第3章_弹性力学经典变分原理
- 格式:doc
- 大小:1.09 MB
- 文档页数:18

七、弹性力学参量的下标表示法前面给出的力分量、应力分量、应变分量和位移分量,其表示方法引用的是记号法;这是一种公认的弹性力学参量表示方法。
下标表示法书写简洁,便于力学问题的理论推导。
1. 下标符号具有相同性质的一组物理量,可用一个带下标的字母表示:如:位移分量u, v, w 表示为u 1, u 2, u 3,缩写为u i (i =1,2,3)坐标x, y, z 表示为x 1, x 2, x 3,缩写为x i (i =1,2,3)单位矢量i, j, k 表示e i (i =1,2,3)。
体力分量X, Y, Z 表示为X 1, X 2, X 3,缩写为X i (i =1,2,3)应力分量:z zy zx yz y yxxz xy x 可表示为:333231232221131211 缩写为:)3,2,1;3,2,1( j i ij4. 克罗内克(Kroneker)符号具有如下性质 )cos(j i ij e ej i e eji ji ij 01 100010001333231232221131211 ij ij (1)3ii j i ij A A ij 也称换名算子同理:ijkj ik A a (2)选取可能位移:十、利用位移变分原理的近似解法m mm m mm mm m w C w w v B v v u A u u 000其中系数是完全任意的m m m C B A 、、1、瑞雷—里兹法(1)是在边界上满足位移边界条件的设定函数000w v u 、、(2)是在边界上为零的设定函数m m m w v u 、、可见,由(1)、(2)选取出来的是可能位移w v u 、、。
弹性力学的广义变分原理摘要:研究了在弹性力学的三类变量广义变分原理中,变量三个变量是否独立,是否包含了应力应变关系。
指出了在应用广义变分原理时应满足下列条件:泛函中的应变能用应变表示、应变余能用应力表示:在用广义变分原理求实际问题的近似解时。
三类变量的试探函数可以独立选择,但各类变量之间应不违背力学基本关系。
为了解除应力应变关系的变分约束,我们提出了一个高阶拉格朗日乘子法。
用这个高阶拉氏乘子法,我们从胡鹭原理和海赖原理分别导出了前所未知的更普遍的广义变分原理。
我们也证明了在这两类变分原理之间,有等价定理和相关的等价关系存在。
关键词:弹性力学;广义变分原理前言:弹性力学广义变分原理是弹性力学最小势能原理和弹性力学最小余能原理的推广,其特点是,变分式中各量都可有独立的变分,并且事前不受任何限制。
1.广义变分原理Ⅰ1.1广义函数及其构造。
弹性力学最小势能原理和弹性力学最小余能原理的推广,其特点是,变分式中各量都可有独立的变分,并且事前不受任何限制。
在弹性力学空间问题中,最一般的广义变分原理可叙述为:弹性力学空间问题的解必须满足弹性体的广义势能变分为零的条件,该条件又称为驻值条件,即方程,包括应变-位移关系,应力-应变关系、平衡方程和边界条件。
上述变分原理的独立变量有位移、应变、应力三类,因此称为三类变量广义变分原理。
它是中国力学家胡海昌于1954年首先提出的,日本的鹫津久一郎于1955年也独立地得到这一原理,所以又称胡-鹫津原理。
弹性力学广义变分原理有一种稍弱的形式,即二类变量广义变分原理,又称为赫林格-瑞斯纳原理。
它由E.赫林格于1914年和E.瑞斯纳于1950年分别独立提出,其数学表达式为:在有限元法和工程弹性理论中,广义变分原理有广泛的应用。
例如,在板壳弯曲的有限元计算中,用它处理变形的不协调性,可得到较好的结果。
对于解决几何非线性问题,胡-鹫津原理是一个有力的工具。
在工程弹性理论中,广义变分原理可用于推导各种近似理论;在弹性振动和稳定理论中,可用于求固有频率和临界载荷,并能获得较好的结果。
弹性力学的变分原理和应用1. 弹性力学的基本原理•弹性力学是研究物体在受力后发生形变,但受力取消后又能恢复原状的力学学科。
•弹性力学的基本原理包括胡克定律、平衡条件和应变能最小原理。
1.1 胡克定律•胡克定律是描述弹性体材料内部应力和应变之间关系的基本规律。
