- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
.
6.2 输入引起的稳态误差
6.2.1 误差传递函数与稳态误差
➢单位反馈控制系统
输入引起的系统的误差传递函数为
E(s) 1 Xi(s) 1G(s)
则
E(s) 1 1G(s)
Xi(ቤተ መጻሕፍቲ ባይዱ)
X i s
E(s)
G(s)
X o s
图6-2 单位反馈系统
根据终值定理 e ss lt ie m (t) ls i0s m (E s) ls i0s m 1 G 1 (s)X i(s)
sX X o IIssX Yo ssH 1 s
EsH1sXisXos
及
H 1 ssH 1 sXisXos
(6-3) (6-4)
比较(6-3)和(6-4)两式,求得误差信号与偏差信号之间的关系为
Es
s Hs
.
对于实际使用的控制系统来说,H(s)往往是一个常数,因此通常误差 信号与偏差信号之间存在简单的比例关系,求出稳态偏差就得到稳 态误差.对于单位反馈系统H(s)=1来说,偏差信号与误差信号相同, 可直接用偏差信号表示系统的误差信号.这样,为了求稳态误差,求 出稳态偏差即可.
小结
(1)位置误差、速度误差、加速度误差分别指输入是阶跃、斜坡、 匀加速度输入时所引起的输出位置上的误差. (2)表6-1概括了0型、I型和II型系统在各种输入量作用下的稳态偏 差.在对角线上,稳态偏差为无穷大;在对角线下,则稳态偏差为零. (3)静态误差系数Kp,Kv,Ka分别是0型、I型、II型系统的开环静态放 大倍数,而v=0,1,2则表示系统中积分环节的数目. (4)对于单位反馈控制系统,稳态误差等于稳态偏差. (5)对于非单位反馈控制系统,先求出稳态偏差εss后,再按下式求出 稳态误差
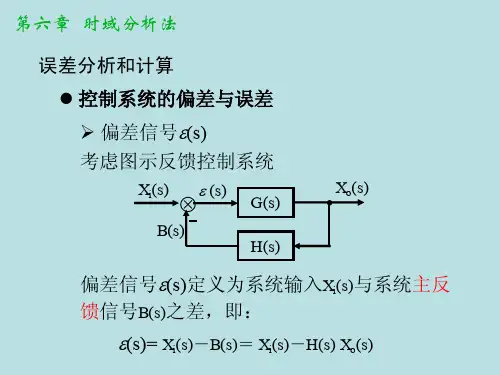
控制系统的方块图如图6-1所示.实线部分与实际系统有对应关系, 而虚线部分则是为了说明概念额外. 画出的.
控制系统的误差信号的象函数是 E ( s )s X is X o s (6-1)
而
偏差信号的象函数是 (s)X is Y s
(6-2)
考虑Xi(s)与Y(s)近似相等,且Y(s)=H(s)Xo(s),得
(s)
X i s
(s)
Y (s)
G(s)
H (s)
X o s
图6-3 非单位反馈系统
根据终值定理 稳态 s sl t i偏 ( t m ) l s 0 ism 差 ( s ) l s 0 is 1 m G ( 1 s ) H ( s )X i( s )
稳态 e ss l误 s i0s m H 1 (s 差 )1 G (1 s)H (s)X i(s)
X N oss1G 1sG G 22 ssHs
所以干扰引起的稳态偏差为: (s) H (s)1 G 1 s G G 22 ssH sN s
.
干扰引起的偏差为:
s1G 2 G (2 s()G s)1 H ssH sN s
根据终值定理,干扰引起稳态偏差为:
ss lt im t ls i0s m s
对于Ⅰ型或高于Ⅰ型以上系统
K p ls i0s K m ((T 1 1 s s 1 1 ))T (2 (2 s s 1 1 )) ((T m ns s 1 1 ) )
ss 0
.
(2) 静态速度误差系数Kv
当系统的输入为单位斜坡信号时r(t)=t·1(t),即R(s) s12,则有
n
G(s)
n2
ss2
n
2 s21n s
1
单位阶跃: 单位斜坡:
ess 0
ess
1 Kv
1 2 K n
单位加速度: ess
.
上述结论是在阶跃、斜坡等典型输入信号作用下得到的,但它有普遍的实用意义. 这是因为控制系统输入信号的变化往往是比较缓慢的,可把输入信号在时间t=0附 近展开成泰勒级数,这样,可把控制信号看成几个典型信号之和,系统的稳态误差可 看成是上述典型信号分别作用下的误差总和.
一般情况下,H为常值,故这时:
e ss
.
ss
H
例6-1 某反馈控制系统如图6-4,当xi(t)=1(t)时,求稳态误差.
解:该系统为一阶惯性系统,系统稳定.误差传递函数为:
Es 1 1 s
Xi(s) 1G(s) 110 s10 s
而
X
i
(s)
1 s
则
e ss ls i0s m s s1X 0 i(s) ls i0s m s s11 s0 0
差
ess1
lims 1 s0 1K1
K2 s
10 s
- K2
再求干扰引起的稳态误差
ess2
lims s
s0
1K1
K2 s
11
s K1
所以,总误差为
esses1 sess20.-K 11K 11
例6-4 某直流伺服电动机调速系统如图6-9所示,试求扰动力矩N(s)引起的稳态误差.
