控制系统的误差分析
- 格式:ppt
- 大小:618.50 KB
- 文档页数:5


控制系统的误差分析与校正控制系统是现代工业及其他领域中广泛使用的一种技术手段,用于实现精确控制和自动化。
然而,在实际应用中,由于各种因素的存在,控制系统可能会出现误差。
为了保证系统的稳定性和准确性,在误差分析的基础上进行校正是非常重要的。
一、误差分析误差是指实际输出值与期望输出值之间的差异。
在控制系统中,误差主要来自于三个方面:传感器的测量误差、执行器的执行误差以及控制器的计算误差。
1. 传感器的测量误差传感器是控制系统中用来感知被控对象状态的关键组件,其测量精度直接影响到控制系统的准确性。
然而,由于传感器本身的特性以及外部环境的干扰,传感器输出的数据可能会存在误差。
例如,温度传感器受到温度波动、噪声等因素的影响,导致温度测量结果偏离实际值。
2. 执行器的执行误差执行器是控制系统中用于实现对被控对象操作的部件,例如,电机、阀门等。
执行器的执行误差主要来自于传动装置的摩擦、机械杂质、电力波动等因素,这些因素都可能导致输出的力、位移或流量与控制要求有所偏差。
控制器通常采用数字计算方法来实现控制算法。
由于计算机性能和精度的限制,控制器在进行计算时可能会产生一定的计算误差。
这些误差可能会对控制系统的性能产生一定的影响。
二、误差校正误差校正的目的是消除或减小误差,使得控制系统的输出能够更加接近期望值。
根据误差的来源和特点,误差校正可以采取不同的方法。
1. 传感器的误差校正传感器的误差校正可以通过以下方法实现:(1) 校准:通过与已知准确值进行比较来确定传感器的误差,并进行相应的修正。
(2) 温补:对于温度传感器等受环境因素影响较大的测量装置,可以通过在系统中添加温度补偿模块来校正误差。
2. 执行器的误差校正执行器的误差校正可以通过以下方法实现:(1) 反馈控制:引入反馈环路,通过测量执行器输出的实际值,并与期望值进行比较,根据差异来调整控制信号,使得执行器的输出更加接近期望值。
(2) 预补偿:通过预先确定执行器的误差特性,并在控制信号中进行修正,从而减小执行误差。
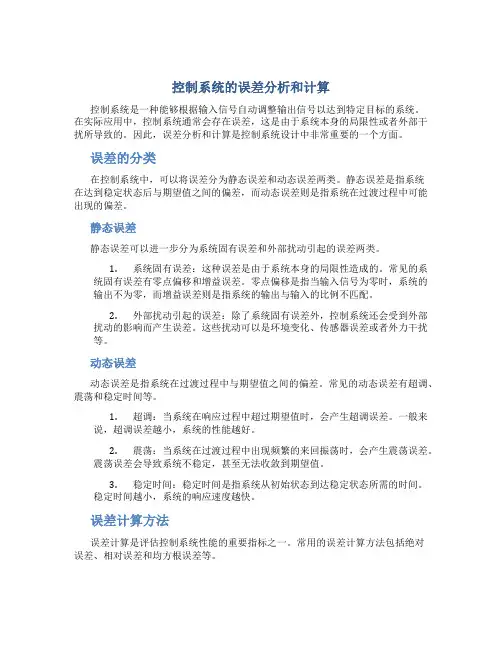
控制系统的误差分析和计算控制系统是一种能够根据输入信号自动调整输出信号以达到特定目标的系统。
在实际应用中,控制系统通常会存在误差,这是由于系统本身的局限性或者外部干扰所导致的。
因此,误差分析和计算是控制系统设计中非常重要的一个方面。
误差的分类在控制系统中,可以将误差分为静态误差和动态误差两类。
静态误差是指系统在达到稳定状态后与期望值之间的偏差,而动态误差则是指系统在过渡过程中可能出现的偏差。
静态误差静态误差可以进一步分为系统固有误差和外部扰动引起的误差两类。
1.系统固有误差:这种误差是由于系统本身的局限性造成的。
常见的系统固有误差有零点偏移和增益误差。
零点偏移是指当输入信号为零时,系统的输出不为零,而增益误差则是指系统的输出与输入的比例不匹配。
2.外部扰动引起的误差:除了系统固有误差外,控制系统还会受到外部扰动的影响而产生误差。
