(完整版)三相无刷直流电机系统结构及工作原理.doc
- 格式:doc
- 大小:306.52 KB
- 文档页数:8
三相无刷直流电机原理和控制方法一、BLDC电机的工作原理:BLDC电机是由无刷电机和电子调速器组成的系统。
其工作原理主要包括定子和转子两部分。
1.定子部分:BLDC电机的定子上有三个永磁铁,分别是U、V、W相。
这三个相互相隔120度,每个相上都有两个定子绕组。
当定子绕组通电时,会在定子上形成一个旋转的磁场。
2.转子部分:BLDC电机的转子上有多个永磁铁,通常为四个或六个。
这些永磁铁构成了转子的磁极,通过转子上的轴向磁力使得电机可以旋转。
3.电子调速器:BLDC电机的电子调速器主要由功率器件和控制电路组成。
控制电路通过传感器检测电机的转子位置和速度,并根据外部的控制信号来控制功率器件的开关,从而控制电机的转速和运行状态。
BLDC电机的工作原理是通过改变定子绕组的电流方向以产生旋转磁场,进而旋转转子来完成工作的。
二、BLDC电机的控制方法:BLDC电机的控制方法主要包括传感器控制和传感器无控制两种。
1.传感器控制:传感器控制是通过传感器检测电机的旋转位置和速度,并将这些信号反馈给控制器,从而调整电机的驱动信号来控制电机的运行状态和转速。
传感器控制的优点是精确度高、控制稳定,但需要安装传感器,增加了电机的结构复杂性和成本。
2.传感器无控制:传感器无控制是通过算法来估计电机的转子位置和速度,而无需使用传感器。
常见的传感器无控制方法有基于反电动势法和基于电流观测法。
基于反电动势法是通过测量电机绕组的反电动势来推测转子位置和速度。
该方法简单直观,但对低速和低转矩的控制效果不好。
基于电流观测法是通过观察电机绕组的电流变化来推测转子位置和速度。
该方法相对准确,但对电流测量的要求较高。
传感器无控制的优点是结构简单、成本低,但其精确度和控制稳定性相对较差。
三、总结:BLDC电机将传统的有刷直流电机中的机械换向器替换成了电子换向器,具有结构简单、效率高、控制精度高和使用寿命长等优点。
其工作原理是通过改变定子绕组的电流方向以产生旋转磁场,进而旋转转子来完成工作的。
三相直流无刷电机工作原理
三相直流无刷电机是一种没有刷子和换向器的电机,采用电子换向技术来实现转子的换向和驱动。
其工作原理基于电磁感应和电子控制两个主要原理。
首先,三相直流无刷电机的转子上有若干个磁极,固定在定子的内部。
定子上则布置了三个相互平衡的绕组,分别称为A 相、B相和C相。
这三个绕组分别与电源连接,形成一个闭合的电路。
当通过A相绕组传入电流时,产生的磁场与转子上的磁极相互作用,使得转子受到电磁力的作用而开始转动。
接着,当转子旋转到某个位置时,A相绕组的电流就会被切断,而B相绕组的电流则开始流动。
由于转子上的磁极位置发生了变化,同样的,磁场与转子的磁极相互作用,进一步推动转子继续旋转。
这个过程将会不断重复,三个相互平衡的绕组依次通电,不断地产生电磁力,并将转子驱动到连续旋转的模式。
而这个过程的控制则是通过电子线路来实现的。
通过使用传感器来确定转子的位置,并将这些信号传输给电子线路。
电子线路会根据传感器信号来控制绕组的通电情况,实现适时的换向控制。
这样,转子就能按照预定的速度和方向进行旋转。
三相无刷直流电机工作原理的关键在于电子线路的准确控制和
换向的实现,可以通过电子线路中的逻辑门、触发器、半导体等元件来实现精确的换向控制,从而保证电机的稳定运行和高效性能。
3相直流无刷电动机一、引言3相直流无刷电动机是一种高效、可靠且广泛应用的电动机。
它由转子、定子、磁极和电子调节器等组成,通过电子调节器控制电流和电压,实现电机的启动、运行和停止等功能。
本文将详细介绍3相直流无刷电动机的原理、结构、工作原理以及应用领域。
二、原理与结构1. 原理3相直流无刷电动机基于电磁感应原理工作。
当电流通过定子线圈时,产生的磁场与转子上的永磁体磁场相互作用,产生力矩使电机旋转。
通过改变电流的方向和大小,可以控制电机的转速和转向。
2. 结构3相直流无刷电动机由转子、定子、磁极和电子调节器等组成。
•转子:转子是电动机的旋转部分,通常由永磁体组成。
永磁体的磁场与定子线圈的磁场相互作用,产生力矩使电机旋转。
•定子:定子是电动机的静止部分,通常由若干个定子线圈组成。
定子线圈通过通电产生磁场与转子上的永磁体磁场相互作用,产生力矩使电机旋转。
•磁极:磁极是连接转子和定子的部分,用于传递磁场。
通常由磁性材料制成,能够有效传递磁场。
•电子调节器:电子调节器用于控制电机的电流和电压,实现电机的启动、运行和停止等功能。
它通常由功率开关、控制电路和传感器等组成。
三、工作原理3相直流无刷电动机的工作原理如下:1.启动:电子调节器通电,控制电机的电流和电压。
当电流通过定子线圈时,产生的磁场与转子上的永磁体磁场相互作用,产生力矩使电机旋转。
2.运行:电子调节器根据需要控制电机的电流和电压,调节电机的转速和转向。
通过改变电流的方向和大小,可以控制电机的转速和转向。
3.停止:电子调节器停止供电,电机停止旋转。
四、应用领域3相直流无刷电动机广泛应用于各个领域,包括但不限于以下几个方面:1.机械设备:3相直流无刷电动机常用于机械设备中,如机床、起重机、输送机等。
它们可以提供稳定的动力和精确的控制,提高设备的工作效率和精度。
2.汽车工业:3相直流无刷电动机在汽车工业中有广泛的应用。
它们可以用于驱动电动汽车、混合动力汽车和电动摩托车等,提供高效、低噪音的动力系统。
书山有路勤为径;学海无涯苦作舟
无刷直流电机(BLDC)构成及工作原理详解(附部
分生产厂家)
无刷直流电机(BLDC)是永磁式同步电机的一种,而并不是真正的直流电机,英文简称BLDC。