•胡克定律表述为应力与应变之间成正比,且比例系数为弹性模量。
•弹性模量是衡量材料弹性性能的物理参数,常见的有杨氏模量、剪切模量等。
1.2 平衡条件•在弹性力学中,物体达到平衡时需要满足平衡条件。
•平衡条件包括力的平衡条件和力矩的平衡条件。
力的平衡条件要求合外力为零,力矩的平衡条件要求合外力矩为零。
1.3 应变能最小原理•应变能最小原理是变分法在弹性力学中的应用。
•应变能是描述物体变形程度的物理量,应变能最小原理认为在给定边界条件下,物体的平衡状态对应的应变能应该是极小值。
2. 弹性力学的变分原理•变分原理是弹性力学中一种重要的数学方法,用于研究力学系统的平衡和稳定性。
•弹性力学的变分原理主要有广义虚功原理和最小势能原理。
2.1 广义虚功原理•广义虚功原理是描述连续介质力学中变形对象平衡状态的数学表述。
•广义虚功原理要求在满足平衡条件的情况下,任意变形状态与原始状态之间的虚功总和等于零。
•广义虚功原理能够推导出弹性力学的基本方程,如平衡方程和边界条件。
2.2 最小势能原理•最小势能原理是应变能最小原理在弹性力学中的具体应用。
•最小势能原理认为在给定边界条件下,力学系统的平衡状态对应的势能应该是极小值。
•最小势能原理可以通过变分法推导出与广义虚功原理等价的弹性力学方程。
3. 弹性力学的应用•弹性力学在工程和科学研究中有广泛的应用,以下列举其中一些应用领域。
3.1 结构力学•弹性力学在结构力学领域中应用广泛,用于探索材料的力学性能和结构的稳定性。
•结构力学涉及材料的弹性性质、刚度、变形和应力分布等问题,借助弹性力学的原理可以进行合理的设计和分析。
3.2 地质力学•地质力学研究地球内部岩石和土壤的力学性质及其变形行为。
弹性力学的变分原理及其应用弹性力学的基本概念•弹性力学是研究物体在外力作用下产生形变的力学学科。
•弹性力学主要关注物体的弹性变形,即物体在受到外力作用后可以恢复到原始形状的能力。
•弹性力学可以用数学模型来描述物体的变形行为,其中变分原理是一种重要的分析工具。
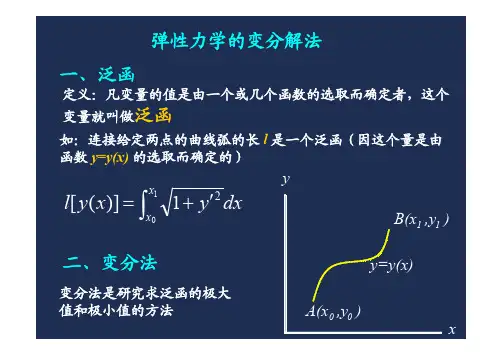
变分原理的概念•变分原理是数学中的一种重要方法,可以用来求解函数的极值问题。
•在弹性力学中,变分原理是用来求解物体的形变问题的一种方法。
•变分原理通过将弹性力学问题转化为一个变分问题,通过对变分方程进行求解,可以得到物体的形变情况。
弹性力学的变分原理•弹性力学的变分原理基于能量最小化的原理。
•变分原理假设物体的形变状态是能量最小的状态,通过对能量进行变分求解,可以求得物体的形变情况。
•变分原理可以用来推导出弹性力学中的重要方程,如弹性能量密度函数和应力-应变关系等。
变分原理的应用•变分原理在弹性力学中有着广泛的应用。
•变分原理可以用来推导出弹性力学中的基本方程,如胡克定律、拉梅定律和势能函数等。
•变分原理还可以用来求解复杂的边界值问题,如弹性体的静力平衡问题和弹性体的振动问题等。
弹性力学的变分原理应用案例•弹性体的静力平衡问题:通过变分原理可以求解弹性体在给定外力作用下的形变情况,并得到物体的位移场和应力场等信息。
•弹性体的振动问题:通过变分原理可以推导出物体的振动方程,并得到物体的共振频率和振动模态等信息。
•弹性体的材料参数求解:通过变分原理可以推导出物体材料的一些参数,如弹性模量和泊松比等。
总结弹性力学的变分原理是研究物体形变问题的重要方法,并且在弹性力学中有着广泛的应用。
通过对能量的变分求解,可以得到物体的形变情况和应力分布等重要信息。
变分原理不仅可以用来求解弹性体的静态问题,还可以用来求解弹性体的动态问题和材料参数等。
因此,掌握弹性力学的变分原理对于深入理解和应用弹性力学有着重要的意义。
第十一章弹性力学的变分原理一.内容介绍由于偏微分方程边值问题的求解在数学上的困难,因此对于弹性力学问题,只能采用半逆解方法得到个别问题解答。
一般问题的求解是十分困难的,甚至是不可能的。
因此,开发弹性力学的数值或者近似解法就具有极为重要的作用。
