lim
s0
s1 1 G(s)
Xi (s)
这就是求取输入引起的单位反馈系统稳态误差的方法.需要注意 的是,终值定理只有对有终值的变量有意义.如果系统本身不稳定, 用终值定理求出的值是虚假的.故在求取系统稳态误差之前,通常 应首先判断系统的稳定性.
➢ 非单位反馈控制系统
输入引起的系统的偏差传递函数为:
(
s)
H
(
s)
1
G1
G2 s s G2 s
H
s
N
s
干扰引起的偏差为:
s
1
G2(s)H s G2 (s)G1sH
s
N
s
根据终值定理,干扰引起稳态偏差为:
ss
lim t
t
lim
s0
s s
则干扰引起稳态误差为:
ess
ss
H 0
例6-3 系统结构图如图6-8所示,当输入信号xi(t)=1(t),干扰N(t)=1(t)时,求系 统总的稳态误差ess.
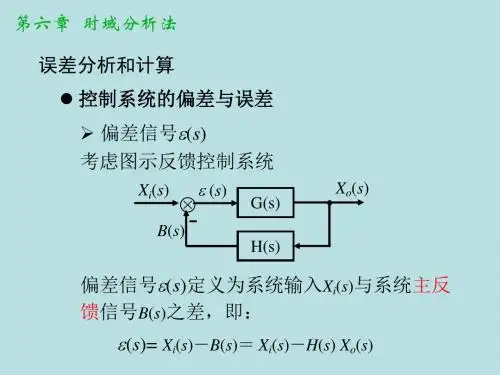
输入信号和反馈信号比较后的信号ε(t)也能反映系统误差的大小,
称之为偏差.应该指出,系统的误差信号e(t)与偏差信号ε(t),在
一般情况下并不相同(见图6-1).
控制系统的方块图如图6-1所示.实线部分与实际系统有对应关系, 而虚线部分则是为了说明概念额外画出的.
控制系统的误差信号的象函数是 E(s) sXi s X o s
s0
1 s2
1 K
,
其中
K
lim sG(s)H (s) s0
,定义为系统静态
速度误差系数。 对于0型系统:
K
lim s s0
K (1s 1)( 2s 1) ( ms 1)