区别于有刷直流电机,无刷直流电机不使用机械的电刷装置,采用方波自控式永磁同步电机,以霍尔传感器取代碳刷换向器,以钕铁硼作为转子的永磁材料,性能上相较一般的传统直流电机有很大优势,是当今最理想的调速电机。
一、有刷直流电机简介
介绍无刷直流电机之前,我们来看看有刷电机:
直流电机以良好的启动性能、调速性能等优点着称,其中属于直流电机
一类的有刷直流电机采用机械换向器,使得驱动方法简单,其模型示意图如下图所示。
直流电机模型示意图
DC电机(有刷电机)的运转示意图
电机主要由永磁材料制造的定子、绕有线圈绕组的转子(电枢)、换
向器和电刷等构成。
只要在电刷的A和B两端通入一定的直流电流,电机的换向器就会自动改变电机转子的磁场方向,这样,直流电机的转子就会持续运转下去。
专注下一代成长,为了孩子。
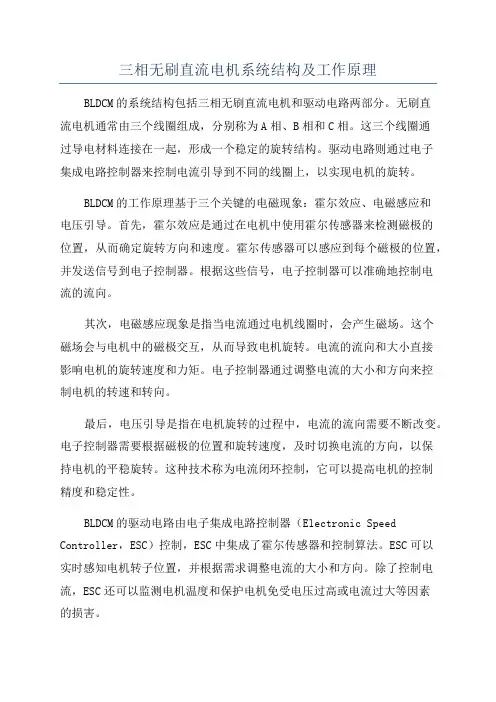
三相无刷直流电机系统结构及工作原理BLDCM的系统结构包括三相无刷直流电机和驱动电路两部分。
无刷直流电机通常由三个线圈组成,分别称为A相、B相和C相。
这三个线圈通过导电材料连接在一起,形成一个稳定的旋转结构。
驱动电路则通过电子集成电路控制器来控制电流引导到不同的线圈上,以实现电机的旋转。
BLDCM的工作原理基于三个关键的电磁现象:霍尔效应、电磁感应和电压引导。
首先,霍尔效应是通过在电机中使用霍尔传感器来检测磁极的位置,从而确定旋转方向和速度。
霍尔传感器可以感应到每个磁极的位置,并发送信号到电子控制器。
根据这些信号,电子控制器可以准确地控制电流的流向。
其次,电磁感应现象是指当电流通过电机线圈时,会产生磁场。
这个磁场会与电机中的磁极交互,从而导致电机旋转。
电流的流向和大小直接影响电机的旋转速度和力矩。
电子控制器通过调整电流的大小和方向来控制电机的转速和转向。
最后,电压引导是指在电机旋转的过程中,电流的流向需要不断改变。
电子控制器需要根据磁极的位置和旋转速度,及时切换电流的方向,以保持电机的平稳旋转。
这种技术称为电流闭环控制,它可以提高电机的控制精度和稳定性。
BLDCM的驱动电路由电子集成电路控制器(Electronic Speed Controller,ESC)控制,ESC中集成了霍尔传感器和控制算法。
ESC可以实时感知电机转子位置,并根据需求调整电流的大小和方向。
除了控制电流,ESC还可以监测电机温度和保护电机免受电压过高或电流过大等因素的损害。
总之,三相无刷直流电机是通过电子集成电路控制器来驱动的电机。
它具有高效率、低噪音和长寿命的特点。
其工作原理基于霍尔效应、电磁感应和电压引导等关键技术,通过电子控制器实现电流的精确控制和调节。
这种电机系统结构与传统的有刷直流电机相比,具有更大的优势和发展潜力。
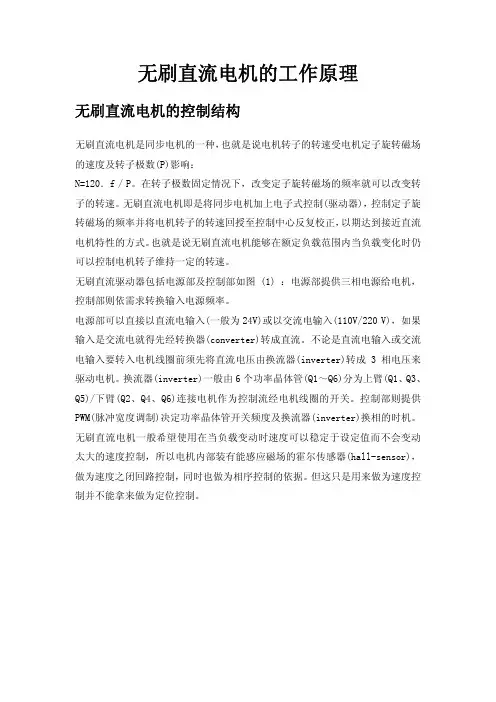
无刷直流电机的工作原理无刷直流电机的控制结构无刷直流电机是同步电机的一种,也就是说电机转子的转速受电机定子旋转磁场的速度及转子极数(P)影响:N=120.f / P。
在转子极数固定情况下,改变定子旋转磁场的频率就可以改变转子的转速。
无刷直流电机即是将同步电机加上电子式控制(驱动器),控制定子旋转磁场的频率并将电机转子的转速回授至控制中心反复校正,以期达到接近直流电机特性的方式。
也就是说无刷直流电机能够在额定负载范围内当负载变化时仍可以控制电机转子维持一定的转速。
无刷直流驱动器包括电源部及控制部如图 (1) :电源部提供三相电源给电机,控制部则依需求转换输入电源频率。
电源部可以直接以直流电输入(一般为24V)或以交流电输入(110V/220 V),如果输入是交流电就得先经转换器(converter)转成直流。
不论是直流电输入或交流电输入要转入电机线圈前须先将直流电压由换流器(inverter)转成3相电压来驱动电机。
换流器(inverter)一般由6个功率晶体管(Q1~Q6)分为上臂(Q1、Q3、Q5)/下臂(Q2、Q4、Q6)连接电机作为控制流经电机线圈的开关。
控制部则提供PWM(脉冲宽度调制)决定功率晶体管开关频度及换流器(inverter)换相的时机。
无刷直流电机一般希望使用在当负载变动时速度可以稳定于设定值而不会变动太大的速度控制,所以电机内部装有能感应磁场的霍尔传感器(hall-sensor),做为速度之闭回路控制,同时也做为相序控制的依据。
但这只是用来做为速度控制并不能拿来做为定位控制。
(图一)无刷直流电机的控制原理要让电机转动起来,首先控制部就必须根据hall-sensor感应到的电机转子目前所在位置,然后依照定子绕线决定开启(或关闭)换流器(inverter)中功率晶体管的顺序,如 下(图二) inverter中之AH、BH、CH(这些称为上臂功率晶体管)及AL、BL、CL(这些称为下臂功率晶体管),使电流依序流经电机线圈产生顺向(或逆向)旋转磁场,并与转子的磁铁相互作用,如此就能使电机顺时/逆时转动。
三相直流无刷电机
一、三相直流无刷电机
三相直流无刷电机是由三相交流电动机经过改装后,在电路上加装电子开关,将调速器和开关组合,从而形成一种能够根据电路控制短路电流和短路电压从而调整电机转速的新型电机。
它具有功率大、效率高、可靠性好、使用寿命长、结构简单、可调速范围广等优点,被广泛应用于电梯、机床、医疗器械、饮料机、压缩机等领域的调速驱动、控制用途。
二、三相直流无刷电机的工作原理
三相直流无刷电机的工作原理是通过交流电源的输入,由调速器把电源输入转换成直流电源,从而调节电机的转速。
当调速器调节电压的时候,供电电压的变化会导致交流电机的转速发生变化,从而改变电机的转速,从而达到控制的目的。
三、三相直流无刷电机的结构