变分原理就是一种最有成效的近似解法,就其本质而言,是把弹性力学的基本方程的定解问题,转换为求解泛函的极值或者驻值问题,这样就将基本方程由偏微分方程的边值问题转换为线性代数方程组。
变分原理不仅是弹性力学近似解法的基础,而且也是数值计算方法,例如有限元方法等的理论基础。
本章将系统地介绍最小势能原理和最小余能原理,并且应用变分原理求解弹性力学问题。
最后,将介绍有限元方法的基本概念。
本章内容要求学习变分法数学基础知识,如果你没有学过上述课程,请学习附录3或者查阅参考资料。
二.重点1. 几何可能的位移和静力可能的应力;2. 弹性体的虚功原理;3. 最小势能原理及其应用;4. 最小余能原理及其应用;5. 有限元原理的基本概念。
知识点静力可能的应力弹性体的功能关系功的互等定理弹性体的总势能虚应力应变余能函数应力变分方程最小余能原理的近似解法扭转问题最小余能近似解有限元原理与变分原理有限元原理的基本概念有限元整体分析几何可能的位移虚位移虚功原理最小势能原理瑞利-里茨(Rayleigh-Ritz)法伽辽金(Гапёркин)法最小余能原理平面问题最小余能近似解基于最小势能原理的近似计算方法基于最小余能原理的近似计算方法有限元单元分析附录3 变分原理泛函是指某一个量,它的值依赖于其它一个或者几个函数。
因此泛函也称为函数的函数。
变分法的基本问题是求解泛函的极值。
对于弹性力学问题,根据能量关系可以使偏微分方程的边值问题转化为代数方程。
弹性体的应变能是基本未知量应力或者应变分量的函数,当然应力或者应变分量是坐标的函数。
因此,应变能就是泛函。
在数学分析中,讨论函数和函数的极值。
变分法讨论泛函的极值,是极值问题的推广。

第二章弹性直梁问题的变分原理及有限元素法讨论的问题:一变剖面的梁,一端 (x =0 )固支,另一端(x = l )简支。
承受轴向拉 在 x= l 处:w = W |称谓:把满足方程及全部边界条件的挠度叫真实挠度,精确解;把满足基本边界条 件但不满足微分方程和自然边界条件的挠度叫(变形)可能挠度。
i ) 最小势能原理(变分原理)把载荷看作是不变的已知函数, 整个系统的势能包括三部分:(1)梁的应变能:f . 2 ¥d w—r I dx I dx 丿(3)横向载荷势能:力N ,分布横向载荷q (x )以及端点弯矩M i 的作用。
4J控制微分方程及边界条件(以梁的挠度 w 表示)叮 EjdV dx 2 Idx 2丿.2M d w -Ny^q udx 2丿=q在x= 0处:w = w 0,也 dxN o>基本边界条件(广义固支).2d w — -EJ —- M | dx自然边界条件(M + M i ) = O21 l □厂Jo EJ(2)轴向应变能:□N1 i rON 2w \dx、2dxdxgs 气㈣+1十丄dx Vl dx 丿2把挠度看作是可变的自变函数。
I w+dwOT 11(w ^^f lf EJ d 2wd^w.dx 2 dx 2 +N 叢詈-计严+恥心在 X =0处,人w=0, i w ' = 0 在X =丨处,A w = 0与W k 相应的总势能:=口(w k )= n(w + A w )= ri(w )+z n 11(w, A w )中n 2(A w )其中:Ij P = —[qwdx +M |W '(I )后项取加号,是为着能够得到自然边界条件的结果⑷系统总势能口:n/g EJ(d 2w )2 1 X 厂㊁々w V一——I-qw>dx + M i w '(l )I dx 丿*除w 为可变外,其余变量假定为已知的不变量。
最小势能原理:在所有变形可能的挠度中,精确解使系统的总势能取最小值 。
