第六章 电动汽车整车控制器课件
- 格式:ppt
- 大小:3.23 MB
- 文档页数:69

整车控制器(VMS,vehiclemanagementSystem),即动力总成控制器。
是整个汽车的核心控制部件,它采集加速踏板信号、制动踏板信号及其他部件信号,并做出相应判断后,控制下层的各部件控制器的动作,驱动汽整车控制器通过采集司机驾驶信号和车辆状态,通过CAN总线对网络信息进行管理,调度,分析和运算,针对车型的不同配置,进行相应的能量管理,实现整车驱动控制、能量优化控制、制动回馈控制和网络管理等功能。
介绍??纯电动汽车整车控制器(VehicleController)是纯电动汽车整车控制系统的核心部件,它对汽车的正常行驶,再生能量回收,网络管理,故障诊断与处理,车辆的状态与监视等功能起着关键的作用。
与各部件控制器的动态控制相比,整车控制器属于管理协调型控制。
体系结构整个车辆系统采用一体化集成控制与分布式处理的车辆控制系统的体系结构,各部件都有独立的控制器,整车控制器对整个系统进行能量管理及各部件的协调控制。
为满足系统数据交换量大,实时性、可靠性要求高的特点,整个分布式控制系统之间采用CAN总线进行通讯。
整车控制器主要由控制器主芯片,Flash存储器和RAM存储器及相关电路组成,控制器主芯片的输出与Flash存储器和RAM存储器的输入相连。
组成?控制器硬件包括微处理器、CAN通信模块、BDM调试模块、串口通信模块、电源及保护电路模块等。
微处理器选用了Motorola公司专门为汽车电子开发的MCgS12,它具有运算速度快和内部资源与接口丰富的特点,适合实现整车复杂的控制策略和算法。
CAN通信模块符合CAN2.0B技术规范,采用了光电隔离、电源隔离等多项抗干扰设计;BDM调试模块用于实时对控制程序进行调试、修改;串口通信模块用于对控制系统的诊断和标定;?电源模块进行了二级滤波的冗余设计,保证控制器在车载12V系统供电情况下正常工作,并具短路保护功能。
CAN,全称为“ControllerAreaNetwork”,即控制器局域网,是一种国际标准的,高性价的现场总线,在自动控制领域具有重要作用。
新能源汽车整车控制器新能源汽车整车控制器是指用于控制新能源汽车各个系统的主要控制单元。
它是汽车电子控制系统中的核心部件,负责接收传感器信号并处理,控制电动机、电源、制动系统、转向系统等各个系统的运行。
新能源汽车整车控制器的主要功能有以下几个方面:1. 电动机控制:新能源汽车的动力系统采用电动机来驱动车辆,整车控制器负责对电动机进行精确控制,包括控制电动机的转速、转矩、加速度等,使车辆能够稳定、高效地行驶。
2. 电池管理:新能源汽车采用电池作为能源储存装置,整车控制器需要对电池进行管理,包括监测电池的电量、温度、电压等状态,并进行保护措施,以确保电池的安全和寿命。
3. 制动系统控制:整车控制器负责对制动系统进行控制,根据车辆的速度、加速度等参数,计算制动力的大小和分配,使车辆能够稳定、安全地制动。
4. 转向系统控制:整车控制器对转向系统进行控制,根据驾驶者的转向指令,计算转向力的大小和方向,使车辆能够灵活、准确地转向。
5. 能量管理:新能源汽车的能源利用效率较高,整车控制器可以根据当前的行驶状态和驾驶者的需求,对能源进行合理分配,以最大限度地提高车辆的能源利用效率。
