基于变分网格的曲面简化高效算法
- 格式:pdf
- 大小:780.71 KB
- 文档页数:10
建筑设计中曲面网格的划分方式及优化策略建筑设计中曲面网格的划分方式及优化策略一、引言建筑设计中,曲面网格的划分是一个关键的步骤,能够影响建筑物外形的流畅性、结构的稳定性以及施工的困难程度。
因此,合理的曲面网格划分方式和优化策略对于建筑设计的成功至关重要。
本文将介绍几种常见的曲面网格划分方式,并讨论一些优化策略。
二、曲面网格划分方式1. 均匀划分均匀划分是一种较为简单直接的划分方式,将曲面分成等大小的小面片。
这种方式适用于形状简单、平面性强的曲面,能够快速构建曲面网格。
然而,在曲面形状复杂或者曲面上存在规律性变化的情况下,均匀划分方式可能无法充分利用网格点,导致网格精度不高。
2. 均匀切割划分均匀切割划分是一种常见的曲面网格划分方式,通过将曲面切割成若干个小块,并在各个小块上采用均匀网格的方式,实现整体的曲面网格。
这种方式提供了更高的网格精度和平滑性,适用于较复杂的曲面形状。
3. 自适应划分自适应划分方式根据曲面上的变化程度来调整网格的密度,以使网格更好地适应曲面的复杂性。
例如,在曲面上的锐角和平面区域附近使用较密的网格,而在曲面上的平滑区域则采用较稀疏的网格。
自适应划分方式能够在保证网格精度的同时,减少网格数量,提高计算效率。
三、曲面网格优化策略1. 网格平滑曲面网格划分后,常常存在网格点之间的不平滑现象。
为了提高网格的平滑性,可以通过一些优化策略进行调整。
例如,使用曲线插值或者曲面拟合等方法,对网格进行局部调整,以消除不平滑部分。
2. 网格剖分在某些需要高精度曲面表达的区域,可以通过网格剖分策略进行优化。
网格剖分是指在曲面局部区域进行重复划分,以提高局部区域的曲面精度。
这种策略常用于建筑物的装饰部分,例如外墙砖面贴装等。
3. 网格调整在曲面网格划分中,边界网格的位置和精度往往是关键问题。
因此,在曲面网格优化中,需要特别关注边界网格的调整。
通过一些算法和方法,可以对边界网格进行调整,以满足设计要求。
基于曲面展开的自由曲面网格划分潘炜;吴慧;李铁瑞;高博青【期刊名称】《浙江大学学报(工学版)》【年(卷),期】2016(050)010【摘要】为了实现自由曲面的网格划分,提出基于曲面展开和映射思想的网格划分方法。
自由曲面参数域的2个方向分别等分,将等分点映射回空间曲面以在曲面上形成矩形点阵,则曲面的展开等效为矩形点阵的映射展开,以参数域对角线所对应的空间曲面对角线为展开基线,按照展开前、后面积变化最小的基本原则,对自由曲面由中心逐层向外展开。
该种展开方式能够很好地反映曲面的形状、走向及面积分布;展开的点阵通过拟合形成有边界的二维平面,将二维平面从中心点等角度分成6部分,考虑不同的边界情形,依次对每部分采用线推进方法逐层生成三角形网格,最终实现完整平面的网格生成。
该种平面网格划分方式更具操作性,效果更流畅;二维平面的网格根据拓扑不变性,映射回自由曲面形成空间曲面网格。
该方法生成的网格线条流畅、大小均匀,有较好的适用性。
【总页数】7页(P1973-1979)【作者】潘炜;吴慧;李铁瑞;高博青【作者单位】浙江大学建筑工程学院,浙江杭州 310058;浙江财经大学城乡规划与管理学院,浙江杭州310018;浙江大学建筑工程学院,浙江杭州 310058;浙江大学建筑工程学院,浙江杭州 310058【正文语种】中文【中图分类】TU311【相关文献】1.基于Projector的曲面展开程序开发与应用 [J], 顾燕;程洋;葛常清2.一种基于能量法的自由曲面展开算法 [J], 雷军鹏3.基于力学模型的曲面展开通用算法 [J], 梁堰波;徐伟辰;李吉刚;杨钦4.基于曲面拟合的复杂自由曲面网格划分 [J], 陈礼杰;吴慧;李铁瑞;高博青5.多点成形板类件自由曲面展开尺寸误差分析 [J], 张冬娟;李明哲;崔振山因版权原因,仅展示原文概要,查看原文内容请购买。

收稿日期:2009年9月基于网格化局部差值拟合的自由曲面加工路径规划方法王怡然,刘日良,张承瑞山东大学;高效洁净机械制造教育部重点实验室摘要:基于网格化局部插值拟合的曲面加工路径规划方法是在传统的等参数离散法基础上,对离散的密集的刀心点云进行网格化重新规划。
提出了一种对刀心点云投影并进行网格化的新方法。
在网格点局部根据临近的刀心点进行局部插值拟合的方法得到新的刀心点,在保证刀心点集能够满足重建要求的前提下,使加工路径规则化。
可以根据误差计算公式对网格密度和离散密度进行判断和调整以实现优化。
关键词:自由曲面;数控加工;路径规划;C AM 中图分类号:TG702 文献标志码:AGrid -based Local Interpolation and Fitting for Free -form SurfaceMachining Path Planning MethodWang Yiran,Liu Riliang,Zhang ChengruiAbstract:Based on traditional isoparametric planning method,grid -based local interpolation and fi tting of free -form surface machining path planning method grids and reconstructs the discrete intensive cloud of tool center points.A new method of surface machining path planning is presen ted in this ing this method,points cloud of tool center are projected and gridded,then in terpolate or fit at grid poin ts with local tool center points,and at last new tool path can be generated.With help of error func -tion,the densities of gr id and dispersion can be judged,adjusted and opti mized.Keywords:free -form surface;C NC machining;path planning;C AM1 引言随着现代工业的发展,具有自由型面的复杂零件在航空航天、汽车船舶等制造业领域的应用越来越广泛,同时相当数量的具有审美价值的产品也越来越多地将自由曲面引入到设计中。
一种基于网格简化的细分曲面生成算法
胡艳杰
【期刊名称】《杭州电子科技大学学报》
【年(卷),期】2007(027)002
【摘要】该文基于细分曲面的极限点计算方法,提出了一种采用二次误差边折叠技术生成细分曲面控制网格的改进算法,用细分极限点代替两次细分点,并增加一个存储细分极限点的顶点信息结构.实验结果表明,该算法在没有增加计算量的基础上,可以有效地提高细分曲面的质量,并适合处理复杂的几何模型.