3 弹性静力学变分原理一 、弹性力学平衡问题的基本方程:回顾,0ij j i f σ+= 在域V 内(3.1),,()/2ij i j j i u u ε=+ (3.2) ij ijkl kl c σε= 或 ij ijkl kl s εσ= (3.3a ,b )式中ijkl ijlk jikl klij c c c c ===(3.4)边界条件:在域V 的边界B 上,12B B B =⋃,有i i u u =, 在1B 上(3.5) ij ij i p n p σ==, 在2B 上(3.6)补注1:有限变形应变公式不限于小变形的应变定义依据坐标的选取分两类,一类是以变形前坐标i X 来衡量,称为Lagrange 应变或者Green 应变,另一类则是以变形后坐标i x 来衡量,称为Euler 应变或者Almansi 应变,分别为12j i k k ij j i i j u uu u L X X X X ⎛⎫∂∂∂∂=++⎪ ⎪∂∂∂∂⎝⎭12j i k k ij ji i j u u u u E x x x x ⎛⎫∂∂∂∂=+- ⎪ ⎪∂∂∂∂⎝⎭ (s-3.1)补注2:微极弹性理论经典的弹性力学中,从微六面体的平衡出发推导平衡方程时,六面体各面上仅有一合力作用,自然有三个分量。
但我们在研究宏观构件,比如弹性直梁时,其截面上除了一个合力外,尚有一个合力矩(即三个力矩分量)。
也就是说,在经典的弹性理论中,微元体面上的合力矩被忽略了。
如果考虑这一合力矩的影响,我们便得到所谓的Cosserat 理论,相应的介质称为Cosserat 介质。
事实上,第一个考虑合力矩影响的是德国学者W. V oigt ,他于1887年发表论文,发现这一考虑将导致应力张量的非对称性。
E. Cosserat 和F. Cosserat 兄弟俩于1909年完善了Voigt 的工作,特别是提出了物体在变形过程中其每一点不仅有平移变位,而且伴随着转动变位。
第3章 弹性力学经典变分原理3.1 弹性力学基础3.1.1 变形分析要研究物体变形首先要研究其位移如何来描述。
在数学上,我们引进物质坐标和空间坐标的概念分别来描述物体上某一点的位置变动,具体说来,先取一Descartes 坐标系做参照系,变形前物体的构形为B ,其每个质点的位置可用一组我们称之为物质坐标的坐标值来表示;变形后物体的构形变成B ’,取另一个Descartes 坐标系做参照系,我们称之为空间坐标系。
如下图,变形前任一点P在物质坐标系中的坐标为),,(321X X X ,变形后P 变化到Q 点在空间坐标系中的坐标为),,(321x x x 。
图3.1物质坐标系和空间坐标系矢量PQ 表示了质点P 的位移,记为u 。
为简单和方便起见,一般取两个参照系相重合,这时位移矢量u 的分量i u 可以用下式来表示,(1,2,3)i i i u x X i =-= (3.1.1)其中变形后质点的坐标)3,2,1(=i x i 与变形前的坐标)3,2,1(=i X i 存在着确定的关系。
我们可以把变形后质点的坐标看成是变形前质点物质坐标的函数,即123(,,),(1,2,3)i i x x X X X i == (3.1.2)也可以用其逆变换 (数学上要求Jacobi 行列式不为零) 来表述,也就是从变形后空间坐标描述的质点,来追涉变形前这一质点的坐标123(,,),(1,2,3)i i X X x x x i == (3.1.3) 如果把位移u 看作是变形前坐标、即物质坐标的函数123(,,),(1,2,3)i i u u X X X i == (3.1.4)称之为Lagrange 描述。
如果把位移u 看作是变形后坐标、即空间坐标的函数123(,,),(1,2,3)i i u u x x x i == (3.1.5)称之为Euler 描述。
我们取变形前P 点),,(321X X X 及相邻P’112233(d ,d ,d )X X X X X X +++,它们之间的长度平方为3201d d d i i i s X X ==∑ (3.1.6)它们变形后相应于Q 点),,(321x x x 及相邻Q ’112233(d ,d ,d )x x x x x x +++,其长度平方为321d d d i i i s x x ==∑ (3.1.7)根据变形前后的坐标关系有3311d d ,d d i ii j j j j jjxX x X X x i X x ==∂∂==∂∂∑∑从而有33220,11d d ()d d ij i j i j i jx x s s X X X X αααδ==∂∂-=-∂∂∑∑(3.1.8)或者33220,11d d ()d d ij i