三相直流无刷电机的结构由交流电机、调速器、控制电路和散热装置组成,其中调速器通过电路控制调节交流电机的转速,控制电路可以控制调速器的输出电压,从而改变电机的转速,散热装置可以将电机运行时产生的热量散发出去,以保证电机的可靠性和稳定性。
三相直流无刷电机工作原理一、前言三相直流无刷电机是一种高效率、低噪音、长寿命的电机,广泛应用于工业生产和家用电器中。
本文将详细介绍三相直流无刷电机的工作原理。
二、三相直流无刷电机的基本结构三相直流无刷电机由转子和定子两部分组成。
转子是由永磁体和轴承组成的,定子则是由线圈和磁铁组成的。
在转子上有多个永磁体,定子上也有多个线圈,且线圈分布在不同的位置上。
三、三相直流无刷电机的工作原理当外部施加一个电压时,定子中的线圈会产生一个旋转磁场。
这个旋转磁场与转子上的永磁体产生交互作用,使得转子开始旋转。
同时,在转子旋转过程中,不同位置上的线圈会依次被激励,产生不同方向和大小的电动势。
这些电动势将根据特定规律被送回控制器。
四、三相直流无刷电机控制器为了保证三相直流无刷电机正常运行,需要使用控制器来控制电机的转速和方向。
控制器的主要功能是将输入电压转换为适合电机使用的信号,并根据电机反馈信号调整输出信号。
控制器通常由三个部分组成:功率模块、驱动模块和控制模块。
五、三相直流无刷电机的优点相比传统的有刷直流电机,三相直流无刷电机具有以下几个优点:1. 高效率:由于无刷直流电机没有摩擦损耗和换向损耗,因此效率更高。
2. 低噪音:无刷直流电机在运行时噪音更小。
3. 长寿命:由于无刷直流电机没有磨损部件,因此寿命更长。
六、总结三相直流无刷电机是一种高效率、低噪音、长寿命的电机,由转子和定子两部分组成。
当外部施加一个电压时,定子中的线圈会产生一个旋转磁场,使得转子开始旋转。
同时,在转子旋转过程中,不同位置上的线圈会依次被激励,产生不同方向和大小的电动势。
这些反馈信号将被送回控制器,控制器将根据反馈信号调整输出信号以保证电机正常运行。
三相直流无刷电机相比传统的有刷直流电机具有高效率、低噪音和长寿命等优点。
三相无刷直流电机驱动原理一、引言三相无刷直流电机是一种广泛应用于工业和家电领域的电机,其驱动原理是通过电子器件实现电机转子的控制和驱动。
本文将从三相无刷直流电机的基本结构、工作原理以及驱动器件的选择和控制方法等方面进行介绍。
二、三相无刷直流电机的基本结构三相无刷直流电机由转子、定子和传感器组成。
转子是由永磁体组成,定子则由三组线圈(A、B、C相)和磁铁组成。
传感器用于检测转子位置,通常采用霍尔元件或光电传感器。
三、三相无刷直流电机的工作原理三相无刷直流电机通过交替激励定子线圈,产生磁场,使转子转动。
其工作原理可以简单描述为以下几个步骤:1. 传感器检测转子位置:传感器会实时检测转子的位置,并将检测结果反馈给控制器。
2. 控制器计算相应的电流:根据传感器反馈的转子位置信息,控制器会计算出相应的电流值,并将电流信号发送给电机驱动器。
3. 电机驱动器控制电流:电机驱动器根据控制器发送的电流信号,控制电流的大小和方向,使电机产生适当的转矩。
4. 电机转子运动:根据电机驱动器控制的电流信号,电机转子会按照一定的顺序和速度进行旋转。
5. 重复上述步骤:电机会不断地重复执行上述步骤,以保持转子的稳定转动。
四、三相无刷直流电机驱动器件的选择选择适合的驱动器件对于三相无刷直流电机的正常运行至关重要。
常用的驱动器件包括功率MOSFET、IGBT和功率集成电路等。
1. 功率MOSFET:功率MOSFET具有开关速度快、损耗小等特点,适合用于中低功率的电机驱动。
2. IGBT:IGBT具有较高的工作电压和工作温度范围,适合用于高功率电机驱动。
3. 功率集成电路:功率集成电路集成了多种功能和保护电路,能够提供更全面的电机驱动控制。
五、三相无刷直流电机的控制方法三相无刷直流电机的控制方法主要有霍尔传感器反馈控制和电动势反馈控制。
1. 霍尔传感器反馈控制:通过采集霍尔传感器检测的转子位置信息,实时调整电机驱动器的输出电流,以控制电机转速和转向。
三相无刷发电机原理三相无刷直流电机(BLDC)是目前工业自动化领域中广泛应用的一种电机类型,它具有高效率、高速度和高可靠性等优点。
下面将介绍三相无刷发电机的工作原理、结构、控制方式、特点和应用等方面。
一、工作原理三相无刷电机主要由永磁体、转子和定子等部分组成。
永磁体是提供转子磁通的部分,转子由永磁体包围,与永磁体之间构成气隙,转子内部装有磁极,是驱动电机的旋转部分;定子则由三个线圈(相)组成,每个线圈之间相隔120度,电机通过相序的变化来控制转子的转动。
三相无刷电机的工作原理和普通电机相似,即通过电磁感应和动电力作用来实现转子的转动。
在启动时,电机控制器提供电源(通常是直流电源),让电机的转子产生旋转磁场,在旋转磁场的作用下,定子线圈内的磁场也会产生旋转,由于定子线圈的磁场在旋转的过程中是不断变化的,因此会在定子线圈中产生感应电动势,进而引起电流流过定子线圈,产生动力作用,驱动转子进行旋转。
三相无刷电机的最大区别在于其转子没有驱动电源和电刷的设置,因此可以减少电刷和机械结构的摩擦损失,从而提高电机效率和寿命。
二、结构特点三相无刷电机的结构相对简单,主要由永磁体、转子和定子等部分组成。
其中永磁体是提供转子磁通的部分,它通常采用稀土永磁材料,能够提供强大的磁场,确保电机高效、低噪音和高可靠性的运行。
转子由永磁体包围,与永磁体之间构成气隙,转子内部装有磁极,是驱动电机的旋转部分;定子则由三个线圈(相)组成,每个线圈之间相隔120度,电机通过相序的变化来控制转子的转动。