【总页数】4页(P53-56)
【作者】胡艳杰
【作者单位】杭州电子科技大学图形图像研究所,浙江,杭州,310018
【正文语种】中文
【中图分类】TP391
【相关文献】
1.一种基于规则网格的地形简化算法 [J], 宁慧;原庆凯;郭笑语;吴悦
2.一种基于模糊推理的聚类网格简化算法 [J], 郑伟亮
3.一种基于不平滑度的网格简化算法 [J], 裴艳云;陈飞翔
4.一种基于网格简化的三维模型数字水印算法 [J], 张义;周鸣争
5.一种改进的基于二次误差测度的网格简化算法 [J], 吴韦力;王博亮;黄绍辉
因版权原因,仅展示原文概要,查看原文内容请购买。

基于网格边的复杂曲面优化展开
陈功;周来水;安鲁陵;詹雯
【期刊名称】《东南大学学报(自然科学版)》
【年(卷),期】2008(038)002
【摘要】提出了一种基于网格边的复杂曲面优化展开的新方法.该方法以曲面三角网格中各网格边的长度为优化变量,以展开前后网格边的长度误差为优化目标,以网格中各内部点均可展为约束条件,并用牛顿法和矩阵分块等方法对该优化问题进行求解,构造出与原始曲面边长误差最小的可展曲面.最后对构造出的可展曲面用基于中心三角片的"涟漪式"展开方法进行展开,从而实现复杂曲面的优化展开.数值实验结果表明,该方法具有稳定性好、收敛速度快、展开精度高、展开操作简单等优点,可以应用于各种复杂曲面的优化展开.
【总页数】6页(P340-345)
【作者】陈功;周来水;安鲁陵;詹雯
【作者单位】南京航空航天大学CAD/CAM工程研究中心,南京,210016;中国矿业大学艺术与设计学院,徐州,221008;南京航空航天大学CAD/CAM工程研究中心,南京,210016;南京航空航天大学CAD/CAM工程研究中心,南京,210016;南京航空航天大学CAD/CAM工程研究中心,南京,210016
【正文语种】中文
【中图分类】TP391
【相关文献】
1.基于曲面展开的自由曲面网格划分 [J], 潘炜;吴慧;李铁瑞;高博青
2.基于单元变形能的复杂曲面优化展开算法研究 [J], 张贤杰;王俊彪;杨海成
3.基于曲面拟合的复杂自由曲面网格划分 [J], 陈礼杰;吴慧;李铁瑞;高博青
4.基于弹簧-质点模型的三角网格曲面展开算法及其应用 [J], 韩林;刘斌
5.基于弹性模型的三角网格曲面优化展开 [J], 梁伟文
因版权原因,仅展示原文概要,查看原文内容请购买。
一种曲面网格优化的通用算法
王弘;王昌凌;袁铭辉
【期刊名称】《华中科技大学学报:自然科学版》
【年(卷),期】2001(29)1
【摘要】提出了一种曲面网格优化的通用算法 ,该算法基于一些预先定义的优化准则 ,将给定的网格曲面优化成为单位网格曲面 ,定义了两种指导优化过程的优化标准 .在优化过程中采用了三种优化算子 (边分裂、边消除、边替换 ) ,是一个简单的曲面网格优化的通用算法 .
【总页数】3页(P41-43)
【关键词】网格优化;几何插值;优化算子;单位网格曲面;优化准则;通用算法;CAD 【作者】王弘;王昌凌;袁铭辉
【作者单位】华中科技大学动力工程系;香港科技大学机械工程系
【正文语种】中文
【中图分类】TP391.72
【相关文献】
1.一种基于网格简化的细分曲面生成算法 [J], 胡艳杰
2.一种基于半边数据结构的网格曲面细分算法 [J], 郑少开;张瑞菊
3.一种带噪声的密集三角网格细分曲面拟合算法 [J], 吴剑煌;刘伟军;王天然;赵吉宾
4.一种基于矩形网格加速的曲面裁剪算法 [J], 李江伟;李吉刚
5.一种改进的不规则三角网格曲面切割算法 [J], 花卫华;邓伟萍;刘修国;尚建嘎因版权原因,仅展示原文概要,查看原文内容请购买。
保持参数分布状态的有限元变形网格B样条曲面重建算法李涛;刘浩;何纲【摘要】According to the information of original surfaces,original meshes and deformed me-shes,a method for reconstructing B-spline surfaces with consistent parametric distribution was pres-ented.In trimmedregions,initial fitting surfaces were constructed by some operations on original surfaces such as translation,extension,segment and reparametrization,etc.In untrimmed regions, bidirectional skinning method was adopted for the production of initial surfaces after inserting section lines across the highly curved boundaries and revising their parameterization.Then a loop of reparam-eterizing the nodes and refitting the surfaces proceeded until some ending