测量永磁机U相电压和Z信号位置
- 格式:pdf
- 大小:512.95 KB
- 文档页数:3
近半年前,一名业内工程师结合其在研项目和本人在论坛发表的一帖来email与本人探讨电机电角度零点的问题,由于该问题涉及电角度相位和电机转动方向之间的关系,而这一点又恰正是本人在那个贴子中并未完全理清楚的遗留问题,所以一搁就是半年,直到前一阵子才借口终于把这一问题理清了一些头绪,其实本人一直感觉在电角度问题上老是或多或少地存在着常理常清,不常理则常不清的痼疾,因此感觉确实有必要将这些许心得整理出来。
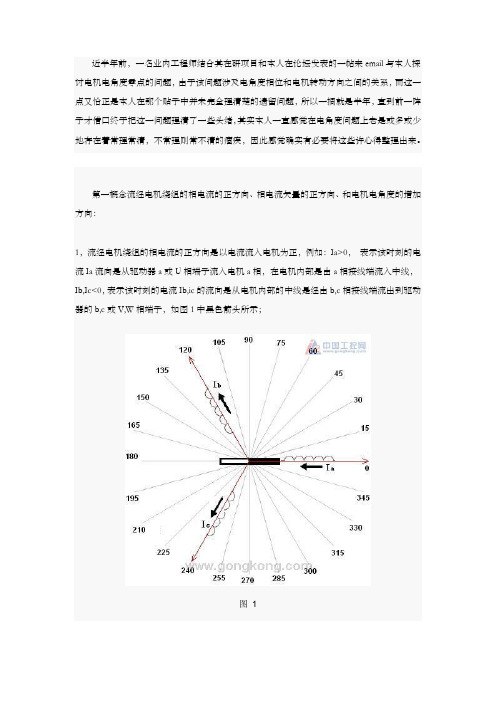
第一概念流经电机绕组的相电流的正方向、相电流矢量的正方向、和电机电角度的增加方向:1,流经电机绕组的相电流的正方向是以电流流入电机为正,例如:Ia>0,表示该时刻的电流Ia流向是从驱动器a或U相端子流入电机a相,在电机内部是由a相接线端流入中线,Ib,Ic<0,表示该时刻的电流Ib,ic的流向是从电机内部的中线是经由b,c相接线端流出到驱动器的b,c或V,W相端子,如图1中黑色箭头所示;图12,相电流矢量与电流方向的关联关系为:各相电流为正时,则a,b,c相电流产生的磁场矢量的正方向如图1中红色箭头所示;3,电机电角度的定义为当a,b,c三相反电势波形的相位关系为a相领先于b相120度、b 相领先于c相120度时a相反电势波形的相位角,如图2所示。
通常是面向电机法兰安装面和电机轴,逆时针旋转电机轴,以观察三相反电势波形的相序关系,故在此默认电机电角度的增加方向为逆时针方向,在图1和后续图示中亦然。
图21.电机电角度初始相位错位180 度电机旋转方向互反有一段时刻,自行安装编码器的两台实验电机在相同的程序控制下,转向却不同,开始只是感觉奇怪,后来就干脆将其看成“灵异”事件不了了之了。
终于有一天,借机深究了一下那个貌似奇怪的问题。
两台电机的相位对齐结果都是增量编码器的Z信号与UV线反电势波形的过零点基本对齐,默认的对齐原则上都是Z信号对齐于-30度电角度。
逆时针方向旋转其中一台电机的轴,UV线反电势波形在Z信号处由低到高过零,如图3中ε(a-b)曲线在-30度电角度处所示:图3顺时针方向旋转该电机轴,UV线反电势波形在Z信号处一样是由低到高过零,如图4中ε(a-b)曲线在Z 处所示:图4这一现象乍一看有些出乎预料,仔细分析下来不难觉察其实这完全符合反电势的生成机理。


一种永磁同步电机转子初始位置检测方法杨杰;樊卫华;朱孟韬;郑鑫;曹建新【摘要】电梯曳引机控制需要实时获取转子的机械角度,而常用的增量式编码器在首次清零信号到来前不能提供准确的转子位置信息,从而可能导致闭环控制失败;因此,转子的初始位置检测成为曳引机控制中必须解决的问题,传统的检测方法计算复杂,且定位过程中易造成转子堵转或摄动,不利于电梯系统的舒适性;为此,提出了一种利用正弦波增量式编码器的换向信号计算转子初始位置的方法,设计并实现了编码器换向信号的调理电路,研究了利用两路换向信号解算转子的初始位置信息的算法,并研发了相应的软件模块;实现了当转子保持静止时初始位置的高精度检测,满足电梯平稳启动的需求;实验结果表明,该方法不依赖电机的数学模型,运算量小,且具有较高的检测精度和通用性.%The control of Hoisting machine needs the mechanical angle of the rotor,but the incremental encoder usually cannot provide accurate location information before its clear signal comes.So,the initial position detection of the rotor becomes a problem that must be solved in the control of the traction machine.The traditional method is complicated and the rotor locked or perturbed during the positioning