纯电动汽车控制策略.ppt
- 格式:ppt
- 大小:1.22 MB
- 文档页数:25
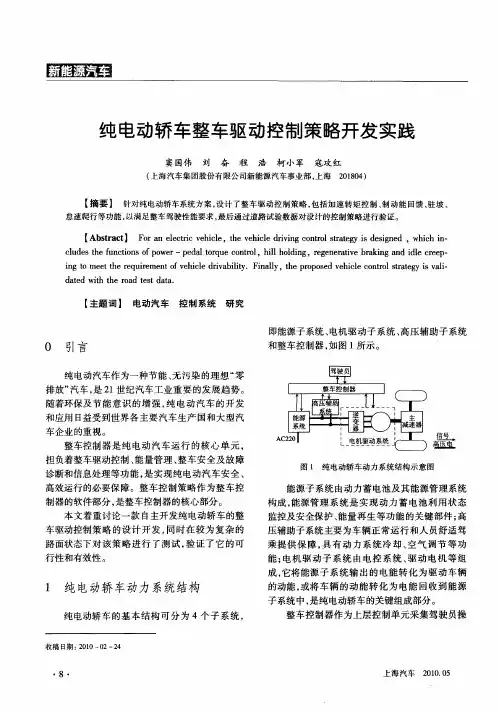

纯电动汽车整车控制器(VCU)设计⽅案纯电动汽车整车控制器设计⽅案书⽬录1 整车控制器控制功能和原理 (1)2 电动汽车动⼒总成分布式⽹络架构 (2)3 整车控制器开发流程 (3)3.1 整车及控制策略仿真 (3)3.2 整车软硬件开发 (4)3.2.1 整车控制器的硬件开发 (5)3.2.2 整车控制器的软件开发 (8)3.3 整车控制器的硬件在环测试 (9)3.4 整车控制器标定 (11)3.4.1 整车控制器的标定系统 (11)3.4.2 电动汽车整车控制器的标定流程 (12)1整车控制器控制功能和原理电动汽车是由多个⼦系统构成的⼀个复杂系统,主要包括电池、电机、变速箱、制动等动⼒系统,以及其它附件如空调、助⼒转向、DCDC及充电机等。
各⼦系统⼏乎都通过⾃⼰的控制单元来完成各⾃功能和⽬标。
为了满⾜整车动⼒性、经济性、安全性和舒适性的⽬标,⼀⽅⾯必须具有智能化的⼈车交互接⼝,另⼀⽅⾯,各系统还必须彼此协作,优化匹配。
因此,纯电动汽车必须需要⼀个整车控制器来管理纯电动汽车中的各个部件。
纯电动车辆以整车控制器为主节点、基于⾼速CAN总线的分布式动⼒系统控制⽹络,通过该⽹络,整车控制器可以对纯电动车辆动⼒链的各个环节进⾏管理、协调和监控,提⾼整车能量利⽤效率,确保车辆安全性和可靠性。
整车控制器的功能如下:1)车辆驾驶:采集司机的驾驶需求,管理车辆的动⼒。
2)⽹络管理:监控通信⽹络,信息调度,信息汇总,⽹关。
3)故障诊断处理:诊断传感器、执⾏器和系统其他部件的故障,并进⾏相应的故障处理,按照标准格式存储故障码。
4)在线配置和维护:通过车载标准CAN端⼝,进⾏控制参数修改,匹配标定,功能配置,监控,基于标准接⼝的调试能⼒等。
5)能量管理:通过对电动汽车车载耗能系统(如空调、电动泵等)的协调和管理,以获得最佳的能量利⽤率。
6)功率分配:通过综合电池的SOC、温度、电压、电流和电机的温度等车辆信息计算电机功率的分配,进⾏车辆的驱动和制动能量回馈控制。



学习任务3 纯电动汽车的控制策略任务目标任务目标能够正确的认识纯电动汽车的控制策略的功用和设计思路。
能够掌握对加速转矩控制策略、制动能回馈控制策略、驱动转矩的功率限制策略的分析方法学习重点对纯电动汽车控制策略的分析和设计。
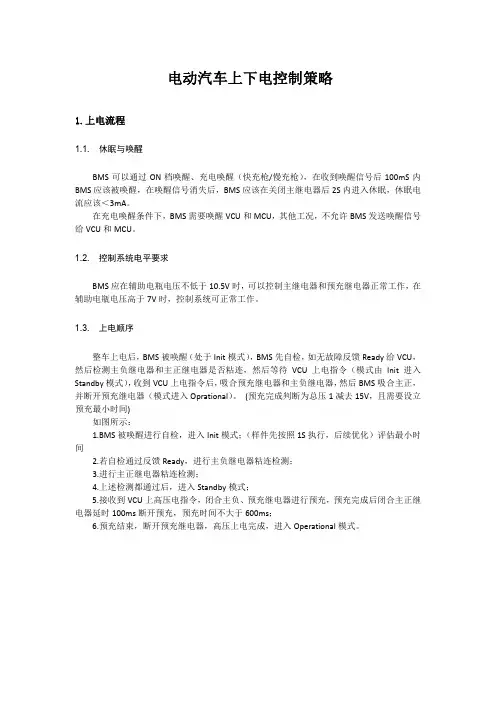
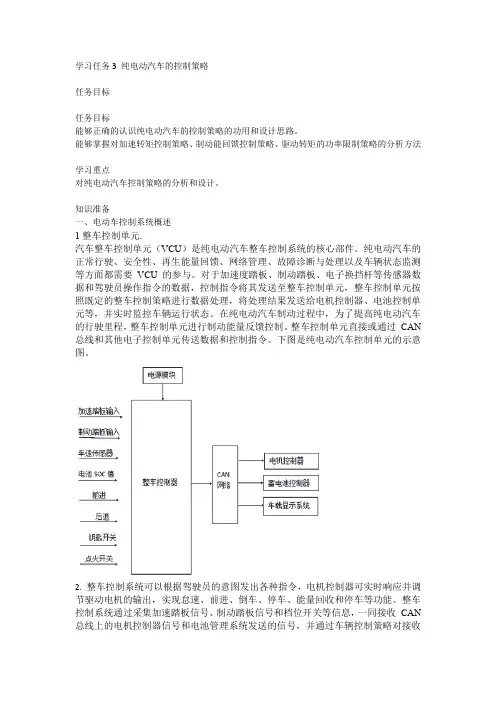
知识准备一、电动车控制系统概述1整车控制单元.汽车整车控制单元(VCU)是纯电动汽车整车控制系统的核心部件。
纯电动汽车的正常行驶、安全性、再生能量回馈、网络管理、故障诊断与处理以及车辆状态监测等方面都需要VCU 的参与。
对于加速度踏板、制动踏板、电子换挡杆等传感器数据和驾驶员操作指令的数据,控制指令将其发送至整车控制单元,整车控制单元按照既定的整车控制策略进行数据处理,将处理结果发送给电机控制器、电池控制单元等,并实时监控车辆运行状态。
在纯电动汽车制动过程中,为了提高纯电动汽车的行驶里程,整车控制单元进行制动能量反馈控制。
整车控制单元直接或通过CAN 总线和其他电子控制单元传送数据和控制指令。
下图是纯电动汽车控制单元的示意图。
