第0章-弹性力学、变分原理与有限元法2014
- 格式:pdf
- 大小:1.13 MB
- 文档页数:17
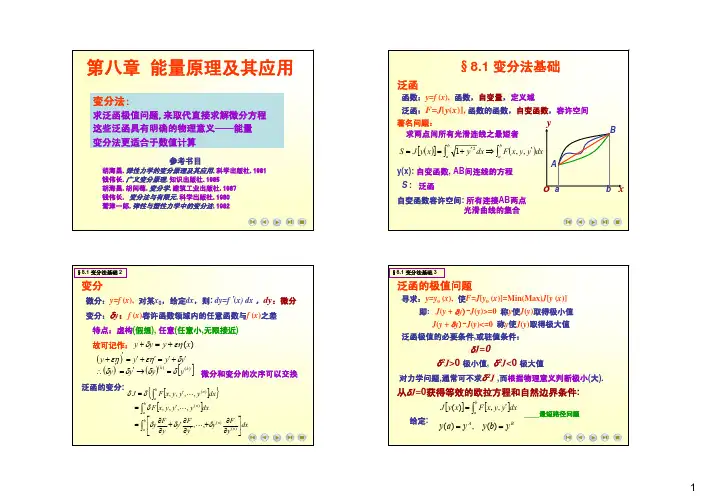
弹性力学的广义变分原理摘要:研究了在弹性力学的三类变量广义变分原理中,变量三个变量是否独立,是否包含了应力应变关系。
指出了在应用广义变分原理时应满足下列条件:泛函中的应变能用应变表示、应变余能用应力表示:在用广义变分原理求实际问题的近似解时。
三类变量的试探函数可以独立选择,但各类变量之间应不违背力学基本关系。
为了解除应力应变关系的变分约束,我们提出了一个高阶拉格朗日乘子法。
用这个高阶拉氏乘子法,我们从胡鹭原理和海赖原理分别导出了前所未知的更普遍的广义变分原理。
我们也证明了在这两类变分原理之间,有等价定理和相关的等价关系存在。
关键词:弹性力学;广义变分原理前言:弹性力学广义变分原理是弹性力学最小势能原理和弹性力学最小余能原理的推广,其特点是,变分式中各量都可有独立的变分,并且事前不受任何限制。
1.广义变分原理Ⅰ1.1广义函数及其构造。
弹性力学最小势能原理和弹性力学最小余能原理的推广,其特点是,变分式中各量都可有独立的变分,并且事前不受任何限制。
在弹性力学空间问题中,最一般的广义变分原理可叙述为:弹性力学空间问题的解必须满足弹性体的广义势能变分为零的条件,该条件又称为驻值条件,即方程,包括应变-位移关系,应力-应变关系、平衡方程和边界条件。
上述变分原理的独立变量有位移、应变、应力三类,因此称为三类变量广义变分原理。
它是中国力学家胡海昌于1954年首先提出的,日本的鹫津久一郎于1955年也独立地得到这一原理,所以又称胡-鹫津原理。
弹性力学广义变分原理有一种稍弱的形式,即二类变量广义变分原理,又称为赫林格-瑞斯纳原理。
它由E.赫林格于1914年和E.瑞斯纳于1950年分别独立提出,其数学表达式为:在有限元法和工程弹性理论中,广义变分原理有广泛的应用。
例如,在板壳弯曲的有限元计算中,用它处理变形的不协调性,可得到较好的结果。
对于解决几何非线性问题,胡-鹫津原理是一个有力的工具。
在工程弹性理论中,广义变分原理可用于推导各种近似理论;在弹性振动和稳定理论中,可用于求固有频率和临界载荷,并能获得较好的结果。
有限元分析
的一般规律物体在空间的位置随时间的改变
对象内容
任务
对象内容
任务
概述
ANSYS 静力分析z起重机械有限元应用
整机模态分析
车辆安全性
工件淬火3.06 min 时的温度、组织分布(NSHT3D)
同济大学
同济大学
金属反挤压成型:温度分布和变化铸造成型:温度变化和气泡
速度
压力导流管分析
超音速飞行压力分布汽车气动分析
高速导弹气动
同济大学
两根热膨胀系数不同的棒焊接在一起,加热后的变形情况
子结构方法分析大型结构的早期应用法
梁单元
建模时充分利用重复性。
第二章有限单元法的基本原理作为一种比较成熟的数值计算方法,有限元的数学基础是变分原理。
经过半个过世纪的发展,它的数学基础已经比较完善。
从数学角度分析,有限元法是以变分原理和剖分插值为基础的数值计算方法。
它广泛的应用于解算各种类型的偏微分方程,特别对椭圆型方程,因为椭圆型方程的边值问题等价于适当的变分问题,即能量积分的级值问题。
通过变分,导出相应的泛涵,再把作用域从几何上剖分为足够小的单元,这样就能够用简单的图形去拟合复杂的边界,用简单的初等函数去模拟单元的性质。
在解算中先对每个单元进行分析,后在通过连接单元的节点对作用域的整体进行分析,就是对泛涵求极值,从而把一个复杂的偏微分方程求解问题,变成解线形代数方程组的问题。
尽管这样会出现大量的未知数,由于采用了矩阵分析的方法,总体上很有规律,适合编制程序用计算机完成。
通常的数学考虑包括这些:1)从古典变分方法原理去定义微分方程边值问题的广义解以及在古典变分方法的框架对有限元进行理论分析。