rules were satisfied.During the process of iteration,a more precise method was presented for determining under-constrained re-gions by calculating extreme points of basis functions;fairness of the fitting surfaces was improved evidently by splitting coarse meshes to provide enough constraints with interpolatory quad/triangle subdivision scheme.Fitting precision is improved for trimmed surfaces by dint of boundaries and in-ternal nodes interpolation constraints together with shape preservation constraints of under-constrain-ed regions.Test results indicate effectivity of the proposed method.%针对变形前后的有限元网格模型及原始曲面模型,提出一种保持参数分布状态的B样条曲面重建算法。
一、引言三维曲面分割算法是计算机图形学和计算机辅助设计领域一个重要的研究课题。
在三维建模、渲染和仿真等应用中,需要对复杂的曲面进行分割,以便进一步处理和运用。
本文将从基础的概念开始,逐步深入探讨三维曲面分割为多个平面的算法。
二、三维曲面分割的基本概念三维曲面分割是将三维空间中的曲面切割成多个平面或者曲面片段的过程。
在计算机图形学中,曲面的表示可以是参数化的,也可以是隐式的,因此对曲面进行分割涉及到曲面的参数化表示、空间上的切割和曲面片段的提取。
常用的曲面分割算法有基于网格的算法、基于曲面拓扑的算法和基于参数化表示的算法等。
三、基于网格的曲面分割算法1. 曲面网格化曲面网格化是将曲面离散化为网格结构的过程。
将曲面表示为网格,可以方便进行分割和处理。
常见的网格结构有三角形网格和四边形网格等。
网格化的方法有点云转换、参数化生成、曲面网格拓扑构建等。
2. 离散曲面的切割对离散曲面进行切割是曲面分割的关键步骤。
常用的切割方法有三角形切割、区域分割和曲面片段提取等。
在切割过程中,需要考虑到曲面的拓扑结构和边界条件。
3. 曲面片段的提取提取曲面片段是将切割得到的曲面部分进行整合和修复的过程。
通常需要考虑到曲面片段的相邻关系、连接性和平滑度等。
四、基于曲面拓扑的曲面分割算法1. 曲面拓扑分析曲面的拓扑结构包括顶点、边和面等基本元素,通过对曲面的拓扑结构进行分析可以得到曲面的分割信息。
常用的拓扑分析方法有拓扑排序、连通性分析和曲面网格结构分析等。
2. 曲面裂变和合并曲面的裂变和合并是基于曲面拓扑结构进行的一种分割方法。
通过裂变和合并操作可以得到曲面分割的结果,同时保持曲面的连续性和完整性。
五、基于参数化的曲面分割算法1. 曲面参数化曲面的参数化表示将曲面映射到一个参数空间中,根据参数空间的分布和结构可以进行曲面的分割。
常用的参数化方法有正则参数化、等角参数化和等距参数化等。
2. 参数空间的切割曲面的参数空间可以进行划分和切割,得到曲面分割的结果。
基于曲面局平特性的快速曲面重建算法
潘丹丹;李江雄
【期刊名称】《机电工程》
【年(卷),期】2006(023)006
【摘要】提出了一种基于曲面局平特性的散乱点集的曲面重建算法.基于曲面局平特性的重建算法具有快速、内存需求少的优点,但这类算法对输入点集有局部平坦性的要求,对局部质量没有保证,容易出现空洞、重叠、法矢不连续等缺陷.通过分析对这类方法进行改进.实践结果表明,在采样点过少或极其不均匀情况下,仍能得到较好的重建质量.
【总页数】3页(P30-32)
【作者】潘丹丹;李江雄
【作者单位】浙江大学,机械与能源工程学院,浙江,杭州,310027;浙江大学,机械与能源工程学院,浙江,杭州,310027
【正文语种】中文
【中图分类】TP391
【相关文献】
1.基于数据相关性的STL曲面网格快速重建算法 [J], 杨晟院;舒适
2.基于快速Delaunay三角化的散乱点曲面重建算法 [J], 杨军;林岩龙;李龙杰;王小鹏
3.基于边界检测的三维散乱点快速曲面重建算法 [J], 倪彤光;杨长春
4.基于曲面局平特性的散乱数据拓扑重建算法 [J], 谭建荣;李立新
5.基于空间连通性的快速曲面重建算法 [J], 熊邦书;何明一;俞华璟
因版权原因,仅展示原文概要,查看原文内容请购买。
基于变形网格法的高密点云曲面重建
陈慧群;黎景炎
【期刊名称】《图学学报》
【年(卷),期】2011(032)002
【摘要】针对散乱点云庞大的特点,为提高其曲面重构效率,提出了一种三维高密散乱点云的曲面重建方法.该法首先构建一均匀网格,再通过拟合网格每个单元格的顶点到所输入点集中最近的点来实现对网格单元格进行变形,然后根据每个单元格中顶点状态模型构建三角片.该方法运行速度快,占用内存少.最后通过实例分析验证了该方法的有效性.