2.整车控制系统可以根据驾驶员的意图发出各种指令,电机控制器可实时响应并调节驱动电机的输出,实现怠速、前进、倒车、停车、能量回收和停车等功能。
整车控制系统通过采集加速踏板信号、制动踏板信号和档位开关等信息,一同接收CAN 总线上的电机控制器信号和电池管理系统发送的信号,并通过车辆控制策略对接收到的数据信息进行分析判断,获取驾驶员的驾驶意图和车辆行驶状态,最后利用CAN 总线发出指令,控制各部件控制器的工作,从而保证车辆正常行驶3、整车控制策略的功用纯电动汽车驱动系统中主要有电机驱动装置,传动系统,动力电池等。
必须有一个性能优越、安全可靠的整车控制策略,从各个环节上合理控制车辆的运行状态、能源分配和协调功能,以充分协调和发挥各部分的优势,使汽车整体获得最佳运行状态。
整车控制策略主要包括:(一) 汽车驱动控制。
根据司机的驾驶要求、车辆状态、道路及环境状况,经分析和处理,向电机控制器发出相应指令,满足驾驶要求。
10.16638/ki.1671-7988.2021.04.001纯电动汽车加速过程的转矩优化控制策略马晓楠1,吉春宇2,韦尚军2,覃记荣2,郑伟光1,2(1.桂林电子科技大学机电工程学院,广西桂林541004;2.东风柳州汽车有限公司,广西柳州545005)摘要:针对纯电动汽车在加速过程中电机输出转矩不能准确表达驾驶员驾驶意图的问题,提出了基于模糊控制的转矩优化控制策略。
为了准确识别驾驶员在加速过程中的驾驶意图,建立了以车速偏差和加速踏板开度变化率为输入变量,驾驶意图系数为输出变量的模糊控制器,对驾驶员的加速意图进行识别,并将汽车的加速模式设计为动力模式、一般模式和经济模式3种模式。
动力模式采用硬踏板曲线控制,同时为提高车辆在低速和急加速时的加速性能,增加了基于模糊控制的补偿转矩;一般模式采用线性踏板曲线控制,作为动力模式与经济模式切换的过渡;经济模式采用软踏板曲线控制,提高车辆加速时的经济性。
仿真结果表明:与传统的线性控制策略相比,所研究的转矩优化控制策略能够准确识别驾驶员的驾驶意图,汽车的动力性和经济性都得到了改善。
关键词:纯电动汽车;驾驶意图;模糊控制;转矩优化;补偿转矩中图分类号:U469.72 文献标识码:A 文章编号:1671-7988(2021)04-01-06Torque Optimization Control Strategy for Acceleration Processof Pure Electric VehicleMa Xiaonan1, Ji Chunyu2, Wei Shangjun2, Qin Jirong2, Zheng Weiguang1,2 ( 1.School of mechanical and electrical engineering, Guilin University of Electronic Technology, Guangxi Guilin 541004;2.Dongfeng Liuzhou Motor Co., Ltd, Guangxi Liuzhou 545005 )Abstract: Aiming at the problem that the motor output torque of pure electric vehicle cannot accurately express the driver's driving intention during acceleration, a torque optimization control strategy based on fuzzy control is proposed. In order to accurately identify the driver's driving intention in the process of acceleration, a fuzzy controller with the vehicle speed deviation and the change rate of accelerator pedal opening as the input variable and the driving intention coefficient as the output variable is established to identify the driver's acceleration intention, and the acceleration mode of the car is designed as three modes: power mode, general mode and economic mode. The power mode adopts hard pedal curve control, and in order to improve the acceleration performance of the vehicle at low speed and rapid acceleration, the compensation torque based on fuzzy control is increased; the general mode adopts linear pedal curve control as the transition between power mode and economic mode; the economic mode adopts soft pedal curve control to improve the economy of the vehicle during acceleration. The simulation results show that, compared with the traditional linear control strategy, the torque optimization control strategy can accurately identify the driver's driving intention, and the vehicle's power and economy are improved.Keywords: Pure electric vehicle; Driving intention; Fuzzy control; Torque optimization; Compensation torqueCLC NO.: U469.72 Document Code: A Article ID: 1671-7988(2021)04-01-06作者简介:马晓楠(1996-),山东临沂人,在读硕士研究生,就读于桂林电子科技大学机电工程学院,主要研究方向:纯电动汽车驱动控制研究。