解:首先应选择合适的G1(s)使系统稳定.Kc是测速负反馈系数,这是一个非单位反 馈的控制系统,先求扰动作用下的稳态偏差,再求稳态误差ess.
设G1(s)=1,系统是一阶的,因此稳定.图6-9中,R是电动机电枢电阻,CM为力矩系 数,N是扰动力矩,干扰作用为一个常值阶跃干扰,故稳态偏差为
- K2Kc
ssls i0ms1TKM1sK2K 1c
NR K2Kc C . Ms 1K1K2Kc
NR CM
TMs1
则稳态误差为 essKscs1KK 1K 22Kc C NMR
xt
xnaxan
n0 n!
.
例:系统结构如图所示,求当输入信号r(t)=2t+t2时,系统稳态误差ess.
解:首先判别系统的稳定性.由开环传递函数知,闭环特征方程为
D (s) 0 .1 s3 s2 2s 0 2 0 0
根据劳斯判据知闭环系统稳定.
第二步,求稳态误差ess. 因为系统为Ⅱ型系统,根据线性系统的奇次性和叠加性,有
当K1K2KC>>1时,
ess
1 K1Kc
NR CM
可见,反馈系数越大,则误差越小;干扰量越小,则误差越小;扰动作用点
与偏差信号间的放大倍数越大,则误差越小.
为了进一步减少误差,可让
G1s1
K3 s
,称为比例加积分控制.
选择K3,使系统具有一定的稳定裕量,同时,其稳态偏差为
- K2Kc
ss
lims
TMs1
其中,K p l s 0 iG ( m s )H s G ( 0 )H 0 ,定义为系统静态位置误差系数。
对于0型系统
K p ls i0K m (T (1 s 1 s 1 1 ))T (2 (2 ss 1 1 )) (T (n m ss 1 ) 1 )K
ss
1 1Kp
1 1K
其中, Kals i0m s2G(s)H(s),定义为系统静态加速度误差系数。
对于0型系统,Ka=0,εss=∞;
对于Ⅰ型系统,Ka=0, ε ss=∞;
对于Ⅱ型系统,Ka=K, ε ss=
1 1 Ka K
;
对于Ⅲ型或Ⅲ型以上系统,Ka=∞, ε ss=0 。
所以,0型和Ⅰ型系统在稳定状态下都不能跟踪加速度输入信号.具有单位反 馈的Ⅱ型系统在稳定状态下是能跟踪加速度输入信号的.但带有一定的位置 误差.高于Ⅱ型系统由于稳定性差, 故不. 实用.
此外,控制系统中不可避免地存在摩擦、间隙、不灵敏区等非 线性因素,都会造成附加的稳态误差.这类由于非线性因素所引起 的系统稳态误差称为结构性稳态误差.
本章只讨论原理性稳态误差,不讨论结构性稳态误差.
.
误差定义为控制系统希望的输出量与实际的输出量之差,记做e(t), 误差信号的稳态分量被称为稳态误差,或称为静态误差,记作ess.输 入信号和反馈信号比较后的信号ε(t)也能反映系统误差的大小,称 之为偏差.应该指出,系统的误差信号e(t)与偏差信号ε(t),在一般情况 下并不相同(见图6-1).
第六章 控制系统的误差分析和 计算
6.1 稳态误差的基本概念 6.2 输入引起的稳态误差 6.3 干扰引起的稳态误差 6.4 减少系统误差的途径 6.5 动态误差系数
.
6.1 稳态误差的基本概念
对一个控制系统的要求是稳定、准确、快速.误差问题即是控制 系统的准确度问题.过渡过程完成后的误差称为系统稳态误差,稳态 误差是系统在过渡过程完成后控制准确度的一种度量.
对于Ⅱ型或Ⅱ型 以上系统:
K sslK s1 i0m ssK K 1((T11ss 1 1))T ((22ss 1 1)) ((Tm nss 1 1))
ss0
.
(3)静态加速度误差系数Ka
当系统输入为单位加速度信号时,即 则系统稳态偏差为
r(t)1 2t21(t)R ,(s)s13
11
1
1
ss ls i0s m 1 G (s)H (s)s3 ls i0s m 2 G (s)H (s)K a
ess
.
ss
H 0
系统 类型
0型系统
Ⅰ型系统
Ⅱ型系统
表6-1 各种类型的稳态偏差
单位 阶跃
1 1 K p
0
单位 斜坡
∞
1 Kv
0
0
单位 加速度
∞
∞
1 Ka
综上所述,0型系统稳态时不能跟踪斜坡输入.在系统稳定的前提下,
具有单位反馈的I型系统能跟踪斜坡输入,但具有一定的误差.这个
稳态偏差εss反比于系统开环静态放大倍数.在系统稳定的前提下,II 型或高于II型的系统其稳态偏差为零,因而能准确地跟踪斜坡输入.
NR0
s0 1K1K2Kc(1.K3)CMs
TMs1 s
- K2Kc