【总页数】4页(P64-67)
【作者】陈慧群;黎景炎
【作者单位】深圳信息职业技术学院信控系,广东深圳,518029;深圳信息职业技术学院信控系,广东深圳,518029
【正文语种】中文
【中图分类】TP391
【相关文献】
1.基于VTK的三维点云曲面重建研究 [J], 莫建文;庞建铿;袁华
2.基于激光点云的事故车辆曲面重建方法 [J], 居晨阳;陈昆山
3.基于NURBS技术的点云数据曲面重建研究 [J], 陈展
4.基于点云数据的曲面重建算法比较研究 [J], 吴旭;卢凌雯;梁栋栋;汪晓楚
5.基于二维投影的散乱点云曲面重建 [J], 何华;李宗春;阮焕立;付永健;刘增
因版权原因,仅展示原文概要,查看原文内容请购买。
基于变分隐式曲面的网格融合万华根;金小刚;刘刚;冯结青;彭群生【期刊名称】《软件学报》【年(卷),期】2005(16)11【摘要】三维物体融合利用三维模型之间的剪贴操作从两个或多个现有的几何模型中光滑融合出新的几何模型.作为一种新的几何造型方法,它正受到越来越多的关注.提出一种基于变分隐式曲面的网格融合新方法.首先利用平面截面切出网格物体的待融合边界,然后通过构造插值待融合网格物体边界的变分隐式曲面并对其进行多边形化,得到待融合网格物体间的过渡曲面,最后通过剪切掉过渡曲面的多余部分及拓扑合并操作以实现过渡网格曲面与原始网格间的光滑融合与现有的直接连接待融合网格物体边界以实现网格融合的算法相比,该方法不仅突破了对待融合物体的拓扑限制,允许多个物体同时进行融合,而且算法计算快速、鲁棒,使用方便,展示出良好的应用前景.【总页数】8页(P2000-2007)【作者】万华根;金小刚;刘刚;冯结青;彭群生【作者单位】浙江大学,CAD&CG国家重点实验室,浙江,杭州,310027;浙江大学,CAD&CG国家重点实验室,浙江,杭州,310027;浙江大学,CAD&CG国家重点实验室,浙江,杭州,310027;浙江大学,CAD&CG国家重点实验室,浙江,杭州,310027;浙江大学,CAD&CG国家重点实验室,浙江,杭州,310027【正文语种】中文【中图分类】TP391【相关文献】1.基于隐式曲面和域分解的多边形网格模型孔洞修补 [J], 刘光帅;李柏林;何朝明2.基于变分隐式曲面的三角网格孔洞修补 [J], 王乾;程筱胜;戴宁;袁天然;刘大峰3.基于GPU和区间分析的隐式曲面绘制和网格化 [J], 秦阳;蔺宏伟;冼楚华;高曙明4.基于网格优化的隐式曲面自适应多边形化 [J], 王秀友;汪继文;王浩;王峰5.基于变分隐式曲面的三角网格孔洞修补 [J], 王乾;程筱胜;戴宁;袁天然;刘大峰因版权原因,仅展示原文概要,查看原文内容请购买。
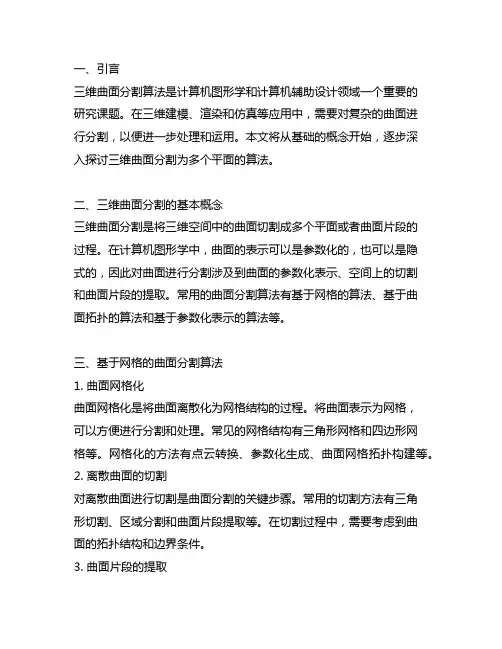
基于变分网格的曲面简化高效算法∗金勇, 吴庆标+, 刘利刚(浙江大学数学系,浙江杭州 310027)An Efficient Method for Surface Simplification Based On Variational Shape Approximation*JIN Yong, WU Qing-biao+, LIU Li-gang(Department of Mathematics, Zhejiang University, Hangzhou 310027, China)+ Corresponding author: E-mail:qbwu@Abstract:Providing fast and accurate simplification method for large polygon mesh is one of the most important research focuses in computer graphics. Approximating mesh model with a few polygons can improve the rendering speed, and reduce the storage of the model. The paper presents a local greedy algorithm to minimize the energy defined by variational shape approximation. The algorithm simplifies the mesh by controlling the number of the target polygons, while attempting to get ideal effect by adaptive seed triangles selection. The algorithm has intuitive geometric meaning. The method is efficient enough to be efficiently adopted in the geometric modeling system.Key words: Polygon mesh simplification; variational shape approximation; greedy algorithm; geometric modeling摘要: 为大型的多边形网格模型提供快速、准确的简化算法是计算机图形学中的一个重要的研究方面.以较少的多边形逼近表示网格模型,能够提高模型的绘制速度,减小模型的存储空间.本文根据变分网格逼近表示所定义的全局误差能量,提出一种局部贪心优化算法,该算法通过控制目标网格分片数来简化网格,通过种子的自适应选取以达到理想的简化效果,具有直观的几何意义.本文方法计算量少,效率较高,能够有效应用于几何造型系统中.关键词:多边形网格简化;变分网格逼近;贪心算法;几何造型中图法分类号: TP391文献标识码: A1 引言三维多边形网格模型,包括三角形网格、四边形网格等,在计算机辅助几何设计、计算机动画、虚拟现实、计算机游戏和医学影像等领域有着大量的应用.随着三维扫描技术的发展,顶点数为数万的模型已经非常常见,∗Supported by the National Natural Science Foundation of China under Grant No.10871178, 60776799 (国家自然科学基金); Technology Department of Zhejiang Province Grant No. 2008C01048-3(浙江省重大科技创新项目)作者简介: 金勇(1985-),男,上海人,博士研究生,主要研究领域为数字几何处理和计算机辅助几何设计;吴庆标(1963-),男, 浙江台州人,博士,教授,博士生导师,主要研究领域为图形与图像处理,数值计算方法,高性能并行计算和计算机模拟; 刘利刚(1975-),男,江西吉安人,博士,副教授,博士生导师,主要研究领域为数字几何处理,计算机辅助几何设计,计算机图形学和图像处理.2有的模型顶点数达到数十万甚至更多,所以在网格的多分辨率显示,加速网格着色,网格压缩等过程中需要快速的并且能够保持网格模型细节的网格简化算法.