process,which is not conducive to improving the comfort of the elevator system.To deal with this problem,a positioning method of initial rotor position based on the commutation signal of sinusoidal incremental encoder is presented.What's more,Signal conditioning circuitry and software filtering algorithm are developed in this paper.By sampling the two commutation signals,the initial position of the rotor can be obtained with high accuracy.During the process of positioning,the rotor remainsstationary,and the detection accuracy meets the requirements of themotor smooth starting.The experimental results show that the detection method does not rely on the mathematical model of the motor,and has high universality.【期刊名称】《计算机测量与控制》【年(卷),期】2017(025)003【总页数】4页(P33-35,39)【关键词】永磁同步曳引机;初始位置;启动【作者】杨杰;樊卫华;朱孟韬;郑鑫;曹建新【作者单位】南京理工大学自动化学院,南京210094;南京理工大学自动化学院,南京210094;南京理工大学自动化学院,南京210094;江苏通用电梯有限公司,江苏扬州 225000;江苏通用电梯有限公司,江苏扬州 225000【正文语种】中文【中图分类】TP3永磁同步电机具有结构简单、调速性能好、效率高的特点,在电梯等特种设备中应用广泛。
永磁交流伺服电机位置反馈传感器检测相位与电机磁极相位的对齐方式永磁交流伺服电机位置反馈传感器检测相位与电机磁极相位的对齐方式2008-11-07 来源:internet 浏览:504主流的伺服电机位置反馈元件包括增量式编码器,绝对式编码器,正余弦编码器,旋转变压器等。
为支持永磁交流伺服驱动的矢量控制,这些位置反馈元件就必须能够为伺服驱动器提供永磁交流伺服电机的永磁体磁极相位,或曰电机电角度信息,为此当位置反馈元件与电机完成定位安装时,就有必要调整好位置反馈元件的角度检测相位与电机电角度相位之间的相互关系,这种调整可以称作电角度相位初始化,也可以称作编码器零位调整或对齐。
下面列出了采用增量式编码器,绝对式编码器,正余弦编码器,旋转变压器等位置反馈元件的永磁交流伺服电机的传感器检测相位与电机电角度相位的对齐方式。
增量式编码器的相位对齐方式在此讨论中,增量式编码器的输出信号为方波信号,又可以分为带换相信号的增量式编码器和普通的增量式编码器,普通的增量式编码器具备两相正交方波脉冲输出信号A和B,以及零位信号Z;带换相信号的增量式编码器除具备ABZ输出信号外,还具备互差120度的电子换相信号UVW,UVW各自的每转周期数与电机转子的磁极对数一致。
带换相信号的增量式编码器的UVW电子换相信号的相位与转子磁极相位,或曰电角度相位之间的对齐方法如下:1.用一个直流电源给电机的UV绕组通以小于额定电流的直流电,U入,V 出,将电机轴定向至一个平衡位置;2.用示波器观察编码器的U相信号和Z信号;3.调整编码器转轴与电机轴的相对位置;4.一边调整,一边观察编码器U相信号跳变沿,和Z信号,直到Z信号稳定在高电平上(在此默认Z信号的常态为低电平),锁定编码器与电机的相对位置关系;5.来回扭转电机轴,撒手后,若电机轴每次自由回复到平衡位置时,Z信号都能稳定在高电平上,则对齐有效。