三相无刷电机还具有以下优点:1. 无刷结构,减少机械结构和电刷的损耗,提高机械效率和寿命;2. 不需要传统的换向器,控制简单,能够实现高精度、高效率、高速度和高可靠性的转换;3. 由于不需要电刷和换向器,减少了电机的维护成本、噪音和电磁干扰,能够适用于高精度、低噪音、低振动和高可靠性的工业自动化领域。
三、控制方式三相无刷电机的控制方法主要分为霍尔传感器控制和无传感器控制两种。
三相无刷电机工作原理
三相无刷电机是一种效率高、噪音低、使用寿命长的电机类型,其工作原理如下:
1. 结构组成:三相无刷电机主要由定子、转子和传感器组成。
定子上布置有三个绕组,分别称为A相、B相和C相;转子
上固定有永磁体,可以通过电流传感器来检测转子的位置。
2. 换相:三相无刷电机通过换相来实现转子的转动。
换相是指根据转子位置的检测结果,依次对A、B、C三相绕组施加电流,从而产生电磁力驱动转子旋转。
根据电流的正负变化和转子的位置,可以实现电流的相序依次变化,从而推动转子旋转。
3. 传感器:三相无刷电机中的传感器用于检测转子的位置。
一般采用霍尔元件或磁编码器作为传感器,通过检测永磁体的磁场来确定转子的位置。
传感器将转子的位置信息传递给驱动器,以实现电流的正确施加和换相控制。
4. 驱动器:驱动器是控制三相无刷电机工作的核心部件,通过接收传感器的信号,计算出正确的电流控制信号,并按时序、相序和电流大小等要求驱动三相绕组。
驱动器可以使用硬件或软件实现。
综上所述,三相无刷电机通过换相控制和根据转子位置的反馈信息,实现转子的旋转。
其中,换相控制通过驱动器根据传感器信号来实现,而传感器则用于检测转子的位置信息。
这种工作原理使得三相无刷电机在各种应用中都有广泛的应用。
三相无刷直流电机系统结构及工作原理2.1电机的分类电机按工作电源种类可分为:1.直流电机:(1)有刷直流电机:①永磁直流电机:·稀土永磁直流电动机;·铁氧体永磁直流电动机;·铝镍钴永磁直流电动机;②电磁直流电机:·串励直流电动机;·并励直流电动机;·他励直流电动机;·复励直流电动机;(2)无刷直流电机:稀土永磁无刷直流电机;2.交流电机:(1)单相电动机;(2)三相电动机。
2.2无刷直流电机特点·电压种类多:直流供电交流高低电压均不受限制。
·容量范围大:标准品可达400Kw更大容量可以订制。
·低频转矩大:低速可以达到理论转矩输出启动转矩可以达到两倍或更高。
·高精度运转:不超过1 rpm.(不受电压变动或负载变动影响)。
·高效率:所有调速装置中效率最高比传统直流电机高出5~30%。
·调速范围:简易型/通用型(1:10)高精度型(1:100)伺服型。
·过载容量高:负载转矩变动在200%以内输出转速不变。
·体积弹性大:实际比异步电机尺寸小可以做成各种形状。
·可设计成外转子电机(定子旋转)。
·转速弹性大:可以几十转到十万转。
·制动特性良好可以选用四象限运转。
·可设计成全密闭型IP-54IP-65防爆型等均可。
·允许高频度快速启动电机不发烫。
·通用型产品安装尺寸与一般异步电机相同易于技术改造。
2.3无刷直流电机的组成直流无刷电动机的结构如图2.1所示。
它主要由电动机本体、位置传感器和电子开关线路三部分组成。
电动机本体在结构上与永磁同步电动机相似,但没有笼型绕组和其他起动装置。
其定子绕组一般制成多相(三相、四相、无相不等),转子由永久磁钢按一定极对数(2p=2,4,…)组成。
图2.1 直流无刷电动机的结构原理图当定子绕组的某一相通电时,该电流与转子永久磁钢的磁极所产生的磁场相互作用而产生的转矩,驱动转子旋转,再由位置传感器将转子磁钢位置变换成电信号,去控制电子开关电路,从而使定子各相绕组按一定顺序导通,定子相电流随转子位置转子位置的变化而按一定的次序换相。
无刷直流电机的工作原理无刷直流电机的控制结构无刷直流电机是同步电机的一种,也就是说电机转子的转速受电机定子旋转磁场的速度及转子极数(P)影响:N=120.f / P。
在转子极数固定情况下,改变定子旋转磁场的频率就可以改变转子的转速。
无刷直流电机即是将同步电机加上电子式控制(驱动器),控制定子旋转磁场的频率并将电机转子的转速回授至控制中心反复校正,以期达到接近直流电机特性的方式。
也就是说无刷直流电机能够在额定负载范围内当负载变化时仍可以控制电机转子维持一定的转速。
无刷直流驱动器包括电源部及控制部如图 (1) :电源部提供三相电源给电机,控制部则依需求转换输入电源频率。
电源部可以直接以直流电输入(一般为24V)或以交流电输入(110V/220 V),如果输入是交流电就得先经转换器(converter)转成直流。
不论是直流电输入或交流电输入要转入电机线圈前须先将直流电压由换流器(inverter)转成3相电压来驱动电机。
换流器(inverter)一般由6个功率晶体管(Q1~Q6)分为上臂(Q1、Q3、Q5)/下臂(Q2、Q4、Q6)连接电机作为控制流经电机线圈的开关。
控制部则提供PWM(脉冲宽度调制)决定功率晶体管开关频度及换流器(inverter)换相的时机。
无刷直流电机一般希望使用在当负载变动时速度可以稳定于设定值而不会变动太大的速度控制,所以电机内部装有能感应磁场的霍尔传感器(hall-sensor),做为速度之闭回路控制,同时也做为相序控制的依据。
但这只是用来做为速度控制并不能拿来做为定位控制。
(图一)无刷直流电机的控制原理要让电机转动起来,首先控制部就必须根据hall-sensor感应到的电机转子目前所在位置,然后依照定子绕线决定开启(或关闭)换流器(inverter)中功率晶体管的顺序,如 下(图二) inverter中之AH、BH、CH(这些称为上臂功率晶体管)及AL、BL、CL(这些称为下臂功率晶体管),使电流依序流经电机线圈产生顺向(或逆向)旋转磁场,并与转子的磁铁相互作用,如此就能使电机顺时/逆时转动。