j i j i jX X s s x x x x αααδ==∂∂-=-∂∂∑∑(3.1.9)如果定义3121ij ij i j x x E X X αααδ=⎛⎫∂∂=- ⎪ ⎪∂∂⎝⎭∑ (3.1.10)及3121ij ij i j X X x x αααεδ=⎛⎫∂∂=- ⎪ ⎪∂∂⎝⎭∑ (3.1.11) 则有 220d d 2d d ij i j s s E X X -= (3.1.12)220d d 2d d ij i j s s x x ε-= (3.1.13)上述表达式中,有重复下标的,i j ,已省略了相应的求和记号3311,i j ==∑∑,称为Einstein 约定。
我们称ij E =E 为Lagrange-Green 应变张量(用Lagrange 坐标系来描述),把ij ε=ε称作为Euler-Almansi 应变张量(用Euler 坐标系来描述)。
如果我们在Lagrange 坐标系中,沿着某一个特定的坐标方向取一个微分单元1d R 123(d 0,d d 0)X X X ≠==, 其变形前长度为01d d s X =而变形后的长度为0d s s =因此,该微段变形前后的相对伸长量为10d d 1d s s E s -== (3.1.14) 可见11E 与线元的相对伸长有关。
当111<<E 时,111E E ≈。
如果在Lagrange 坐标系中沿坐标轴方向取两个相互垂直的微元,分别为11d (d ,0,0)X =R 和22d (0,d ,0)X =R ,它们的长度分别为011d d s X =022d d s X =那么在变形后它们长度1d s 和2d s 分别为11d s X = (3.1.15)22d s X = (3.1.16)变形后两个微段对应向量的内积为 312121212112cos d d d d 2d d k kk x x s s X X E X X X X θ=∂∂==∂∂∑112212k kx x E X X ∂∂=∂∂ (3.1.17)其中θ为变形后两个微段之间的夹角。
所以1212122d d cos d d E X X s s θ== (3.1.18)如果记变形前后两个微元之间夹角的变化(减少)为γ,也就是说θπγ-=2(3.1.19)那么sin cos γθ==(3.1.20)当111<<E ,122<<E 时,γ可以表示为12122,/2E E γγ≈= (3.1.21)所以说,12E 是与剪切变形有关的量。
如果用空间坐标系来描述变形,也就是说,位移矢量u 的分量i u 用变形后的坐标来描述1,23(,),(1,2,3)i i i i i u x X x X x x x i =-=-= 1,23(,),(1,2,3)i i i i i X x u x u x x x i =-=-=那么312131213121ij ij i j ij i j i j j i j i i j X X x x uu x xu u u u x x x x αααααααααααεδδδδ===⎛⎫∂∂=- ⎪ ⎪∂∂⎝⎭⎡⎤⎛⎫⎛⎫∂∂=---⎢⎥ ⎪ ⎪ ⎪∂∂⎢⎥⎝⎭⎝⎭⎣⎦⎡⎤∂∂∂∂=+-⎢⎥∂∂∂∂⎢⎥⎣⎦∑∑∑ (3.1.22) 在小变形情况下,如果忽略高阶小量后,那么有12j i ij j i u u u u ε⎡⎤∂∂=+⎢⎥∂∂⎢⎥⎣⎦(3.1.23) 我们称之为Cauchy 微小应变。
在工程上描述的应变为 x u x ∂∂=ε,y v y ∂∂=ε,zwz ∂∂=εy w z v yz ∂∂+∂∂=γ,x v y u xy ∂∂+∂∂=γ,zx u w z xγ∂∂=+∂∂ 把他们写成矩阵的形式为000000000Tx y z yz zx xy x z y u v y z x w zyxεεεγγγ⎧⎫⎡⎤∂∂∂⎪⎪⎢⎥∂∂∂⎪⎪⎢⎥⎧⎫⎪⎪⎢⎥∂∂∂⎪⎪⎪⎪=⎨⎬⎨⎬⎢⎥∂∂∂⎪⎪⎪⎪⎢⎥⎩⎭⎪⎪⎢⎥∂∂∂⎪⎪⎢⎥∂∂∂⎣⎦⎪⎪⎩⎭ (3.1.24) 也就是()T =εE u ∇ (3.1.25)其中 []T u v w =u[]T x y z yz zx xy εεεγγγ=ε000()(,,)000000x z y x y z y z x zyx⎡⎤∂∂∂⎢⎥∂∂∂⎢⎥⎢⎥∂∂∂∂∂∂=⎢⎥∂∂∂∂∂∂⎢⎥⎢⎥∂∂∂⎢⎥∂∂∂⎣⎦E =E ∇ 式中∇代表梯度算子x y z∂∂∂=++∂∂∂ij k ∇ i,j,k 代表z y x ,,方向的单位向量。
