的重要步骤。
通过采用绝对测量、相对测量、点云对比、反向工程和影响因素分析等方法,我们可以评估3D扫描和测量的精确性,以确保其在实际应用中的可靠性。
三维扫描仪精度测试方法一.测试原理使用被评价的三维扫描仪对标准样件(见附录A)进行三维扫描获得三维扫描数据;对三维扫描数据和真值进行偏差分析,从几何尺寸偏差和3D偏差两个层面评价三维扫描仪的扫描精度。
二.测试特性1、几何尺寸偏差分析用三坐标测量机对标准样件进行测量得到真值;用三维扫描仪扫描标准样件得到三维扫描数据;对三维扫描数据的几何尺寸进行测量,并计算测量值与真值的偏差,即为几何尺寸偏差。
2、3D偏差分析经三坐标测量机对标准样件加工精度进行确认后,以标准样件的三维设计数据作为3D偏差分析的真值,并与标准样件的三维扫描数据进行3D偏差分析,得到平均距离、均方根误差。
三.测试数学模型平均值衡量正确度,见式(1);标准差衡量精密度,见式(2);均方根误差衡量形态精度,见式(3)。
注1:正确度对应多次测量结果中,几何尺寸偏差的平均值以及3D偏差分析中平均距离的平均值。
注2:精密度对应多次测量结果中,几何尺寸偏差的标准差以及3D 偏差 分析中平均距离的标准差。
注3:形态精度对应多次测量结果中,3D 偏差分析中均方根误差平均值。
(1) 平均值衡量正确度公式:%=y n X 、(2) 标准差衡量精密度公式:(3) 均方根误差衡量形态精度公式:/ Vn (xj —Xi_ac t u ai)2 勺乙i=o- 式中:Xj ------- 测量值,单位为毫米(mm);^i-actual ----------------------- 真实值,单位为毫米(mm);n ----- 测量次数,不少于10次;% ——平均值,单位为毫米(価); RMSe =S ——标准差,单位为毫米(nun);RMSe ——均方根误差,单位为毫米(mm)。
四.测试步骤1、制备特定的标准样件,见附录A。
2、使用三坐标测量机对标准样件进行测量得到其几何尺寸真值,并对加工精度进行确认。
3、用待评价的三维扫描仪直接扫描标准样件得到三维扫描数据。
4、将三维扫描数据进行几何尺寸测量,并与真值对比,得到几何尺寸偏差。
地面三维激光扫描仪精度评估王军;李仲勤【摘要】文中针对地面三维激光扫描仪的水平角、测距精度的问题,采用徕卡全站仪TCR 1202与Z+FIMAGER 5010C三维激光扫描仪进行精度的对比检测.在10 m、20 m、40 m、60 m、80 m、100 m距离段检测三维激光扫描仪的测距精度.随着测距距离的增加,三维激光扫描仪的测距精度在整体上呈逐渐下降的趋势.在20 m、40 m距离下分析了三维激光扫描仪的水平角精度,水平角精度符合标称精度.【期刊名称】《矿山测量》【年(卷),期】2019(047)002【总页数】5页(P79-83)【关键词】地面三维激光扫描仪;距离;水平角;测距;精度【作者】王军;李仲勤【作者单位】兰州交通大学测绘与地理信息学院,甘肃兰州 730070;甘肃省地理国情监测工程实验室,甘肃兰州 730070;兰州交通大学测绘与地理信息学院,甘肃兰州730070;甘肃省地理国情监测工程实验室,甘肃兰州 730070【正文语种】中文【中图分类】P235随着空间数据的发展潮流,地理空间数据在向大数据、高精度、可视化方向迅速发展。
由于在一些工程中,传统测绘仪器无法直接测量或者为了对保护性建筑降低二次伤害,三维激光扫描仪的应用解决了这些数据的采集问题[1]。
三维激光扫描仪在获取物体的三维空间坐标时,无需接触就能采集三维坐标,又能通过相应的软件进行三维建模生成三维模型,被称为“实景复制技术”[2-3]。
地面三维激光扫描系统测量精度评估和检定对于点云数据质量和工程应用成果质量的控制至关重要。
谢宏全等采用徕卡C10三维激光扫描仪对测距精度进行研究分析[4];徐寿志等对Riegl VZ-1000三维激光扫描仪进行精度评定[5]。
本文以三维激光扫描仪的扫描误差来源分析为基础,以Z+F5010C地面三维激光扫描仪为研究对象,以直接比较的方法研究了地面三维激光扫描仪水平角与测距误差规律。
1 地面三维激光扫描仪系统地面三维激光扫描系统由三维扫描仪、系统软件、电源以及附属设备构成。