图文讲解无刷直流机电的工作原理之答禄夫天创作时间:二O二一年七月二十九日导读:无刷直流机电由电念头主体和驱动器组成,是一种典范的机电一体化产物. 电念头的定子绕组多做成三相对称星形接法,同三相异步电念头十分相似.它的应用非常广泛,在很多机电一体化设备上都有它的身影.什么是无刷机电?无刷直流机电由电念头主体和驱动器组成,是一种典范的机电一体化产物.由于无刷直流电念头是以自控式运行的,所以不会像变频调速下重载启动的同步机电那样在转子上另加启动绕组,也不会在负载突变时发生振荡和失步.中小容量的无刷直流电念头的永磁体,现在多采纳高磁能级的稀土钕铁硼(NdFeB)资料.因此,稀土永磁无刷电念头的体积比同容量三相异步电念头缩小了一个机座号.无刷直流电念头是采纳半导体开关器件来实现电子换向的,即用电子开关器件取代传统的接触式换向器和电刷.它具有可靠性高、无换向火花、机械噪声高等优点,广泛应用于高档录音座、录像机、电子仪器及自动化办公设备中.无刷直流电念头由永磁体转子、多极绕组定子、位置传感器等组成.位置传感按转子位置的变动,沿着一定次第对定子绕组的电流进行换流(即检测转子磁极相对定子绕组的位置,并在确定的位置处发生位置传感信号,经信号转换电路处置后去控制功率开关电路,按一定的逻辑关系进行绕组电流切换).定子绕组的工作电压由位置传感器输出控制的电子开关电路提供.位置传感器有磁敏式、光电式和电磁式三种类型.采纳磁敏式位置传感器的无刷直流电念头,其磁敏传感器件(例如霍尔元件、磁敏二极管、磁敏诂极管、磁敏电阻器或专用集成电路等)装在定子组件上,用来检测永磁体、转子旋转时发生的磁场变动.采纳光电式位置传感器的无刷直流电念头,在定子组件上按一定位置配置了光电传感器件,转子上装有遮光板,光源为发光二极管或小灯胆.转子旋转时,由于遮光板的作用,定子上的光敏元器件将会按一定频率间歇间生脉冲信号.采纳电磁式位置传感器的无刷直流电念头,是在定子组件上装置有电磁传感器部件(例如耦合变压器、接近开关、LC谐振电路等),当永磁体转子位置发生变动时,电磁效应将使电磁传感器发生高频调制信号(其幅值随转子位置而变动).看看这个工程师怎么说?首先给年夜家复习几个基础定章:左手定章、右手定章、右手螺旋定章.别懵逼,我下面会给年夜家解释.左手定章,这个是机电转动受力分析的基础,简单说就是磁场中的载流导体,会受到力的作用.让磁感线穿过手掌正面,手指方向为电流方向,年夜拇指方向为发生磁力的方向,我相信喜欢玩模型的人都还有一定物理基础的哈哈.右手定章,这是发生感生电动势的基础,跟左手定章的相反,磁场中的导体因受到力的牵引切割磁感线发生电动势.让磁感线穿过掌心,年夜拇指方向为运动方向,手指方向为发生的电动势方向.为什么要讲感生电动势呢?不知道年夜家有没有类似的经历,把机电的三相线合在一起,用手去转念头电会发现阻力非常年夜,这就是因为在转念头电过程中发生了感生电动势,从而发生电流,磁场中电流流过导体又会发生和转动方向相反的力,年夜家就会感觉转动有很年夜的阻力.不信可以试试.三相线分开,机电可以轻松转动三相线合并,机电转动阻力非常年夜右手螺旋定章,用右手握住通电螺线管,使四指弯曲与电流方向一致,那么年夜拇指所指的那一端就是通电螺旋管的N极.这个定章是通电线圈判断极性的基础,红色箭头方向即为电流方向.看完了三年夜定章,我们接下来先看看机电转动的基来源根基理.第一部份:直流机电模型我们找到一个中学物理学过的直流机电的模型,通过磁回路分析法来进行一个简单的分析.状态1当两头的线圈通上电流时,根据右手螺旋定章,会发生方向指向右的外加磁感应强度B(如粗箭头方向所示),而中间的转子会尽量使自己内部的磁感线方向与外磁感线方向坚持一致,以形成一个最短闭合磁力线回路,这样内转子就会按顺时针方向旋转了.当转子磁场方向与外部磁场方向垂直时,转子所受的转动力矩最年夜.注意这里说的是“力矩”最年夜,而不是“力”最年夜.固然,在转子磁场与外部磁场方向一致时,转子所受磁力最年夜,但此时转子呈水平状态,力臂为0,固然也就不会转动了.弥补一句,力矩是力与力臂的乘积.其中一个为零,乘积就为零了.当转子转到水平位置时,虽然不再受到转动力矩的作用,但由于惯性原因,还会继续顺时针转动,这时若改变两头螺线管的电流方向,如下图所示,转子就会继续顺时针向前转动,状态2如此不竭改变两头螺线管的电流方向,内转子就会不竭转起来了.改变电流方向的这一举措,就叫做换相.弥补一句:何时换相只与转子的位置有关,而与其他任何量无直接关系.第二部份:三相二极内转子机电一般来说,定子的三相绕组有星形联结方式和三角联结方式,而“三相星形联结的二二导通方式”最为经常使用,这里就用该模型来做个简单分析.上图显示了定子绕组的联结方式(转子未画出假想是个二极磁铁),三个绕组通过中心的连接点以“Y”型的方式被联结在一起.整个机电就引出三根线A, B, C.当它们之间两两通电时,有6种情况,分别是AB, AC, BC, BA, CA, CB注意这是有顺序的.下面我看第一阶段:AB相通电当AB相通电,则A极线圈发生的磁感线方向如红色箭头所示,B 极发生的磁感线方向如图蓝色箭头所示,那么发生的合力方向即为绿色箭头所示,那么假设其中有一个二极磁铁,则根据“中间的转子会尽量使自己内部的磁感线方向与外磁感线方向坚持一致”则N极方向会与绿色箭头所示方向重合.至于C,暂时没他什么事.第二阶段:AC相通电第三阶段:BC相通电第三阶段:BA相通电为了节省篇幅,我们就纷歧一描述CA\CB的模型,年夜家可以自己类推一下.以下为中间磁铁(转子)的状态图:每个过程转子旋转60度六个过程即完成了完整的转动,其中6次换相.