3.1.2 应力分析图3.2物体受力如图所示, 通常作用于物体的外力可以分为两种:一种是分布在物体表面的作用力,例如一个物体对另一物体作用的压力,象水压力等,我们称之为面力(surface traction);另一种是分布在物体体积内部的力,象重力、磁力或运动物体的惯性力等,我们称之为体力(body force)。
图3.3内力和应力当一个物体处于平衡状态时, 假如我们设想从中分离出一部分B ,其表面用S 表示。
S 上任意一点Q,其邻域S ∆面上作用的合力为∆F ,压力0limS S∆→∆=∆Fp正应力σ剪应力 τ截面上应力,()σ,τp 与截面法向有关. 当取定坐标系统xoy 后, 可以用每个坐标面上的沿坐标轴的三个应力分量来表示应力状态。
根据剪应力互等定律, 其中独立的分量有6个, 我们记为应力张量(满足坐标变换规律)x xy xz ij yx y yz zx zy z στττστττσ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦σ, zy yz zx xz yx xy ττττττ===,, (3.1.26)应力的符号规则: 外法线方向与坐标轴方向一致的截面上, 沿坐标轴正方向的应力为正, 沿坐标轴负方向的应力为负;反之, 外法线方向与坐标轴方向相反的截面上, 沿坐标轴正方向的应力为负, 沿坐标轴负方向的应力为正.y图3.4应力张量与截面上应力3.1.3 截面上应力在某一个方向(,,)Tx y z n n n =n 的截面上,根据力的平衡关系,截面上应力p 沿三个坐标轴上的应力分量为31,1,2,3i ij j j p n i σ===∑也就是说 x x x xy y xz z p n n n σττ=++y yx x y y yz z p n n n τστ=++ z zx x zy y z z p n n n ττσ=++写成矩阵形式为000000000x yx xz y z y y z x yz z zyxzx xy p n n n p n n n p n n n σσστττ⎧⎫⎪⎪⎪⎪⎡⎤⎧⎫⎪⎪⎢⎥⎪⎪⎪⎪=⎨⎬⎨⎬⎢⎥⎪⎪⎪⎪⎢⎥⎩⎭⎣⎦⎪⎪⎪⎪⎪⎪⎩⎭(3.1.27)也就是说()=p E n σ (3.1.28) 式中Txyz p p p ⎡⎤=⎣⎦p[]T x y z yz zx xy σσστττ=σ()E n 就是将()E ∇中的梯度矢量替换成截面的法向单位矢量n ,即000()000000x z y y z x zyxn n n n n n n n n ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦E n (3.1.29)3.1.4 平衡方程应力分量在物体内部的平衡方程为3,10,1,2,3ij ji j f i σ=+==∑ (3.1.30)写成分量的形式为0=+∂∂+∂∂+∂∂x zxxy x f zy x ττσ 0=+∂∂+∂∂+∂∂y yz y xy f zyxτστ0=+∂∂+∂∂+∂∂z zyz zx f zy x σττ 其中z y x f f f ,,分别是体积力在z y x ,,轴上的分量。
如果把平衡方程表示成矩阵的形式为0000000000x y x z y yz z zx xy x z y f f y z x fzyxσσστττ⎧⎫⎡⎤∂∂∂⎪⎪⎢⎥∂∂∂⎪⎪⎢⎥⎧⎫⎪⎪⎢⎥∂∂∂⎪⎪⎪⎪+=⎨⎬⎨⎬⎢⎥∂∂∂⎪⎪⎪⎪⎢⎥⎩⎭⎪⎪⎢⎥∂∂∂⎪⎪⎢⎥∂∂∂⎣⎦⎪⎪⎩⎭也就是()0+=E f ∇σ (3.1.31) 式中Txyz f f f ⎡⎤=⎣⎦f3.1.5 应变能、余应变能及应力与应变关系物体发生弹性变形时,外力所做的功等于物体中所储存的应变能。