撤掉直流电源后,验证如下:1.用示波器观察编码器的U相信号和电机的UV线反电势波形;2.转动电机轴,编码器的U相信号上升沿与电机的UV线反电势波形由低到高的过零点重合,编码器的Z信号也出现在这个过零点上。


永磁同步电机调试的总结
1.测量电机的相位:U/V/W信号测量:相位差为120度。
测试方法:U/V/W分别外接一个电阻,阻值为10K欧姆。
然后三个电阻连接在一起为地线。
使用示波器的两个表笔,测量两路的信号,然后快速转动电机,则能测量到信号,观察信号的波形,比较出信号差。
测量连接图
2.Z信号位置测量
给编码器加电,编码器能提供Z信号。
使用示波器一路测量U路信号,一路测量Z信号;然后转动电机,观察波形。
同时查看Z脉冲和U路信号的波形,能大概得出他们之间的夹角。
3.测量A,B信号:用示波器采集A,B信号,得出相对的反转
和正转。
4.小角度转动:(Z信号一定得连接上,初始位置判断,可以
不用。
)
Angle角度为定置(电角度/360 + 0.48)*2*PI, 然后给定
Ud = 0; Uq = 0.3;电机正向转动;给负Uq = -0.3;电机反向转动。
Uq增加,速度增加。
5.在第四步的基础上,放开速度环,测量电机的转速。
测量
的转速和用示波器测量的A向的脉冲个数,分别计算转速,
得出的转速应该是一样的。
6.完全放开速度环,速度环得到的IQ_GIVEN值,直接给Uq
值,然后修改速度调节值,速度可以调试。
7.然后直接将电流环,也放开,则转动异常。
8.修改g_IQ_Given = 0.1;然后再进行测试,转速正常;
9.将电流环全部打开,分析坐标变换,没有发现问题,修改
了电流环的PI调节参数,PK = 0.05; KI=0.0002,然后速度可调。
需要进行进一步测试。
第18卷第3期沈阳工业大学学报Vol.18No.3 总 第 69期Journal of Shenyang Sum No.69 1996年9月Polytechnic University Sep. 1996 永磁同步电机的位置和速度检测方法郭庆鼎 罗睿夫 王丽梅(电气工程系)摘要 介绍了用旋转变压器实现交流永磁伺服电机的磁极位置、速度检测的原理和一种新的实现方法.文中给出了实际的磁极位置和速度信号的解调电路,并对解调原理进行了详尽的分析.该方案工作可靠、检测精度较高,完全能够满足数控机床用高性能交流伺服系统的需要.关键词:旋转变压器;伺服系统;检测中图法分类::TM383.20 引 言 正弦波驱动的高性能伺服系统需要有高精度的磁极位置信号和速度反馈信号,以满足伺服系统高精度定位的需要.这也就要求系统配有高性能的磁极位置检测元件.目前,常用的检测元件主要有绝对式光电编码器、无刷旋转变压器及变磁阻式反馈传感元件.绝对式光电编码器精度虽高,但价格昂贵,可靠性较低,对机械安装要求较高,低速运行不平稳,适用性差,故应用较少.而无刷旋转变压器则不然,它结构坚固简单,成本低,低速运行平稳,检测精度较高,并且由于其与驱动器之间传递的信号为低频正弦信号,所以不受噪声的影响,抗干扰能力强.兼之能同时输出线性度达1%的高精度模拟量信号,因而在欧美的高性能交流伺服系统中广泛采用无刷旋转变压器作为磁极位置传感器.本文所论述的方法通过将旋转变压器输出的信号经高频数字化处理,从中提取出交流永磁伺服电机转子的磁极位置信号和转子速度信号.1 旋转变压器的工作原理 图1为旋转变压器的结构示意图.当旋转变压器用作角度检测反馈装置用时,只需用一个转子绕组就足够了.旋转变压器的定子绕组由两个幅值相等,相位相差90°的高频正弦电压U1、U2来激磁.U1(t)=U a sin(ω0t)本文收到日期:1994-12-03 第一作者. 男. 56. 教授 5)PROM 的输出Q12Q2为一组,Q3、Q4为一组,分别接于旋转变压器的两个励磁绕组上.其利用场效应管的开关特性形成阶梯波.由于其频率很高和电感滤波,因此近似为正(余弦波作为旋图2 旋转励磁信号与基准信号发生电路转的励磁信号.由于其采用数字化合成法,所经该波形在形状和相位上得到了严格的保证.2.2磁极位置解调旋转变压器输出的双极性信号通过高输入阻抗差动放大器后,获得单极性信号.