已有的多边形网格简化技术主要分为以下几种:(1) 删减(Decimation):Garland 等[1]提出一种基于边缩减的网格简化算法,该方法采用网格的顶点到其相关平面的二次距离作为度量,进行边缩减的迭代直到达到目标网格边数为止.类似地,Hoppe 等[2]、Klein 等[3]、Garland 等[4]对网格元素提出一种误差度量,其误差度量可以基于顶点坐标、颜色或是纹理坐标来建立,然后对网格元素进行迭代缩减以简化网格.删减的方法虽然可以得到有效的网格简化效果,但是该类方法得到网格往往存在边度数非常高的顶点,并且由于操作网格的拓扑结构而比较耗时.(2) 网格精炼(Mesh Refinement): Eck 等[5]、Delingette 等[6]、Lee 等[7]都提出以一个粗网格来逼近表示原始网格模型,然后以各自的策略迭代地在局部进行精炼加密粗网格以达到能够准确表示原始网格模型的精度.(3) 网格重构(Remeshing):Alliez 等[8,9],Gu 等[10]提出能够控制目标网格顶点数的网格重构方法,但是这些方法都受限制于网格的参数化,包括大量的计算和数值不稳定性.Valette 等[11,12],通过局部的的贪心算法构造近似的 Centroidal Voronoi Diagrams,然后构造CVD 的对偶图作为目标简化网格,由于CVD 的对偶图是Delaunay 三角剖分,所以该方法简化的网格有非常理想的质量,并且该方法不需要对网格进行参数化操作.(4) 全局优化(Global optimization):Hoppe 等[13]提出将网格简化问题视作全局优化问题.以一个能量函数来度量原始网格,同时通过控制网格的顶点数,顶点坐标,和拓扑连接关系以优化定义的能量函数,可以得到保持原始网格模型细节和曲率简化效果.此种方法被推广到同时使用与图像有关的度量来设计能量函数,能量函数不只是和模型的几何性质有关(Lindstorm [14]).Cohen-Steiner 等[15]提出变分网格逼近方法,该方法将原始网格分为目标数量的近似平面簇集,使用与法向有关的能量来度量平面簇集,以Lloyd 算法来得到优化的网格分簇,最后每一片分簇以一个多边形表示以得到最终的简化网格.该方法直观有效,简化后的网格模型能够有效保持原始网格的细节,且该算法由于不涉及网格拓扑的修改,使得算法简洁并且有着较好的稳定性.Cohen-Steiner 等[15]提出的变分网格逼近方法有比较理想的视觉效果,然而速度局限于Lloyd 算法的迭代次数,Lloyd 算法也无法保证得到一个全局最优的结果,并且需要后期处理(合并法向几乎一致的平面簇集)以达到理想的效果.本文主要优化一个与各近似平面簇集的特征法向相关的全局能量,通过离散该全局能量,使得能够使用局部的贪心算法优化该能量;通过初值种子点的自适应选取,可以得到比Lloyd 算法更好的效果,本文算法在时间上优于Cohen-Steiner 等[15]使用的Lloyd 算法,并且不需要后期的近似平面簇集合并处理.2 变分网格逼近问题由于三角形网格的广泛应用性,本文基于三角形网格表述算法,该算法可以非常容易的推广到多边形网格.本节约定一些术语并且介绍变分网格逼近的概念.三角形网格M 可以表示为{,,其中V 为网格顶点的集合,为网格边的集合,为网格面的集合: ,}V E F E F 3{(,,)|1i i i i V V v x y z R i N ==∈≤≤}}F12{{,},1,...,i i i E E e v v i N === (1) 123{{,,},1,...,}i i i i F F f v v v i N ===变分网格逼近理论处理将原始网格的网格面片划分为边连通的近似平面簇集,ΜF {,1,...,}i C C F i N =⊂=C C N N <<的问题,其中1,...,C F Ci N =U ,,,j i j C C i ∩=∅∀,C N 用以控制网格的简化比例,每一簇i C 中的原始网格面i f C ∈相互关于边连通.当分簇完成后,每一个簇集可以用一个多边形表示,进而可以得到一个逼近原始网格的多边形简化网格.图1表明了变分网格逼近的流程.(b) Be partioned into 100 clusters 3由上述流程可知,怎样选择网格分簇的策略是变分网格逼近的关键,Cohen-Steiner 等[15]提出,使用与法向相关的⎠(2)其中为点的单位法向量)指对向量的单位化操作运算.望给出得每一的簇集特征向量最接近,这样各个簇集都各自目标分簇数全局能量作为网格分簇策略中所优化的能量,使得简化后的网格能够更好地逼近原始网格.定义每一片簇集的特征法向量为该簇集最近似的平面的法向,可如下计算:i C i C n ()i iC v C n Unif n v dv ∈⎛⎞=⎜⎟⎜⎟⎝∫,()n v v ,(Unif 希一种分簇策略,使个簇集中的所有点与其所对应最接近于平面.给定网格{V Μ=,,}E F ,C N , 在对网格的分簇过程中,希望最小化如下度量:(3)其中单位法向量所属于式表与量与其所属于的簇集的特越接近,亦即每一个簇集越将法向相近的网格三角片归在一起.从图形的绘制上来分析,同一个簇集中的网格片格目标分簇数 (||()iC v n v n dv ∈−∫, 2)(,)||v FF C ε=()n v 为v 点的的簇集,()i C v n 为(2)式定义的特征法向量.,()i C v 为v 观察(3),特征法向量i C n 代该簇集最近似的平面的法向,将每一点的单位法向征法向量的方差的积分作为误差量,误差量越小,说明每一个簇集中的所有点与其所对应的簇集特征向量拥有相近法向则用有着相近的光照效果,有利于用一个多边形来表示一个簇集.3 算法给定网{,,}V E F Μ=,C N ,误差度量(,)F C ε,希望找到一个最优的划分使得opt C ,(F ,)min{opt C (,)}F C εε,其中形式为连续积和误差度量=C 为该目标分簇数所对应的所有可能的划分.虽然(2) (3)式给出的簇集特征法向分形式,但是最终希望得到的还是对于离散的三角形网格Μ的划分.因此,首先给i C 量和误差度量出特征向量n (,F C )ε的离散形式.,然后给出详细的分簇算法(b) 模型分为100个簇集(a) Original model of bunny, 69451 triangles (c)The simplified polygonal mesh ( chart rox (a) 原始bunny 模型,有69451个三角片c) 由分簇得到的简化多边形网格Fig. 