2)保证偏微分方程边值问题的提法正确,即要求解存在、唯一和稳定,即保证数值解法是可靠的。
3)有限元中重要的一点是采用了分块多项式插值函数,因此,有限元的误差估计转化为插值逼近的误差估计问题。
4)有限元的收敛性和误差估计。
由于本文是应用有限元的理论解决大地测量中的问题,因此,这里将不讨论上叙问题,而是从固体力学的基本方程出发,通过虚功原理建立起离散化的有限元方程。
另外,还以八节点六面体单元为例,简要叙述了实际中最常用的等参单元的概念及其数值变化的一些公式。
§2.1 弹性力学基本方程有限元法中经常要用到弹性力学的基本方程,这里写出这些方程的矩阵表达式。
2-1-1、平衡方程对任意一点的受力情况分析,沿坐标轴方向x, y ,z分解得到平衡方程0*00000000=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡∂∂∂∂∂∂∂∂∂∂∂∂∂∂∂∂∂∂z y xxz yz xy z y x F F F z yzz x y z y x τττσσσ 记为: 0=+F A σ其中A 是微分算子,F 是体积力向量。

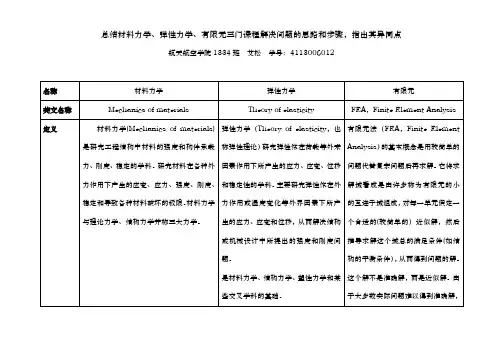
总结材料力学、弹性力学、有限元三门课程解决问题的思路和步骤,指出其异同点航天航空学院1334班艾松学号:4113006012杆件在多种外力共同作用下的变形(或力),可先分别求出各外力单独作用下杆件的变形(或力),然后将这些变形(或力)叠加,从而得到最终结果。
②几何非线性问题。
若杆件变形较大,就不能在原有几何形状的基础上分析力的平衡,而应在变形后的几何形状的基础上进行分析。
这样,力和变形之间就会出现非线性关系,这类问题称为几何非线性问题。
③物理非线性问题。
在这类问题中,材料的变形和力之间(如应变和应力之间)不满足线性关系,即材料不服从胡克定律。
在几何非线性问题和物理非线性问题中,叠加原理失效。
解决这类问题可利用卡氏第一定理、克罗蒂-恩盖塞定理或采用单位载荷法解。
直角坐标系下的弹性力学的基本方程为:平衡微分方程(1)几何方程(2)物理方程(3)(1)式中的σx、σy、σz、τyz=τzy、τxz=τzx、τxy=τyx为应力分量,X、Y、函数的插值点,将微分方程中的变量改写成由各变量或其导数的节点值与所选用的插值函数组成的线性表达式,借助于变分原理或加权余量法,将微分方程离散求解。
采用不同的权函数和插值函数形式,便构成不同的有限元方法。
有限元方法最早应用于结构力学,后来随着计算机的发展慢慢用于流体力学的数值模拟。
在有限元方法中,把计算域离散剖分为有限个互不重叠且相互连接的单元,在每个单元选择基函数,用单元基函数的线形组合来逼近单元中的真解,整个计算域上总体的基函数可以看为由每个单二、变形及刚度条件 拉压:∑⎰===∆LEAxx N EAL N EANLL d )(ii 扭转:()⎰=∑==Φpp i i p GI dx x T GI L T GI TLπφ0180⋅=Φ=p GI T L弯曲:(1)积分法:)()(''x M x EIy =C x x M x EI x EIy +==⎰d )()()('θD Cx x x x M x EIy ++=⎰⎰d ]d )([)((2)叠加法:()21,P P f …=()()21P f P f ++…()21,P P θ=()()++21P P θθ…三、应力状态与强度理论 二向应力状态斜截面应力:ατασσσσσα2sin 2cos 22xy yx yx --++=ατασστα2cos 2sin 2xy yx +-=二向应力状态极值正应力及所在截面方位角:到。

第二章弹性直梁问题的变分原理及有限元素法讨论的问题:一变剖面的梁,一端 (x =0 )固支,另一端(x = l )简支。