该信号是含有转子位置信息与高频载波信号的混频信号:u =U sin (ω0+ωt )t式中 u为旋变的输出信号:U 为正弦信号的最大值:ω0为旋变励磁信号角频率:ωt为电机转子角速度.该信号经过滤波器与交流放大器后,获得没有直流分量且失真度较小的正弦波信号作为磁极位置解调电路的输入信号.磁极位置解调电路如图3所示8沈阳工业大学学报第18卷图3 磁极位置解调原理图 T P 2点的波形为正弦波,在转子转动条件下其表达式为u =U sin (ω0+ωr )t TP 2信号经反相反,输出为u =-U sin (ω0+ωr )t 这两路信号一起作为解调信号送入由D G 211C J 构成的开关电路,而由PROM 的输出信号Q 5和Q 8经反相后,作为四模拟开关的两个时间基准控制信号. 令ωn =θ,则Q 5和Q 8与TP 2为同频信号,只是相位相差θ角随转子旋转θ角不断变化,反映出转子不断变化的角位移.同理Q 5和Q 7经反相器输出后,作为另两个模拟开关的基准信号.由于Q 5、Q 7和Q 8的初相不相同,且模拟开关为高电平时闭合导通,因此可知,四,模拟开关的输出信号相差90°6电角度.又由于产生磁极位置信号的两路结构完全相同,所以若规定其中一路信号为正弦信号,另一路即为余弦信叼.获得了伺服系统控制回路所需的磁极位置信号.2.3 转子速度解调图4为转子速度解调基本电路图.旋转变压器输出的双极性信号通过高输入阻抗的差动放大器变成单极性信号———含有转子相位和高频励磁载波信号的正弦信号u =U sin (ω0+ωr )t ,该信号经滤波电路和比较器后变为与该信号同相位的方波信号.该方波信号通过与基准励磁信号鉴相及积分处理,获得两路相差180°且与电机转子转动同周期的转子相位的周期信号(锯齿波信号).此转子相们信号经微分电路获得电机旋转角速度ωr .9第3期郭庆鼎等:永磁同步电机的位置和速度检测方法图4 转子速度解调基本电路图 图5为鉴相电路构成图.此鉴相电路由两路组成,且两路电路结构完全一样只不过两路D触发器D端信号有差别.U1的D端信号来自PROM的输出端Q5,U1的D端信号来自PROM的输出端Q7,二者相位相差1/4周期.但都与励磁信号同周期.图5 鉴相电路图 由D触发器的工作原理可知,U1输出端的信号取决于CP脉 冲上升沿到来时D端的信号.当CP脉冲上升沿到来时刻,若D端为高电平,则其输出Q端为高电平,否则为低电平.由于CP脉冲信号是与旋变输出信号同周期的方波信号,故CP脉冲与D脉冲之间的相差即为电机转过的角度ωrt.所以电机旋转360°电角度,U1电平变化一个周期,即U1输出端Q端信号的周期应是电机旋转的周期.同理U1的方波周期也是转子旋转的周期,只不过是相位相差1/4周期而已.位相反的方波信号,作为J K触发器2的J K端的控制信号.由于J K触发器2的J端的频率为励磁信号频率的两倍,所以电机旋转一个周期,J和CP相差两个周期,也就是说速度解调信号的频率为电机旋转频率的两倍.J K触发器2的输出信号加于模拟开关的控制,取样两路微分电流.运算放大器A为一惯性环节,将电流信号转换为电压信号,并具有一定的滤波作用.至此,转子速度信号被解调出来.3 结 论 以上分析表明,该方案能够迅速、准确地检测出交流永磁伺服电机转子的磁极,,位置信号和速度信号磁极位置信号输出波形不但正、负半周完全对称,且峰值相等、相位相差90度.检测出的速度信号平滑,具有很高的线性度,实际在数控机床进给系统中应用证明,其精确度完全能够满足高精度交流伺服系统的需要.而且由于该方案在信号处理上采用了数字化处理手段,因而使得在此基础上实现数字化检测变得简单易行.参考文献1 Guo Qingding,Luo Ruifu,wang Limei.Fully Digital permanent Magnet Synchronous Motor Servo System Basedon DSP.Proceedings of ICPE’95,1995,30~342 郭庆鼎,王成元编著.交流伺服系统.