1 Flow of variational shape app imation图1 变分网格逼近流程图4量的离注意到每个三角片3.1 误差度散和简化f F ∈的法向量可以代表该三角片中所有点的法向量,所以各簇集的单位特征法向量i C n 可以离散表示为:()n Unif n ⎛=⎜∫||||j ii j i i j ij jT C C j j T C v C j j T C n v dv Unif n n ρρρ∈∈∈∈⎞⎛⎞==⎟⎜⎟⎜⎟⎝⎠⎝⎠∑∑∑ , (4) 其中j T 为属于簇集的所有三角片i C ,j n 为该三角片的单位法向量,j ρ为该三角片的面积. (,)F C ε由此,误差度量可以离散为:2()(,)||()||iC v v FF C n v n dv ε∈=−∫210(,)||||C j i j ij i j j N T Cd j j i T C j j T C n F C n n ρερρ−∈=∈∈⎛⎞⎜⎟==−⎜⎟⎜⎟⎜⎟⎝⎠∑∑∑∑ (5)(,F C )d ε为(,)F C ε的离散形式,我们希望设计一(详细见在每一步的迭代过程中,我们需要考虑簇控制集边界变化以减小误差度量种基于迭代更新各个簇集边界以优化误差度量的算法3.2节),(,)d F C ε的可能性,为此,需要知道误差度量d (,)F C ε在簇集边界变化前后的值,如果以(5)式计算(,)d F C ε,其复杂度为O M ()N +(M 和N 为当前簇集边的两个簇集的三角片个数,这两个簇集对于误差度量的贡献由于特征法向量的变化界相邻而会发生变化,需要重新计算),显然时间开销巨大.为此,分析(5)式,得到:21(,)j j C ij i j ij j j N C T C T C F C ερ−∈∈∈⎜⎟=⎜⎟⎜⎟⎝⎠∑∑20||||||||j j iT d ji T C j j n n n n ρρρ=∈⎛⎞⎜⎟⋅−⎜⎟∑∑∑ 22212||j j C n ρ0||||||||2||||||||||C j ij i j i j i j i j i j ij ij j j j j j j j j j j j j N T C T C T C T C T C T C T C i T n n n n n n ρρρρρρρ−∈∈∈∈∈∈∈=∈⎛⎞−⋅+⎜⎟=⎜⎟⎜⎟⎝⎠∑∑∑∑∑∑∑∑∑ 120||||2||||C j ij ij iN j j j j i T C T C T C n n j ρρρ−=∈∈∈⎛⎞=−+⎜⎟⎝⎠∑∑∑∑ (6)注意到则j j ρ⎞(7)我们将可以看到(5)式具有直观的几何意义;重要的是,对于每一个簇集只需记录一个向量j ii j jT C N n ρ∈=∑,||||1j j T n ∀=,10(,)22||||C j ij iN d j i T C T C F C n ερ−=∈∈⎛=−⎜⎟⎝⎠∑∑∑i C ,5和一个标量j ii j T C S ρ∈=∑,便可以在迭代更新簇集边界时,复杂度计算出误差能量以(1)O (,)d F C ε.3.2 局部贪 根据提出一种迭代更新各个簇集贪心算法.假设网格边心算法(7)式,我们边界的e E ∈,e i C 的两侧三角形为.每一步迭考虑每一条簇集边变更以减,m n T T ,如果,m n T T 属于不同的簇集,那么称e 是一条簇集边界;所有簇集边界的集合为C E ,显然C E E ⊂代中,C e E ∈小(,)F C ε的可能性: 假设角形为所属l e ,m n T T ,的两侧三于的簇集分别.如图2可以考虑三种变更情况,可以得到三个不同的误差度量:为,k l C C 况a)(,):init d F C ε原始情:,m k n T C T C ∈∈c)b)1(,):d F C ε 将三角片n T 并入到簇集k C 中,,m k k T C T C ∈∈ (8) 2,)F C 三角片n T 并入到簇集k C 中,,m l n l T C T C ∈∈n (d ε:将将取三者之中误差度量d ε最小的作为最后的变更结果,然后更新簇集边集合C E .对于簇集边进行迭代更新,可以迭代地减小误差度量ε,直至所有簇集边的变更判断结果为C init 停止.由于每一步变更都缩小误差度量d ε,所以得到.为的连在实际迭代中使得破坏簇集的变更. 3.3 进一步每一个簇该算法的保证收敛性能够禁止此步优化在实际的计算中,对了保证簇集通性,j iT C 计算,如果簇集边的变更连通性,则集i C ,只需记录i j j N n ρ=∈∑即可.事实上的变更可能性时,只有其相关的所贡献的误差度量部分可能发生变化.由(7)式,n (9)ows,,当考虑∈k l C C U C e E 的簇集||⎜⎟C (b)k C gr ,k n k T Cm T ∈∈(c)l C grows,,m l n l T C T C ∈∈ :,m k n l T C T C ∈∈(a) 初l(a)Initi (b)增长, k 始: ,m k T C al ,m k T C n T C ∈∈,k l C C 2||||||j j j j j E n ρρρ=−−∑∑∑U j k l j k j lT C C T C T C ∈∈∈⎛⎞⎝⎠n T C ∈∈k C (c)增长l l C ,,m l T C n T C ∈∈F .2 Analysis for mo ocal clus ig dification ter borderof l 图2 局部簇集边界变更分析6的三种簇集变更情况中边e ,j k lj T C C ρ∈∑U 在3.2节(8)中为常量,所以,只需考虑||||||||k l j kC C j j j j T C j lT C L n n ρρ∈=+∑∑U =1∈2k lj k lT C C C Cj E ρ∈⎝⎠U分别⎛⎞−⎜⎟∑U (10)计算所对应的12,,init C C C 12,,init L L L 的值,取L 最大的变更情况(即对应误差度量最小)作为最后的变更结果.L 越大对应应(7)式中所对的误差度量(,d F C )ε越小,L ,观(10)式察为各簇集三角片的面为的法向以积权量和的模,由向量和的性质:一簇相同模长的向量,方向越是相同其向量和越大;所以也可以由此得到优化(7)式即(10)式的几何意义:将具有相近法向量的三角片归于同一个簇集,从而同一簇集的三角片近似属于某一特征平面,这也正是分簇目的所在. 在得到最终的优化簇集划分后,将三个簇集以上的交点可以视为多边形网格顶点,便可以得到一个多边形网格模型,注意此处多边形不一定是平面多边形.如上构造出的多此可以选择性地对多边形网格作一步后处理:各边迭代细分修正.如果3.4多边形化和三角化边形边可能无法很好地逼近该簇集的边界,由AB 为多边形网格的一条边,A 、B 为相,遍历边AB AB 距离最远的顶点P 和所对应簇集上的所有原始网格顶点,寻找出与边应多边形网格顶点边界细分为边AP 相应的距离如果d ,max /||||d AB Th >(max Th 为给定的容忍极限值),那么将边AB 和边PB .我还可以将多边形网格分片为三角形Cohen-Stei 等[15]提出的多边形边校正方法优化和三角化该多边形网格,或是以经典的多边形三角化方法将简化的多边形网格转换为简化的三角形网格.4 初始化们网格,可以使用ner 3.2节给出了更新簇集边以优化误差度量(,)F C ε的局部贪心算法,要设计一个完整的分簇算法,需要一个3.2节的贪心算法优化误差度量(,)F C ε初始分簇划分,然后实施直到收敛为止.