第三部份:三相多绕组多极内转子机电我们再来看一个复杂点的,图(a)是一个三相九绕组六极(三对极)内转子机电,它的绕组连线方式见图 (b).从图(b)可见,其三相绕组也是在中间点连接在一起的,也属于星形联结方式.一般而言,机电的绕组数量都和永磁极的数量是纷歧致的(比如用9绕组6极,而不是6绕组6极),这样是为了防止定子的齿与转子的磁钢相吸对齐.其运动的原则是:转子的N极与通电绕组的S极有对齐的运动趋势,而转子的S极与通电绕组的N极有对齐的运动趋势.即为S与N相互吸引,注意跟之前的分析方法有一定的区别.好吧,还是再帮年夜家分析一下吧,第一阶段:AB相通电第二阶段:AC相通电第三阶段:BC相通电第四阶段:BA通电第五阶段:CA通电第六阶段:CB通电以上为六个分歧的通电状态,其中经历了五个转动过程.每个过程为20度.第四部份:外转子无刷直流机电看完了内转子无刷直流机电的结构,我们来看外转子的.其区别就在于,外转子机电将原来处于中心位置的磁钢做成一片片,贴到了外壳上,机电运行时,是整个外壳在转,而中间的线圈定子不动.外转子无刷直流机电较内转子来说,转子的转动惯量要年夜很多(因为转子的主要质量都集中在外壳上),所以转速较内转子机电要慢,通常KV值在几百到几千之间.也是航模主要运用的无刷机电顺便啰嗦一下吧.无刷机电KV值界说为:转速/V,意思为输入电压每增加1伏特,无刷机电空转转速增加的转速值.比如说,标称值为1000KV的外转子无刷机电,在11伏的电压条件下,最年夜空载转速即为:11000rpm(rpm的含义是:转/分钟).同系列同外形尺寸的无刷机电,根据绕线匝数的几多,会暗示出分歧的KV特性.绕线匝数多的,KV值低,最高输出电流小,扭力年夜;绕线匝数少的,KV值高,最高输出电流年夜,扭力小.我先前测试过穿越机2204机电的极限电流,单机电能彪上25A,而2212系列机电15A都上不了.外转子无刷直流机电的结构:分析方法也和内转子机电类似,年夜家可以自己分析一下,根据右手螺旋定理判断线圈的N/S极,转子永磁体的N极与定子绕组的S极有对齐(吸引)的趋势,转子永磁体的S极与定子绕组的N极有对齐(吸引)的趋势,从而驱念头电转动.经典无刷机电2212 1000kv机电结构分析.图为DJI 2312S机电和XXD 2212机电的(解剖图)其结构如下:定子绕组固定在底座上,转轴和外壳固定在一起形成转子,拔出定子中间的轴承.图为xxd2212线圈拆解图图为12绕组14极(即7对极),机电绕组绕发图.后面画出了6种两相通电的情形,可以看出,尽管绕组和磁极的数量可以有许多种变动,但从电调控制的角度看,其通电次第其实是相同的,也就是说,不论外转子还是内转子机电,都遵循AB>AC>BC>BA>CA>CB的顺序进行通电换相.固然,如果你想让机电反转的话,电子方法是按倒过来的次第通电;物理方法直接对换任意两根线,假设A和B对换,那么顺序就是BA>BC>AC>AB>CB>CA,年夜家有没有发现这里顺序就完全倒过来了.AB相通电AC相通电BC相通电BA相通电CA相通电CB相通电要说明一下的是,由于每根引出线同时接入两个绕组,所以电流是分两路走的.这里为使问题尽量简单化,下面几个图中只画出了主要一路的电流方向,还有一路电流未画出,另一路电流的具体情况放在后面进行分析,涉及到电路检测换相位置.。
三相无刷直流电机系统结构工作原理一、系统结构1.电机本体:三相无刷直流电机由定子和转子两部分组成。
定子由三个相位的线圈组成,线圈之间呈120度电角度偏移,形成三相交错磁场。
转子由永磁体组成,通过磁铁吸引和排斥作用与定子交互作用,从而实现转动。
2.电机驱动器:电机驱动器是电机控制系统的核心部分,主要由功率电子器件(MOSFET、IGBT等)和控制电路组成。
驱动器的主要功能是将输入电源的直流电转换为交流电,控制电流和电压的大小和方向,并控制开关动作,实现对电机转矩和速度的精确控制。
3.电机控制器:电机控制器是系统的智能控制部分,主要由控制算法、传感器和接口电路组成。
控制器根据输入信号和传感器反馈信号实时调整驱动器的输出,控制电机的转矩和速度,并根据需要实现正反转、加减速、过流保护等功能。
二、工作原理1.电磁感应原理:当电机外加电压施加在定子线圈上时,通过定子线圈产生的交错磁场与转子永磁体的磁场相互作用,产生电磁感应力,将电能转换为机械能。
2.电流反馈原理:三相无刷直流电机通过电流传感器实时监测和反馈驱动电流,以实现电机转矩和速度的闭环控制。
控制器根据电流反馈信号调节驱动器的输出电压和频率,实现对电机的精确控制。
具体工作过程如下:(1)起动过程:当电机启动时,控制器向驱动器发送起始脉冲信号,驱动器将输入直流电压转换为三相交流电压,形成旋转磁场,推动转子开始转动。
(2)速度控制过程:控制器通过调节驱动器的输出电压和频率,控制电机的转矩和速度。
当控制器需求增加转矩或速度时,通过增加驱动器的输出电压和频率实现;当控制器需求减小转矩或速度时,通过减小驱动器的输出电压和频率实现。
(3)回馈控制过程:电流传感器实时监测和反馈电机驱动电流的大小,控制器根据电流反馈信号调整驱动器的输出,实现电机转矩和速度的闭环控制。
当电机负载变化或工作环境发生变化时,控制器根据电流反馈信号及时调整电机驱动参数,保持电机的稳定运行。
(4)保护机制:电机控制器还包含了多种保护功能,如过流保护、过压保护和过温保护等,以保证电机系统的安全运行。
无刷直流电机的组成及工作原理无刷直流电机,也称作无刷直流电机或电子换向无刷电机,是一种通过电子换向控制电机转子磁场和电枢绕组之间的相互作用来实现电机运行的电机。
与传统的直流电机相比,无刷直流电机具有结构简单、寿命长、噪音低、效率高等优势,在工业自动化、机械设备、汽车等领域有着广泛的应用。