机械工业出版社,1994A Detecting of Method Position and Speed ofPermanent Magnet Synchromous MotorGuo Qi ngdi ng,L uo R rif u W angL i mei(Dept.of Mechanical Engineering,SPU)AbstractThis paper imtrocducs a new method of dectecting absolute position and analogy velocity with re2 solver.The actual circuit of edmodulation is given.The operation theory is analyzedin detail.It has been concluded that the method is resonable,reliable and can be satisfied with the requirments of high2per2 formance AC servo system.K ey w ords:sping;tronsformers;servo system;measuring。
永磁电机转子位置检测方法摘要:本文介绍了一种基于旋转变压器与AD2S1210数字变换器相结合的转子位置检测方法。
介绍了一种用于旋转变压器信号调理电路的改进建议,它具有减小信号畸变、抑制高频干扰、提高测量准确度等优点。
该方法利用测童绕组的电压过零点和感应到的电流过零点之间的相位差来校正转子初位(初始位置)角度。
通过试验,证明了调理电路的正确性,以及转子位置初始角标定的精确性。
关键词:永磁电机;转子位置;检测标定1高速永磁同步电机转子位置检测方法PMSM相对于异步电动机,具有体积小,质量轻,效率高,功率系数高等特点。
其中,大容量低速直驱型永磁电机由于其特有的振动噪音特性,被广泛用于调查船、科考船等特殊舰船的推进系统中。
基于状态观测器的无位置传感器系统是当前国内外学者关注的焦点,其中最受关注的有:龙贝格观测器,滑模观测器,以及扩展卡尔曼滤波观测器。
通过以上对多种无需位置传感器的转子位置探测方法进行的研究总结发现,扩充卡尔曼滤波器的算法比较复杂,而且还涉及到矩阵的逆向运算,其计算量非常大,对单片机的要求也非常高,因此其在实际中的应用有很大的局限性;而高频信号注入方法只能在低转速和零转速范围内有效,无法对PMSM,尤其是HPMSM,进行全转速范围内的转子位置探测;该方法具有结构简单、算法通俗易懂、易于数字化实现等优点,但其通常采用的PI自适应控制器,其动态和稳定特性无法适用于高速PMSM的转子位置检测,低速时有轻微的振荡,高速时有很大的时滞。
滑模观测器方法响应速度快、算法简单、便于工程实施,且对外界扰动不敏感,具有良好的抗干扰性和鲁棒性,但该方法在转速数万转/分钟、乃至数千转/分钟时,仍有明显的抖振现象[1]。
综合上述各种方式的优点和不足,采用位置传感器进行转子位置探测的方式更加直观,位置检测传感器器有两类,一类是光电编码器,另一类是旋转变压器。
由于采用了光电编码器,只能获得相对位置,所以在起动过程中,还需采用其他的方式来获得电动机的初始位置。
永磁交流伺服电机位置反馈传感器检测相位与电机磁极相位的对齐方式2008-11-07 来源:internet 阅读:504主流的伺服电机位置反馈元件包括增量式编码器,绝对式编码器,正余弦编码器,旋转变压器等。
为支持永磁交流伺服驱动的矢量控制,这些位置反馈元件就必需能够为伺服驱动器提供永磁交流伺服电机的永磁体磁极相位,或曰电机电角度信息,为此当位置反馈元件与电机完成定位安装时,就有必要调整好位置反馈元件的角度检测相位与电机电角度相位之间的彼此关系,这种调整能够称作电角度相位初始化,也能够称作编码器零位调整或对齐。
下面列出了采用增量式编码器,绝对式编码器,正余弦编码器,旋转变压器等位置反馈元件的永磁交流伺服电机的传感器检测相位与电机电角度相位的对齐方式。
增量式编码器的相位对齐方式在此讨论中,增量式编码器的输出信号为方波信号,又能够分为带换相信号的增量式编码器和普通的增量式编码器,普通的增量式编码器具有两相正交方波脉冲输出信号A和B,和零位信号Z;带换相信号的增量式编码器除具有ABZ 输出信号外,还具有互差120度的电子换相信号UVW,UVW各自的每转周期数与电机转子的磁极对数一致。