如果使用随机的簇集初值划分,不利该用较多的多应该用较少的2) 法向几乎相同的三角形应该属于同一个簇集,比如:一个平面应该只有一个簇集.3) 相使用Meyer 等[16]对于二维流形三角网格的高斯曲率的估计,对于网格顶点,其高斯曲率为:其中于算法收敛的速度以及最终的效果,为此本文提出自适应的种子选取和簇集增长方式. 4.1 自适应的分簇初值注意到以下几个事实:1) 网格曲率越高的部分应边形去逼近表示,相对地,曲率较低的部分多边形去逼近表示.具有相近法向的三角形在最终分簇更有可能属于同一个簇集,给出一个将近法向的三角形归在同簇的初始划分,可以加快3.2簇集边更新算法的收敛速度.()()(2)/j G j v Neighbour v v A θκπθ∈=−∑, (11)为顶点周围的顶角v ,v A 为顶点的Voronoi 区域的面积.三角片的高斯曲率v ()G i T κj θ近似取为其三顶点的高斯曲率绝对值和的平均值,用以反应该三角片曲率的高低.考虑网格分簇问题:网格{,,}V E F Μ=,目标分簇数C N ,为了拥有高曲率的三角片的簇集将归并较少的三角片,拥有低曲率的三角片的簇集将归并较多的三角片.我们预测理想的分簇情况下,每一个簇集的高斯曲率总值应该接近于网格的平均值:1()D T ρκ=∑ i i G i T FC N ∈ (12)4.2 分簇初值的算法4.簇算建立每一个簇集时:随机取一个还未归属于任何一个簇集的三角片根据1节的分析,本节给出分初值的法:i C seed T 角片以作为当前簇集的种子三角片,环地更新该簇集边还未归属于任何簇集并且与该簇集边相连的三i C 界将()j j j i T C ∈∑循T T n T Unif n ρ⎛⎞−⎜⎟⎝⎠为优先级并入到停止并入三角.为了使几乎此簇集中,直到片属于一个平面的三角片只归入一个簇集当中,当簇集停止并入三角形后()j ij G j T C T D ρκ∈>∑,仍然可以将()j j 7j i T C ∈⎝T T n T Unif n dTh ρ⎛⎞−<⎜⎟⎠∑很小)的入当前簇集(dTh 三角片并C N 个簇集.至此,得到一个初始簇集划分,实际簇集数rC N 可能小于C N ,中.循环上述建立簇集的方法直到建立那么直接将C N 改为rC N .得到初始的分簇划分后,可以实现 3.2的局部贪心算法:在每一步迭代中,遍历所有的簇集边界如果将其归于另一三角片所属于的簇集;如果两三角片归于不同的我们将本文算法试验于多种网格模型,有着较好的视觉效果和较快的速度.与Cohen-Steiner 等[15]所提出果相似或略好,模增加而愈加明显,本文同时给出本文算法的例子和一些Cohen-Steiner 等[15]算法的例子(Lloyd 算法).图3为将Fandisk 模型以30个多边形逼近表示的例子,(a)、(b)为本文算法,(c)、(d)为Lloyd 算法,本文算法自适应的将底面分为了多个个簇集,需要出了较大模型Feline 和Amodilo 的例子,同样地,(a)、(b)为本文算法,(c)、(d)为Lloyd 算法,通过表1,可以看到算表1列出了所有示例的详细数据,包括收敛速度和度量误差C e E ∈,e 相邻的两三角片之一还未归于任何簇集,那么簇集,那么执行3.2中提出的变更判断,更新簇集边界C E ,直到所有簇集边的变更判断结果为C 停止.5 实例的Lloyd 算法相比,视觉效同时本文算法较Lloyd 算法有3-4倍的速度优势,且速度优势随模型规Fandisk 底面用一个簇集表示,而Lloyd 算法将后处理合并这三个簇集.图4图5给本文算法在大型模型上的速度较Lloyd 法有较大优势.init ε(模型为归一化模型),可以看到本文的算法和算法最终得到的度量误差非常接近,同时本文算法具有较快的速度.(本文的计算在一台CPU: IntelCore 2 Duo T7100 内存: 2GB 的PC 机上完成)度量LloydTable 1 Parameters of models and results of algorithm(a) (d)(b)(c)Fig.4 Feline, which has roximated by 200 polygons(a)(b): Algorithm of this paper; (c)(d): Lloyd algorithm图4 Feline,99732个三角形,49864个顶点,以200个多边形逼近表示(a)(b): 本文算法; (c)(d): Lloyd 算法99732 triangles, 49864 vertices ,is app(a) (b)(d)(c)Fig.3 Fandisk, which has 12946 triangles, 6475 vertices ,is approximated by 30 polygons;(a)(b): Algorithm of this paper; (c)(d): Lloyd algorithm图3 Fandisk,12946个三角形,6475个顶点,以30个多边形逼近表示;(a)(b): 本文算法; (c)(d): Lloyd 算法(a) (b)(c) (d)Fig.5 Amodilo, which has 331904 triangles, 165954 vertices ,is approximated by 300 polygons(a)(b): Algorithm of this paper; (c)(d): Lloyd algorithm图5 Amodilo,331904个三角形,165954个顶点.以300个多边形逼近表示(a)(b): 本文算法; (c)(d): Lloyd 算法89表1 模型参数和算法结果模型网格面数顶点数目标分簇数算法图号 时间(ms)度量误差ε Bunny 69451 35947 100 本文算法图1 5960.3898Fandisk 12946 647530本文算法图3(a),(b)76 0.0968 Lloyd 算法图3(c),(d)181 0.3712 Feline 99732 49864 200本文算法图4(a),(b)696 0.4781 Lloyd 算法图4(c),(d)2357 0.4082 Amodilo904 165954本文算法图,(b)2403 0.4092 5(a)331300Lloyd 算法图5(c),(d)8174 0.41726 结束语本文提出变分网格逼近的参数.Lloyd 算法由于受到迭代次数的限制,速度比较慢,本文提出能量优化方式,通过离散基于法向的分簇能出自适和局部贪化算理想的分结果簇果都要优于.试本文的方法易于实现,效应用型系统中了全度量目标及数后,本文的方法和都不能证得到的度量最小,其分簇结果取决于分簇初值三角形的选取.本的可以有效地减少分的影响,在实际试验中,不同的分簇初值得到的分簇结和误都很接工作究更分簇度如曲离、曲氏距离为分簇度量等. References :] Garland M, Heckbert PS. Surface Simplification Using Quadric Error Metrics. In: Whitted T, ed. Proceedings of ACM SIGGRAPH.Los Angeles: ACM Press, 1997. 