1.转子:转子是无刷直流电机的旋转部分,它由永磁体和转子轴构成。
转子轴连接旋转部件,传递转矩。
2.定子:定子是无刷直流电机的固定部分,它由电枢绕组和磁场极轴构成。
定子电枢绕组通过电流传递电能,产生磁场。
3.电子换向控制系统:电子换向控制系统包括电子换向器、位置传感器及控制电路。
位置传感器用于检测转子位置,将信号传递给电子换向器。
电子换向器根据转子位置信号控制电流方向和大小,实现转子磁场与电枢绕组之间的相互作用。
4.电源系统:无刷直流电机需要直流电源来提供电流供电。
电源系统可以由直流电池、整流器和相关电路组成。
具体而言1.位置检测:电机的位置传感器(通常采用霍尔传感器)检测转子的位置,并将该信息传递给电子换向器。
2.相序切换:电子换向器根据转子位置信号,通过对电流的控制,按照预定的相序切换规律,控制定子绕组中的电流方向和大小。
3.磁场生成:定子绕组中的电流通过电子换向器控制的方式,产生磁场。
磁场的方向和大小由电流方向和大小决定。
4.磁场作用:转子上的永磁体产生的磁场与定子绕组中的磁场相互作用,使转子受到力矩作用,开始旋转。
5.旋转控制:电子换向器不断改变定子绕组中电流的方向和大小,使得磁场方向和大小也改变,进而改变转子受到的力矩方向和大小。
通过控制电流,可以实现电机的转速和负载的控制。
总之,无刷直流电机通过电子换向控制系统控制磁场和电枢绕组之间的相互作用,实现电机的运转。
通过不断改变电流方向和大小,可以控制电机的速度和输出扭矩。
三相无刷直流电机系统结构及工作原理2.1 电机的分类电机按工作电源种类可分为:1.直流电机:(1)有刷直流电机:①永磁直流电机:·稀土永磁直流电动机;·铁氧体永磁直流电动机;·铝镍钴永磁直流电动机;②电磁直流电机:·串励直流电动机;·并励直流电动机;·他励直流电动机;·复励直流电动机;(2)无刷直流电机:稀土永磁无刷直流电机;2.交流电机:(1)单相电动机;(2)三相电动机。
2.2 无刷直流电机特点·电压种类多 : 直流供电交流高低电压均不受限制。
·容量范围大 : 标准品可达 400Kw更大容量可以订制。
·低频转矩大 : 低速可以达到理论转矩输出启动转矩可以达到两倍或更高。
·高精度运转 : 不超过 1 rpm.( 不受电压变动或负载变动影响) 。
·高效率 : 所有调速装置中效率最高比传统直流电机高出5~30%。
·调速范围 : 简易型 / 通用型 (1:10) 高精度型 (1:100) 伺服型。
·过载容量高 : 负载转矩变动在200%以内输出转速不变。
·体积弹性大 : 实际比异步电机尺寸小可以做成各种形状。
·可设计成外转子电机 ( 定子旋转 ) 。
·转速弹性大 : 可以几十转到十万转。
·制动特性良好可以选用四象限运转。
·可设计成全密闭型IP-54IP-65防爆型等均可。
·允许高频度快速启动电机不发烫。
·通用型产品安装尺寸与一般异步电机相同易于技术改造。
2.3 无刷直流机的成直流无刷机的构如 2.1 所示。
它主要由机本体、位置感器和子开关路三部分成。
机本体在构上与永磁同步机相似,但没有型和其他起装置。
其定子一般制成多相(三相、四相、无相不等),子由永久磁按一定极数( 2p=2,4 ,⋯)成。
图 2.1直流无刷电动机的结构原理图当定子的某一相通,流与子永久磁的磁极所生的磁相互作用而生的矩,子旋,再由位置感器将子磁位置成信号,去控制子开关路,从而使定子各相按一定序通,定子相流随子位置子位置的化而按一定的次序相。
由于子开关路的通次序是与子角同步的,因而起到了机械向器的相作用。
如 2.2 所示。
图 2.2无刷直流电动机基本结构图因此,所直流无刷机,就其基本构而言,可以是一台由子开关路、永磁式同步机以及位置感器三者成的“ 机系” 。
其原理框如 2.3 所示。
直流电源开关电路电动机位置传感器图 2.3直流无刷电动机的原理框图位置传感器在直流无刷电动机中起着测定转子磁极位置的作用,为逻辑开关电路提供正确的换相信息,即将转子磁钢磁极的位置信号转换成电信号,然后去控制定子绕组换相。
位置传感器种类较多,且各具特点。
在直流无刷电动机中常见的位置传感器有以下几种:电磁式位置传感器、光电式位置传感器、磁敏式位置接近传感器【3】。
2.4 基本工作原理众所周知,一般的永磁式直流电动机的定子由永久磁钢组成,其主要的作用是在电动机气隙中产生磁场。
其电枢绕组通电后产生反应磁场。
其电枢绕组通电后产生反应磁场。
由于电刷的换向作用,使得这两个磁场的方向在直流电动机运行的过程中始终保持相互垂直,从而产生最大转矩而驱动电动机不停地运转。
直流无刷电动机为了实现无电刷换相,首先要求把一般直流电动机的电枢绕组放在定子上,把永磁磁钢放在转子上,这与传统直流永磁电动机的结构刚好相反。
但仅这样做还是不行的,因为用一般直流电源给定子上各绕组供电,只能产生固定磁场,它不能与运动中转子磁钢所产生的永磁磁场相互作用,以产生单一方向的转矩来驱动转子转动。
所以,直流无刷电动机除了由定子和转子组成电动机本体以外,还要由位置传感器、控制电路以及功率逻辑开关共同构成的换相装置,使得直流无刷电动机在运行过程中定子绕组所产生的的磁场和转动中的转子磁钢产生的永磁磁场,在空间始终保持在(π/2 ) rad 左右的电角度。
2.5 无刷直流电机参数本系统采用的无刷电机参数·额定功率: 100W·额定电压: 24V(DC)·额定转速: 3000r/min·额定转矩: 0.23N?m·最大转矩: 0.46N?m·定位转矩: 0.01N?m·额定电流: 4.0A·最大电流: 8.0A·极数: 4·霍感器位置呈60°放置2.6 三相无刷机主路及工作方式无刷直流机有多相构,每种机可分半和全,全又可分星形和三角形以及不同的通方式。