带换相信号的增量式编码器的UVW电子换相信号的相位与转子磁极相位,或曰电角度相位之间的对齐方式如下:1.用一个直流电源给电机的UV绕组通以小于额定电流的直流电,U入,V 出,将电机轴定向至一个平衡位置;2.用示波器观察编码器的U相信号和Z信号;3.调整编码器转轴与电机轴的相对位置;4.一边调整,一边观察编码器U相信号跳变沿,和Z信号,直到Z信号稳固在高电平上(在此默许Z信号的常态为低电平),锁定编码器与电机的相对位置关系;5.来回扭转电机轴,撒手后,若电机轴每次自由回答到平衡位置时,Z信号都能稳固在高电平上,则对齐有效。
撤掉直流电源后,验证如下:1.用示波器观察编码器的U相信号和电机的UV线反电势波形;2.转动电机轴,编码器的U相信号上升沿与电机的UV线反电势波形由低到高的过零点重合,编码器的Z信号也出此刻那个过零点上。
永磁同步电机转子初始位置的检测方法
王冉珺;刘恩海
【期刊名称】《电机与控制学报》
【年(卷),期】2012(016)001
【摘要】针对永磁同步电机初始位置检测已有方法依赖电机参数,电流相位提取算法复杂,并在检测过程中会造成转子发生转动等问题,提出一种基于高频电压信号注入检测电机初始位置的方法.该方法通过对高频电压响应的电流进行解调、滤波和最小二乘拟合处理后,再计算出正弦化响应电流最大值时的相位,便得到获取转子初始位置信息,最后利用磁路饱和凸极效应,判定永磁体的极性.仿真及实验结果表明,该方法能准确检测出转子初始位置,不会使转子发生移动,也不需要知道电机的参数,硬件结构简单.位置检测的平均误差为3.33°,可满足永磁同步电机的平稳启动需求.【总页数】5页(P62-66)
【作者】王冉珺;刘恩海
【作者单位】中国科学院光电技术研究所,四川成都610209;中国科学院研究生院,北京100039;中国科学院光电技术研究所,四川成都610209
【正文语种】中文
【中图分类】TM351
【相关文献】
1.基于新型高频注入法的表贴式永磁同步电机转子初始位置检测方法 [J], 洪琨;刘刚;毛琨;吕晓源;周新秀
2.基于相电流正负序分量相角差的高精度内置式永磁同步电机转子初始位置检测方法 [J], 刘景林;鲁家栋
3.内置式永磁同步电机转子初始位置检测方法 [J], 刘庆飞
4.一种永磁同步电机转子初始位置检测方法 [J], 杨杰;樊卫华;朱孟韬;郑鑫;曹建新
5.基于高频信号耦合注入的内置式永磁同步电机转子初始位置检测方法 [J], 李新旻;陈伟;张国政;王志强;陈炜
因版权原因,仅展示原文概要,查看原文内容请购买。
电机位置测量
1编码器引线焊接
将编码器8芯信号和电源线长度定好,将出线按照下表对应关系分别焊接在9针串口(公口)插头上,供控制板使用。
2确定发电机转向的正方向
把做好的编码器接头插到DB9转网口的小板,再用网线将转换板和控制板连接起来,把控制板和显示屏也通过网线连接起来,控制板给24V电源。
用变频器转动电机,观察液晶屏首页首行转速显示,有非零数值定义此时转向为正向,值为零时调整电机接线以调整电机
转向,记下电机正方向,后续测量均以此转向为前提。
转接板
3确定发电机输出相序UVW
给风机输出三相电接一组星型负载,阻值200欧左右得3个功率电阻即可,用数字示波器3个探头分别接UVW,负极夹子接星型负载中性点。
启动变频器使得发电机以额定转速正向旋转,观察示波器三相电压波形,定义电机输出线分别为U、V、W使得U相超前V相120度,V相超前W相120度,三相线做好标记相序不能更改。
4示波器测量UV相电压和编码器Z信号夹角
示波器1通道接编码Z信号,信号幅值5V,示波器触发电平设置为4V左右,上升沿触发;2通道接发电机经过电压互感器变换之后的电压信号。
调节示波器时基和两通道垂直分辨率,使得示波器屏幕上有稳定的一周期电压信号,Z信号和UV相电压信号保持相对静止,记录下示波器屏幕显示图片。
下图为板子图片,测量时需要先拆下核心板。
底板右下部绿色引出线为Z信号引出线;底板中下部橙色引出线为参考地,接示波器地线夹子;板子中上部紫色引出线为UV相线电压引出线,UV相电压需要接入端子J15,其中U相线接入端子L侧,V相线接入端子N侧,顺序不能错。
测量时电机和变频器需要接地线,否则杂波信号很大,干扰测量。