209-216.Progressive Meshes. In: Rushmeier H, ed. Proceedings of ACM SIGGRAPH. New Orleans: Addison-WesleyProfessional, 1996. 99-108.[3]ck M, DeRose T, Duchamp T, Hoppe H, Lounsbery M, Stuetzle W. Multiresolution analysis of arbitrary meshes. In: Mair SG,[7] er C, ed. Proceedings of ACM SIGGRAPH. Orlando: ACM Press, 1998. 95-104.[8] Alliez P, Meyer M, Desbrun M. Interactive Geometry Remeshing. In: Appolloni T, ed. Proceedings of ACM SIGGRAPH. SanACM Press, 2002. 355-361.的一种改效算法,以制模型简化比例进的高分簇数作为控完全不同于Lloyd 算法的一种量,提应的分簇初值选取心优法以得到,在视觉效和时间上Lloyd 算法.通过大量验表明,,并且具有直观的几何意义可以有于几何造在定义局误差、划分簇集Lloyd 算法保全局误差文簇集种子自适应选取簇初值对结果果在视觉差度量上近.未来的包括研有效的量,比率、测地距,或者以法向率、欧的组合作[1[2] Hoppe H. Klein R, Liebich G, Straßer W. Mesh Reduction with Error Control. In: Yagel R, Nielson GM, eds. Proceedings of IEEE Visualization. San Francisco: IEEE Computer Society Press, 1996. 311-318.[4] Garland M, Heckbert PS. Simplifying Surfaces with Color and Texture using Quadric Error Metrics. In: Ebert DS, Rushmeier H,Hagen H, eds. Proceedings of IEEE Visulaization. Washington: IEEE Computer Society Press, 1998. 263-269.[5] E Cook R, eds. Proceedings of ACM SIGGRAPH. Los Angeles: ACM Press, 1995. 173-182.[6] Delingette H, Herbert M, Ikeuchi K. Shape representation and image segmentation using deformable surfaces. Image and VisionComputing, 1992,10(3):132-144.Lee AWF, Sweldens W, Schröder P, Cowsar L, Dobkin D. Maps: Multiresolution adaptive parameterization of surfaces. In:Machov Antonio: [9] Alliez P, Cohen-Steiner D, Devillers O, Levy B, Desbrun M. Anisotropic Polygonal Remeshing. In: RockWood AP, ed.Proceedings of ACM SIGGRAPH. San Diego: ACM Press, 2003. 485-493.1055 – 662.n M. Variational Shape Approximation. In: Marks J, ed. Proceedings of ACM SIGGRAPH. Losr Triangulated 2-manifolds. In: Hege HC,[10] Gu X., Gortler S, Hoppe H. Geometry Images. In: Appolloni T, ed. Proceedings of ACM SIGGRAPH. San Antonio: ACM Press,2002. 363-374.[11] Valette S, Chassery J-M. Approximated Centroidal Voronoi Diagrams for Uniform Polygonal Mesh Coarsening. ComputerGraphics Forum(Proc. Eurographics), 2004,23(3):381-389.[12] Valette S, Kompatsiaris I, Chassery J-M. Adaptive Polygonal Mesh Simplification With Discrete Centroidal Voronoi Diagrams. In:Lazzari G, Pianesi F, Crowley JL, Mase Kenji, Oviatt SL, eds. Proceedings of ICMI. Trento: ACM Press, 2005. 6[13] Hoppe H, DeRose T, Duchamp T, McDonald J, Stuetzle W. Mesh Optimization. In: James TK, ed. Proceedings of ACM SIGGRAPH.Anaheim: ACM Press, 1993. 19-26.[14] Lindstorm P, Turk G. Image-driven simplification. ACM Transactions on Graphics, 2000,19(3):204-241.[15] Cohen-Steiner D, Alliez P, Desbru Angeles: ACM Press, 2004. 905-914.[16] Meyer M, Desbrun M, Schröder P, Barr AH. Discrete Differential-geometry Operators fo Pothier K, eds. Proceedings of Visualization and Mathematics. Berlin-Dahlem: Springer, 2002. 34-57.附中文参考文献:[17] 孙家广. 计算机图形学. 第三版, 北京: 清华大学出版社, 1998.。