因此,不同的会使机生不同的性能和成本,是每一个用系者都要考的。
下面做一下比。
(1)的利用率。
与普通直流机不同,无刷直流机的是断通的。
适当地提高通利用率可以使同通体数增加,使阻下降,提高效率。
从个角度来看,三相比四相好,四相比无相好,全比半好。
(2)矩的波。
无刷直流机的出矩波比普通直流机的大,因此希望尽量减小矩波。
一般相数越多,矩的波越小。
全比半矩的波小。
(3)路的成本。
相数越多,路所使用的开关管越多,成本越高。
全比半所使用的开关管多一倍,因此成本要高。
多相机的构复,成本也高【9】。
合上述分析,本系采用三相星形(Y)全控路,如 2.4 。
图 2.4三相星形(Y)联结绕组三相全控桥式电路片机入控制信号到 LM621的入端,通内部之后控制信号被加到功率MOSFET的极,通控制信号 MOSFET的开关,只要片机控制好各相出的相位关系在子到合适的位置后行相,就能在片机端口出 TTL 平的候出端将高信号直接加到无刷直流机的相相的上。
在三相逆路中,用最多的是如 2.4 所示的三相式全控逆路。
在路中,机的三相星形( Y)。
VF1、VF2、⋯、 VF6 六只MOSFET功率管,起的开关作用。
他的通方式又可分两两通和三三通两种方式。
1.两两通方式所两两通方式是指每一瞬有两个功率管通,每隔 1/ 6 周期( 60°角度)相一次,每次相一个功率管,每一功率管通 120° 角度。
各功率管的通序是 VF1VF2、 VF2VF3、VF3VF4、VF4VF5、 VF5VF6、 VF6VF1、⋯。
当功率管 VF1和 VF2通,流从 VF1管流入 A 相,再从 C相流出,VF2管回到源。
如果定流入的流所生的矩正,那么从流出所生的矩,它合成的矩如 2.5 ( a)所示,其大小3 Ta,方向在 Ta 和- Tc 的角平分上。
当机 60°后,由 VF1VF2通成 VF2VF3通。
,流从 VF3流入 B 相再从 C相流出, VF2回到源,此合成的矩如 2.5 (b)所示,其大小同3 Ta。
但合成矩 Tbc 的方向了 60° 角度,而后每次相一个功率管,合成矩矢量方向就随着60° 角度,但大小始保持3 Ta 不。
2.5 (c)示出了全部合成矩的方向。
图2.5 星形( Y )联结绕组两两通电时的合成转矩矢量图(a) VF1、 VF2导通时合成转矩;( b) VF2、V F3 导通时合成转矩;(c)两两通电时合成转矩矢量图所以,同一台无刷直流机,每相通与三相半控路同的流,采用三相星形( Y)全控路,在两两相的情况下,其合成矩增加了 3 倍。
每隔60° 角度向一次,每个功率管通120°,每个通240°,其中正相通和反相通各 120°,其出矩波形如 2.6 所示。
由 2.6 可以看出,三相全控的矩波比三相半控小得多。
如将三只霍感器按相位差 120°安装,它所生的波形如 2.(7 a)所示。
其相的控制路可由一片 74LS138 型 3-8 器和 74LS09、 74LS38两片路构成,本系采用无刷直流机用集成芯片LM621 控制,如2.7(b)所示。
图 2.6全控桥输出波形图( a)(b)图 2.7全控桥两两通电电路原理示意图( a)传感器输出波形;(b)原理示意图2.三三通方式所三三通方式,是指每一瞬均有三只功率管同通,每隔60°相一次,每个功率管通 180°。
它的通次序是 VF1VF2VF3、VF2VF3VF4、VF3VF4VF5、VF4VF5VF6、VF5VF6VF1、VF6VF1VF2、VF1VF2VF3、⋯。
当 VF6VF1VF2 通,流从 VF1流入 A 相, B 相和 C 相( B、C两相并)分从 VF6 和 VF2 流出。
流 B 相和 C 相的流分流 A 相的 1/2 ,其合成矩如2.8 (a)所示,其方向与 A 相相同,而大小1.5Ta 。
60° 角度后,相到 VF1VF2VF3通,即先关断 VF6而后通 VF3 (注意,一定要先关 VF6 而后通 VF3,否就会出 VF6和 VF3同通,源被短路,是不允的)。
流分从 VF1和 VF3流入, A 相和 B 相(相当于 A 相和 B 相并)再流入 C 相, VF2流出,合成矩如2.8 ( b)所示,其方向与 -C 相同,子再 60° 角度后大小仍 1.5Ta 。
再 60° 角度后,相到 VF2VF3VF4通,而后依次推,循往复。
它的合成矩矢量如 2.8 (c)所示。
图2.8 三三通电时的合成转矩矢量图(a) VF6VF1VF2导通时合成转矩;( b) VF1VF2VF3导通时合成转矩;(c)三三通电时的合成转矩在种通方式里,每瞬均有三个功率管通。
每隔 60° 相一次,每次有一个功率管相,每个功率管通180°。
从某一相上看,星形(Y)三三通方式一相波形如2.9 所示。
图 2.9星形(Y)联结三三通电方式一相电压波形此外,根据直流侧电源性质的不同可分为两种:直流侧是电压源的称为电压型逆变电路,直流侧是电流源的称为电流型逆变电路。
它们各有特点,本系统使用电压型逆变电路,它有以下特点:(1)直流侧为电压源,或接有大电容,相当于电压源,直流侧电压基本无脉动,直流回路呈现低阻抗。
(2)由于直流电压源的钳位作用,交流侧电压波形为矩形波,并且与阻抗角无关,而交流侧电流波形和相位因负载阻抗角而异。
(3)当交流侧为阻感性负载时需提供无功功率,直流侧电容起缓冲无功能量的作用,为了给交流侧反馈的无功能量提供通道,逆变桥给臂都并联反馈二极管【8】。
电压型逆变电路主要用于两方面:①笼式交流电动机变频调速系统。
由于逆变电路只具有单方向传递电能的功能,故比较适用于稳态运行、无需频繁起制动和加、减速的场合。
②不停电电源。
该电源在逆变入端并接蓄电池,类似于电压源。