承受轴向拉 在 x= l 处:w = W |称谓:把满足方程及全部边界条件的挠度叫真实挠度,精确解;把满足基本边界条 件但不满足微分方程和自然边界条件的挠度叫(变形)可能挠度。
i ) 最小势能原理(变分原理)把载荷看作是不变的已知函数, 整个系统的势能包括三部分:(1)梁的应变能:f . 2 ¥d w—r I dx I dx 丿(3)横向载荷势能:力N ,分布横向载荷q (x )以及端点弯矩M i 的作用。
4J控制微分方程及边界条件(以梁的挠度 w 表示)叮 EjdV dx 2 Idx 2丿.2M d w -Ny^q udx 2丿=q在x= 0处:w = w 0,也 dxN o>基本边界条件(广义固支).2d w — -EJ —- M | dx自然边界条件(M + M i ) = O21 l □厂Jo EJ(2)轴向应变能:□N1 i rON 2w \dx、2dxdxgs 气㈣+1十丄dx Vl dx 丿2把挠度看作是可变的自变函数。
I w+dwOT 11(w ^^f lf EJ d 2wd^w.dx 2 dx 2 +N 叢詈-计严+恥心在 X =0处,人w=0, i w ' = 0 在X =丨处,A w = 0与W k 相应的总势能:=口(w k )= n(w + A w )= ri(w )+z n 11(w, A w )中n 2(A w )其中:Ij P = —[qwdx +M |W '(I )后项取加号,是为着能够得到自然边界条件的结果⑷系统总势能口:n/g EJ(d 2w )2 1 X 厂㊁々w V一——I-qw>dx + M i w '(l )I dx 丿*除w 为可变外,其余变量假定为已知的不变量。
最小势能原理:在所有变形可能的挠度中,精确解使系统的总势能取最小值 。
静力可能的应力 弹性体的功能关系 功的互等定理 弹性体的总势能 虚应力 应变余能函数 应力变分方程 最小余能原理的近似解法 扭转问题最小余能近似解 有限元原理与变分原理 有限元原理的基本概念 有限元整体分析 第十一章 弹性力学的变分原理几何可能的位移虚位移虚功原理最小势能原理瑞利-里茨 (Rayleigh-Ritz) 法 伽辽金(『anQpKUH )法 最小余能原理 平面问题最小余能近似解 基于最小势能原理的近似计算方法 基于最小余能原理的近似计算方法 有限元单元分析一、内容介绍由于偏微分方程边值问题的求解在数学上的困难,因此对于弹性力学问题, 只能采用半逆解方法得到个别问题解答。
一般问题的求解是十分困难的, 甚至是 不可能的。
因此,开发弹性力学的数值或者近似解法就具有极为重要的作用。
变分原理就是一种最有成效的近似解法,就其本质而言,是把弹性力学的基 本方程的定解问题, 转换为求解泛函的极值或者驻值问题, 这样就将基本方程由 偏微分方程的边值问题转换为线性代数方程组。
变分原理不仅是弹性力学近似解 法的基础,而且也是数值计算方法,例如有限元方法等的理论基础。
本章将系统地介绍最小势能原理和最小余能原理, 并且应用变分原理求解弹 性力学问题。
最后,将介绍有限元方法的基本概念。
本章内容要求学习变分法数学基础知识,如果你没有学过上述课程,请学习 附录3或者查阅参考资料。
知识点、重点1几何可能的位移和静力可能的应力;2、弹性体的虚功原理;3、最小势能原理及其应用;4、最小余能原理及其应用;5、有限元原理的基本概念。
§11.1弹性变形体的功能原理学习思路:本节讨论弹性体的功能原理。
能量原理为弹性力学开拓了新的求解思路,使得基本方程由数学上求解困难的偏微分方程边值问题转化为代数方程组。
而功能关系是能量原理的基础。
首先建立静力可能的应力「:,和几何可能的位移’概念;静力可能的应力和几何可能的位移;可以是同一弹性体中的两种不同的受力状态和变形状态,二者彼此独立而且无任何关系。