为了实现以上功能,新能源汽车整车控制器需要具备以下特点:1. 高性能:整车控制器应具有较高的计算能力和响应速度,能够实时采集和处理控制信号,保证车辆的安全性和可靠性。
2. 可靠性:整车控制器应具有较高的抗干扰能力和故障自诊断能力,能够在复杂的环境条件下正常工作,并能够准确地检测和报告故障信息,提高维修和保养的效率。
3. 兼容性:整车控制器应具有良好的兼容性,可以与各个系统的硬件和软件进行良好的通信和协调,实现系统之间的协同工作。
4. 可扩展性:整车控制器应具有良好的可扩展性,可以根据市场需求和技术进展进行功能升级和更新,以适应不断变化的市场需求。
总之,新能源汽车整车控制器是新能源汽车电子控制系统的核心部件,具有控制车辆各个系统的功能,对车辆的性能、安全性和能源利用效率起着关键作用。

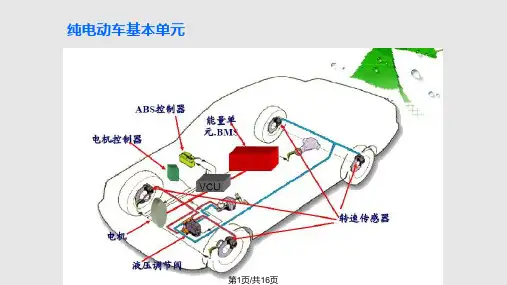
新能源汽车整车控制器系统结构新能源汽车作为一种绿色的运输工具在环保、节能以及驾驶性能等方面具有诸多内燃机汽车无法比拟的优点,其是由多个子系统构成的一个复杂系统,主要包括电池、电机、制动等动力系统以及其它附件(如图1所示)。
各子系统几乎都通过自己的控制单元(ECU)来完成各自功能和目标。
为了满足整车动力性、经济性、安全性和舒适性的目标,一方面必须具有智能化的人车交互接口,另一方面,各系统还必须彼此协作,优化匹配,这项任务需要由控制系统中的整车控制器来完成。
基于总线的分布式控制网络是使众多子系统实现协同控制的理想途径。
由于CAN总线具有造价低廉、传输速率高、安全性可靠性高、纠错能力强和实时性好等优点,己广泛应用于中、低价位汽车的实时分布式控制网络。
随着越来越多的汽车制造厂家采用CAN协议,CAN逐渐成为通用标准。
采用总线网络可大大减少各设备间的连接信号线束,并提高系统监控水平。
另外,在不减少其可靠性前提下,可以很方便地增加新的控制单元,拓展网络系统功能。
图1 新能源汽车控制系统硬件框架一、整车控制器控制系统结构公司自行设计开发的新能源汽车整车控制器包括微控制器、模拟量输入和输出、开关量调理、继电器驱动、高速CAN总线接口、电源等模块。
整车控制器对新能源汽车动力链的各个环节进行管理、协调和监控,以提高整车能量利用效率,确保安全性和可靠性。
该整车控制器采集司机驾驶信号,通过CAN总线获得电机和电池系统的相关信息,进行分析和运算,通过CAN总线给出电机控制和电池管理指令,实现整车驱动控制、能量优化控制和制动回馈控制。
该整车控制器还具有综合仪表接口功能,可显示整车状态信息;具备完善的故障诊断和处理功能;具有整车网关及网络管理功能。
其结构原理如图2所示。
图2 整车控制器结构原理图下面对每个模块功能进行简要的说明:1、开关量调理模块开关量调理模块,用于开关输入量的电平转换和整型,其一端与多个开关量传感器相连,另一端与微控制器相接;2、继电器驱动模块继电器驱动模块,用于驱动多个继电器,其一端通过光电隔离器与微控制器相连,另一端与多个继电器相接;3、高速CAN总线接口模块高速CAN总线接口模块,用于提供高速CAN总线接口,其一端通过光电隔离器与微控制器相连,另一端与系统高速CAN总线相接;4、电源模块电源模块,可为微处理器和各输入和输出模块提供隔离电源,并对蓄电池电压进行监控,与微控制器相连;5、模拟量输入和输出模块模拟量输入和输出模块,可采集0~5V模拟信号,并可输出0~4.095V的模拟电压信号。