这些扰动可以是环境变化、传感器误差或者外力干扰等。
动态误差动态误差是指系统在过渡过程中与期望值之间的偏差。
常见的动态误差有超调、震荡和稳定时间等。
1.超调:当系统在响应过程中超过期望值时,会产生超调误差。
一般来说,超调误差越小,系统的性能越好。
2.震荡:当系统在过渡过程中出现频繁的来回振荡时,会产生震荡误差。
震荡误差会导致系统不稳定,甚至无法收敛到期望值。
3.稳定时间:稳定时间是指系统从初始状态到达稳定状态所需的时间。
稳定时间越小,系统的响应速度越快。
误差计算方法误差计算是评估控制系统性能的重要指标之一。
常用的误差计算方法包括绝对误差、相对误差和均方根误差等。
绝对误差绝对误差是指系统输出与期望值之间的差值的绝对值。
可以用以下公式表示:绝对误差 = |期望值 - 系统输出|绝对误差可以直观地反映系统的偏差情况,但它没有考虑到系统和期望值的尺度差异。
相对误差相对误差是指绝对误差与期望值之间的比值。
可以用以下公式表示:相对误差 = (绝对误差 / 期望值) * 100%相对误差可以解决绝对误差忽略尺度差异的问题,但它对于系统输出为零的情况会出现无穷大的情况。
控制系统误差分析及其算法及应用第一章概述控制系统误差是指所设计的系统输出值与输入值之间的差异。
误差分析是指对控制系统误差进行分析,以便找出误差来源,并提出改进控制系统的策略和方法。
本文将介绍控制系统误差分析的基本原理和算法,并探讨误差分析在控制系统中的应用。
第二章控制系统误差来源控制系统误差的来源有两种:系统固有误差和外部扰动。
系统固有误差是控制系统设计中的本质问题。
例如,比例控制器的响应速度较慢、积分控制器有积分误差等。
这些问题可能会导致系统出现稳态误差。
外部扰动是指系统受到的外部干扰,例如温度变化、压力变化、电磁干扰等。
这些因素会导致系统输出值与输入值之间出现偏差。
第三章调节控制器算法最常见的控制器类型是比例积分(PI)控制器。
PI控制器能够帮助系统消除稳态误差,并增加系统的响应速度。
PI控制器的算法基于积分饱和原理,即当积分误差超过一定值时,积分项将不再累加。
这有助于避免过度响应。
PI控制器还可以通过调整比例和积分项的系数来进一步优化系统响应。
第四章滤波算法滤波算法可以帮助消除由外部扰动引起的误差。
其中,低通滤波器可以帮助去除高频噪声。
高通滤波器具有相反的作用,可以去除低频噪声。
滤波器还可以用于平滑系统响应,以防止出现过度响应或噪声。
第五章预测控制算法预测控制算法可以帮助控制系统在未来一段时间内的状态进行预测,并采取相应的控制策略。
其中,支持向量机(SVM)算法可以用于预测非线性系统的响应,可以帮助控制系统消除非线性误差。
适应性控制算法可以根据系统输入和输出的实时数据来调整算法参数,以实现更好的控制效果。
第六章控制系统误差分析应用误差分析在控制系统中具有广泛应用。
其中,误差分析可以用于诊断控制系统在稳态下的性能,并帮助优化系统工作。
误差分析还可以用于诊断控制系统在动态条件下的性能,并帮助优化系统响应。
此外,误差分析还可以用于帮助控制系统诊断故障,以实现更可靠的操作。
第七章总结控制系统误差是控制系统设计中的重要问题。